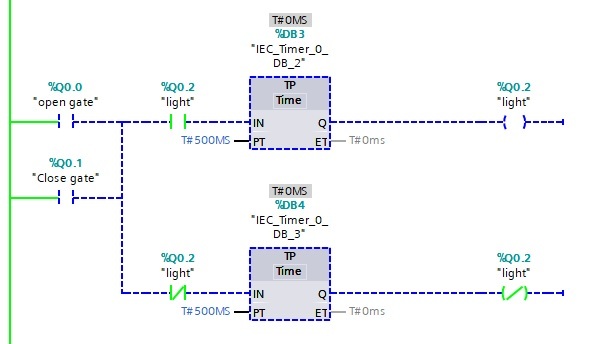
Здравствуйте, понимаю что немного не по теме сообщества. Только начал осваивать TIA. Столкнулся с проблемой, что в проекте при наличии сигнала на выходе q0.0 нет сигнала на открытом контакте q0.0
так же дальше по проекту этот сигнал не приходит, хотя выход активен
Представьте: два разных металла скручены вместе на одном конце. Нагреваете это место — и между свободными концами появляется напряжение. Чем горячее — тем больше напряжение. Это и есть термопара.
👉 Основана на эффекте Зеебека — физическом явлении, открытом ещё в 1821 году.
📌 Не нужны батарейки, процессоры или Wi-Fi. Только два провода — и можно мерить температуру от криогенной до раскалённой стали.
Какие бывают термопары? (и как не запутаться)
Все термопары делятся на типы — по материалам, из которых сделаны провода. Каждый тип — как отдельный “спец" под свою задачу.
Вот самые популярные:
Тип K — “рабочая лошадка"
Хромель + Алюмель
✅ От -200°C до +1350°C
✅ Дёшево, надёжно, везде используют
❌ Не любит серу и вакуум
📌 Где встретите: духовки, котлы, промышленные печи
💡 Цвет изоляции — жёлтый. Запомните — увидели жёлтый провод? Скорее всего, это K-тип.
Тип J — “чувствительный парень”
Железо + Константан
✅ Очень высокая чувствительность — легко ловит малейшие изменения
✅ Дешёвый
❌ Ржавеет! Не для влажной или окислительной среды
📌 Где встретите: старые станки, пластиковые экструдеры
>⚠️ Не кладите в печь выше 750°C — начнёт “плыть”.
Тип T — “холодный чемпион”
Медь + Константан
✅ Идеален для низких температур: от -200°C
✅ Очень точный и стабильный
❌ Медь окисляется — не для жары выше 350°C
📌 Где встретите: холодильники, морозильные камеры, лаборатории
> 🍦 Используют даже в производстве мороженого!
Тип E — “самый чувствительный”
Хромель + Константан
✅ Даёт самое большое напряжение на градус — легко измерять
✅ Отлично работает на холоде
❌ Константан “боится” влаги
📌 Где встретите: научные эксперименты, криогенные установки
> 📈 Если нужна точность при -100°C — это ваш выбор.
Тип N — “улучшенная версия K”
Нихросил + Нисил
✅ Устойчив к окислению и радиации
✅ Не “дрейфует” при высоких температурах (в отличие от K)
❌ Дороже
📌 Где встретите: АЭС, аэрокосмическая промышленность
> 🚀 NASA иногда использует именно его — надёжность на первом месте.
Типы S, R, B — “элита из платины”
Платина + Родий
✅ Работают до +1800°C (!)
✅ Самые точные и стабильные
❌ Очень дорогие — в 10-100 раз дороже обычных
📌 Где встретите: лаборатории, металлургия, производство стекла
> 🏆 Тип S — эталон для калибровки других датчиков.
Быстрая шпаргалка: какую термопару выбрать?
Турбо-выбор термопары.
| Нужна температура... | Берите тип |
| ...ниже -100°C | **T или E** |
| ...до 400°C, нужна точность | **T** |
| ...до 1000°C, бюджет | **K** |
| ...до 1300°C, стабильность | **N** |
| ...выше 1400°C | **S, R, B** |
| ...в агрессивной среде | **N или платиновые** |
Как они выглядят в жизни?
Термопары — не всегда “голые провода”. Чаще вы увидите:
- 🔩 В металлической гильзе — чтобы не сгорела в печи
- 🧵 В стеклотканевой изоляции — для химических производств
- 🔌 С разъёмом — чтобы быстро заменить
- 📏 В виде тонкой иглы — для измерения температуры в продуктах
Почему термопары до сих пор везде?
- 💪 Надёжны — никакой электроники внутри, которая может сгореть
- 🌡️ Широкий диапазон — от жидкого азота до расплавленного металла
- 💸 Дёшевы — особенно тип K
- ⚡ Быстро реагируют — доли секунды!
Главные подводные камни
❗ Нужна компенсация холодного спая — если не учесть температуру на конце провода (где подключён прибор), будет погрешность
❗ Нужен усилитель сигнала — напряжение очень маленькое (микровольты!)
❗ Со временем металлы “стареют” — показания могут “уплывать”
Где вы с ними сталкиваетесь (даже не зная)?
- В духовке или мультиварке
- В котле отопления
- В автомобиле — датчик температуры выхлопных газов
Только закончили станок для изготовления пружин. На разработку станка в общей сложности ушло 6 месяцев работы. Как же важно подбирать правильные алгоритмы и оборудование на каждую задачу по автоматизации.
Приветствую всех, уважаемые друзья, с вами на связи Гридин Семен. Эта статья будет посвящена реализации пружинного станка.
Что из себя представляет станок
Станок состоит из множества прижимных шкивов, барабана подачи проволоки, привода подачи и одной лапки.
Проволока подается через несколько прижимных шкивов, чтобы создать необходимую структуру металла. С помощью двух прижимных шкивов привод протягивает проволоку. А лапкой мы создаём необходимый рисунок пружины.
Длину проволоки мы измеряем с помощью энкодера, а длину подачи лапки мы регулируем с помощью шагового пр1ивода. Подача осуществляется с помощью асинхронного двигателя и преобразователя частоты.
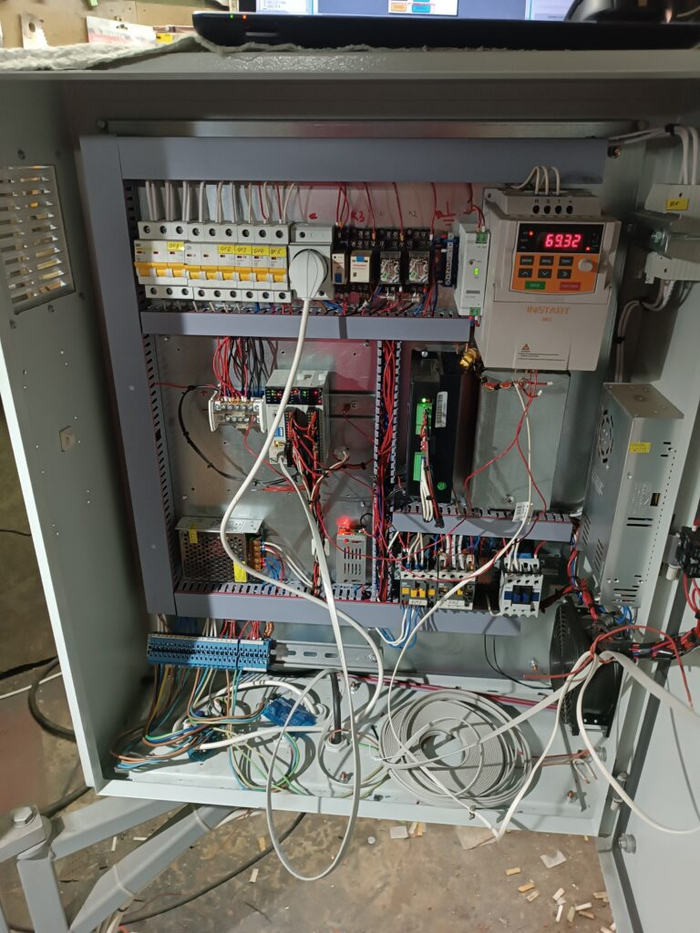
В станок решили мы смонтировать следующее оборудование:
Панель оператора Weintek
ПЛК Optimus Drive с модулем расширения
Преобразователь частоты Instart
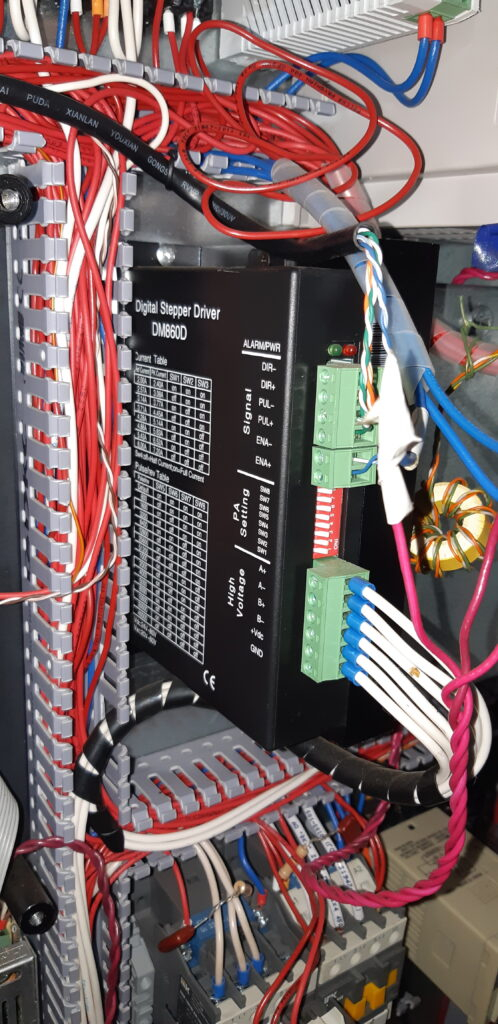
Шаговый привод DM860
Вот такой шкаф у нас получился:
Была пуско-наладка, поэтому небольшой бардак.
В целом делали станок 5 месяцев. Программу пришлось править 6 раз. Потому что никто не знал толком правильного алгоритма и его ещё нужно было описать в контроллере.
ПЛК я доволен, ставили AH16SOT с транзисторным ключами. Процессы там достаточно быстрые. Шустрая машина, есть все необходимые функции для работы с шаговыми приводами и сервоприводами. Есть готовые функции для работы с энкодером. Если кому интересно, пишите в комментах, могу написать отдельную статью.
Функции по движениям достаточно простые, так как это бюджетный контроллер. Но для большинства станочков, где не требуются супер навороченные функции позиционирования ЧПУ, подойдёт.
Вообще станок состоит из компромиссных решений, привод подачи на асинхронном двигателе, лапка на недорогом шаговом двигателе. Вообще есть недостатки с разгоном и торможением, что влияет на точность размера. Но заказчик просил побюджетнее и допуски погрешностей его устроили. Делаем 1 пружину за 1.5 секунды.
Электроника станка
Общий принцип- мы подключали входа ПЛК к кнопкам и энкодеру, а выхода к частотнику, пром. реле и пускатель тормоза.
Нюанс есть с подключением шагового драйвера, он рассчитан на 5 В, а ПЛК на 24 В. Пришлось повозиться с согласованием сигналов.
Выходы контроллера подключили транзисторным ключами к входам контроллера по системе npn.
Рубка реализована с помощью магнитных пускателей и тормоза на постоянном токе.
А, ну ещё конечно важна защита ЭМС, для этого ставится дроссель и фильтр ЭМС на вход частотного преобразователя. Для чего? Если вы не хотите получить проблемы при наводке помех на энкодер. Энкодер начинает пропускать импульсы.
И ещё, связал ПЛК по Ethernet панель, а по интерфейсу RS485 Частотник. Так как пришлось с него принимать по цифре заданную частоту. Нюанс в программе.
На этом я заканчиваю, будут вопросы, пишите в комментариях.
Программная часть
Нюансов куча. Рассказывать обо всём я по понятным причинам не могу. Расскажу базовое.
Панель оператора
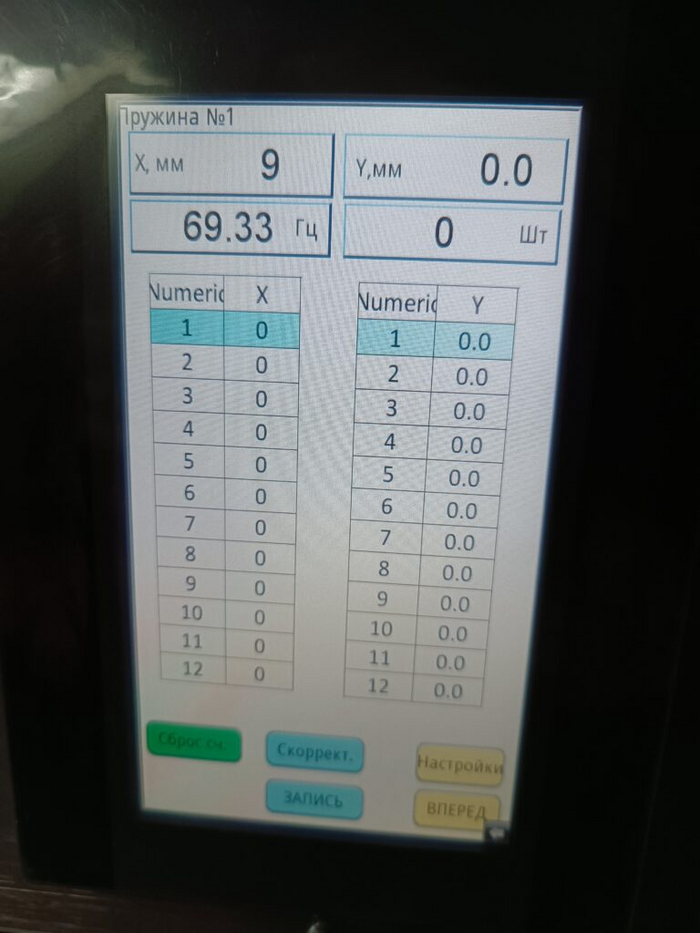
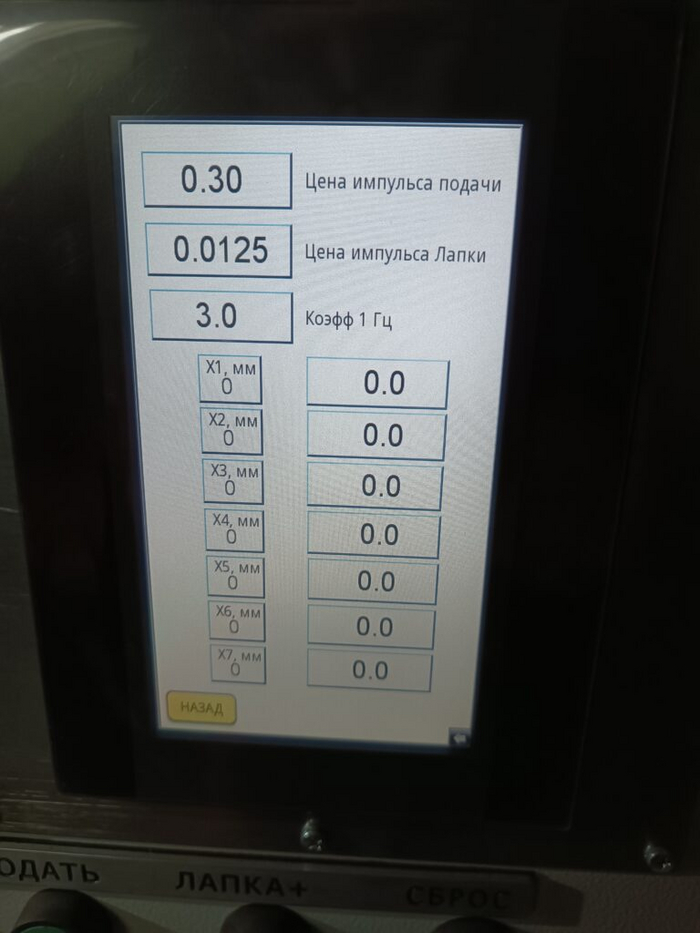
Необходимо было реализовать два столбика, в которых по точкам записывались значения по оси x — подача и по оси y — лапка. Они должны записываться по факту (при движении по нажатию кнопки) и при помощи панели через меню корректировка.
Нужно было сделать так, как примерно на видео.
Получилось вот так:
Вообщем базой реализации были рецепты и программа на макросах. Всего две функции. Фото прилагаю.
ПЛК
В программе сделано 3 режима- ручной, автоматический и режим шаг. В ручном режиме можно поклацать кнопки и позапускать механизмы. В режиме шаг осуществляется отладка рецепта пружины. В режиме автомат мы запускаем станок в рабочем режиме.
Программа работает пошагово, задавая импульсы лапке и вычисляя длину подачи проволоки. В контроллере забиты формулы для вычисления скорости подачи и лапки.
Журнал Control Engineering, освещающий тему промышленной автоматизации, провел опрос специалистов по АСУ ТП, в котором попросил их поделиться мнением по развитию отрасли на следующие 12 месяцев. Выборка была взята из числа квалифицированных подписчиков, занимающихся закупкой оборудования и ПО или составлением спецификаций проектов по категориям:
Респондентам был предоставлен список из 15 категорий программных и аппаратных средств, используемых в автоматизации. Всего было получено 158 ответов. Ниже приведены краткие данные, подготовленные Марком Т. Хоске (Mark T. Hoske).
Топ-10 наиболее востребованных автоматизированных технологических процессов
Респондентов спросили, в отношении каких автоматизированных технологий и сервисов вы ожидаете увеличение числа проектов в ближайшие 12 месяцев? Предлагалось дать несколько ответов, поэтому сумма результатов более 100%. Итак, в Топ-10 входят:
51 % – Автоматизация производства 37 % – Оптимизация процесса 36 % – Робототехника 29 % – Расширенный контроль процессов (APC) 21 % – Миграция DCS 19 % – Автоматическое испытательное оборудование 19 % – Модельный прогнозирующий контроль (MPC) 19 % – Автоматизация склада 19 % – Автоматизированные транспортные средства (AGV) 17 % – Автоматизированная сборка
Таким образом, автоматизация производства, оптимизация процессов и робототехника стали тремя ведущими технологиями, развитие которых респонденты ожидают увидеть в ближайшие 12 месяцев.
Топ-10 наиболее востребованных технологий систем управления
46 % – Контроллеры (PLC, PAC, выделенные системы управления, ПК и т.д.) 42 % – Дизайн управления 41 % – Панели управления 40 % – Человеко-машинный интерфейс (HMI) 31 % – Промышленные ПК (IPC) 27 % – Диспетчерское управление и сбор данных (SCADA) 26 % – Контроль температуры 24 % – Контроль мощности 23 % – Контроллеры движения 21 % – Система управления потоком
Контроллеры, схемы и панели управления, человеко-машинный интерфейс и интерфейс оператора являются ведущими технологиями систем управления, которые будут развиваться ближайший год.
В целом специалисты ожидают увеличение расходов в 14 категориях в течение следующих 12 месяцев. Среди списка из 39 категорий систем управления респонденты ожидают увеличение расходов, причем по всем 39 позициям.
На вопрос, какие факторы повлияли на ваши ответы, специалисты ответили следующим образом:
«Увеличивается значение цифровой трансформации»;
«Желание предложить заказчикам самые передовые технологии»;
«Производство требует более точного контроля, а системы 20-летней давности не отвечают новым требованиям»;
«Автоматизация помогает бороться с нехваткой кадров, образовавшейся в следствие пандемии».
=== Материал переведен и подготовлен Московским заводом тепловой автоматики (МЗТА), поэтому пользуясь случаем добавим, что в российских реалиях следует ожидать волну импортозамещения в связи с уходом таких производителей, как Siemens, Schneider Electric, Danfoss. Разработка промышленных контроллеров, способных заместить продуктовые линейки этих производителей – процесс не быстрый, поэтому прогноз по линии импортозамещения можно сделать не на 12 месяцев, а на существенно больший период.
Материал о модулях и системах, обеспечивающих сетевое соединение, превращая традиционные ПЛК в контроллеры автоматизации (ПАК), опубликованная Дэвидом Петерсоном в журнале Control Automation.
Название ПЛК (PLC) останется надолго, независимо от того, какие возможности содержатся в устройстве, будь то ввод-вывод, сетевое взаимодействие или даже операционная система, он все равно будет называться программируемым логическим контроллером. Сигналы по-прежнему будут обрабатываться совместно с реальными устройствами ввода-вывода; мы просто добавляем новые способы взаимодействия с другим оборудованием и миром в целом. Называйте их как хотите – PLC (Programmable Logic Controller), PAC (Programmable Automation Controller), IPC (Industrial PC) – все это допустимые названия, но ярлык ПЛК (PLC) наверняка будет трудно заменить.
Добавление усовершенствованных коммуникационных модулей в систему является последним строительным блоком современной системы ПЛК.
Системы связи в ПЛК
Как и в случае со многими функциями внутри ПЛК, мы можем обнаружить системы связи, встроенные непосредственно в модуль центрального процессора (ЦП) или установить дополнительные модули для расширения системы и повышения ее гибкости.
Интерфейс программирования
В некоторых ПЛК необходимо сразу же различать программирование и сетевое взаимодействие. Иногда это достигается через один и тот же порт интерфейса, так что разницы на самом деле нет. Однако выделенный порт программирования обычно появляется одним из двух способов.
USB-порт (обычно тип B, mini, micro или тип C) – это соединение типа «точка-точка», используемое исключительно в ПЛК для загрузки и выгрузки программ на хост-компьютер IDE (Integrated Drive Electronics). Несмотря на исключительную простоту и надежность, он требует, чтобы компьютер физически находился вблизи шкафа управления, если вам когда-либо понадобится редактировать или контролировать ПЛК.
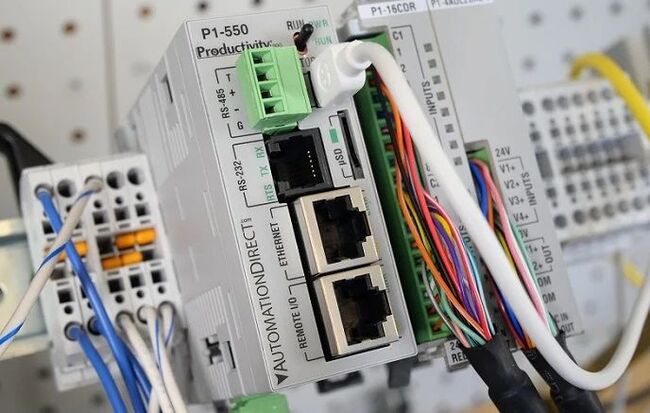
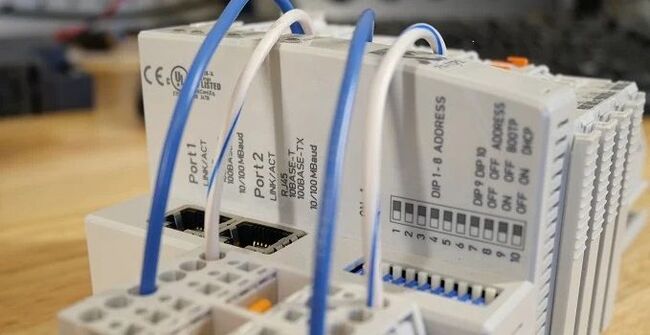
Этот процессор ПЛК имеет микро-USB для программирования и множество других сетевых интерфейсов
Альтернативой, и часто на немного более старом оборудовании, является 9-контактный последовательный интерфейс DB9. Мы не можем сразу сказать, что он отвечает за процесс программирования, поскольку этот порт также несет общий интерфейс RS-232 для систем связи, таких как Modbus. Однако, поскольку это также интерфейс точка-точка, он не встречается в больших сетях. Разновидностью разъема DB9 является 6-контактный RJ11, как узкая версия разъема CAT5/6.
Встроенный сетевой интерфейс
«Встроенный» – это термин, который мы используем, когда что-то встроено прямо в вычислительный блок устройства, в данном случае в ЦП ПЛК. Большинство модулей ЦП имеют по крайней мере один сетевой интерфейс, хотя отдельные имеют несколько. Иногда даже кажется, что проектировщики соревновались, кто сможет втиснуть больше сетевых портов на фронтальную поверхность модуля.
Эти встроенные порты обычно включают один или несколько из следующих вариантов: Ethernet, PROFINET, RS-485 и RS-232. Ethernet и PROFINET выглядят как разъем RJ45, общий для всех известных сетей Ethernet. RS-232, как отмечалось ранее, может выглядеть как разъем DB9, обычные винтовые клеммы или может быть смонтирован прямо в более простой 4-проводной жгут, общий с RS-485.
Несколько различных вариантов последовательного сетевого порта для RS-232/422/485
Из этих вариантов RS-232 – единственный, предназначенный для одиночного соединения точка-точка. Это ограничивает его функциональность в сетевых технологиях, но его часто можно встретить среди устаревшего оборудования, поэтому он остается.
Остальные три типа сетей являются многоточечными, то есть они могут взаимодействовать со многими устройствами, каждое из которых имеет уникальный адрес. RS-485 – это немного устаревший стандарт, и в настоящее время он широко используется для связи через Modbus, PROFIBUS и другие фирменные сети, такие как Data Highway (DH485) от Allen-Bradley.
Industrial Ethernet и PROFINET являются вариациями исходного стандарта Ethernet. Большинство крупных компаний склонны выбирать один из двух протоколов и придерживаться его. Тем не менее, некоторые ПЛК позволяют запускать контроллер как сканер или хост с любым протоколом, иногда даже одновременно, поскольку физический порт один и тот же. Если ваш процесс автоматизации зависит от многих марок и поколений оборудования, взаимодействующих с одним и тем же контроллером, вам, вероятно, лучше выбрать соответствующие модули, которые можно выделить для каждой задачи.
Модульные сетевые интерфейсные карты
Производители ПЛК используют две разные стратегии. Либо все коммуникации интегрированы в модуль ЦП, либо ЦП остается очень простым, и мы используем дополнительные карты для поддержки сетевых интерфейсов. Вторая стратегия обычно применяется при работе с большой системой с более чем 2-3 сетевыми точками.
Вы можете приобрести модули, совместимые с ранее упомянутыми системами, включая Ethernet, PROFINET, RS-232 и RS-485, но есть и много других. Вот несколько примеров, хотя их гораздо больше:
В этом ПЛК центральный процессор ограничен только программированием, оставляя сетевую задачу добавляемым модулям по мере необходимости
Волоконно-оптический
Обычно это модуль Ethernet с физической оптоволоконной сетью. Вы вряд ли найдете много процессоров со встроенным оптоволокном.
EtherCAT
Этот протокол, созданный Beckhoff Automation, является более скоростным вариантом Ethernet, специально предназначенным для технологий автоматизации управления (отсюда и название CAT). Некоторые контроллеры включают его в качестве встроенного протокола.
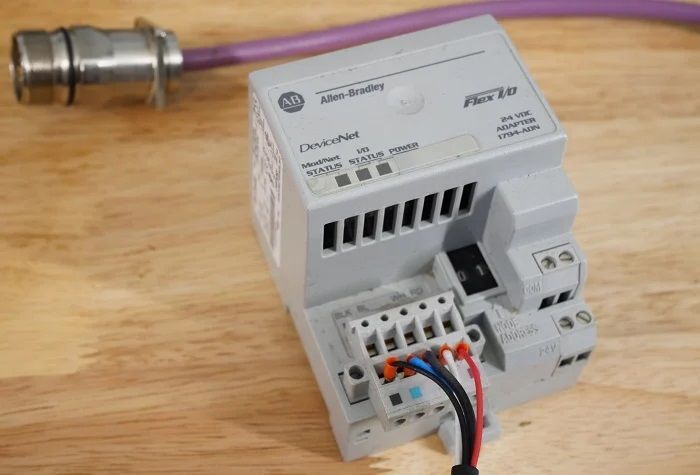
DeviceNet
Эта сеть, построенная на основе технологии CAN, была основана Allen-Bradley, но теперь переведена в open-source для более широкой интеграции. Она использует плоский или круглый многожильный кабель.
Этот модуль DeviceNet (фактически для полевой системы ввода-вывода) использует круглый кабель
HART
Удаленный преобразователь с адресацией по магистрали – это цифровой протокол, работающий на аналоговом сигнале 4-20 мА, позволяющий устанавливать устройства HART в существующую аналоговую систему. Однако для HART требуется специальный модуль; простой аналоговый выходной модуль не может транслировать протокол HART (Highway Addressable Remote Transducer).
IO-Link
Все более популярный протокол позволяет передавать данные и конфигурацию по обычному кабелю M12, а простые дискретные устройства могут существовать рядом с интеллектуальными устройствами IO-Link, что обеспечивает большую гибкость на полевом уровне.
Многие другие протоколы можно найти в модулях и встроить в ЦП для специализированных приложений.
Установка и настройка модуля
Процесс во многом одинаков для всех моделей ПЛК. Модульные платы вставляются в шасси или подключаются с помощью жгута проводов. IDE всегда содержит менеджер оборудования, который проверяет конфигурацию всех модулей и встроенных сетей. Их можно сканировать или вручную добавлять в автономном режиме.
Установка и ввод в эксплуатацию модульной сетевой карты включает ее добавление в диспетчер оборудования и настройку адреса
Большинству сетей требуется адрес или номер узла, который легко устанавливается. После загрузки сетевая карта запускается и может сканировать собственную сеть на предмет новых устройств или добавлять эти устройства вручную. Точные шаги различаются в зависимости от IDE, но это очень последовательный процесс.
Устранение неполадок в системах связи ПЛК
Большинству специалистов не нравится устранение неполадок в сети, поскольку это обычно гораздо сложнее, чем для сигналов ввода-вывода. Высокоскоростные данные невозможно отследить с помощью простых портативных инструментов, а приложения гораздо более зависимы от программного обеспечения, чем, скажем, дискретные обновления включения/выключения. Но поскольку контроллеры становятся более способными обрабатывать множество задач, они должны быть достаточно гибкими, чтобы взаимодействовать с большим количеством оборудования, а это значит сетевыми протоколами.
Большое разнообразие полевых устройств означает, что каждый ПЛК при необходимости будет включать различные интерфейсы ввода-вывода и связи
Материал подготовлен Московским заводом тепловой автоматики (МЗТА)
Уважаемые коллеги, с удовольствием делимся экскурсом в прошлое отечественной автоматизации и публикуем историю, рассказанную Михаилом Непомниным – начальником КБ автоматизации ЭПО «Сигнал» о создании одних из первых отечественных аппаратных и программных средств АСУ ТП.
В уже далеком 1988 году я после окончания университета и 5 лет работы в элитном цехе регулировщиком РЭА я перешел в ОМА (отдел механизации и автоматизации), в новое бюро автоматизации поверочных работ (КБ АПР сокращенно). Часть инженеров местного политехнического института калымила, внедряя нам автоматизацию проверки выпускаемой продукции. А мы были у них на подхвате и учились уму разуму или постигали тонкости автоматизации.
Продукцией же были специальные датчики давления, выпускаемые для военных – они производились двух типов. Нас этом я заканчиваю рассказ про сами датчики, поскольку это секретная продукция. А вот автоматизированные рабочие места для их проверки при выпуске секретом не являются. Про них я могу говорить свободно. Тем более, что АРМы сейчас уже не работают на выпуске, заменены на новую модификацию. Так что я даже коммерческую тайну не выдаю.
И так, в конце 1987 года создалось КБ, а в апреле 1988 года я перешел туда инженером-программистом. Вроде бы так моя должность называлась. КБ было преимущественно молодежное. Руководил им грамотный товарищ, который через полгода стал замом Главного инженера, а я стал начальником КБ.
Политех разрабатывал нам АРМы проверки и один АРМ «центральный процессор» для управления процессом и ведения архивов, как на бумажном носителе, так и в электронном виде. Женская часть КБ разбиралась с КД по проверки и помогала в языке высокого уровня ТурбоБейсик сочинять политеховцам программу центрального процессора. Вернее, разрабатывали прогу девчонки при постоянном контроле и подсказке работников политеха. А мужеска часть КБ, на тех же условиях разрабатывала в ассемблере программу для контроллера К1-20 микропроцессорной 580-й серии микросхем.
И не смейтесь над нами. Никаких Виндоус тогда еще не было, ТурбоБейсик был крутой язык и в ассемблере было не западло писать программу. Напомню, что это был далекий 1988-й год. Мы планировали писать программу центрального процессора на отечественной ЭВМ ДВК, но потом разжились IBM-ками. И если на ДВКшках мы в редкие минуты отдыха гоняли компьютерную игру Тетрис, то на IBMках начали кроме игр серьезно изучать языки высокого уровня типа Турбо- и Квикбейсика.
Поскольку я в университете прослушал курс лекций программирования на Алголе и Фортране, а также прошел практику по программированию, я тоже начал вместе с дамами нашего КБ программировать на Бейсике. А не осваивал один ассемблер для К1-20. Изучение Бейсика мне кстати очень пригодилось в дальнейшем. Ну об этом потом. А пока расскажу о составе и характеристиках контроллера К1-20. Это его типовое что ли название. Реально у нас были две опции контроллеров с шифрами МС2702 и МС2721.
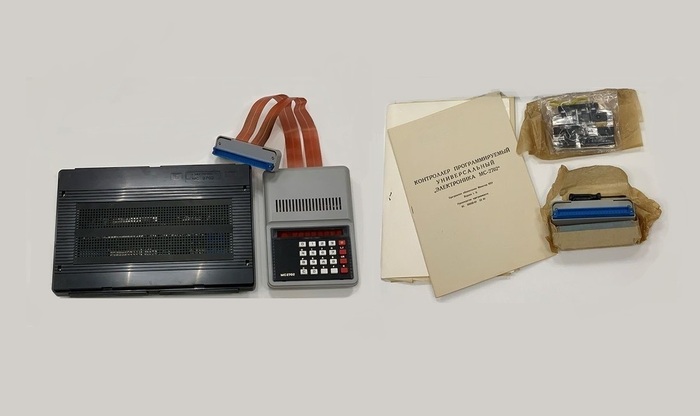
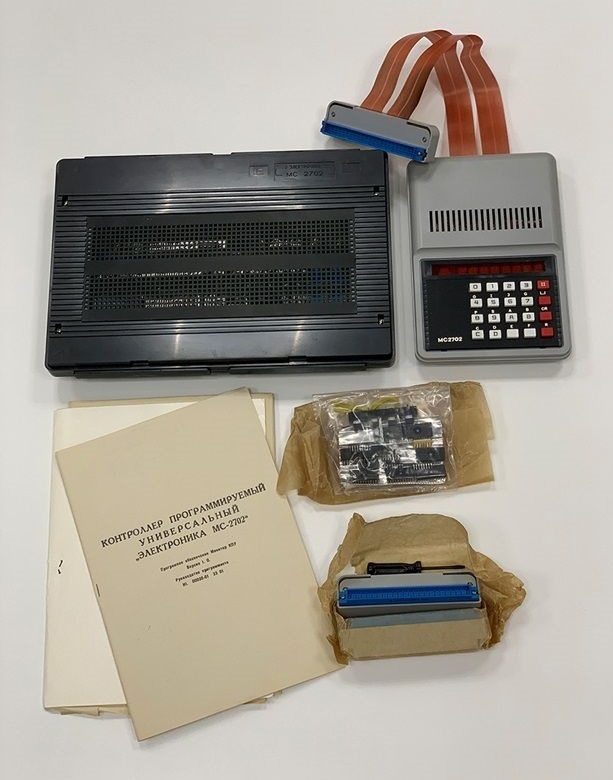
На рисунках видно, чем они отличались друг от друга, но в общем и целом контроллеры были почти одинаковы.
Контроллер МС2721 с пультом
Контроллер МС2102 с пультом
Питание 5В было мощное – 3А. Контроллер грелся, но работал. Скажу, что мы успели поставить три АРМа в одном цехе и один в другом. Работа кипела. Собирались внедрять программу «центральный процессор» и увеличивать количество АРМ и диапазон охвата. Но (как часто в жизнь вмешивается это чертово «Но») наступила конверсия и датчики стали нужны в значительно меньших количествах, а с ними не стала нужна и наша автоматизация.
Хотел привести краткие технические характеристики контроллеров, но у меня документации давно нет. А в интернете что-то не нашел. Поэтому пишу, что помню.
Эти контроллеры содержали полноценные микропроцессорные комплекты 580-й серии. С контроллером прямого доступа к памяти, контроллерами прерываний и последовательного интерфейса. Разница была в конструкции пульта и количестве разъемов.
У МС2702 было 3 разъема, но большие. У МС2721 – 5, из которых 4 – меньшего размера, а пятый – такой, кажется, как у МС2702.
В коробочке в фольге микросхема ППЗУ для прошивки пользовательских программ. ЗИП в конденсаторную бумагу завернут, кроме картонной упаковки. Маленькая отвертка присутствует. В общем – кайф или мечта автоматизатора советских времен. Итак, переходим к основной части.
Состав АРМ:
Контроллер МС2702 (2721)
Блок питания контроллера ГН 09-01
Вольтметр В7-28 (В7-34)
Блок сопряжения
Жгуты
Один тип контроллеров для потенциометрических датчиков, другой – для индуктивных. За давностью лет и начинающимся склерозом, не помню, какой для каких датчиков применялся. Зато помню, какой вольтметр для чего служил. Поскольку В7-28 мог измерять напряжение в долях от опорного, но не мог работать с переменным напряжением, он обсчитывал потенциометрические датчики.
Вольтметры В7-28 и В7-34
А вольтметр В7-34 работал с индуктивными датчиками. Они питались от напряжений с частотой 400 Гц или 2000 Гц, и спокойно обсчитывались умеющим измерять переменку В7-34. Для потенциометрических датчиков опорное напряжение бралось со штатного блока питания ГН 09-01. Индуктивные же запитывались со специализированного блока переменного тока заводской разработки.
Блок сопряжения состоял из отдельного корпуса и платы коммутации и платы связи с вольтметром. Плата коммутации осуществляла перебор датчиков на коллекторе. Плата вольтметра программировала вольтметры и посылала команду «Пуск» при считывании данных с каждого проверяемого датчика. Корпус служил для подсоединения плат и соединения разъемов внешних жгутов.
Жаль, что у меня нет фото АРМа целиком, фото блока сопряжения и схем АРМа. Могу только по памяти изобразить функциональную или структурную схему АРМа и блока сопряжения.
Все пропало в период перестройки и дикого капитализма. И так промышленный уклад у нас в стране был не очень крепкий. А в период позднего Горбачева и Ельцина стал вообще ни в дугу.
Документацию выкидывали, оборудование расхищали, считали, что тем, кто не производит материальные ценности платить надо минималку или вообще выгонять с работы.
Хорошо сейчас процесс потихоньку налаживается.
Еще раз благодарим Михаила Непомнина за рассказ, а также дополним его историей развития Московского завода тепловой автоматики (МЗТА), а точнее кратким перечнем приборов автоматизации, также предшественников современных ПЛК, которые были созданы до событий, о которых идет речь в статье, то есть до 1988 года.
1955-60 гг. – первый электронный прибор – ЭР-111-К – «КОМЕГА», дифференциальные манометры и электронные приборы регулирования – РБ-100
1960-е – комплекс – КРИСТАЛЛ, регулирующий прибор импульсного действия с бесконтактным выходом – РПИБ, дифференциатор ламповый – ДЛ-Т, электронные сигнализаторы и ограничители температуры ЭСП-К, ЭОС-Т
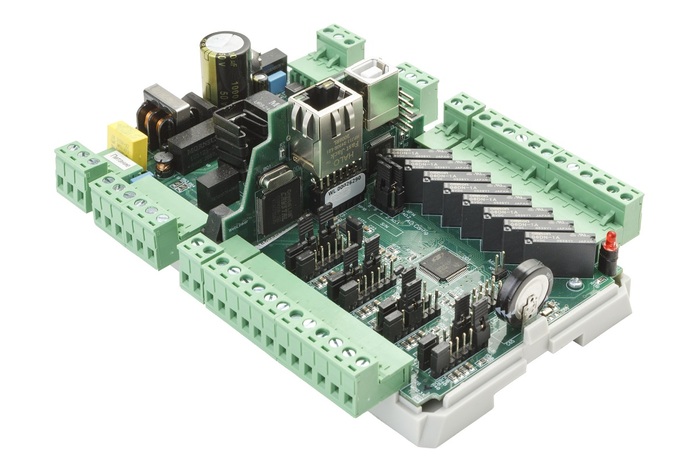
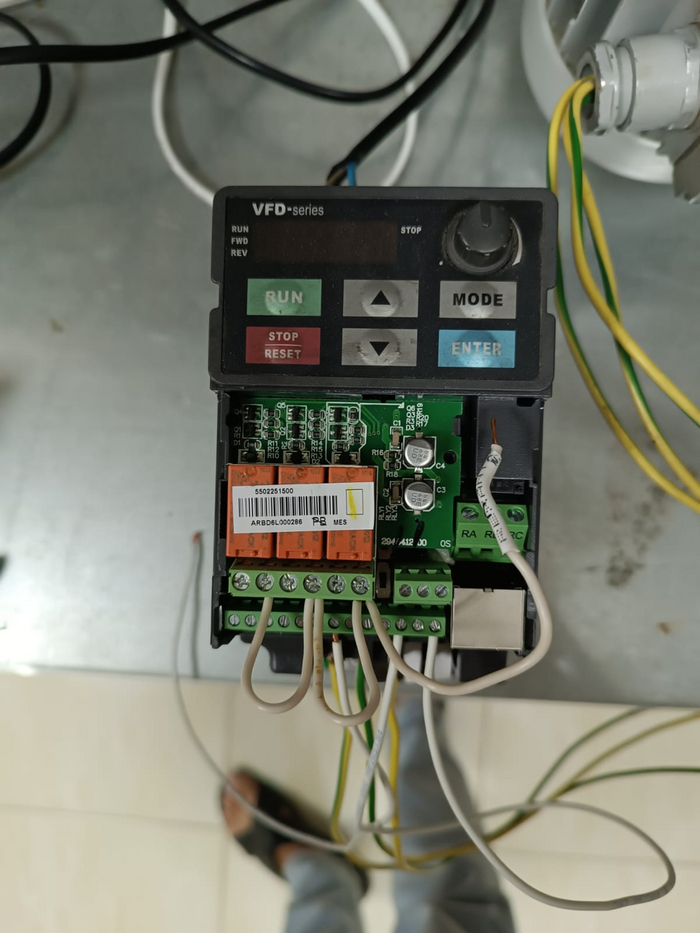
С функцией ПЛК разработан преобразователь частоты Delta VFD серии E. Интересная вещь. Это как один из вариантов, как можно делать простые станки без дорогостоящего контроллера.
Преобразователь DELTA VFD-E
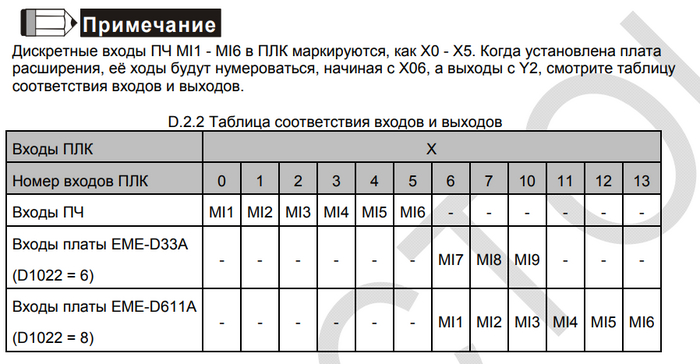
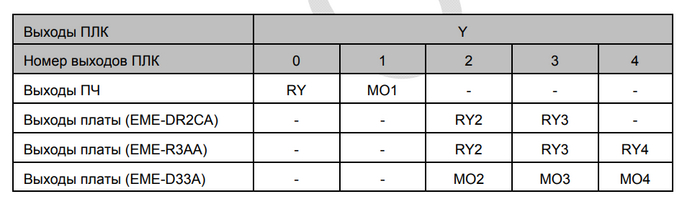
Тайваньский преобразователь частоты с дополнительной платой расширения(3 доп. релейных выхода):
Программирование осуществляется так же, как и программируемым логическим контроллером Delta DVP с помощью софта WPLSoft.
Связь c ПК осуществляется по интерфейсу RS232.
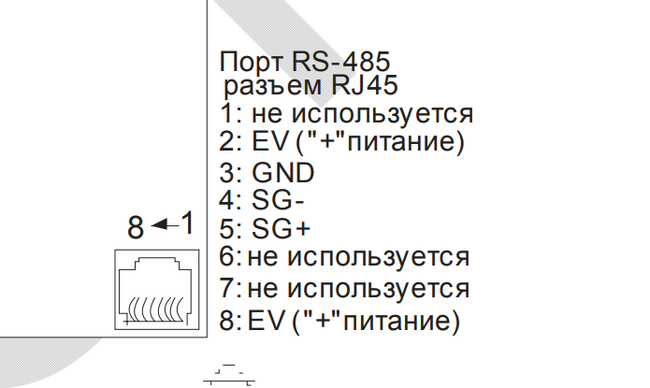
Распиновка кабеля RJ-45
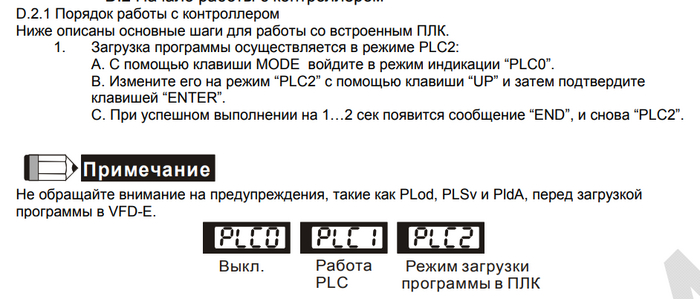
Не забываем поставить нужный режим в настройках ПЧ.
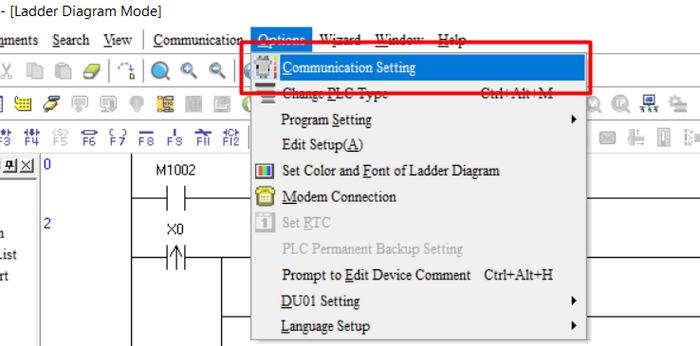
Программное обеспечение WPLSoft
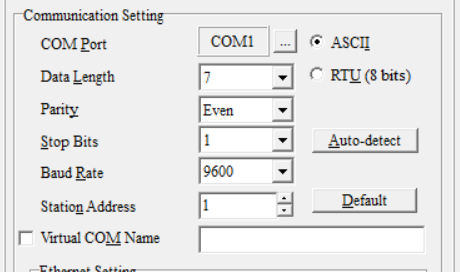
С официального сайта скачиваем ПО, и производим настройки связи.
Для того чтобы связаться с ПЧ. Достаточно вот таких настроек: