

Программная среда CoDeSyS 3.5
23 поста
23 поста
9 постов

5 постов

2 поста

3 поста
3 поста
Перезапустил сайт по компонентам автоматизации

Про оборудование, контроллеры, программы, особенности настройки и т.д.
Продолжаю настраивать SCADA SimpLight 5.
На связи Гридин Семён, автор канала "Ты же инженер АСУ ТП".
В отличие от других СКАД Simplight имеет немного другой АЙТИшный подход к реализации своих функций. В этом есть и плюсы и минусы.
Приведу простой пример на иконке Насоса.
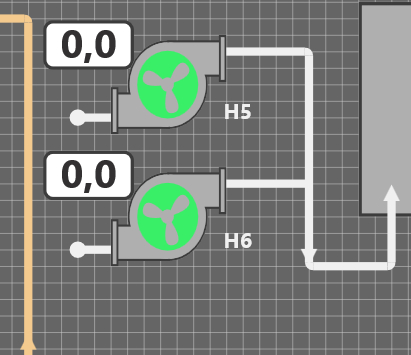
В нашем примере попробуем переменной поменять цвет, а другой выдать Аварию.
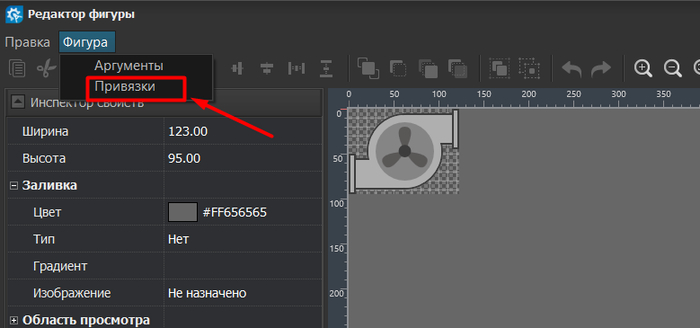
Для начала нам нужно зайти в отдельный редактор фигур.
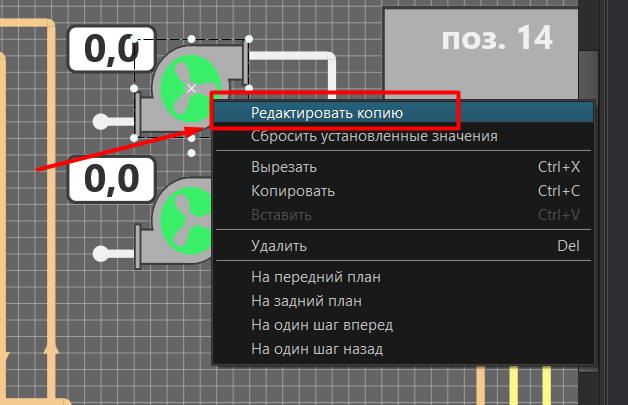
Нажимаем редактировать копию.
Нам нужно настроить логику работы смены цвета и привязать к конкретному аргументу.
Жмём Фигура-Привязки
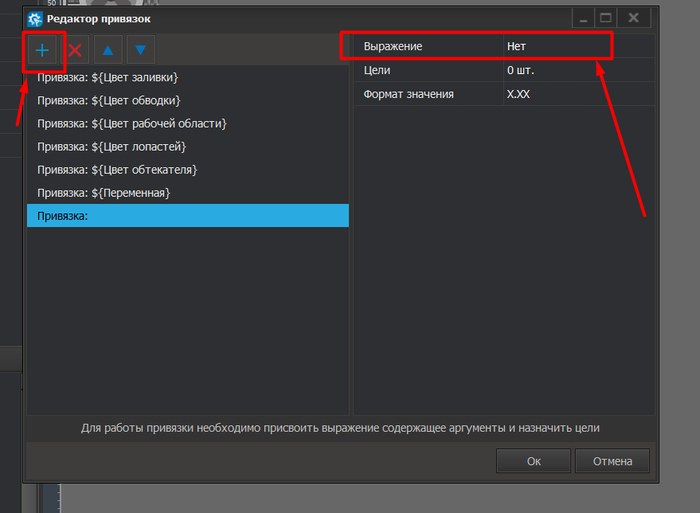
Первая штатная привязка это анимация насоса. Нам цвет, добавляем новую ривязку.
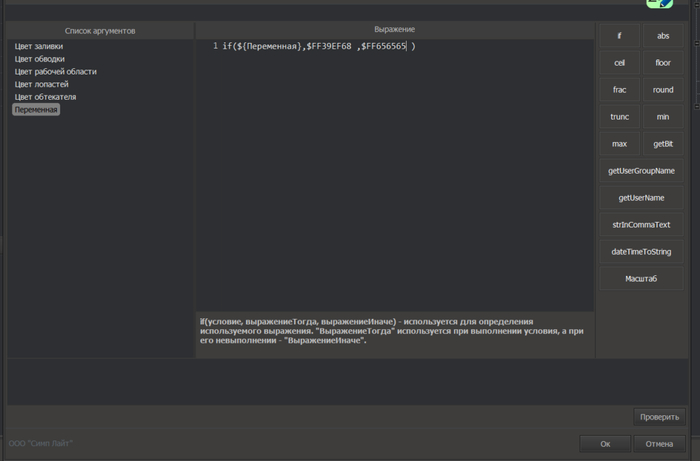
Добавляем переменную. Пишем ей логику Если вкл. - то цвет зелёный (пишем шифр цвета) - иначе цвет штатный. Жмём проверить и Ок.
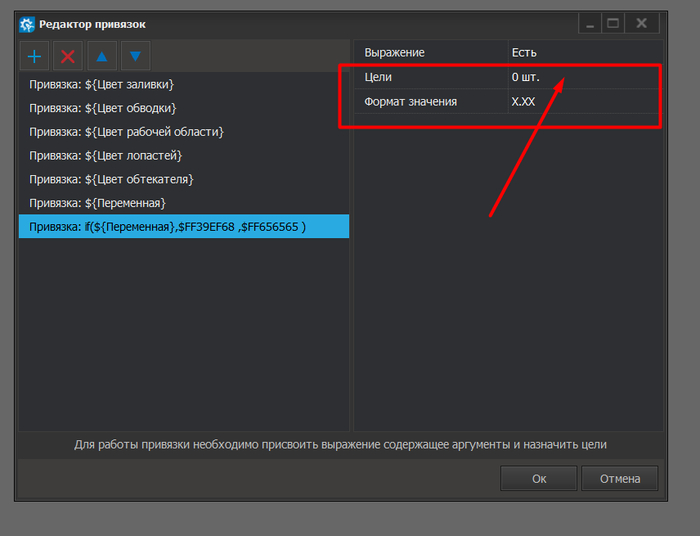
Сделав привязку, нам нужно указать ей цель (повернуть, переместить, свернуть, поменять цвет, анимация и т.д.)
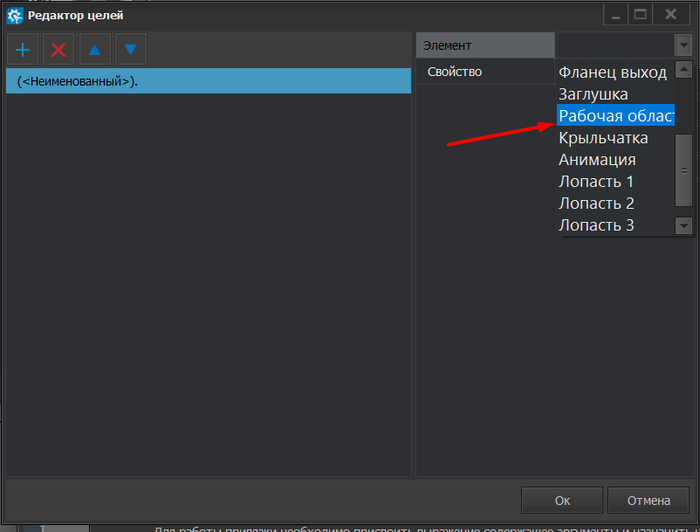
Выбираем рабочую область насоса. Свойство Fill.color (сменить цвет). Всё, нажимаем несколько раз Ок.
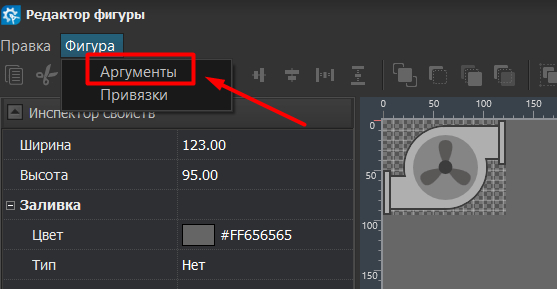
Мы можем добавить несколько переменных к объекту и по желанию сделать несколько действий, сейчас хочу сделать Аварию. Добавляю Аргумент.
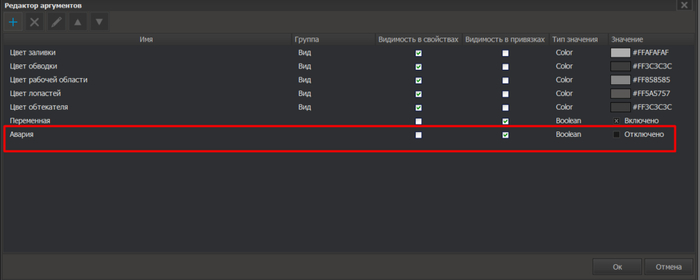
Пишу Авария - boolean - по умолчанию отключена.
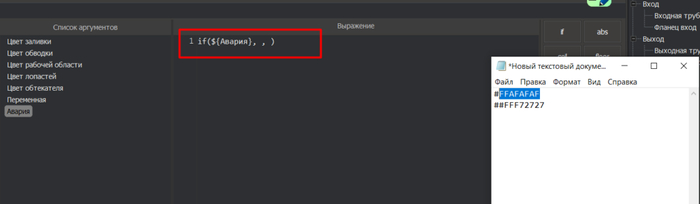
Прописываю в привязке всё тоже самое, только цвет красный.
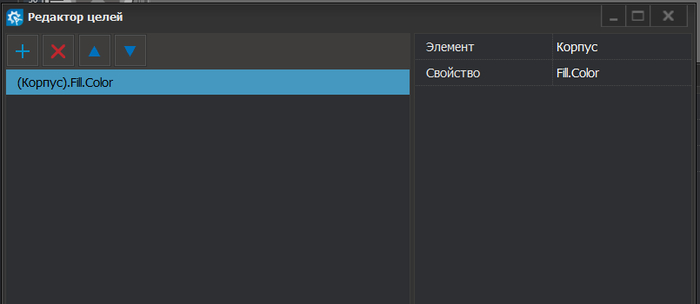
В Fill.Color добавил корпус и крыльчатку.
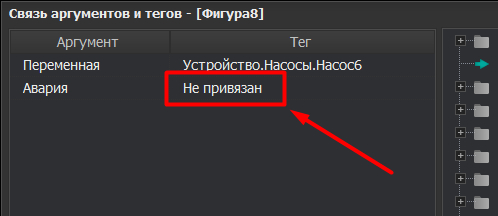
В основной мнемосхеме Мне нужно к аргументу Авария привязать переменную с ПЛК.
Всем пока-пока, на связи.
Анекдот дня.
Мы с коллегами собрали..
Сколько нужно специалистов, чтобы вкрутить электрическую лампочку?
Ответ: Больше пяти.
Первый ставит задачу, второй пишет техзадание, третий анализирует бизнес-процесс в целом, четвертый моделирует ситуацию в реальном времени, а пятый занимается юридическими аспектами проблемы. И еще нужен электрик.
Ну чаще всего не хватает и столько. Нужно больше тех. специалистов.
Четверо вращают стол, один держит лампочку. 🍿🍿🍿
Всех приветствую дорогие друзья. С вами на связи Гридин Семён. Поработал сегодня с двумя сущностями Codesys 3.5 и SCADA SimpLight 5.
О чем вкратце изложу опыт работы в очередной последовательности.
Все вопросы можете задать в тг-канале "Ты же инженер АСУ ТП".
Будем считать, что у вас всё установлено. По установкам ПО можно найти документацию и мануалы.
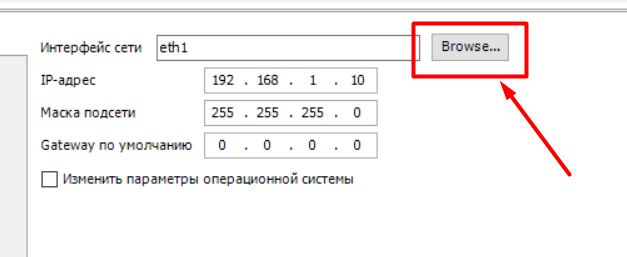
Суть следующая - нам нужно сделать ПЛК с Modbus TCP Slave. В моем случае ПЛК200 использует оба порта Ethernet. 1 опрашивает модуль - является мастером. 2 порт работает в режиме Slave.
Для того чтобы работал 2 порт в режиме LAN нужто зайти в его веб-настройки и отконфигурировать.
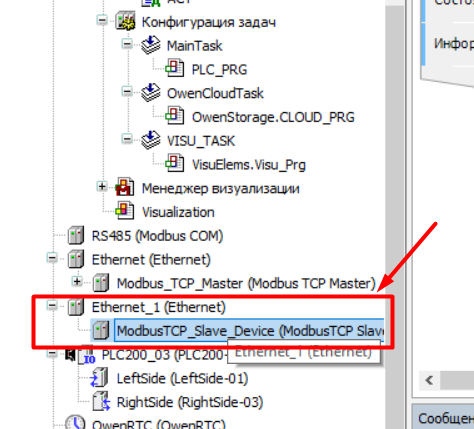
Дальше добавляем модуль Ethernet.
Нужно связаться с ПЛК и выбрать по какому порту ему отдавать.
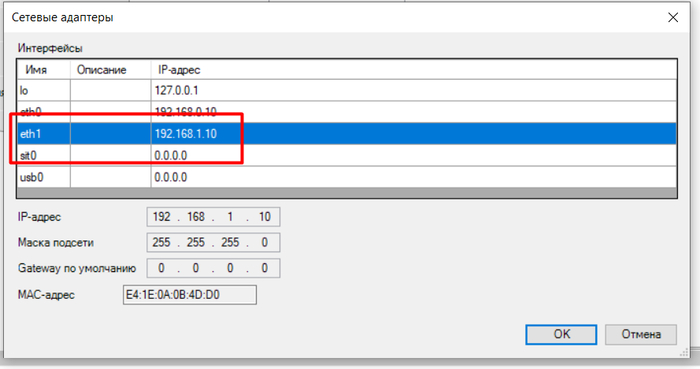
Выбираем преднастроенный порт.
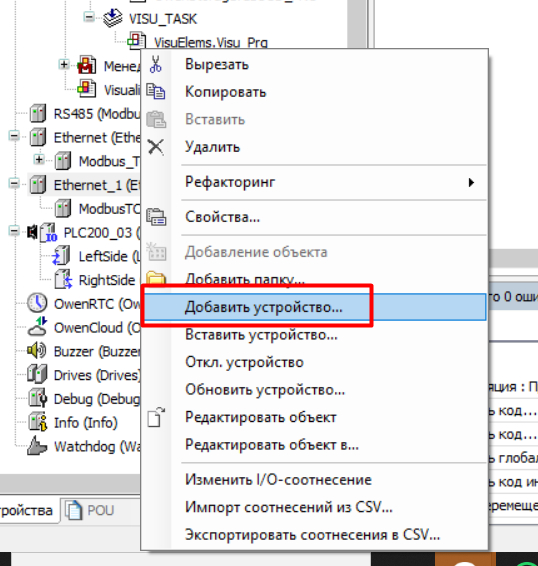
Добавляем устройство.
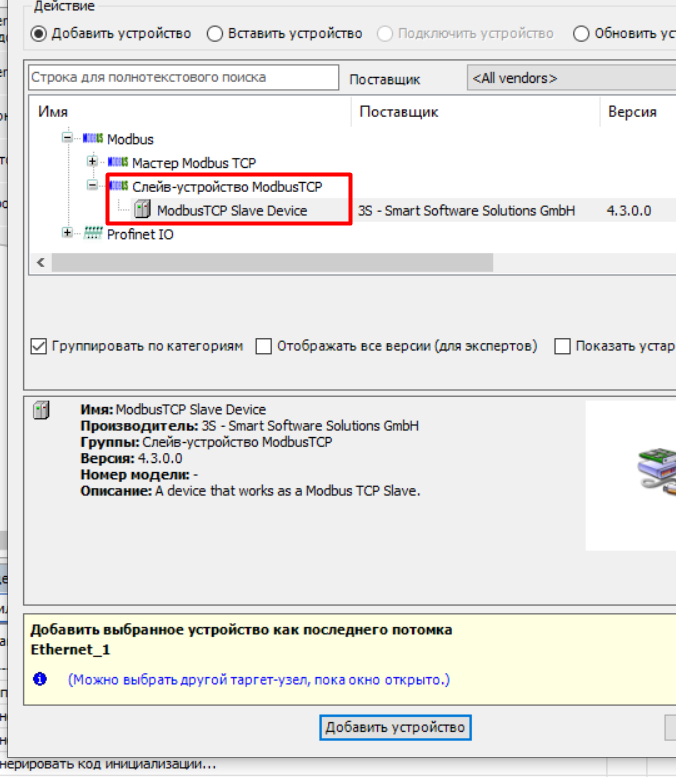
Выбираем TCP Slave.
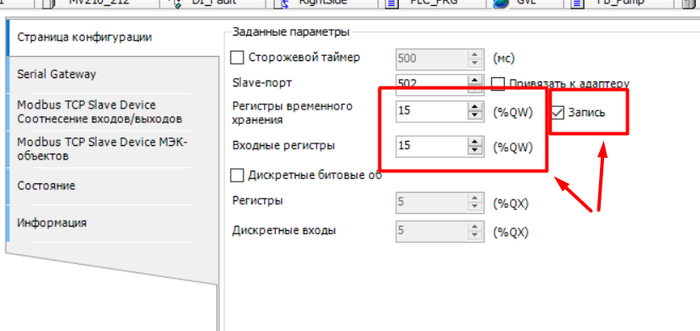
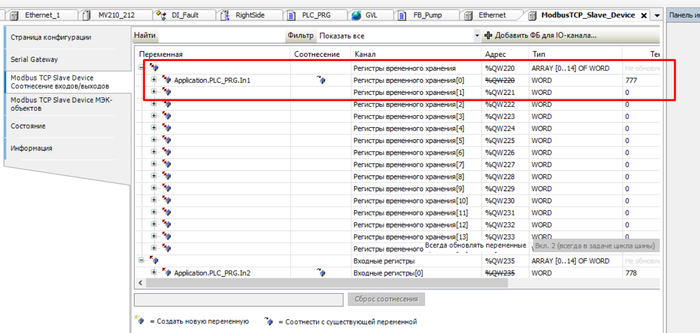
Далее залезаем в его настройки, вводим количество регистром и ставим галочку на запись, если нужно read\write.
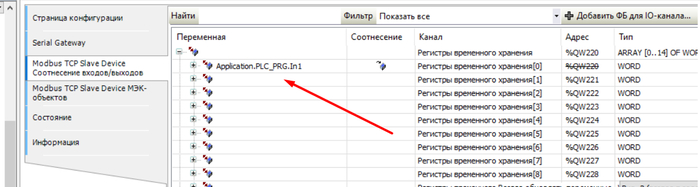
Во вкладке соотнесение входов выходов вносим переменную. Переходим на следующий этап.
Далее работаем со SCADA. Будем считать, что она скачана, установлена и запущена Среда разработки.
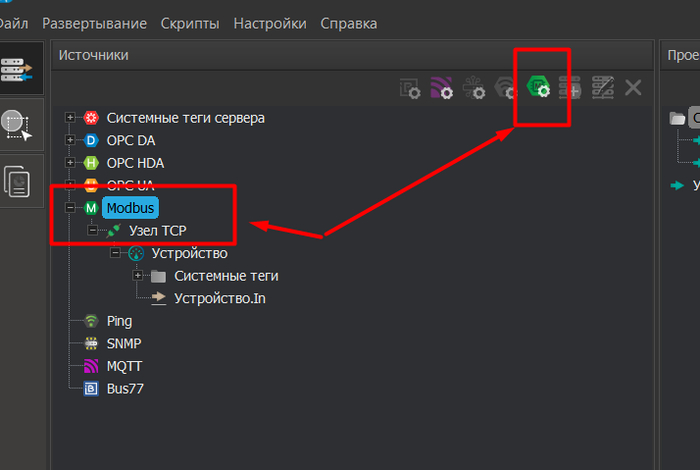
Список различных драйверов. Выбираем напрямую Modbus Драйвер, заходим в настройки.
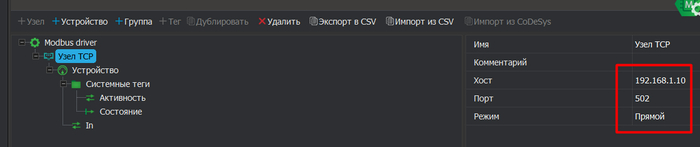
Настраиваем Узел. В моем случае IP 192.168.1.10.
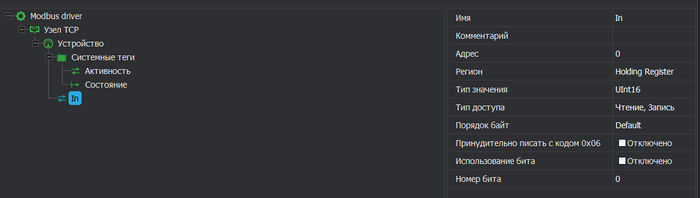
Вносим тег. У ПЛК 200 в режиме TCP Slave адресация начинается с 0.
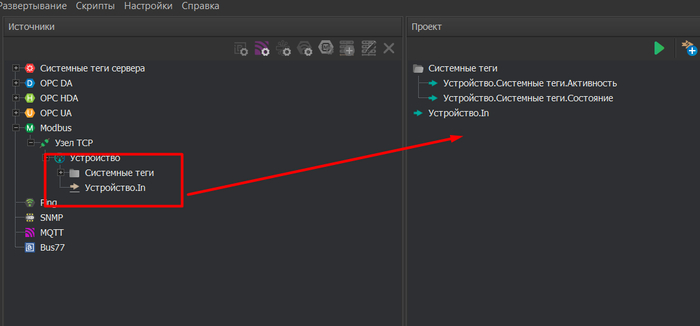
Перетаскиваем теги в Проект.
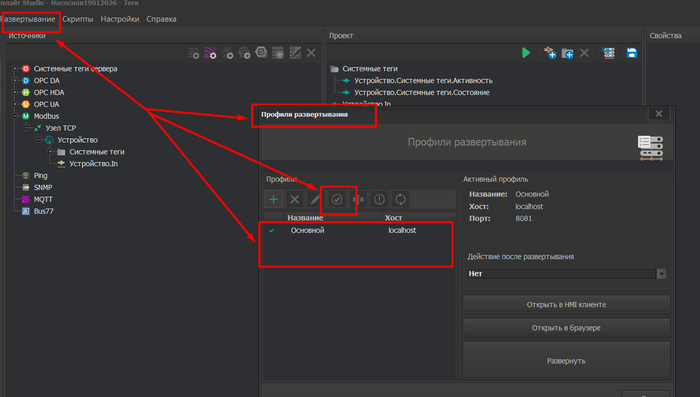
Прежде чем запускать сервак. Нужно для него создать профиль и нажать птичку, что именно этот сервер мы используем.
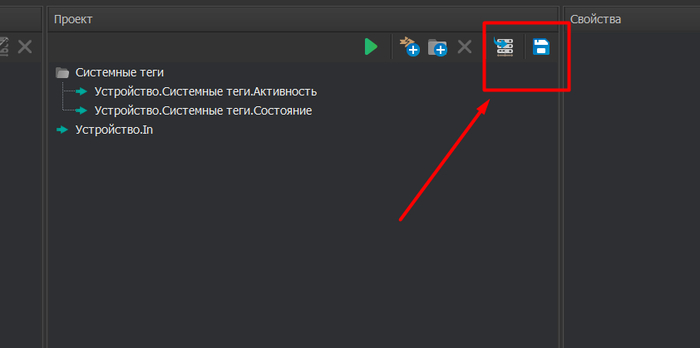
После этого сохраняем проект и запускаем сервер.
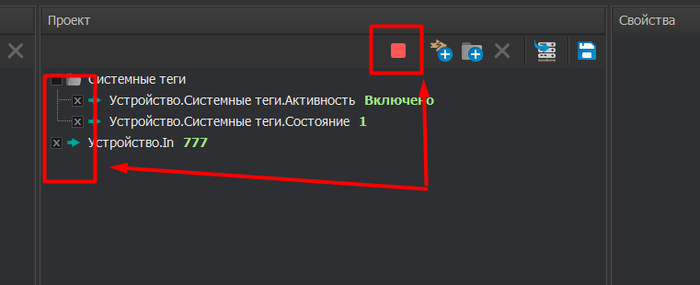
Ставим маленькие галочки - чего опрашивать, зеленую стрелочку Пуск. И наблюдаем ТРИ топора, и что вообще чё то включено.
В программе благополучно отдаём ТРИ топора.
На этом всё друзья. Пишите в чатах..
Очень удобная система. Как можно не париться и с помощью импорта тегов перенести переменные с ПЛК в панель.Интересно, а с ОВЕН ПЛК прокатит такой номер?Дизайн делали максимально простой. Понятный. Может где-то кривовато, но всех устроило (заказчика тоже).
Подробнее в канале ТГ.
Всем пока, пока..
🌡️ Термопары: как кусочек проволоки измеряет температуру от -270°C до +1800°C (и зачем это нужно вам)
Вы когда-нибудь задумывались, как в духовке, двигателе или даже в космическом аппарате измеряют температуру? Ответ — термопара.
Просто, дёшево, надёжно. И работает там, где другие датчики сдаются.
Пообщаться с коллегами и со мной можно в ТГ-канале "Ты же инженер АСУ ТП".
Представьте: два разных металла скручены вместе на одном конце. Нагреваете это место — и между свободными концами появляется напряжение. Чем горячее — тем больше напряжение. Это и есть термопара.
👉 Основана на эффекте Зеебека — физическом явлении, открытом ещё в 1821 году.
📌 Не нужны батарейки, процессоры или Wi-Fi. Только два провода — и можно мерить температуру от криогенной до раскалённой стали.
Все термопары делятся на типы — по материалам, из которых сделаны провода. Каждый тип — как отдельный “спец" под свою задачу.
Вот самые популярные:
Хромель + Алюмель
✅ От -200°C до +1350°C
✅ Дёшево, надёжно, везде используют
❌ Не любит серу и вакуум
📌 Где встретите: духовки, котлы, промышленные печи
💡 Цвет изоляции — жёлтый. Запомните — увидели жёлтый провод? Скорее всего, это K-тип.
Железо + Константан
✅ Очень высокая чувствительность — легко ловит малейшие изменения
✅ Дешёвый
❌ Ржавеет! Не для влажной или окислительной среды
📌 Где встретите: старые станки, пластиковые экструдеры
>⚠️ Не кладите в печь выше 750°C — начнёт “плыть”.
Медь + Константан
✅ Идеален для низких температур: от -200°C
✅ Очень точный и стабильный
❌ Медь окисляется — не для жары выше 350°C
📌 Где встретите: холодильники, морозильные камеры, лаборатории
> 🍦 Используют даже в производстве мороженого!
Хромель + Константан
✅ Даёт самое большое напряжение на градус — легко измерять
✅ Отлично работает на холоде
❌ Константан “боится” влаги
📌 Где встретите: научные эксперименты, криогенные установки
> 📈 Если нужна точность при -100°C — это ваш выбор.
Нихросил + Нисил
✅ Устойчив к окислению и радиации
✅ Не “дрейфует” при высоких температурах (в отличие от K)
❌ Дороже
📌 Где встретите: АЭС, аэрокосмическая промышленность
> 🚀 NASA иногда использует именно его — надёжность на первом месте.
Платина + Родий
✅ Работают до +1800°C (!)
✅ Самые точные и стабильные
❌ Очень дорогие — в 10-100 раз дороже обычных
📌 Где встретите: лаборатории, металлургия, производство стекла
> 🏆 Тип S — эталон для калибровки других датчиков.
Турбо-выбор термопары.
| Нужна температура... | Берите тип |
| ...ниже -100°C | **T или E** |
| ...до 400°C, нужна точность | **T** |
| ...до 1000°C, бюджет | **K** |
| ...до 1300°C, стабильность | **N** |
| ...выше 1400°C | **S, R, B** |
| ...в агрессивной среде | **N или платиновые** |
Термопары — не всегда “голые провода”. Чаще вы увидите:
- 🔩 В металлической гильзе — чтобы не сгорела в печи
- 🧵 В стеклотканевой изоляции — для химических производств
- 🔌 С разъёмом — чтобы быстро заменить
- 📏 В виде тонкой иглы — для измерения температуры в продуктах
- 💪 Надёжны — никакой электроники внутри, которая может сгореть
- 🌡️ Широкий диапазон — от жидкого азота до расплавленного металла
- 💸 Дёшевы — особенно тип K
- ⚡ Быстро реагируют — доли секунды!
❗ Нужна компенсация холодного спая — если не учесть температуру на конце провода (где подключён прибор), будет погрешность
❗ Нужен усилитель сигнала — напряжение очень маленькое (микровольты!)
❗ Со временем металлы “стареют” — показания могут “уплывать”
- В духовке или мультиварке
- В котле отопления
- В автомобиле — датчик температуры выхлопных газов
- В кофемашине
- В промышленных холодильниках
- Даже в ракетах и спутниках
На этом я заканчиваю, всем пока-пока!!
1. Используйте только однобуквенные имена переменных
Например, вместо `ConveyorMotorSpeed` пишите `x`. Так никто не догадается, что переменная управляет скоростью конвейера, и проект превратится в головоломку для коллег.
2. Не комментируйте код вообще
Пусть все догадываются сами! Например, строчка `IF NOT NOT x THEN y := TRUE;` без пояснений станет загадкой на века. Это добавит проекту атмосферы таинственности.
3. Храните все данные в глобальных переменных
Зачем использовать локальные переменные или структуры? Пусть всё висит в `GVL`, чтобы изменения в одном месте ломали логику в десяти других. Это ускорит развитие хаоса.
4. Пишите всю логику в одном ПЛК-цикле
Забудьте о разделении на функциональные блоки или программы. Дайте все 10 000 строк кода в `PLC_PRG`. Это повысит производительность... ну, как минимум, нагрузку на мозг разработчика.
5. Используйте таймеры и счетчики без сброса
Например, вставьте один таймер `TON` в несколько условий одновременно. Пусть его состояние "плывет" между задачами — это добавит неожиданности в поведение системы!
6. Не тестируйте логику до загрузки на железо
Зачем использовать симуляцию? Лучше сразу запускайте код на реальном оборудовании. Внезапные сюрпризы вроде заклинившего сервопривода сделают рабочий день ярче.
7. Применяйте операции с плавающей точкой для таймеров
Например, умножьте `T#5s` на `1.0000001` и удивляйтесь, почему таймер срабатывает несвоевременно. Это идеальный способ запутать даже опытного инженера.
8. Игнорируйте резервное копирование
Делайте правки прямо на боевом контроллере, не сохраняя проект. Если всё сломается — просто начнёте всё с нуля. Это тренирует память и стрессоустойчивость!
9. Мешайте логику управления и визуализации
Пишите код для HMI прямо в ПЛК-программе через `IF HMI_Button THEN ... END_IF`. Так вы создадите идеальный микс между технологической логикой и интерфейсом.
10. Не используйте версионирование
Сохраняйте проект каждый раз под новым именем: `Project_v1`, `Project_v2_final`, `Project_v3_реально_последний`. Через месяц вы сами забудете, где какая версия.
Одно из собеседований с программистом ПЛК:
- какую зарплату хотите ?
- 300 000 руб
- на каком языке программируете?
- на английском
Реальная история. Это не анекдот, серьёзно, что смешного?
Много интересных историй в ТГ-канале.
