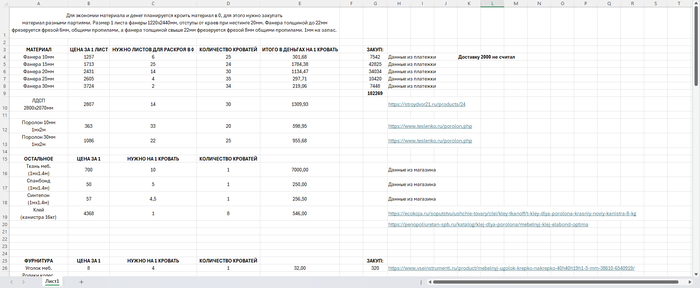
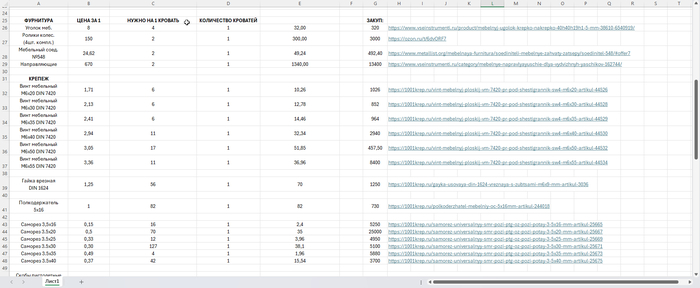
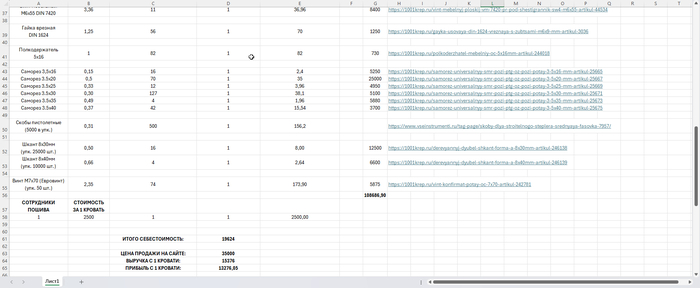
Себестоимость материалов? 19000+- рублей (все расчеты в конце поста)
Можно ли сделать кровать в гараже? Скорее нет, чем да
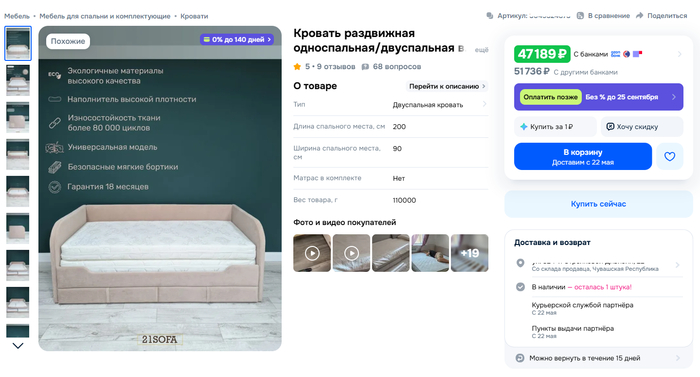
Речь пойдет о такой кровати:
1/2
История о том как конструировали детскую кровать, насколько это сложно и как выходили на маркетплейсы
Немного предыстории:
До работы над кроватью товарищ занимался изготовлением мягкой мебели под заказ, делал как физическим лицам, так и организациям. Потом это ему надоело и он решил начать делать серийку, за основу взял изготовление мягких кресел, вот таких:
1/3
Удалил название магазина чтобы не сочли за рекламу
Для этого товарищ купил самый обычный ЧПУ, а как на нем работать - чет не подумал.
Вот тут уже в историю вписался и я. У меня есть опыт с ЧПУ (Rover, KDT), обучил человека работать в CorelDRAW и ArtCAM. Также на меня упали задачи по разработке и карточек для товаров (ну, мы же на маркеты собрались).
Конец предыстории, теперь к кроватям:
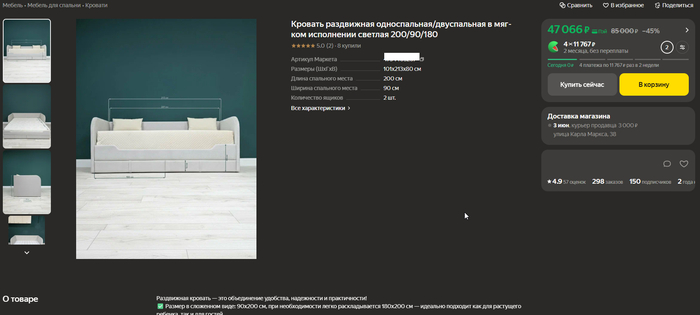
Поняв, что на этих креслах далеко не уехать, а денег особо нет, то решили делать кровати, вот такие:
1/8
Последнее фото - как на самом деле выглядит своя мини студия
Кровать целиком из фанеры, только ящики из ЛСПД. Для изготовления использовали фанеру 8мм, 10мм, 15мм, 20мм, 25мм, 30мм. Эмиссия фанеры 0.5, максимум 1, т.к., кровать детская, сертификаты естественно имеются.
Себестоимость на август 2025 была порядка 16 тысяч (без учета амортизации станков и если не брать в учет затраченное на сборку время с зарплатой себе).
В отличии от кресел, кровать уже не возили в фотостудию, а сделать подобие студии в цеху - покрасили стену, постелили линолеум на пол. Ну а дальше обработка в Gemini и PhotoShop, ну и создание карточек товара в CorelDRAW. Дальше была разработка еще и видео инструкции в Premiere PRO для покупателей и это уже все висело на мне. Учитывая что тут куда больше деталей, то написание управляющих программ тоже стало моей задачей и еще там по мелочи.
Так вот. Товарищ хотел также по старинке делать чертежи в CorelDRAW, что мне показалось безумием. Ну ок, что ж. В итоге естественно это начало приводить к ошибкам, в конце я плюнул и сел изучать SolidWorks и хотя бы уже видеть модель в натуральную величину и оттуда вытаскивать DXF для ArtCAM.
Кровати на маркетах товарищ выставил через магазин знакомого и продажи пошли. Изначально товарищ мне подкидывал немного денег, типа продажи пойдут и все будет, ну и собственно я как бы держался. Ну а как продажи пошли - давай до свидания, ну или давай ко мне оператором ЧПУ 2/2 за 2500 в день.
Окай, что ж, отказался и сказал что тоже буду делать кровати, на что он отреагировал норм. Побегал по своему городу в поисках партнёров, но не нашел. Все предлагали услуги частного раскроя, а дальше сам.
Когда только залил shorts на YouTube и написал комментарий в "Привет макет", то оттуда прилетело несколько заказов и после этих слов товарища чет понесло.
Ну а написавшим ответил что так и так, пока собираю пачку заказов, чтобы закупить материал оптом. Ну и естественно сообщил что первые партии будут по спец цене, ну 25-30, точно не могу сказать, т.к., не знаю конечную себестоимость.
В итоге в телеграмм нашел ребят с Самары, обсудили что и как, перекинули чертежи из SloidWorks в Базис мебельщик и поехал к ним. Ехал я к ним из Чебоксар собственно говоря.
1/6
У ребят свое помещение, начали заниматься мебелью летом 2025 года, есть торцевой присадочник и кромочник
Обивали они уже без меня, ибо швею на дому успел найти еще сам до отъезда обратно в Чебоксары:
Но в силу загруженности у ребят не получилось обить ее быстро. Я если честно потерял надежду что получится с ребятами работать, ибо ну реально долго что-то это все, поэтому начал искать снова партнера у себя в городе.
К слову нашел, у человека огромное помещение, 2 больших цеха, несколько ЧПУ станков, кромочники, присадочники, распиловочные ЧПУ и т.д.
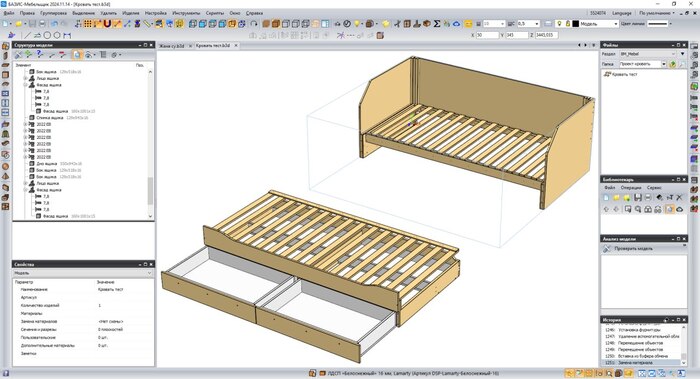
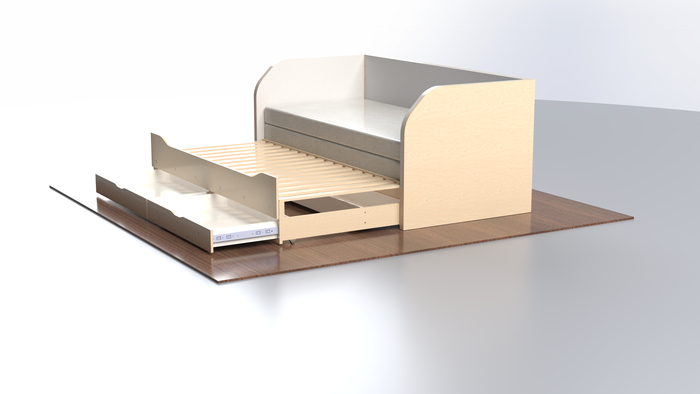
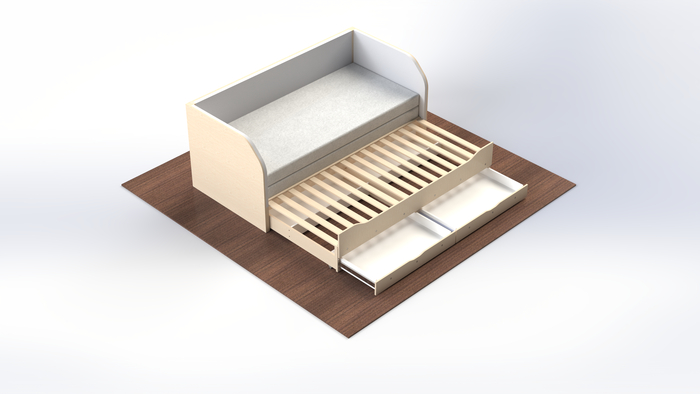
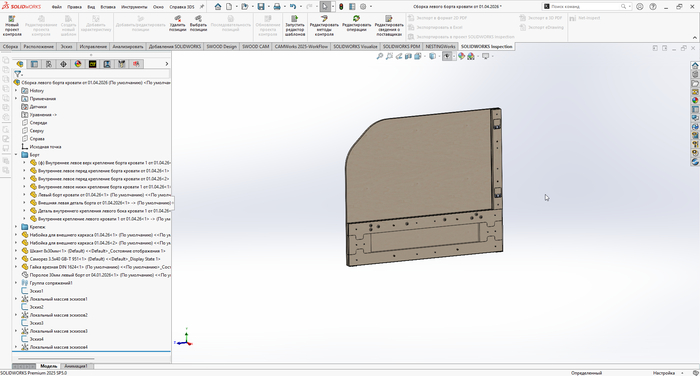
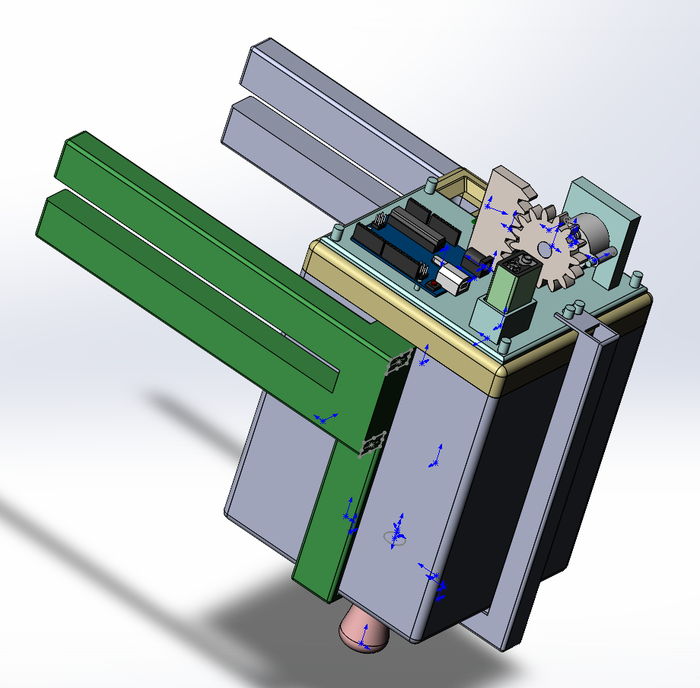
Также к этому времени я уже изменил модель кровати и она стала примерно такой:
1/4
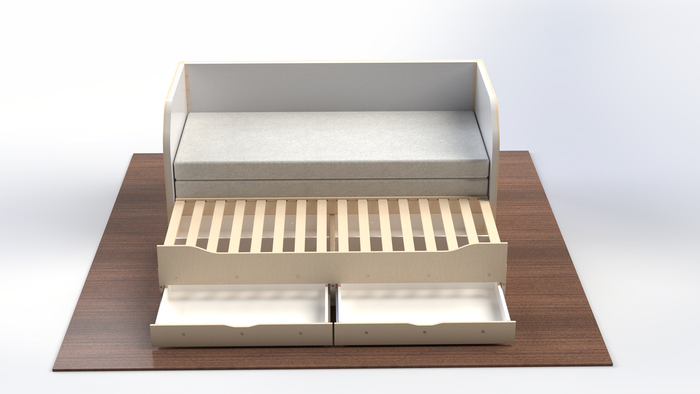
Рендеринг в SolidWorks Visualize, KeyShot пока только изучаю
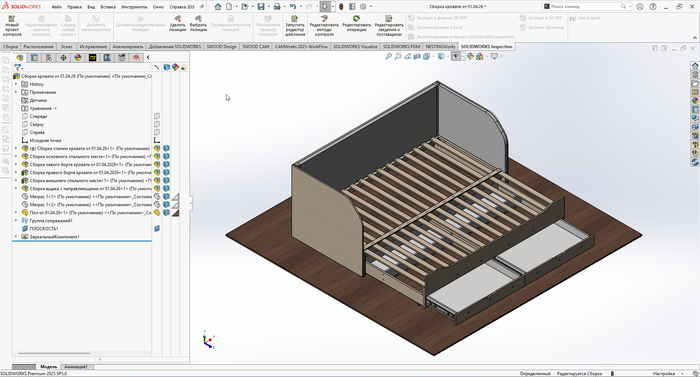
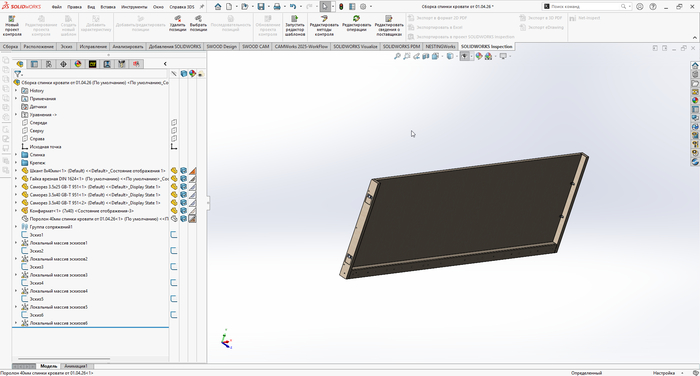
И если ранее я делал все в SolidWorks все в одной сборке, то теперь пошел по умному и делал подсборки и сборки в сборках, так сказать матрешка.
1/6
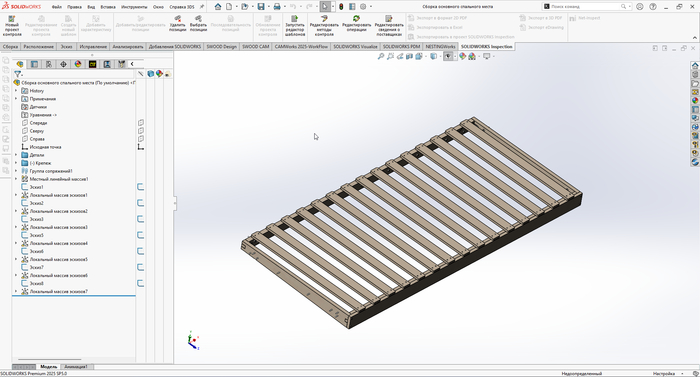
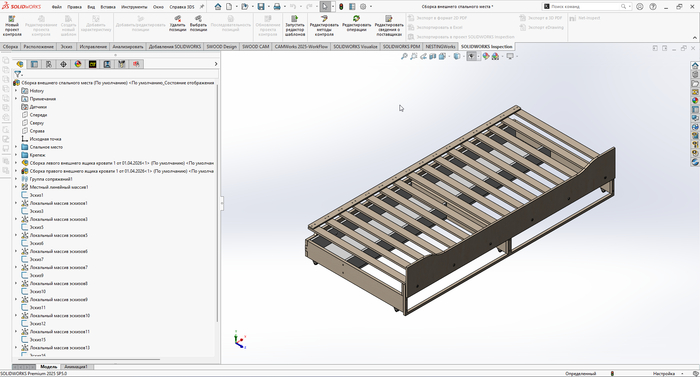
В отличии от первой модели улучшил логику распиловки, чтобы тем же сборщикам было проще собирать, местами усилил элементы кровати, изменил метод крепления боковушек со спинкой, а также увеличил кол-во ламелей, сократив их ширина и тем самым уменьшилась и ширина между ними. Это сделано для того, чтобы ламели лучше амортизировали и те же пружинные блоки не проваливались. Если посмотреть на изначальную версию, то там видно какие огромные пространства между ламелями, что пружинный блок может провалиться, а также кровать в сборе получается как щит и матрас возможно не будет работать должным образом. А, так же добавил еще 2 ящика, которые есть, но они не выдвигаются.
1/5
на последнем фото видно новый метод крепежа, благодаря ему не нужно резать ткань и она не оставляет дурацких зазоров когда кровать в сборе, что видно на фото 4.
Параллельно с этим сделал себе интернет-магазин, но он пока пустой, ибо нечего выкладывать, поэтому не надо считать это рекламой. Моих контактов там тоже пока не указано. Визуальную часть сделал вместе с Gemini, из нескольких вариантов собрали уже полноценный сайт, ну а логику и код уже делал человек. Подключил Bagisto.
1/3
В себестоимость не включал амортизацию станков, аренду помещения, упаковку и работу сотрудников, если нанимать их. Если продавать на маркетах, он сожрет еще 22% как минимум. Налог 6% учтен.
При разработке предпочтение отдавал качеству, долговечности и экологичности. Сократил кол-во используемых толщин фанеры: 10мм, 15мм, 20мм, 25мм, 30мм.
Показав сборку знакомому мебельщику, он выразил мнение что это слишком заморочено, словно боинг собирал, что много где можно пустить просто ЛДСП, а дно ящиков делать из ХДФ 4мм, вместо того же ЛДСП, что люди такое не увидят и не оценят, а собственно какой смысл, когда можно упростить, удешевить и этого опять же не заметят.
В данный момент пока подготавливаю чертежи для Базис мебельщика и собираю заказы, чтобы закупить материал оптом и все изготовить, ибо закупка материала в розницу сильно влияет на конечную себестоимость.
Пытаюсь сделать расчет кондиционирования. На бумаге всё посчитано и даже проверено в живую, но вот нужно подтвердить в программе.
Не могу понять как задать холодопроизводительность. Например теплопоступления в кВт можно задать,а вот с холодом не понятно. Задавал киловаты со знаком минус, но нужно же ещё задать расход воздуха с температурой. И вот задаю расход 0.3 кубометра в секунду с температурой 16 градусов, но тогда программа воспринимает это как поступления воздуха из вне с постоянной температурой. В идеале нужно как то задать циркуляцию через кондиционер с заданной холодопроизводительностью, чтоб он гонял внутренний воздух и охлаждал его.
Если кто знает как это делается прошу откликнуться
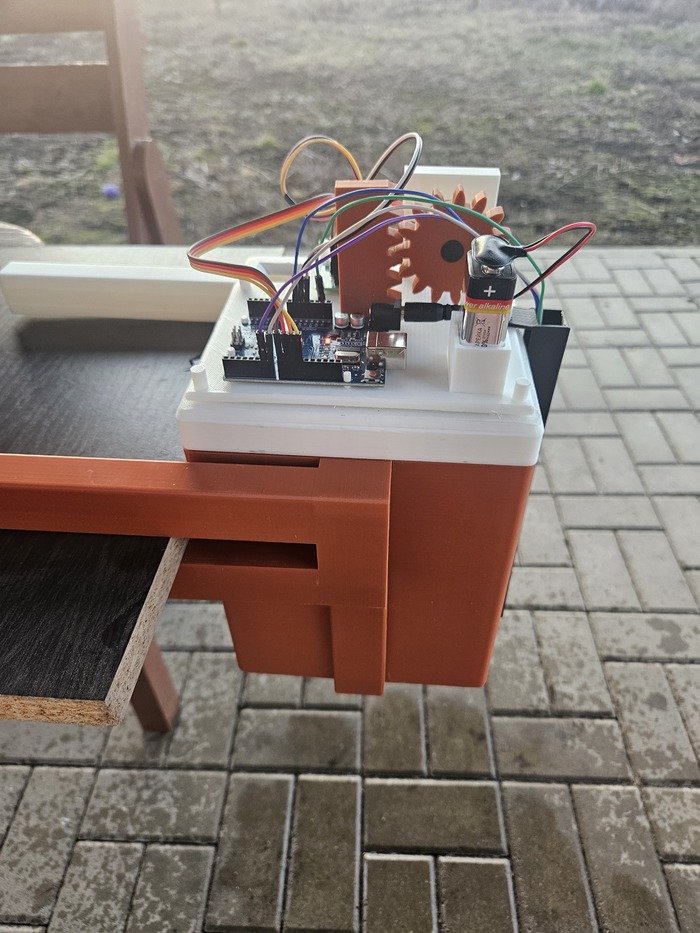
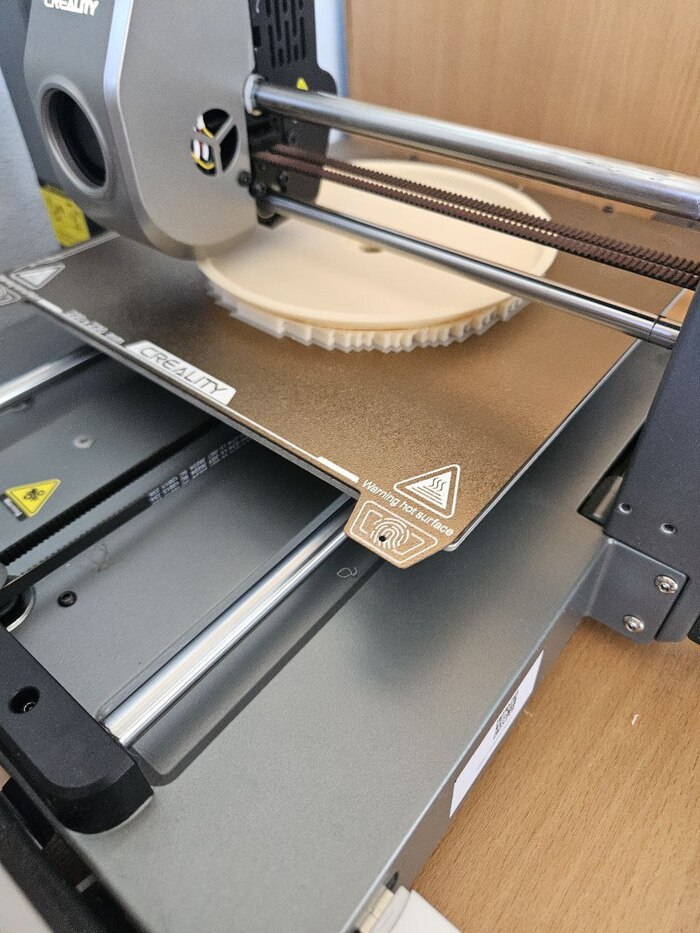
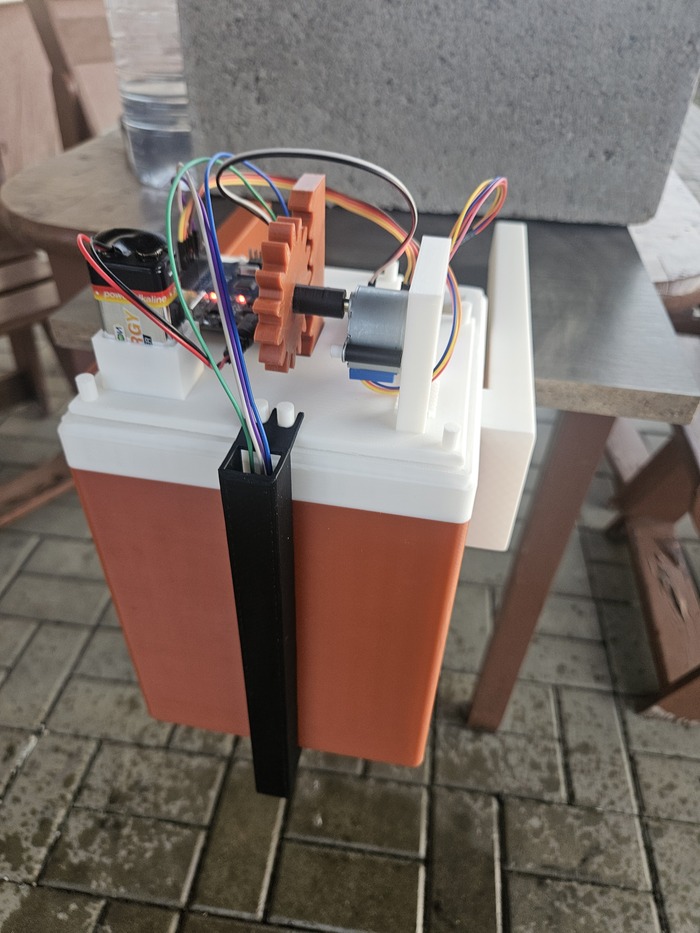
Смеркалось. Рядом со мной стоял откалиброванный 3Д принтер, две катушки свежего PLA-пластика, пять еще не распакованных датчиков с маркетплейса, мультиметр, надфили, кусачки, пол-литра изопропилового спирта и целый комплект Arduino Uno с набором проводов — не считая той мелочи, что оставалась из старых запасов. Всё это было щедро приправлено некоторыми знаниями и относительно прямыми руками. Не хватало идеи.
Помогло отключение воды. Поливая руки из пластиковой бутылки, зажатой подмышками, кряхтя и промахиваясь, я вспомнил летний отдых в доме у бабушки, где не было водопровода по определению. Был умывальник. И это было удобно, за неимением альтернативы.
Решено! Сделаю умывальник. Идею взять цветочный горшок, гвоздь "сотку", кусок пластилина и сделать все быстро была отметена в зародыше. 21 век, все таки! Напечатаю на 3Д принтере.
Если интересно, как, зачем, почему и какие проблемы решил в процессе, то добро пожаловать.
Всю эпопею можно разделить на три четких этапа. Первый - неудачный. Второй - удачный и точка, где, по хорошему надо было бы остановиться. Третий - чистое баловство и развлечение. Зато он самый интересный.
Вариант 1. Эпичный провал.
Буквально в день появления идеи, на коленке, был сделан набросок и пущен на печать. За основу идеи я взял те умывальники, что висели в огороде в моем детстве. Круглая емкость, больше всего похожая на цветочный горшок, сужающаяся к низу. К сожалению чертежей первой версии не сохранилось. Есть только фото готового результата.
1/3
Умывальник версии 1 типа "ведро"
Наиболее полезной и работоспособной частью стал "язык" умывальника и выемка под резиновое уплотнительное кольцо для него. Это, без особых изменений пошло в дальнейшие модификации.
В целом испытания показали - работает. Подтекает немного, но нажимаешь - льется, отпускаешь - не льется. Осталось как - то его прикрепить. Вот тут - то и выявились критические недостатки конструкции. На фото не очень хорошо видно габариты, но в верхней части диаметр сантиметров 16-18. Как это крепить я сразу и не подумал. А надо было!
Наращивать какие - то ушки на верхнем бортике? Слишком узко. Не выдержит веса набранной воды. Да и перепечатывать не хочется. Попытка сделать обруч, который повторяет сужение и по бокам имеет крепежные элементы уперлась в ограничение принтера. Хоть оно и вполне приличное, но имеет пределы. Саму емкость надо держать в верхней части, чтобы центр масс был ниже, иначе перевернется. И так далее. Выходило громоздко, некрасиво и не печаталось одним элементом.
Я конечно попытался что - то изобразить. К сожалению не нашел фотографии. Оно и к лучшему. Мне было бы стыдно это показывать.
Пришлось подумать и пересмотреть концепцию. Во мне проснулся инженер. [А он и не засыпал!]
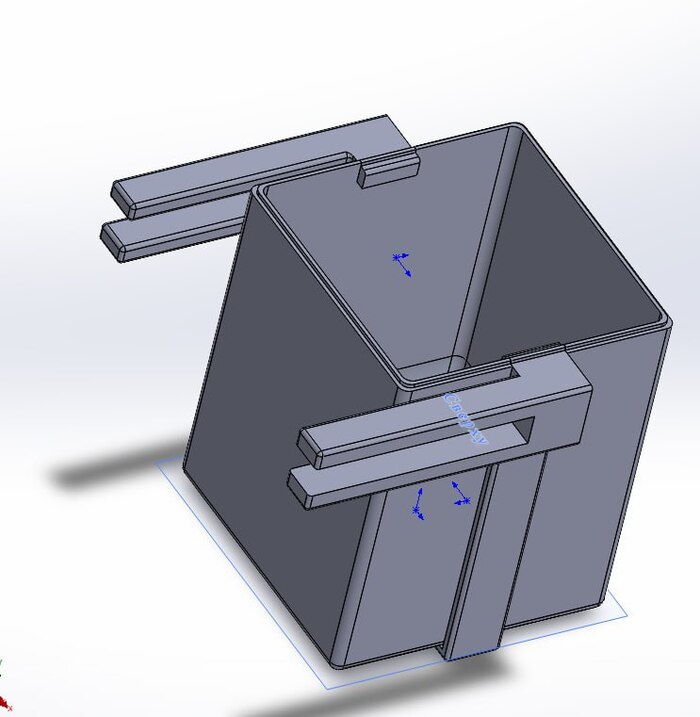
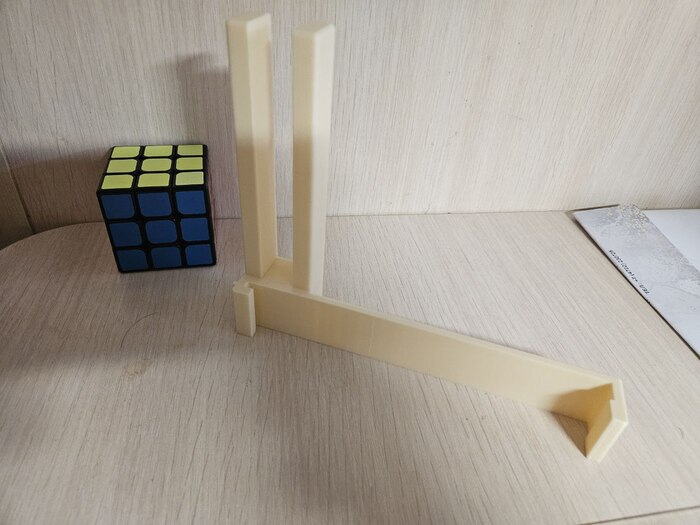
Вариант 2. То, что надо!
К делу подошел более вдумчиво. Если круглая емкость не подошла - пусть будет емкость квадратная. Ее крепить однозначно будет проще. Сразу решил, что крепить буду к шкафчику над раковиной. Ширина доски 16 мм. Вот на нижнюю часть шкафчика и повешу умывальник. Удобно одевать и снимать. Получится достаточно высоко, чтобы можно было без проблем поднести руки и/или посуду.
1/4
Умывальник версии 2. Переработанный.
На рисунках выше видно, что получилось. Из неизменного взято отверстие и язык. Емкость квадратная. Внутри сделаны плавные скаты, чтобы не оставалось лишней воды.
Особое внимание стоит уделить держателям, а именно их способу крепления к емкости. Хотелось проверить - получится ли на PLA пластике, несмотря на его хрупкость, сделать эффект пружинной защелки? В нижней части емкости сделаны пазы в которую предполагается защелкнуть крепление. В верхней части емкости сделано углубление - потай. Крепление как бы одевается сверху, а потом защелкивается.
Опыт показал, что это отличное решение. Одевается с характерным щелчком. Чтобы снять необходимо чем - то острым типа отвертки поддеть снизу. Снимается и не ломается.
В связи с тем, что задача стала уже больше экспериментом, чем решением актуальной проблемы - появилось желание проверить возможность печати различных деталей и общей модульности конструкции. Например, сама емкость печаталась 11 часов, и не хотелось печатать ее снова. Хотелось, переделывать отдельные элементы. Будь - то крышка, держатели, или что - то еще.
Крепление отдельно. Самая интересная деталь, как по мне.
Итог - все работает так, как должно. Почти. Крепится, льется. Выявил три проблемы:
Крепление слишком короткое и хрупкое в том месте, которое одевается на стенку шкафчика. Печатал не думая о прочности. Внутри пористая структура. Итог закономерен. Набрав полную емкость воды (а это литра 2,5 - 3) крепления не выдержали и сломались. Это поправимо сделаем длиннее, толще и уменьшим внутренний воздух.
Нет полной герметичности. После наливания воды постоянно капает. Причиной этому стала ошибка в глубине выемки под уплотнительную резинку. Буквально на 1 миллиметр глубже, чем следовало. Но перепечатывать емкость и тратить снова 11 часов на это очень не хотелось. Ниже будет описано, как постарался исправить ситуацию.
Чего - то не хватает. Нет полного удовольствия от процесса. Сам по себе этот умывальник больше игрушка. Так - что доведем игрушку до логического конца. Сделаем его автоматизированным устройством, чтобы он автоматически открывался, когда подносишь руки и закрывался, когда убираешь.
Вариант 3. Лучшее враг хорошего!
Мне кажется это самая интересная часть повествования. Для автоматизации надо было найти ответы на следующие вопросы:
Как преобразовать вращательное движение (двигатель) в поступательное?
Какой двигатель выбрать?
Какой подобрать датчик, чтобы он удовлетворял требованиям по точности и скорости срабатывания.
Как скомпоновать и закрепить все на устройстве?
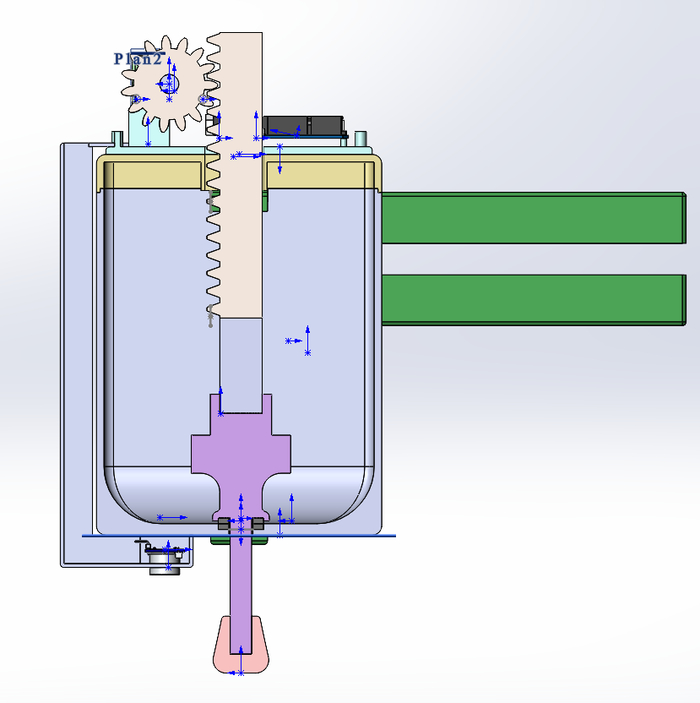
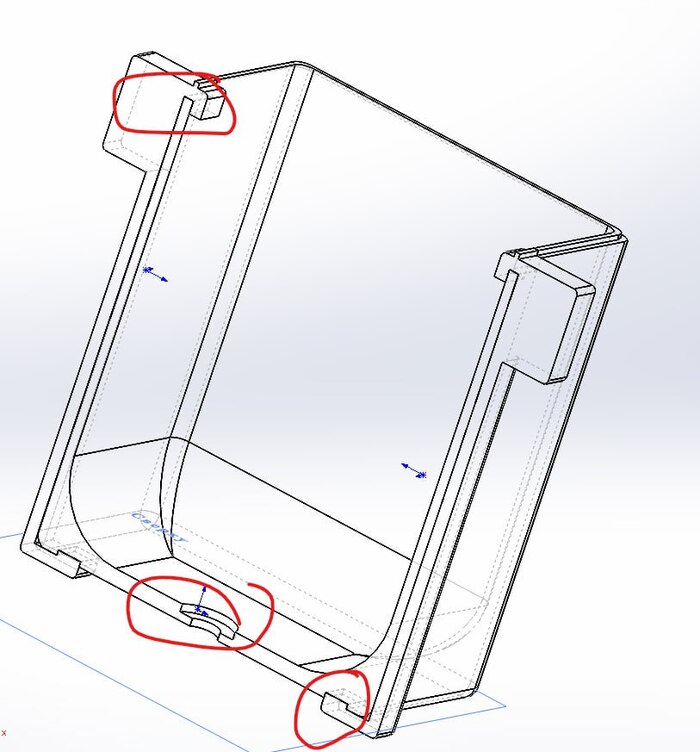
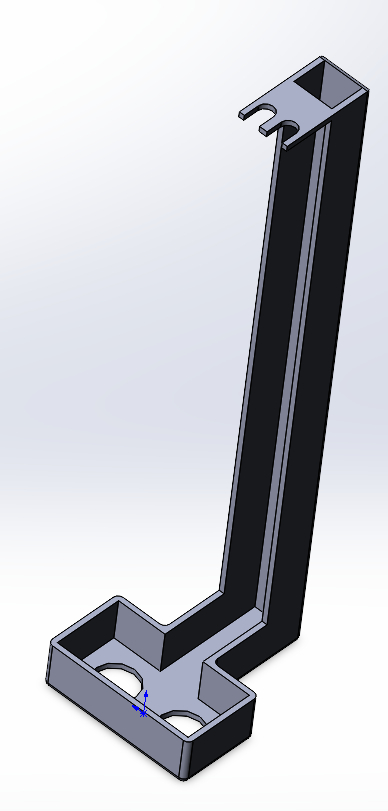
Изначально хотел сделать какой - то вариант кривошипно - шатунного, или кривошипно - ползунного механизма. Можно, но зачем? Остановился на варианте звезда - рейка. Дешево и сердито. Чтобы открыть/закрыть требуется минимум оборотов. Об износе и речи не идет. Если все сделать точно - будет работать как надо.
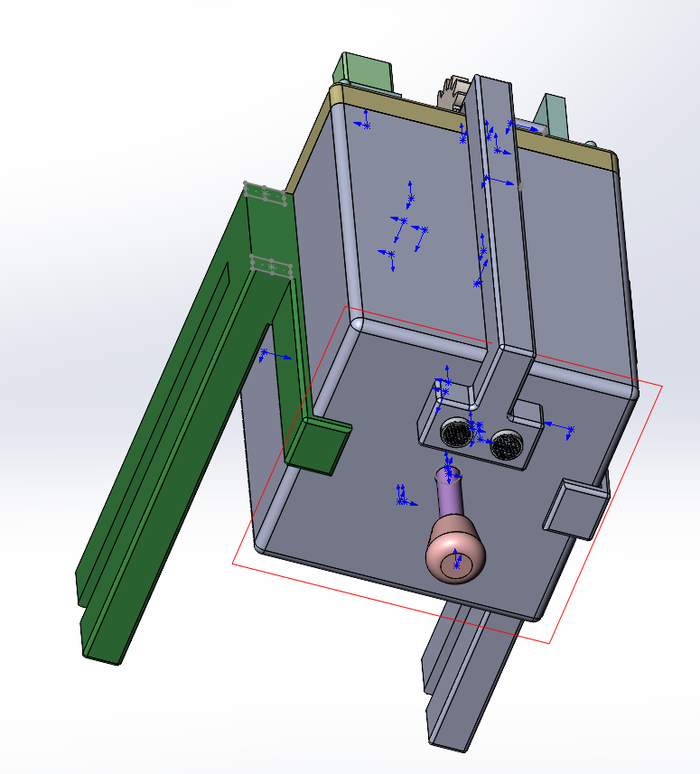
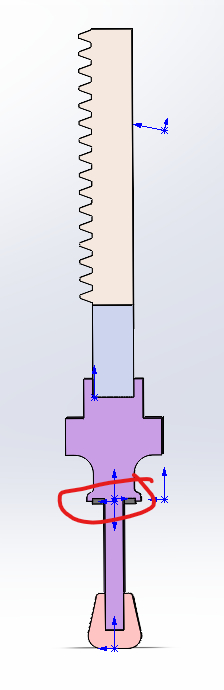
1/2
Язык умывальника в сборе
На рисунке выше сборка из четырех деталей. Рейки с удлинением, чтобы ее длины хватало выглядывать из крышки и цепляться с зубчатым колесом. Самого языка, его насадки для удобства нажатия и уплотнительной резинки.
Выше я писал, что промахнулся с углублением в емкости. Из - за этого не было достаточной герметичности. Решил проблему так, чтобы резинка закрывалась другой резинкой. И эта резинка выпирала ровно на тот самый миллиметр наружу, компенсируя ошибку в емкости. На второй картинке я обвел это место. Сам язык сделал тяжелым, чтобы не всплывал и центр тяжести опустил как можно ниже, чтобы повысить устойчивость. Для этого и предусмотрен массивный прямоугольник. Помогло.
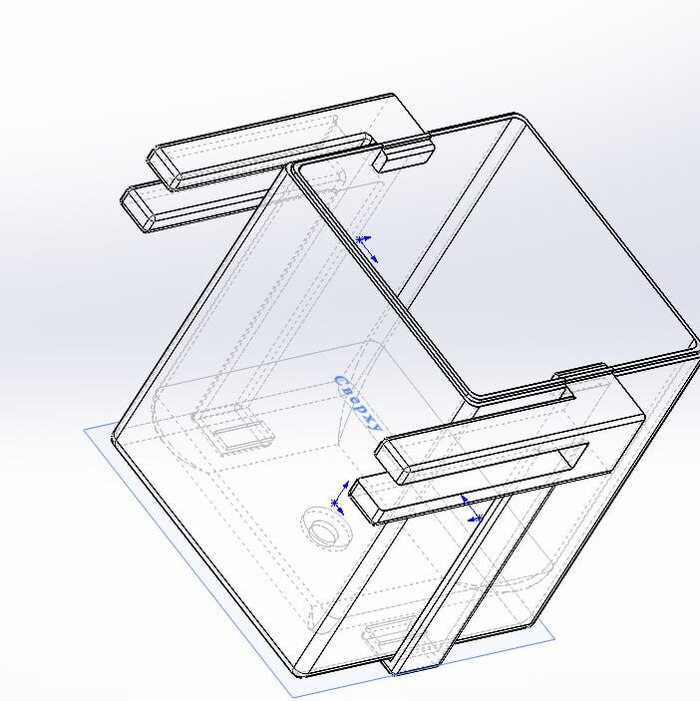
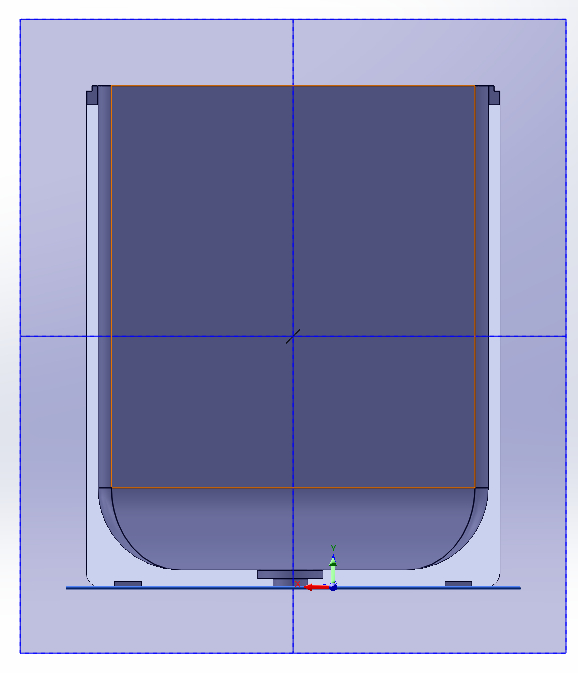
Следующим шагом создал крышку на умывальник в котором предусмотрел отверстия для налива воды и выхода рейки. Отлично подошло решение с потаем бокового крепления, когда оно, крепление, надетое на емкость, становится продолжением бортика. Крышка надевается сверху плотно без зазоров.
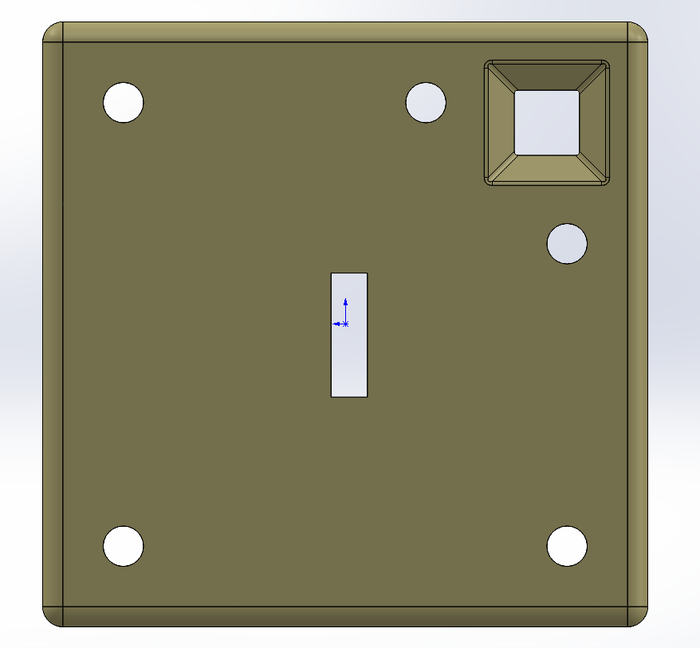
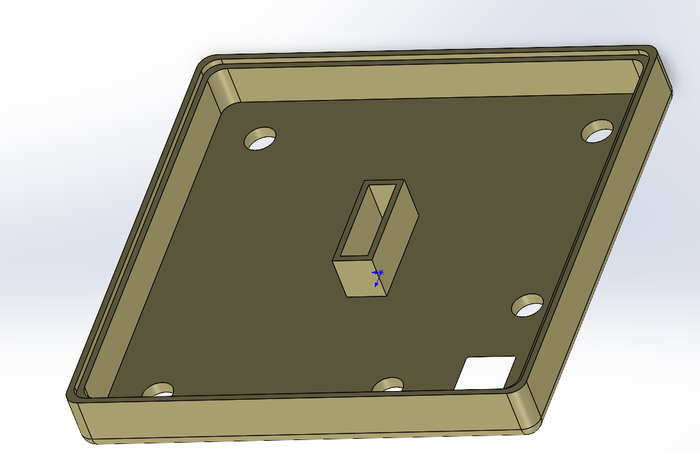
1/2
Крышка
Странные отверстия на крышке - это крепления под накладку, на которой, по моей задумке, будут крепиться основные компоненты. Изначально я хотел сделать крепления по принципу защелки, но все эксперименты показали, что PLA слишком хрупок для этого и ломается. Удивительно, что сработали защелки на держателе (см. выше). Думаю потому, что подобрал удачное сочетание толщины пластика и длины рычага. А эти защелки получались слишком мелкими и, потому, хрупкими. Решил, что крепиться будет по принципу кубика конструктора шип - паз. Идея прекрасно сработала. Накладка одевается туго. Намертво.
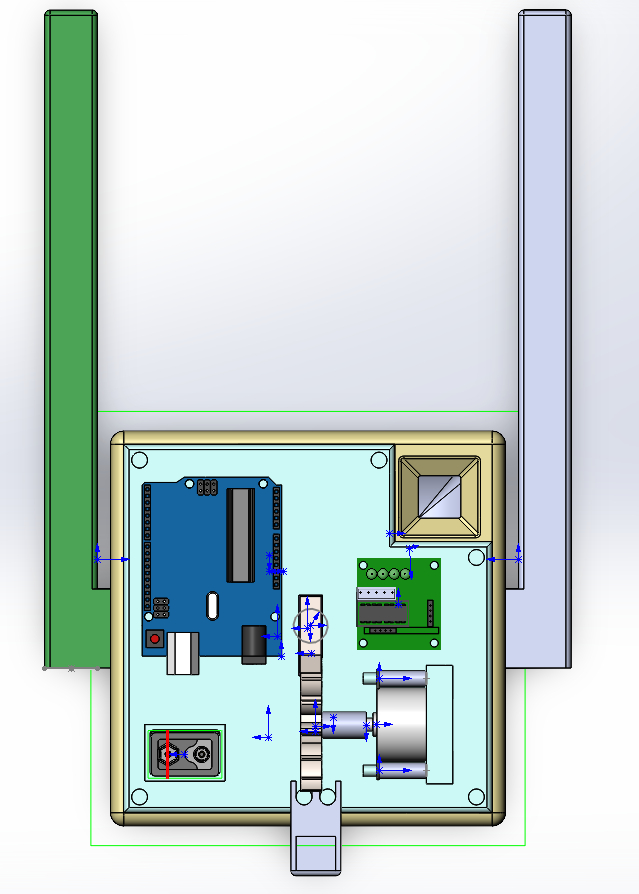
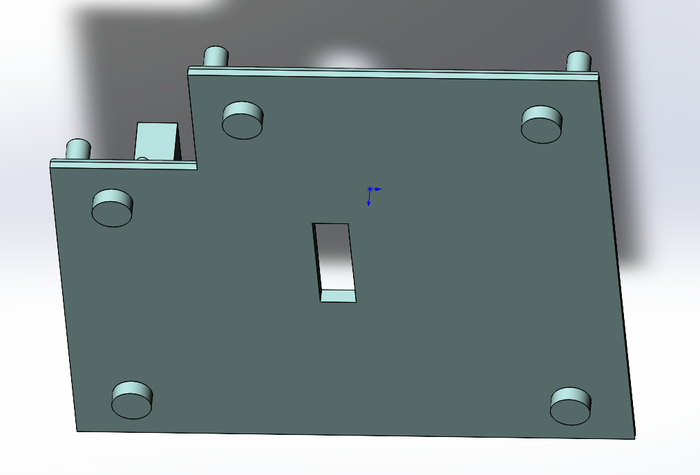
Осталось дело за малым. Спроектировать накладку так, чтобы удачно скомпоновать все элементы, а именно:
Двигатель и звезда
Батарейка
Драйвер двигателя
Плата ардуино
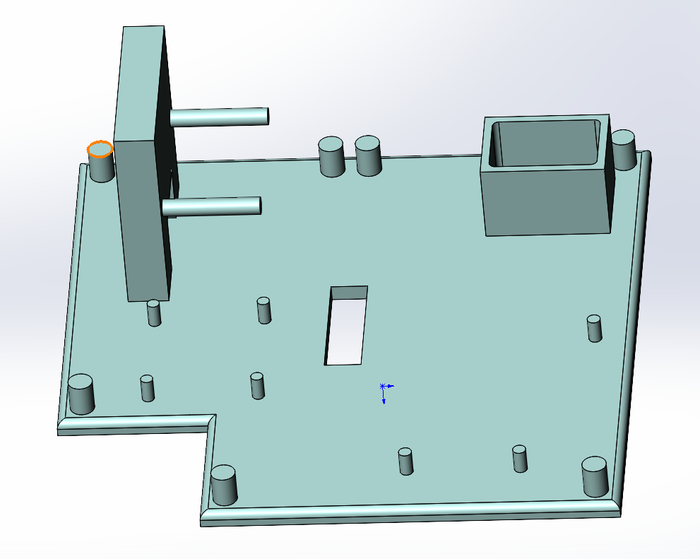
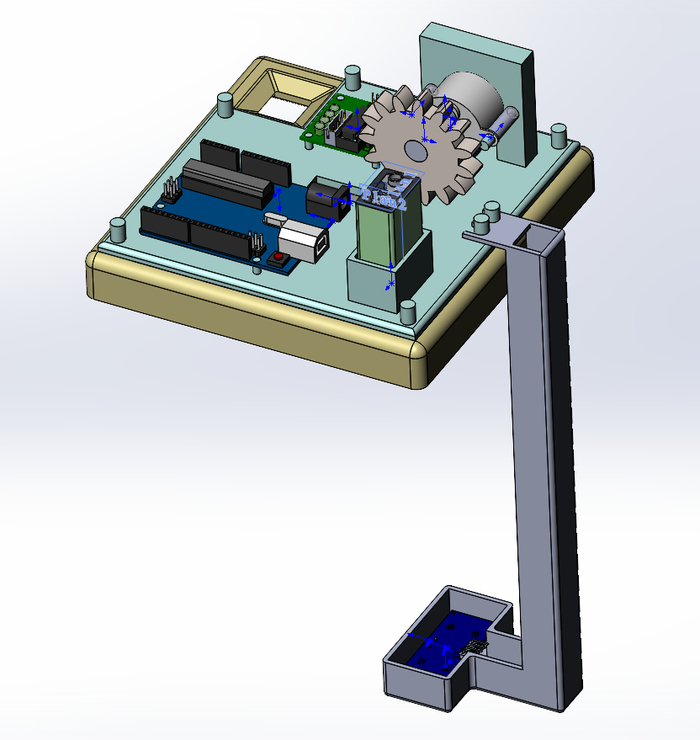
1/3
Накладка для крепления плат и двигателя
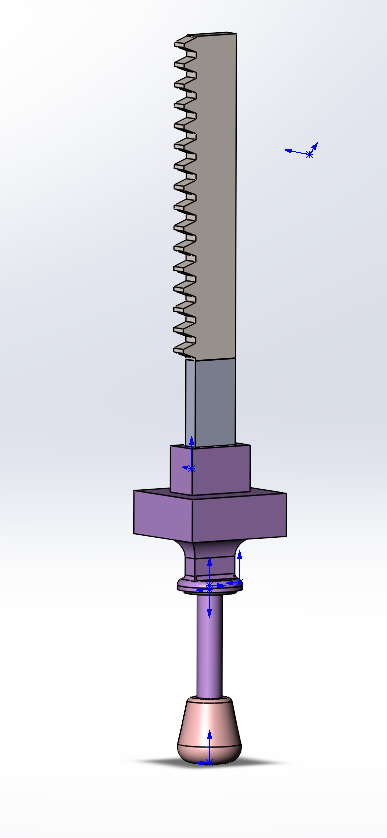
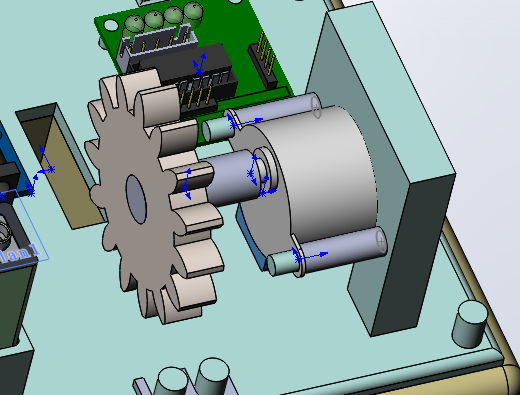
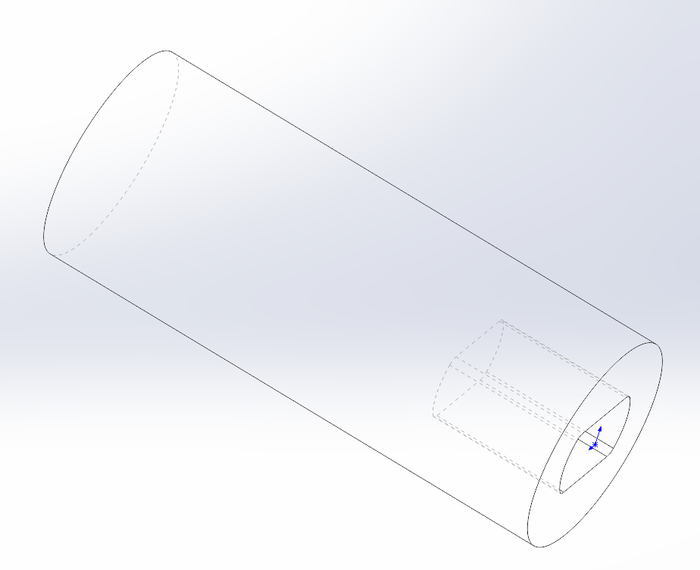
В качестве двигателя решил взять шаговый двигатель. Т.к., как писал выше, много оборотов не требуется. Скорость не требуется. Важна точность. Шаговый двигатель самый подходящий вариант. В комплекте с набором ардуино шел двигатель 28byj-48 и плата драйвера. Это удобно. Не надо вникать в детали управления шагового двигателя. Подавай импульсы на выходы платы по порядку и он будет крутиться.
Двигатель имеет определенные габариты и должен быть установлен точно так, чтобы звезда идеально заходила на рейку. Для этого использовал достаточно длинные крепления, чтобы двигатель сидел на них очень плотно, а требуемое расстояние задал с помощью трубочек определенной длины. Вал двигателя соединил со звездой муфтой, в которой сделал отверстие для двигателя характерной формы. Внешний диаметр муфты совпадает с диаметром крепления звездочки. Все село плотно.
1/2
Крепление контроллера и батарейки нет смысла обсуждать отдельно. Ничего интересного.
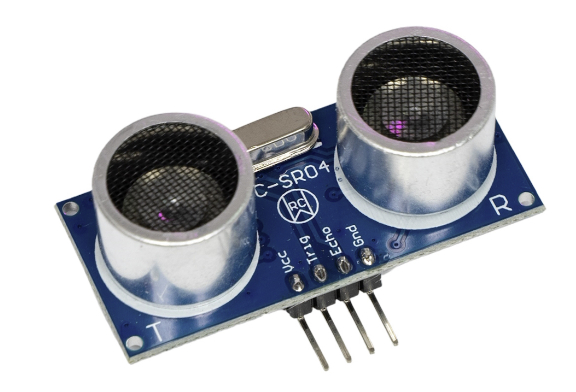
Гораздо интереснее оказалось с выбором датчика. Изначально задумывалось использовать инфракрасный датчик HC-SR505. Он срабатывает именно на человека. Должен работать хорошо.
HC-SR505
На практике оказалось все иначе. Для моего случая у датчика был запредельный диапазон срабатывания, а что самое важное, крайне медленное время реагирования. По факту, даже накрыв датчик плотной тканью он узнавал об этом спустя 30 - 40 секунд. Датчик отлично подойдет для систем освещения типа лампочек в подъездах (для этого он и сделан), но в моем случае не годится. Думал применить его старших братьев с регулировкой скорости и расстояния, но остановился на ультразвуковом датчике hc-sr04. Расстояние срабатывания от 2 см до 4 м и скорость отклика до 38 мс.
Скорость отклика записывают в его недостатки, но для меня это фактически сверхсветовая. С гарантией. В программе мы опрашиваем его раз в пол секунды.
HC-SR04
Надо бы его закрепить так. чтобы руки точно попадали под его излучение. Тут все просто - смотри картинку. Важно сделать желобок, чтобы не мешали провода и прижать все так, чтобы не попала вода.
Детали напечатаны, собраны. Дело за программным обеспечением. Не стал жестить и вспоминать ассемблер под контроллеры ATMega. Решил пусть будет C++. Программа простая. Ресурсов хватит точно. Поставил Arduino IDE, надергал скетчей из интернета по работе с двигателем и датчиком и собрал все в удобное для себя решение. Где брал основу для своего класса по работе с двигателем уже не вспомню. А вот по датчику помню.
Основной код программы:
#include "u_driver.h"
#define echoPin 6
#define trigPin 7
#define in1 8
#define in2 9
#define in3 10
#define in4 11
U_Driver *drvr;
int isOpen; //-1 подготовка, 0 закрыто, 1 открыто
const int thresold = 11; //Пороговое значение срабатывания (открытия/закрытия) в см
void setup() {
//Пины привода
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
//Пины датчика
pinMode(trigPin, OUTPUT); // назначаем trigPin, как выход
pinMode(echoPin, INPUT); // назначаем echoPin, как вход
Serial.begin(9600);
drvr = new U_Driver(10,90);
isOpen = -1;
Serial.println("START PROGRAM");
}
void loop() {
if (isOpen == -1){
delay(1000);
//Убираем первое ложное срабатывание
isOpen = 0;
}
else {
Serial.println("MAIN LOOP START");
int duration, cm; // назначаем переменную "cm" и "duration" для показаний датчика
digitalWrite(trigPin, LOW); // изначально датчик не посылает сигнал
delayMicroseconds(2); // ставим задержку в 2 ммикросекунд
digitalWrite(trigPin, HIGH); // посылаем сигнал
delayMicroseconds(10); // ставим задержку в 10 микросекунд
cm = duration / 58; // вычисляем расстояние в сантиметрах
Serial.print(cm); // выводим расстояние в сантиметрах
Serial.println(" cm");
Serial.print("IsOpen:");
Serial.println(isOpen);
if (cm <= thresold && isOpen == 0)
{
Serial.print("NEED OPEN");
//Если поднесли руки в зону срабатывания датчика и закрыто
drvr->Open();
isOpen = 1;
}
if (cm > thresold && isOpen == 1){
Serial.print("NEED CLOSE");
//Было открыто, но убрали руки.
drvr->Close();
isOpen=0;
}
}
delay(500); // ставим паузу в 0,5 секунд
}
По коду и комментировать - то нечего. Кроме того, что я немножко получил удовольствие вспомнив С++. Убедился, что современные языки стали гораздо удобнее тот - же С#. Не удержался от соблазна немного поиграть в ООП и спрятал логику работы с двигателем в отдельный класс. Думаю, что не стоит тут это расписывать. В конце статьи будет ссылка на материалы в т.ч. и на код. Кому интересно посмотрит самостоятельно.
Изначально я планировал закрывать язык в самом начале работы программы. Чтобы избежать состояния, когда язык поднят, а питание убрано. Это было лишнее. Точнее как. Это было бы правильно сделать, по науке, но для этого надо было усложнить схему. Как - то определять вращается ли двигатель. Просто вращать - оказалось плохой идеей. Мощности двигателя хватало, чтобы приподнять крышку.
Но, к моему удивлению, убрав блок инициализации, я столкнулся с тем, что при включении устройства в сеть (не ресет, а именно подача питания) было ложное срабатывание датчика на открытие. Склоняюсь к тому, что идет процесс инициализации самой микросхемы. Копать глубже не стал. Поступил, как настоящий ИТшник. Сделал костыль. Вернул этап подготовки, но при этом не стал вращать двигатель, а подождал одну секунду. Это убрало ложные срабатывания. Может кому - то будет полезно.
Костыль, конечно, но, надо держать марку. Как - же без костылей - то?
Итог
Рендеринг, это хорошо, но, уверен, что хочется посмотреть, как получилось в итоге.
Не уверен, что кому - то надо, но STL файлы и код для ардуино можно скачать по этой ссылке
Выводы
Лично я получил большое удовольствие от процесса. Времени потрачено очень много. Пластика, с учетом брака и экспериментов - три катушки по 1 кг каждая.
Значительно повысил навык работы в CAD программе.
Методом проб и ошибок понял пределы допустимого в использовании 3Д принтера для своих целей. Что работает, что нет. Захотелось попробовать иные пластики, более сложные конструкции и так далее.
В планах сделать какой ни будь мини проект, чтобы:
- Интегрировать ПК (ноут, или рапсбери) с ардуино, а может какой другой линейкой контроллеров. Ардуино самый доступный. Без интеграции с ПК дальше мелких поделок продвинуться не удастся. То, что это у меня получится гарантия 100% тут нет сомнений, но сам путь все равно надо пройти и набить руку.
- Поиграться с тем, чтобы один контроллер мог управлять другими контроллерами. Теми же приводами могут управлять и более простые контроллеры, а некую логику реализовывать более мощные, а им управлять программы на ПК и т.д.
У меня есть пару идей, куда бы применить свое внезапно появившееся хобби, но может быть в комментариях кто - то еще подскажет дельные советы? Буду благодарен. Жду отзывов. Панамку приготовил.
Кто осилил текст - тем большое спасибо за внимание!
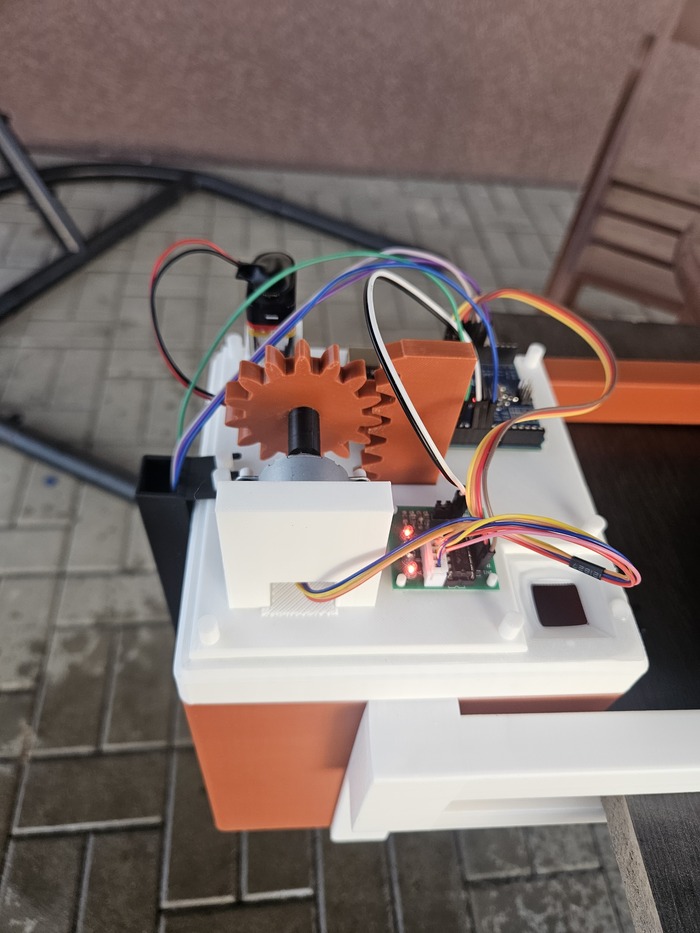
То есть, конечно же нагенерил еще контента. Разобрал, поснимал, собрал, попутно порешал мелкие проблемки типа наводок в видеосигнал по питанию. В итоге у меня теперь есть полный набор материалов, который я могу пересобирать и подсовывать аудитории еще долго! Но пока собрал аля рекламный видос на минуту с хвостиком из всего что появилось свеженького. Монтажер я, как и оператор, умеренных талантов, это не более чем хобби, так что вышло как вышло. Я старался и я доволен. Тут и красота, и процесс сборки, всё такое:
Всё еще вялотекуще думаю про монетизацию, разные площадки, всё такое. Шлем пока не продал.
И казалось бы да, но нет же! Покой нам только снится. Я заказал новых запчастей с алишки, ни за что не догадаетесь зачем. В списке: новые камеры, с разрешухой вдвое выше новые экранчики, с картинкой вдвое лучше могучие ИК-диоды диапазона 900+ нм элементы пельтье микрофоны, усилители, hdmi-модули датчики, моторчики, вентиляторы, светодиодики и прочая мелочевка - без счёту В итоге мне явно понадобится батарейка от тепловоза, чтобы всё это кормить, а лучше - очень длинный удлинитель для удлинения длины.
У меня даже есть новый дизайн, но я вам его не покажу.
В общем, если задумка моя по женитьбе всего, что я напридумывал, удастся - буду доволен. Ну а если нет, то как минимум поделюсь неудачами и шишками. В любом случае, я сильно прокачал свой скилл и в солиде, и в рукоделии, и в котопугании - а это уже немало, даже если все эти затеи так и останутся баловством.
Такие вот дела. Оставайтесь на линии, по мере сборки более вменяемых видосов сборки (каламбур, вау) буду выкладывать.
Кстати, присоединяйтесь к моему телеграм-каналу... Нет )
Возникла рабочая необходимость преобразования вращательного движения в поступательное для механизма запирания двери уличной кассы самообслуживания (требуется усилие прижатия двери к резиновому уплотнителю).
Зубчатые колёса, их оси и рейка вырезаны лазером из х/к листа толщиной 2 мм. Корпус собран из листа 1,0 и 1,5 мм. Зазоры между трущимися деталями - 0,2 мм.
Результат приемлемый для прототипа. При необходимости можно доработать конструкцию, оптимизировав зазоры и передаточное число.
@ubersosiska, Так ты начинку от окулуса в него вставь, вот, кстати, вообще идея тебе: купи несколько б/у вторых окулусов, разбери, достань начинку (мозги, оптику, камеры), собери всё в такие шлемы и продай на и-бэе, сделав презенташку с красивым рекламным видосиком, ценник можешь смело ставить x3 или x3,5 к себестоимости, выкупят в тот же день, потом ещё штук десять сделаешь и продашь по той же схеме, буржуи кастомы очень любят и готовы безумные деньги за них отдавать.
Молочные продукты с Белоруссии кушать нельзя. Белоруссия является лобистом завоза пальмы на территорию ЕАЭС, именно Белоруссия выступила против ограничений на ввоз пальмового масла на территорию ЕАЭС. https://life.ru/p/1335807?ysclid=mkvefr4nlp497216935