Вышла новая модель для автономного вождения Alpamayo-R1
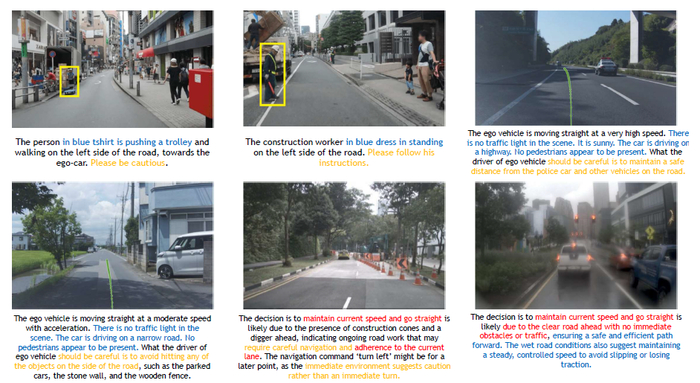
Созданная модель Alpamayo-R1 (https://huggingface.co/nvidia/Alpamayo-R1-10B), получившая после презентации на CES 2026 официальное название Alpamayo 1, нужна для автономного вождения, объединяя логические рассуждения с планированием траектории. Для её обучения был использован набор данных CoC, который содержит в себе причинно-следственные объяснения действий водителя, созданные автоматически и с участием человека.
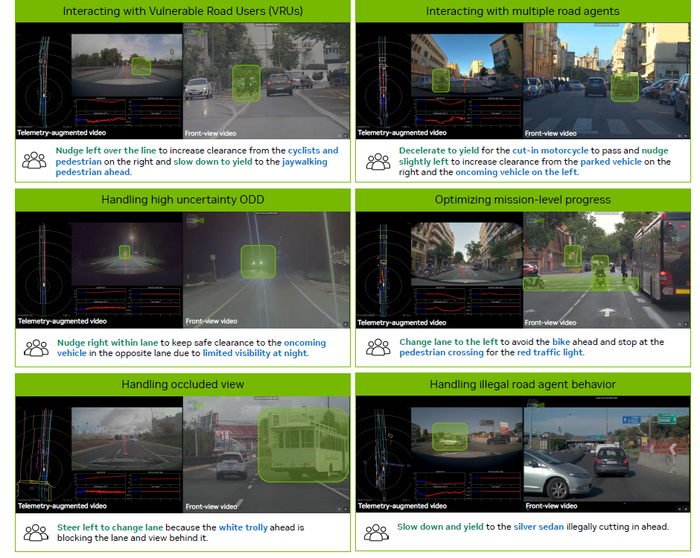
Задействованная архитектура VLA принимает на вход данные с четырех камер (фронтальной широкоугольной, телеобъектива и двух боковых) с историей в 0.4 секунды и основана на языковой модели Cosmos-Reason для рассуждений и диффузионном декодере для построения траекторий в реальном времени. Обучение модели началось с тонкой настройки на данных CoC, а потом применили обучение с подкреплением для согласованности рассуждений и действий.
В результате точность планирования на наборе данных PhysicalAI-AV выросла на 12% в сложных сценариях, количество опасных сближений в симуляции снизилось на 35%, а метод обучения с подкреплением улучшил качество рассуждений на 45%. При этом итоговая модель на 10B параметров работает на реальном автомобиле с задержкой 99 мс.