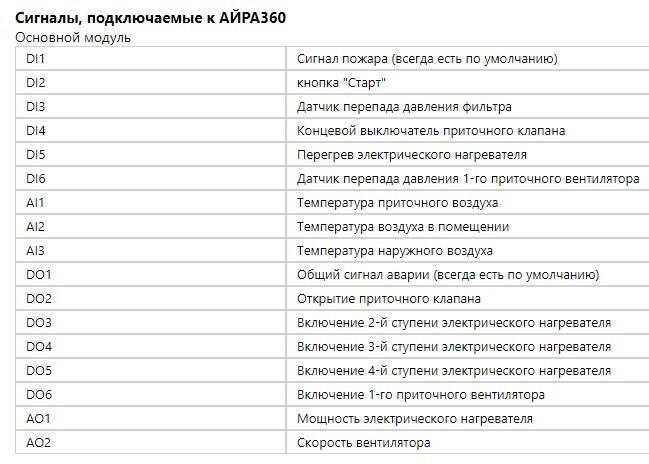


20 сожжённых двигателей спустя: автоматизация, которая пережила электромагнитный апокалипсис
В этом посте: шторм, искрящие трансформаторы, перепутанные фазы резервных линий электроснабжения и генераторов, а в прошлом посте я рассказывал

в тот самый момент, когда поняли (на самом деле это был долгий и по большей части безрадостный момент): готовые контроллеры не вывозят наши промышленные условия, готовые алгоритмы "деревянные" и не гнутся под технологию процессов. Тот пост неожиданно для нас попал в горячее, собрал много комментариев и вопросов из ответов на которые и собран этот пост.
Но сначала коротко о том, кто мы и зачем всё это затеяли.
Мы не про «импортозамещение», мы про «своё и лучше»

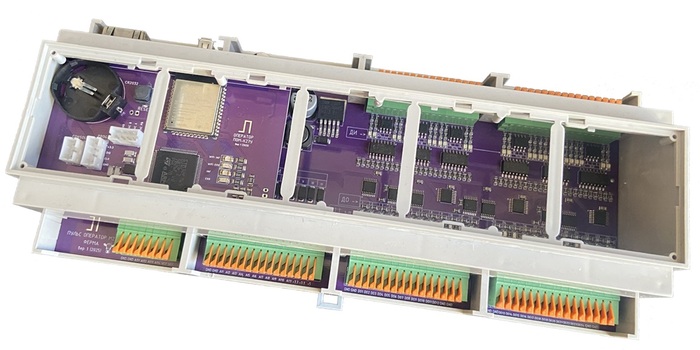
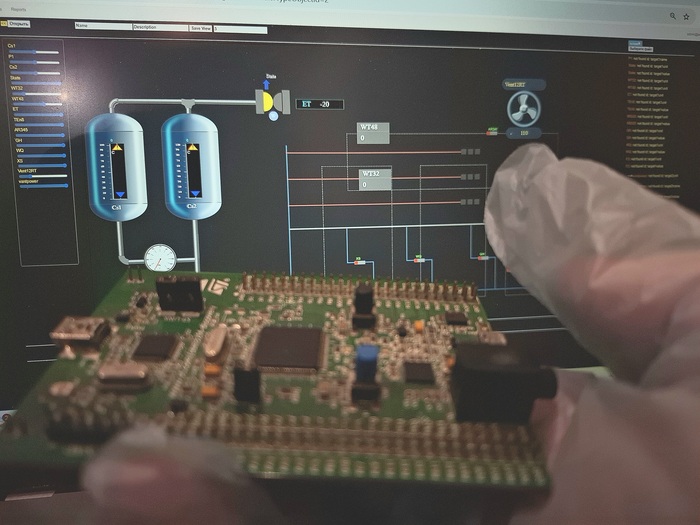
Инкрустированная "камнями" поверхность. Одна из плат расширения к контроллеру.
Мы не копировали западные образцы. Мы с ними работали и думали: "Что нам не нравится в существующих решениях? Что ломается в поле, о чём молчат производители и чего не хватает?"
И вот что мы насобирали за годы работы на реальных фермах.
1. Ограничения сред разработки. Даже в самых продвинутых универсальных средах есть жёсткие ограничения, не позволяющие полноценно реализовать сложные алгоритмы.
2. Энкодер и модули ввода-вывода. На длинных линиях при управлении пусковыми аппаратами возникают импульсы. Модули ввода-вывода, в том числе те, что должны принимать сигналы с энкодера, от этих помех сходят с ума. Или не видят сигналы с датчиков. В результате - потеря позиции, хаос, остановки, убытки.
3. Сбои. Система требует ручного перезапуска, еще хуже если настройки не сохраняются или требуется перепрошивка, а до неё ещё добежать надо. Это часы простоя, особенно ночью.
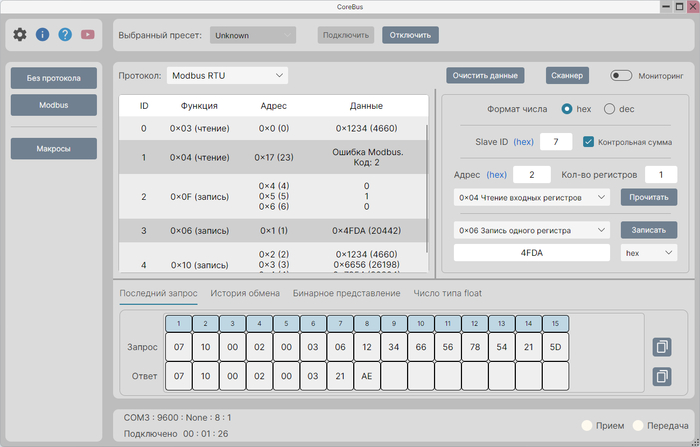
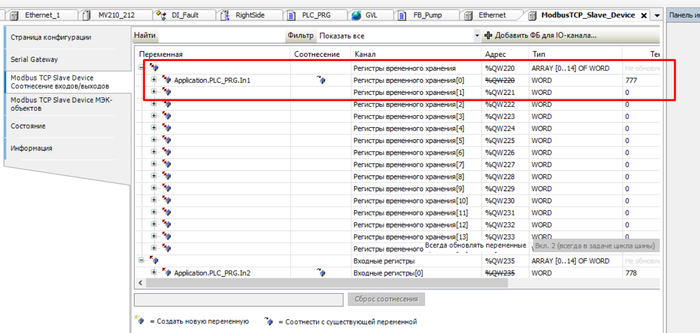
4. Закрытые протоколы. Никакой интеграции с другими системами, всё зашито намертво. Вы не можете забрать данные.
5. Разрозненность мировых решений. Существуют отличные алгоритмы - решения мировых лидеров. Но они разрозненны: одна система - для навозоудаления, другая - для микроклимата (и это отдельно шторы, отдельно вентиляторы, отдельно орошение, приточка), третья и четвертая - для КНС и Сепарации, пятая - для дезинфекции доильных аппаратов.
Все от разных производителей, с закрытыми протоколами. Между собой не связаны. Не позволяют синхронизировать процессы. И их сложно, а чаще невозможно дополнить, оптимизировать или адаптировать под реконфигурацию исполнительного оборудования.
6. Отсутствие удобного человеко-машинного интерфейса. У большинства решений:
нет веб-интерфейса, где можно было бы посмотреть состояние системы, изменить уставки или перенастроить логику прямо с телефона или ноутбука;
панель оператора, если она есть - недружелюбная, с архаичным меню и/или кривым переводом, которую, к тому же, еще и отдельно надо программировать;
а если и есть ПО для ПК - оно проприетарное, требует установки, весит гигабайты, не работает без "родного" программатора.. и на немецком.
В результате любое изменение в системе — это вызов инженера или программиста, поиск программатора, установка софта и потеря времени. Вместо того чтобы открыть браузер, зайти в настройки и за пару кликов изменить параметры или тут же через встроенный Wi-Fi обновить прошивку, вы тратите часы на поиск нужного кабеля, совместимой версии ПО и человека, который умеет с этим работать и, по опыту, ему ехать до фермы километров 300.
А есть и «альтернативы»:
Мировые лидеры — калибровка выполняется по току, упором в ограничитель. Скрепер просто упирается, ток резко растёт — и система запоминает эту точку как конечную. После 4-5 таких калибровок редуктор ломается или станцию вырывает из креплений.
Потому что при первых запусках, в период приработки ответных плоскостей механизмов к свежему бетонному полу навозных аллей, упор происходит с полным усилием двигателя.
Другие "альтернативы" - вообще без энкодера. Вся логика защиты завязана на одном единственном параметре - токе двигателя. Превысил - значит, препятствие. А если датчик тока вышел из строя или дал ложный сигнал? Или настроили большой ток, чтобы не отвлекаться лишний раз на штатные инциденты? Всё...

...но рано делать поспешные выводы
Мы сделали свой контроллер не чтобы "заменить", а чтобы решить эти проблемы раз и навсегда.
Мы собрали в одном устройстве все технические и программные функции, которые предлагают западные лидеры для каждой подсистемы (навоз, климат и т.д.) - плюс дополнительный функционал, которого у них нет. Добавили техническую устойчивость к нашим реалиям: гальваническую развязку, широкий диапазон питания, аппаратную самодиагностику, энергонезависимую память с ресурсом 14 триллионов циклов перезаписи и гибкое программное обеспечение.
Как мы чуть не поседели во время локального апокалипсиса
Самая стробоскопическая история, которая лучше любых цифр доказывает, что мы не зря старались.
Однажды летом на одной из площадок в 70 гектаров (к слову, стоимостью более 30 млрд. рбл.) случился электромагнитный ад: штормовой ветер, ливень, проблемы на линии 10 кВ. Трансформаторы заискрили, включились резервные дизель-генераторы, у некоторых оказалась перепутана очередность фаз - случилось все и сразу!
Что произошло с "чужими" контроллерами? Они дружно ушли в защиту и ждали перезапуска. Инженеры под дождём бегали бодрить системы водоподготовки, тепловые пункты, вентиляцию, попутно пробегая мимо наших систем.
А мы - те, кто еще недавно жег оборудование заказчика направо и налево бегали вместе с ними. И когда всё успокоилось, к нашему общему, с заказчиком, изумлению - 100% наших систем отработали штатно. Без ручного перезапуска. Без нашего вмешательства.

Примерно так мы выглядели, когда поняли, что всё работает
Наши "Операторы" - просто пережили всё. Те, что управляли скреперами, заметили, что двигатель крутится не в ту сторону (очередность фаз), и самостоятельно реверсировали контакторы. Там, где сработали тепловые реле (отсутствие одной из фаз), контроллер зафиксировал инцидент и терпеливо ждал сброса, там, где питание пропадало и появлялось – продолжалась работа, не потеряв ни позиции энкодера, ни текущего шага техпроцесса.
Что под капотом
Что внутри и чем это отличается от того, что есть на рынке.
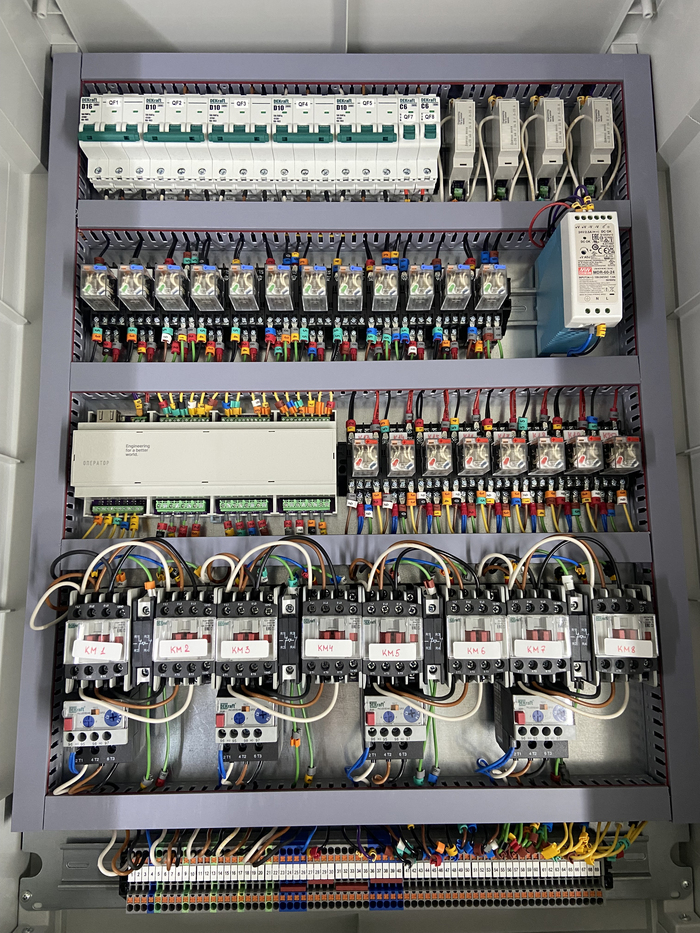
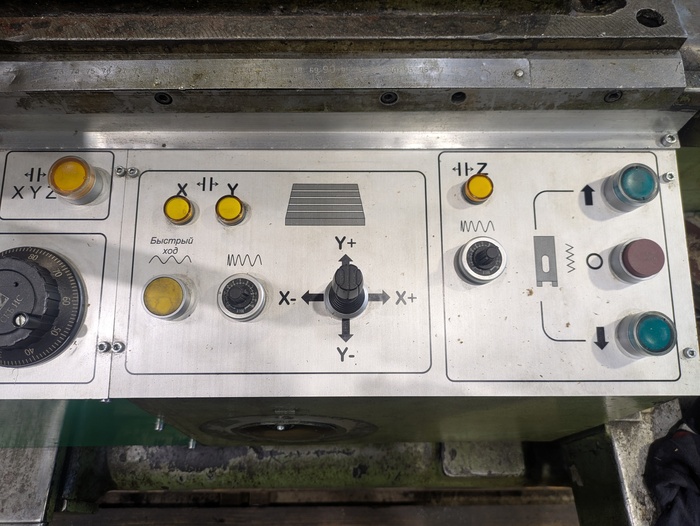
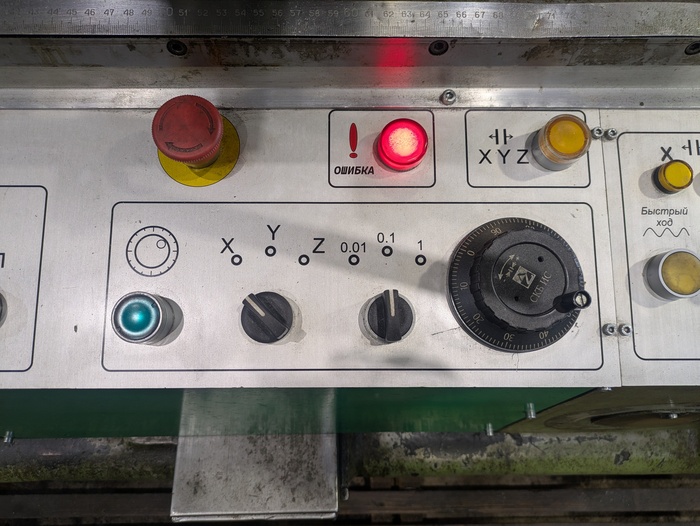
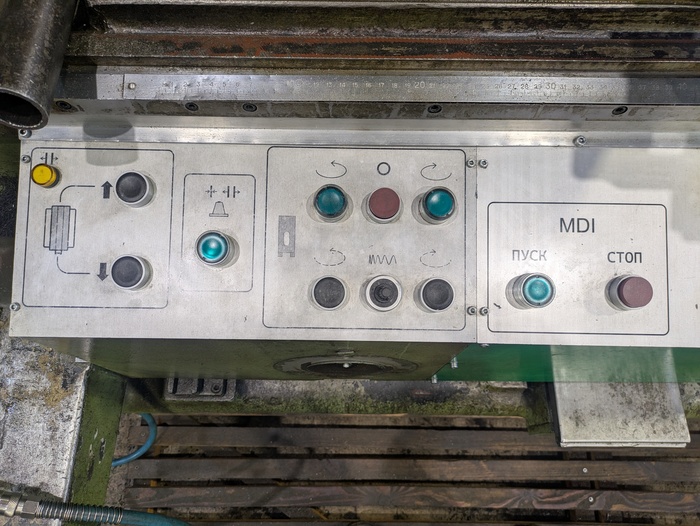
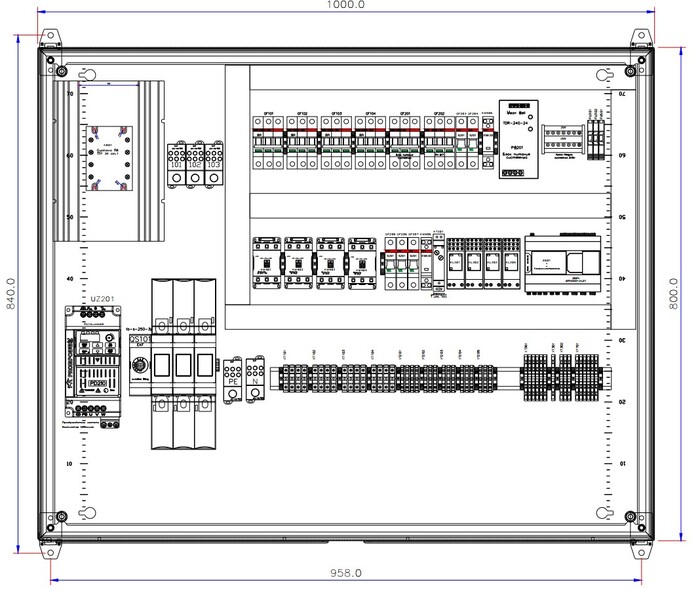
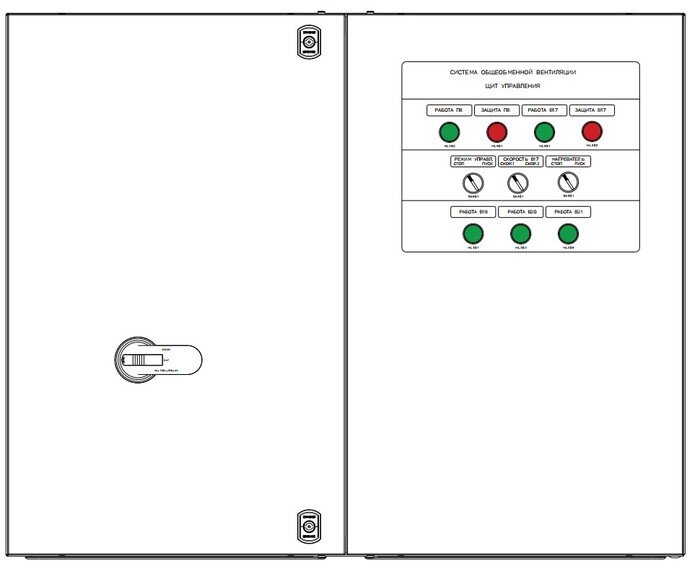
Шкаф (+4 пульта) для управления четырьмя независимыми скреперными приводами навозоудаления
Энкодер и позиционирование
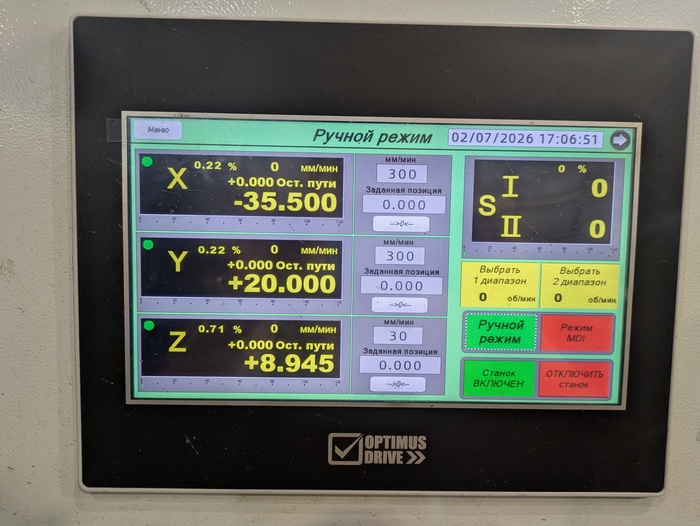
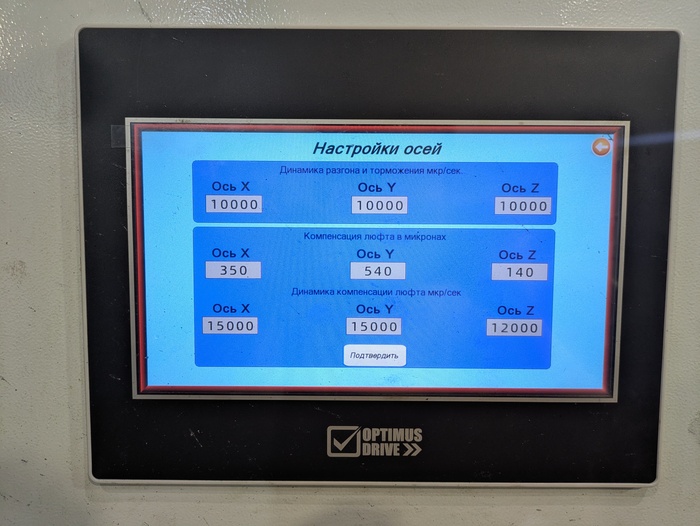
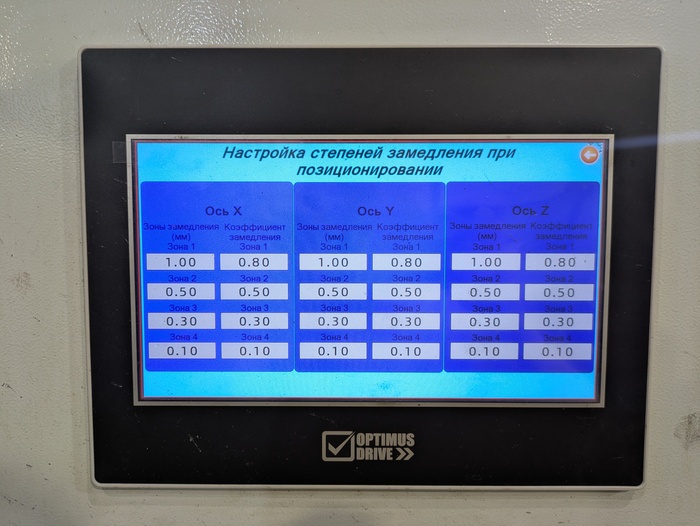
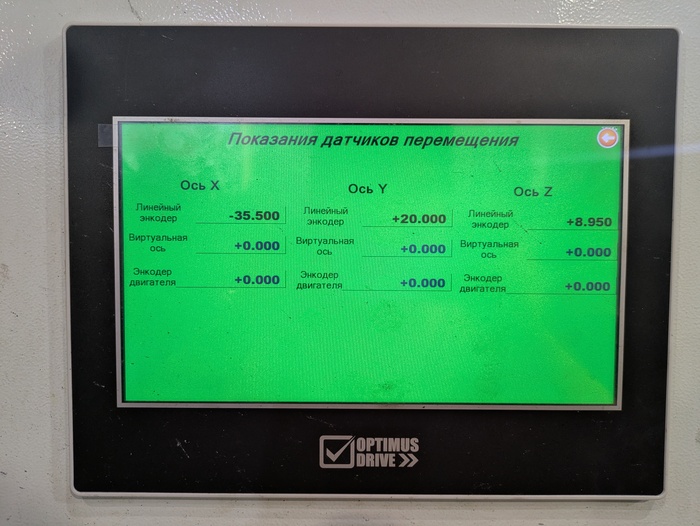
У нас не просто "есть энкодер". На любую пару дискретных входов можно подать сигнал энкодера - до 10 кГц (можно увеличить). Этого достаточно, чтобы отслеживать положение скрепера с точностью до миллиметра (длина аллеи 120+ метров). И позиция сохраняется в Backup-регистрах, которые питаются от батарейки. Даже если питание пропадёт, контроллер помнит, где стоит скрепер, куда ехал и что делал.
Восстановление после сбоя
50 мс - загрузка ядра. 200 мс - полный старт с Wi-Fi. Без потери позиции, без ручного перезапуска. Это не просто цифры. Это оптимизированный код. Это скрепер, который не "забывает", где он остановился, и продолжает цикл с того же шага многоступенчатого динамического алгоритма.
Память - три уровня
- Backup-регистры (CR2032) - для позиции энкодера и текущего состояния в алгоритме. Чтение - мгновенное. Даже если питание пропадёт, контроллер знает, где стоит скрепер и на каком этапе цикла остановился.
- FRAM - для моточасов и данных, которые перезаписываются постоянно. Ресурс - 14 триллионов циклов. Для сравнения: у обычной EEPROM - 100 тысяч. Если бы мы писали моточасы в EEPROM, он бы умер через пару месяцев. FRAM живёт десятилетиями.
- EEPROM - для настроек и калибровок. Там, где не нужна частая перезапись, EEPROM работает без проблем и не деградирует десятилетиями.
Гальваническая развязка 1500 В
RS-485 с развязкой 1500 В - чтобы частотники и длинные линии не сбивали энкодер, не убивали каналы и не дотягивались до ядра. Это не опция. Это стандарт.

Ждём, пока придумают Python. И контрактное производство.
Питание 5-60 В
Контроллер работает от любого источника в этом диапазоне. Терпит скачки, от которых теряют сознание платы конкурентов. Встроенная аппаратная защита - диод от переполюсовки и предохранитель. Программный контроль напряжения непрерывно отслеживает питание и при критических отклонениях отключает каналы, защищая оборудование. По значению питания в разрешении миллисекунд мы видим даже срабатывание промежуточного реле.
И ещё один важный момент: у нас на борту "жирная зона питания" с запасом по току. Даже после отключения электроснабжения и после отключения блока питания контроллер продолжает писать логи и регистрировать отказы ещё 2–3 секунды. Эти события помечаются как «отказ питания» и не смешиваются с техпроцессом. Это даёт полную картину: если что-то пошло не так, мы знаем — куда механизмы успели "доехать", посчитать импульсы энкодера, пока он их еще может отправлять.
Для нормальной работы нам не нужны дорогостоящие блоки автоматического ввода резервного питания, дополнительные аккумуляторы и остальные приборы и устройства фильтрации для качества электроснабжения, мы гарантированно "взлетаем" за 50 мс.
Дискретные выходы - 2 А на канал
MOSFET с защитой от замыкания и перегрева, контроль температуры.
Аналоговые входы - 12 бит
11-12 каналов, 0-10 В / 0-20 мА, 100 кОм. С калибровочными таблицами - подключайте любые датчики с любой характеристикой.
Аппаратная самодиагностика
Мы опрашиваем каждый цифровой канал каждую миллисекунду. Это не просто "подали команду и забыли". После каждой команды на включение или выключение контроллер проверяет, изменилось ли состояние на канале.
Подали команду на катушку реле - проверили, есть ли напряжение на канале. Команда есть, напряжения нет - значит, обрыв провода, перегорел предохранитель или сгорела катушка. Команда отключить, а напряжение осталось - значит, контакты реле залипли или MOSFET пробит.
600+ типов событий. Обрыв цепи, короткое замыкание, перегрев MOSFET - знаем за 1 мс. И не просто знаем, а фиксируем в журнале, чтобы вы могли найти причину, а не гадать, что случилось.
Светодиоды на каждый канал, интерфейс, ядро и Wi-Fi - видно даже без интерфейса. И у них разная логика мигания. Заглянул в шкаф, посмотрел на индикацию - и уже понимаешь, что случилось, даже без ноутбука и веб-интерфейса.
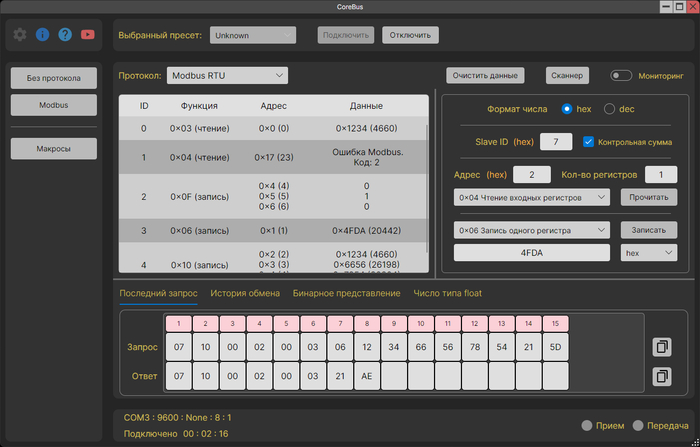
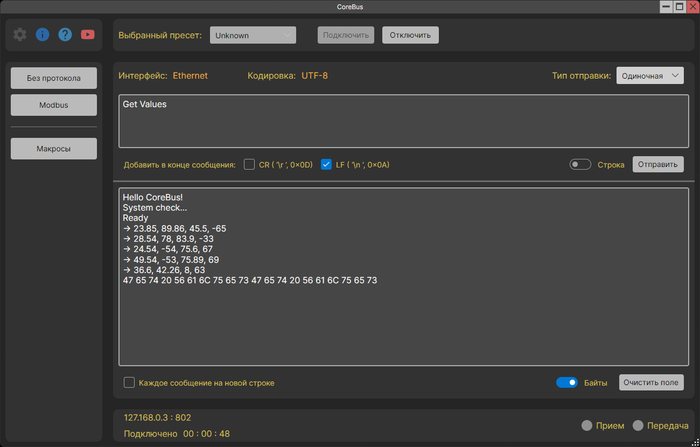
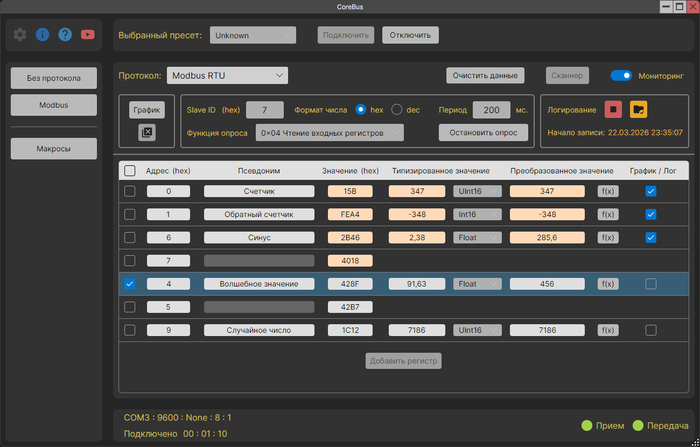
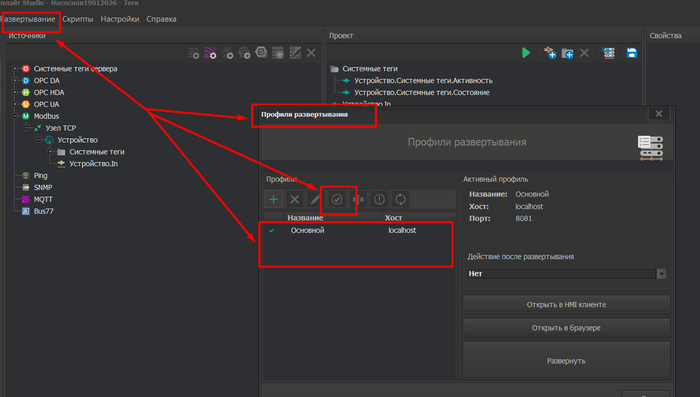
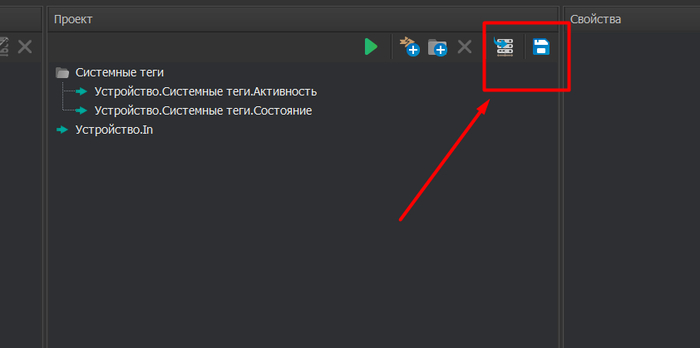
REST API + веб-интерфейс
Настройка и мониторинг с телефона или ноутбука по Wi-Fi. Открытая интеграция с системами верхнего уровня.

Ловим Wi-Fi через три железобетонных перекрытия
Бутлоадер и защита прошивки
Обновление встроенного ПО выполняется через веб-интерфейс - без вскрытия корпуса и программаторов, даже через Wi-Fi.
Но главное - защита от "кирпича". Если по какой-то причине прошивка не загрузилась, контроллер не превращается в бесполезный кусок пластика. После настраиваемого числа неудачных попыток загрузки прошивки он автоматически переключается в бутлоадер.
И всё это - гальваническая развязка, широкий диапазон питания, три уровня памяти, 50 мс восстановления, самодиагностика, опросы каналов 1 мс, светодиоды на каждый канал и компонент, ядро и Wi-Fi, интерфейсы связи, от 66 каналов на "борту" - собрано в одном приборе, модули расширения по 72 канала или 30 ШИМ каналов, масштабирование ПЛК до 32х модулей.
По отдельности эти функции можно найти у разных производителей. Но чтобы всё это работало вместе, без компромиссов, в одном устройстве, с собственной ОСРВ, френдли web-интерфейсом и открытым API - такого на рынке нет.
И мы не просто даём "коробку". Вместе с каждой системой передаём полный комплект документации: пугающе детализированные принципиальные схемы и технически глубоко проработанные, подробные руководства по эксплуатации с пошаговыми инструкциями по настройке всех алгоритмов, чек-листами, короткими справками типа "вопрос-ответ", голоссарий, спецификации с артикулами на все компоненты. И это всё - не для галочки, а чтобы инженер на месте мог разобраться, понять, как устроена система, и быстро решить любую задачу.
Плюс - комплекты ЗИП для быстрой замены "железа" и резервное ПО для восстановления. Всё, чтобы вы не зависели от нас и могли оперативно обслуживать систему сами.
Ваш технологический суверенитет.
Где это всё работает сегодня

Большая мегаферма
Мы не продаём напрямую конечным заказчикам — мы, как производители, работаем через дилеров и интеграторов, которые сами выбирают, с кем им работать. И они выбирают нас. Потому что им удобно с нами. Потому что техподдержка и сервис работает.
Наши «Операторы» уже управляют навозоудалением, микроклиматом, КНС, сепарацией и дезинфекцией на крупнейших фермах России. Более 1000 единиц оборудования в поле.
Мы входим в технологический стек мирового лидера в поставках комплексных решений для мегаферм. Мы не имеем права разглашать название партнёра без его прямого согласия — это условие нашего сотрудничества. Но если вы работаете в отрасли, вы знаете, о ком речь
И у нас есть рекомендательные письма от Росатома. Это не про фермы. Это про уровень требований к контрагентам.
Что дальше

Было ли это божественное вмешательство?
Мы рады, что получили подобный результат и нам приятно рассказать, какие вещи можно делать самостоятельно на уровне мировых лидеров - это оказалось возможно. Нам, конечно, повезло в том, что удалось сразу тестировать системы на огромных предприятиях, хоть такая возможность и появилась не на ровном месте - в прошлом посте я рассказывал, что мы уже долго время занимаемся автоматизацией, было не просто, но обстоятельства сложились благоприятные.
Мы не останавливаемся. У нас есть собственное производство, своя механообработка и SMD-монтаж. С партнёрами мы можем выпускать до 10 000 плат за три недели, и у нас есть складской запас комплектующих, чтобы не ждать поставок.
Мы научились оперативно и эффективно внедрять наш программно-аппаратный комплекс в сложные технологические процессы.
И мы не замыкаемся на одной нише. Мы идём туда, где сложные техпроцессы либо не решаются вовсе, либо решаются через изысканно сложные и дорогие конструкции - мы приходим и делаем проще, надёжнее и эффективнее. Без фантастических бюджетов и нейросетей там, где они не нужны.
Например, в диагностике конвейерных лент на шахтах - там, где пытаются ставить машинное зрение, мы видим более простые и надёжные подходы.
Если хотите узнать, какие отрасли мы сейчас рассматриваем, что рассматриваем изменить в технических характеристиках и ПО, где видим границы применения наших ПАК — пишите в комментарии. Отвечу на всё.
Или может быть у вас есть задачи или предложения?
Спасибо, что дочитали.