

Неизвестный Товарищ Че
Показать полностью
1
Американские военные сфабриковали доказательства существования инопланетных технологий и позволили слухам распространяться, чтобы скрыть реальные секретные программы по разработке оружия.
Небольшое подразделение Пентагона несколько месяцев расследовало теории заговора о секретных вашингтонских программах по изучению НЛО, когда обнаружило шокирующую правду: по крайней мере одна из этих теорий подпитывалась самим Пентагоном.

Тот самый заголовок «летающая тарелка» в местной газете в 1947 году.
Расследование, инициированное Конгрессом, вернуло следователей в 1980-е годы, когда полковник ВВС посетил бар недалеко от Зоны 51, сверхсекретного объекта в пустыне Невады. Он показал владельцу бара фотографии, на которых, возможно, были изображены летающие тарелки. Фотографии повесили на стены, и в местный фольклор вошла идея о том, что американские военные тайно испытывают найденные инопланетные технологии.

Якобы фото разбившегося в Розвелле НЛО
Но полковник преследовал цель — дезинформацию. Фотографии были сфальсифицированы, признался ныне отставной офицер следователям Пентагона в 2023 году. Вся эта затея была уловкой, чтобы скрыть то, что на самом деле происходило в Зоне 51: ВВС использовали этот объект для разработки сверхсекретных истребителей-невидимок, которые рассматривались как важнейшее преимущество против Советского Союза. Военные руководители опасались, что программы могут быть раскрыты, если местные жители каким-то образом увидят испытательный полет, скажем, истребителя-невидимки F-117, самолета, который действительно выглядел не от мира сего. Лучше бы они поверили, что он прибыл из Андромеды.
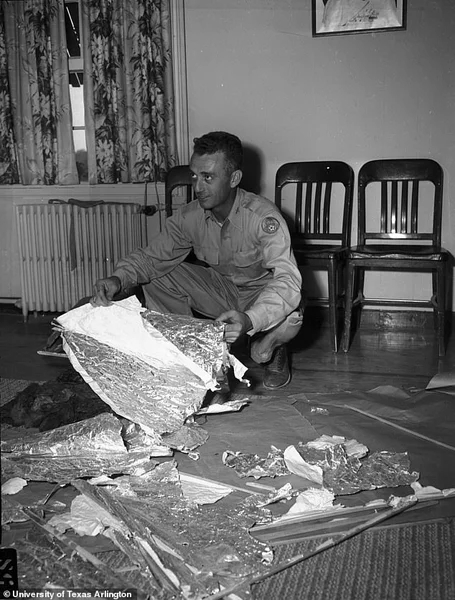
Джесси Марсель якобы с обломками НЛО
Этот эпизод, о котором сообщается впервые, был лишь одним из серии открытий, сделанных командой Пентагона в ходе расследования многолетних утверждений о том, что Вашингтон скрывал информацию о внеземной жизни. Результатом этих усилий стал доклад, опубликованный в прошлом году Министерством обороны, в котором утверждения о сокрытии информации правительством были признаны безосновательными.

Джесси Марсель якобы с обломками НЛО
На самом деле, как показало расследование Wall Street Journal, сам доклад представлял собой попытку сокрытия правды — но не в том смысле, в каком это пытаются представить сторонники теорий заговора об НЛО. В публичном раскрытии была упущена правда о некоторых основополагающих мифах об НЛО: Пентагон сам иногда намеренно разжигал страсти, фактически направляя дезинформацию против собственных граждан.
В то же время сама природа операций Пентагона — непрозрачная бюрократия, которая держала секретные программы внутри секретных программ, прикрываясь вымышленными историями, — создала благодатную почву для распространения этих мифов.
Эти открытия представляют собой ошеломляющий новый поворот в истории культурной одержимости Америки НЛО. В десятилетия после того, как в 1938 году радиопередача романа Герберта Уэллса «Война миров» посеяла панику по всей стране, предположения об инопланетных посетителях оставались в основном уделом бульварных газет, голливудских блокбастеров и костюмированных конференций в Лас-Вегасе.
Совсем недавно ситуация приняла зловещий оборот, когда несколько бывших чиновников Пентагона публично заявили о существовании правительственной программы по использованию внеземных технологий и сокрытию их от американцев. Эти заявления привели к расследованию со стороны Пентагона.
Сейчас появляются свидетельства того, что попытки правительства распространить мифы об НЛО начались еще в 1950-х годах.
Данный материал основан на интервью с двумя десятками действующих и бывших американских чиновников, ученых и военных подрядчиков, участвовавших в расследовании, а также на тысячах страниц документов, аудиозаписей, электронных писем и текстовых сообщений.
Порой, как в случае с обманом вокруг Зоны 51, военные распространяли фальшивые документы, чтобы создать дымовую завесу для реальных секретных программ по разработке оружия. В других случаях чиновники позволяли мифам об НЛО укореняться в интересах национальной безопасности — например, чтобы помешать Советскому Союзу обнаружить уязвимости в системах защиты ядерных установок. Истории, как правило, начинали жить своей собственной жизнью, как, например, тридцатилетнее путешествие предполагаемого куска космического металла, который оказался совсем не тем, чем казался. А одна давняя практика больше напоминала ритуал посвящения в студенческом братстве, который вышел из-под контроля.

Зона 51
Следователи до сих пор пытаются установить, было ли распространение дезинформации делом рук местных командиров и офицеров или же это была более централизованная, институциональная программа.
Как показало расследование издания Journal, Пентагон опустил в публичной версии отчета 2024 года ключевые факты, которые могли бы помочь развеять некоторые слухи об НЛО, как для защиты секретной информации, так и во избежание неловких ситуаций. В частности, ВВС настаивали на упущении некоторых деталей, которые, по их мнению, могли поставить под угрозу секретные программы и навредить карьерам.
Отсутствие полной прозрачности лишь подпитывает теории заговора. Члены Конгресса сформировали группу, состоящую в основном из республиканцев, для изучения неопознанных аномальных явлений (НЭЯ), как это называется в бюрократической терминологии. Группа потребовала от разведывательного сообщества раскрыть, какие ведомства «участвуют в программах поиска и извлечения НЭЯ».
Скептицизм сторонников Трампа в отношении «глубинного государства» еще больше подпитывает представление о том, что правительственные бюрократы скрывали эти секреты от американской общественности. На ноябрьских слушаниях двух подкомитетов Палаты представителей по надзору республиканка Нэнси Мейс из Южной Каролины выразила сомнение в докладе Пентагона. «Я не математик, но могу сказать, что это не сходится», — сказала она.
Шон Киркпатрик, точный ученый в очках, который когда-то много лет изучал колебания в лазерных кристаллах, приближался к выходу на пенсию с государственной службы, когда получил звонок, изменивший его жизнь.
К 2022 году он стал главным научным сотрудником Центра ракетной и космической разведки на полигоне Редстоун недалеко от Хантсвилла, штат Алабама. Однажды утром в 6:30, сидя за своим столом, попивая кофе и просматривая разведывательные отчеты, поступившие за ночь, он услышал звонок своего настольного телефона Tandberg — по сути, секретной версии FaceTime.
Заместитель министра обороны из Пентагона, надевая галстук, рассказывал Киркпатрику о новом подразделении, которое Конгресс распорядился создать для изучения неопознанных аномальных явлений. «Мы с заместителем министра составили список кандидатов, и вы — на первом месте», — передал чиновник, добавив, что они остановили свой выбор на Киркпатрике, потому что у него было научное образование, и он создал полдюжины организаций в разведывательном сообществе.
«Это и есть настоящая причина, — возразил Киркпатрик, — или я единственный, кто настолько глуп, чтобы сказать: „да“?» Вскоре Киркпатрик запустил в работу Управление по разрешению аномалий во всех областях (AARO). Это был лишь последний из целого ряда специальных правительственных проектов, созданных для изучения НЛО на протяжении более полувека. AARO, как его называют, работало из неприметного офиса недалеко от Пентагона, имея несколько десятков сотрудников и засекреченный бюджет. Миссия состояла из двух частей. Одна из них — сбор данных о наблюдениях, особенно вблизи военных объектов, и оценка возможности их объяснения земными технологиями. На фоне растущего общественного внимания число таких сообщений резко возросло в последние годы: с 144 в период с 2004 по 2021 год до 757 за 12 месяцев после мая 2023 года. AARO связывало большинство инцидентов с воздушными шарами, птицами и распространением дронов, заполонивших небо. Как выяснили исследователи, многие сообщения пилотов о парящих шарах на самом деле были отражением солнца от спутников Starlink. Они всё ещё изучают, могут ли некоторые необъяснимые события быть результатом применения иностранных технологий, например, китайских самолётов, использующих методы маскировки нового поколения, искажающие их внешний вид.
В ходе расследования выяснилось, что некоторые, казалось бы, необъяснимые события оказались не такими уж странными. В одном из них, на видео 2015 года, был запечатлен сферический объект, пролетающий мимо истребителя с невероятной скоростью. «О боже, чувак», — слышно, как говорит пилот на видео, смеясь. Но позже следователи установили, что ничего особенного там не было — каким бы ни был объект, ракурс камеры и относительная скорость истребителя создавали впечатление, что он движется намного быстрее, чем на самом деле. Вторая миссия управления оказалась более необычной: изучить исторические документы, начиная с 1945 года, чтобы оценить заявления десятков бывших военных служащих о том, что Вашингтон осуществлял секретную программу по сбору инопланетных технологий. Конгресс предоставил управлению беспрецедентный доступ к самым засекреченным программам Америки, чтобы команда Киркпатрика могла докопаться до истины. В ходе расследования Киркпатрик начал обнаруживать в Пентагоне лабиринт кривых зеркал, окутанный официальным и неофициальным прикрытием. С одной стороны, секретность была понятна. В конце концов, США десятилетиями вели экзистенциальную борьбу с Советским Союзом, и каждая сторона была полна решимости одержать верх в гонке за все более экзотическим оружием. Но Киркпатрик вскоре обнаружил, что некоторая одержимость секретностью граничила с фарсом. Бывший офицер ВВС был явно напуган, когда рассказал следователям Киркпатрика, что десятилетия назад его информировали о секретном инопланетном проекте и предупредили, что если он когда-либо повторит этот секрет, его могут посадить в тюрьму или казнить. Это утверждение повторяли следователям и другие мужчины, которые никогда не говорили об этом, даже со своими супругами. Оказалось, что свидетели стали жертвами странного ритуала посвящения. В течение десятилетий некоторым новым командирам самых засекреченных программ ВВС в рамках инструктажа при приеме на службу вручали листок бумаги с фотографией чего-то похожего на летающую тарелку. Этот аппарат описывался как антигравитационный маневрирующий аппарат.
Офицерам сообщили, что программа, к которой они присоединялись, получившая название «Янки Блю», была частью усилий по обратному проектированию технологий на летательном аппарате. Им было велено никогда больше об этом не упоминать. Многие так и не узнали, что это была фальшивка. Киркпатрик обнаружил, что эта практика началась за десятилетия до этого и, по-видимому, продолжается до сих пор. Весной 2023 года офис министра обороны разослал всем военнослужащим служебную записку с приказом немедленно прекратить эту практику, но ущерб уже был нанесен. Следователи до сих пор пытаются выяснить, почему офицеры вводили подчиненных в заблуждение: была ли это какая-то проверка на лояльность, более преднамеренная попытка обмана или что-то еще. После этого открытия 2023 года заместитель Киркпатрика проинформировал директора национальной разведки при президенте Джо Байдене, Эврил Хейнс, которая была потрясена. Могло ли это быть основанием для стойкого убеждения, что у США есть инопланетная программа, которую мы скрываем от американского народа? Хейнс хотела знать, по словам людей, знакомых с ситуацией. Насколько масштабной она была? — спросила она. Чиновник ответил: «Мэм, мы знаем, что это продолжалось десятилетиями. Речь идёт о сотнях и сотнях людей. Эти мужчины подписали соглашения о неразглашении. Они думали, что это всё по-настоящему». Это открытие могло иметь разрушительные последствия для ВВС. Военно-воздушные силы были особенно чувствительны к обвинениям в дедовщине и попросили AARO воздержаться от включения этого открытия в публичный отчёт, даже после того, как Киркпатрик проинформировал законодателей об этом инциденте. Киркпатрик ушёл в отставку до завершения и публикации этого отчёта. В заявлении представительница Министерства обороны признала, что AARO обнаружила доказательства поддельных секретных программных материалов, касающихся инопланетян, и проинформировала законодателей и сотрудников разведки. Представительница Сью Гоф заявила, что министерство не включило эту информацию в свой отчёт в прошлом году, поскольку расследование не было завершено, но рассчитывает предоставить её в другом отчёте, запланированном на конец этого года. «Департамент намерен выпустить второй том своего Отчета об исторических документах, в который войдут выводы AARO относительно сообщений о потенциальных розыгрышах и поддельных материалах», — сказал Гоф.

Киркпатрик расследовал еще одну загадку, которая тянулась на 60 лет назад. В 1967 году Роберт Салас, которому тогда было 84 года, был капитаном ВВС и сидел в бункере размером с гардеробную, управляя 10 ядерными ракетами в Монтане. Он был готов нанести апокалиптические удары, если бы Советская Россия когда-нибудь напала первой, и около 8 часов вечера ему позвонили с поста охраны наверху. Над главными воротами завис светящийся красновато-оранжевый овал, рассказал Салас следователям Киркпатрика. Охранники держали винтовки наготове, направив их на овальный объект, который, казалось, парил над воротами. В бункере раздался гудок, сигнализирующий о проблеме с системой управления: все 10 ракет были выведены из строя. Вскоре Салас узнал, что подобное событие произошло и в других шахтах поблизости. Были ли они атакованы? Салас так и не получил ответа. На следующее утро его ждал вертолет, чтобы забрать Саласа обратно на базу. Там ему приказали: никогда не обсуждать этот инцидент.
Салас был одним из пяти мужчин, опрошенных командой Киркпатрика, которые стали свидетелями подобных событий в 1960-х и 70-х годах. Несмотря на дань уважения, мужчины начали делиться своими историями в 90-х годах в книгах и документальных фильмах. Команда Киркпатрика углубилась в эту историю и обнаружила объяснение, связанное с Землей. Бетонные и стальные барьеры, окружавшие американские ядерные ракеты, были достаточно толстыми, чтобы дать им шанс на успех, если бы они первыми попали под советский удар. Но ученые того времени опасались, что мощный поток электромагнитных волн, генерируемый ядерным взрывом, может сделать оборудование, необходимое для нанесения ответного удара, непригодным для использования.
Для проверки этой уязвимости ВВС разработали экзотический электромагнитный генератор, имитирующий импульс разрушительной энергии без необходимости подрыва ядерного оружия. При активации это устройство, размещенное на переносной платформе на высоте 60 футов над объектом, накапливало энергию до тех пор, пока не начинало светиться, иногда ослепительно оранжевым светом. Затем оно испускало импульс энергии, напоминающий молнию.
Электромагнитные импульсы тянулись по кабелям, соединенным с бункером, где сидели командиры запуска, такие как Салас, нарушая системы наведения, выводя из строя оружие и преследуя этих людей до сих пор. Но любая публичная утечка информации об испытаниях в то время позволила бы России узнать, что ядерный арсенал Америки может быть выведен из строя первым ударом. Свидетелей держали в неведении. По сей день Салас считает, что он был участником межгалактической интервенции, направленной на предотвращение ядерной войны, которую правительство пыталось скрыть. Он отчасти прав. Этот опыт оставил восьмидесятилетнего человека глубоко скептически настроенным по отношению к американским военным и их способности говорить правду. «Происходит гигантское сокрытие информации не только со стороны ВВС, но и всех других федеральных ведомств, которые осведомлены об этом вопросе», — сказал он в интервью Journal. «Нас никогда не информировали о происходящих событиях, ВВС лишили нас какой-либо информации». Сокрытие правды от таких людей, как Салас, и целенаправленные попытки дезинформации, распространяемой внутри самого Пентагона, представляли собой опасную силу, которая с течением десятилетий стала практически неудержимой. Параноидальная мифология, распространению которой способствовали американские военные, теперь оказывает влияние на все большее число высокопоставленных чиновников, считающих себя ее приверженцами. Кризис достиг апогея из-за куска металла, отправленного ведущему ночной радиопередачи в 1996 году, который, по словам отправителя, якобы был частью разбившегося космического корабля.
Осторожно! Ссылка ведет на зарубежный сайт. Перейдя по ней можно случайно стать иноагентом.
первые сигнал был зарегистрирован гравитационно-волновыми обсерваториями LIGO и Virgo на удалении 1,3 млрд световых лет, что указало на слияние объектов с необычно малой массой — как у нейтронных звёзд.
Какое-то корявое предложение
Лучше было переводить оригинал с sciencedaily
Дело было так:
Астрономы гравитационно-волнового телескопа обнаружили сигналы из галактики за 1,3 млрд световых лет от нас. По характерным частотам они предположили, что произошло столкновение двух на редкость маленьких нейтронных звезд. А столкновение двух нейтронных звезд - это вам не жучий пук. Они сами маленькие, но масса - около массы нашего солнца. Их столкновение - это золото, свинец и прочие тяжелые элементы. Килоновая, чоужтам..
Астрономы сразу всем сообщили, что происходит столкновение. И астрозадроты со всего мира направили телескопы на этот объект. Но принимаемый спектр телескопов уже был самый разнообразный. И вот, когда быстро погасла первая характерная красная вспышка килоновой, все увидели остаточное синее свечение характерное для сверхновой.
Вот теперь все чешут репу. Предполагают, что сначала рванула сверхновая, но этого никто не заметил. В результате или образовались две маленьких нейтронных (теоретически возможно), или рядом уже была нейтронная звезда и они столкнулись. А это уже смог засечь гравитационно-волновой телескоп.
Короче: "Страшно, очень страшно. Мы не знаем, что это такое. Если бы знали, что это такое, но мы не знаем, что это такое."(с)
Читать тут
Для ЛЛ: Читайте последний абзац.
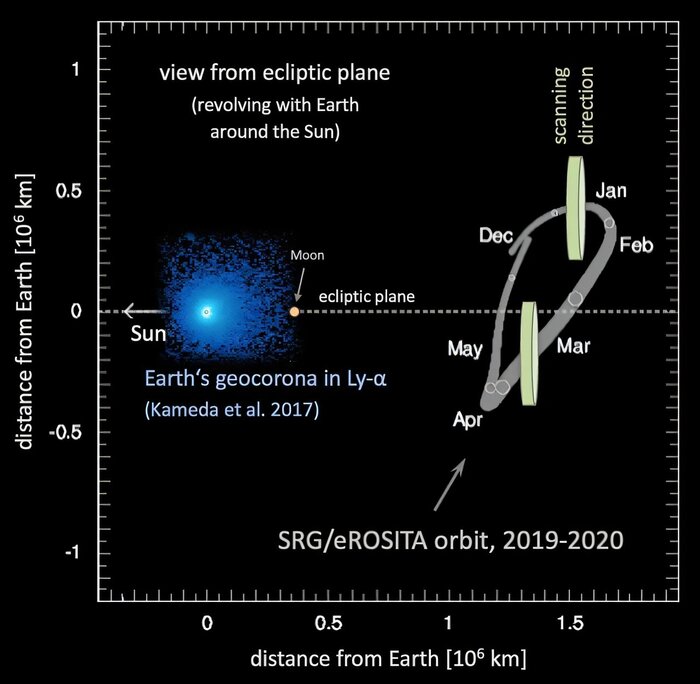
Ученые Института внеземной физики им. Макса Планка смогли отделить рентгеновское излучение, исходящее из нашей Солнечной системы, от аналогичного излучения, доходящего до нас из дальнего космоса, используя данные космического телескопа SRG/eROSITA. Четыре карты неба, полученные в период с 2019 по 2021 год с точки зрения наблюдателя, расположенной примерно в 1,5 миллионах километров от Земли — примерно в четыре раза дальше, чем расстояние до Луны, — позволили выделить излучение, связанное с обменом зарядами солнечного ветра (SWCX). Результаты исследования опубликованы в журнале Science .
Это достижение обеспечивает наиболее четкое на сегодняшний день изображение мягкого рентгеновского излучения неба (ниже 1 кэВ). Оно также переосмысливает свечение SWCX, ранее считавшееся просто помехой сигнала, как наблюдательный инструмент, позволяющий изучать содержание тяжелых ионов в солнечном ветре на всех широтах, его изменение в зависимости от солнечной активности и его взаимодействие с межзвездной средой.
Рентгеновское свечение возникает, когда сильно заряженные ионы солнечного ветра, такие как углерод и кислород, захватывают электроны у нейтральных атомов, присутствующих в верхних слоях атмосферы Земли (так называемая геокорона) и во всей Солнечной системе (гелиосфера). В результате возникает повсеместный фоновый сигнал, влияющий практически на все исследования диффузного мягкого рентгеновского излучения неба, от горячей плазмы, окружающей окрестности Солнца (Местный горячий пузырь) и гало нашей Галактики, до окраин далеких скоплений галактик, где он может искажать измерения температуры и плотности — ключевые данные для космологических моделей.
Поэтому точное определение свечения SWCX имеет решающее значение, и до сих пор это удавалось лишь частично.
Космический телескоп SRG/eROSITA обеспечил этот фундаментальный прогресс благодаря двум уникальным возможностям наблюдений. Во-первых, его уникальное расположение вблизи второй точки Лагранжа (L2) позволяет избежать рентгеновского излучения геокороны, которое влияло на предыдущие наблюдения. Во-вторых, он провел четыре полных обзора неба, охватывающих период от солнечного минимума до подъема солнечной активности, что позволило исследователям отслеживать изменения рентгеновского излучения на небе с течением времени.
Сравнивая наблюдения при различных уровнях солнечной активности, группа под руководством Конрада Деннерля выделила гелиосферную составляющую и реконструировала мягкое рентгеновское излучение неба таким, каким оно выглядело бы при наблюдении из-за пределов Солнечной системы. Однако достижения eROSITA выходят за рамки простого удаления помех: само излучение SWCX может быть использовано в качестве ценного сигнала.
Полученные данные демонстрируют четкую эволюцию рентгеновского излучения гелиосферы на протяжении солнечного цикла. Во время солнечного минимума излучение слабое и ограничено низкими широтами. По мере увеличения солнечной активности излучение усиливается и распространяется на более высокие широты. Это подтверждает данные более ранних измерений космических аппаратов: вблизи солнечного минимума должна существовать полярная дыра — область пониженного рентгеновского излучения на высоких широтах, вызванная менее ионизированным быстрым солнечным ветром, — которая затем постепенно закрывается.
«Это как наблюдать за тем, как Солнечная система дышит в рентгеновском диапазоне», — объясняет Габриэле Понти, который первым заметил изменяющееся во времени излучение в определенном участке неба.
Чем интересна новость:
Кто следит за новостями в группе Исследователи космоса сейчас проморгались, потрясли головой и перечитали новость заново.
Дело в том, что eROSITA установлен на российском космическом телескопе "Спектр-РГ" и является долей немецкого участия в этом комплексном инструменте исследований.
В 2022 году, в рамках введенных санкций, немецкая часть телескопа была отключена. В статье деликатно указано, что исследования проводились на основе наблюдений за 2019 по 2021 годы.
Второй спутник системы Starlink за последние три месяца превратился в космический мусор из-за нештатной ситуации на орбите. Информацию подтвердили в компании SpaceX.
Представители организации отметили, что спутник Starlink-34343 столкнулся с аномалией на орбите. Связь прервалась и так и не восстановилась. Запущенный в 2025 году аппарат находился на высоте 560 километров и вышел из строя. Этот аппарат запустили в составе Group 17-1 в мае прошлого года.
Мониторинговые компании после инцидента сообщили о наличии множества мелких обломков на месте работы спутника Starlink. Это говорит о разрушении аппарата.
SpaceX и LeoLabs констатировали, что случившееся не несет угрозы для работы Международной космической станции или запуска миссии «Артемида II». Точная причина инцидента не называется.
17 декабря 2025 года был похожий инцидент - так же взорвался один из спутников Starlink, что сопровождалось разбросом обломков на орбите.
Плотность объектов на орбите повышает вероятность возникновения «эффекта Кесслера», когда одно столкновение порождает цепную реакцию разрушений.
UPD:
- Компания LeoLabs провела наблюдение аппарата 34343 и обнаружила «десятки объектов» рядом с ним. Их основной вывод, что взрыв произошёл не вследствие внешнего воздействия, aka космического мусора, а некой аномалии внутри аппарата. Обломки, как и сам аппарат, сойдут с орбиты за считанные недели.
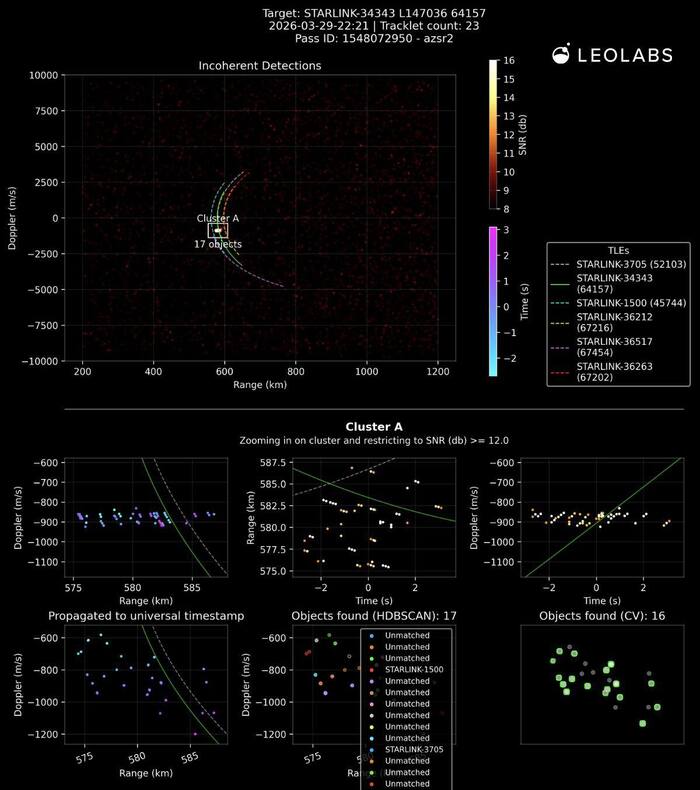
- s2a также опубликовали видео с самим аппаратом, на котором видна потеря ориентации.
- HEO собираются провести съёмки этого аппарата с орбиты. Они его фотографировали ещё 14 февраля этого года, но видимых повреждений не было.
Текущий консенсус, что эта авария очень напоминает аналогичную ситуацию в декабре прошлого года со Starlink 35956, который стал первым потерянным аппаратом этой группировки из-за «высокоэнергетической аномалии» (кхе-кхе прорыв ёмкости с аргоном). Ждём подробности от компании.
(с) Техасский вестник
На замену выходящих из строя 6 спутников, используемых для ТВ-вещания, до 2030 года потребуется 115 млрд руб. Заказать спутники должны в этом и следующем годах, но на их создание может потребоваться больше времени, чем планировали
От себя: Новость полугодовалая. Но тогда она не вызвала интереса. Сейчас, на фоне происходящего, она читается совсем иначе, если обратить внимание на ведомства и размер бюджета.

Как сообщил замглавы Минцифры Дмитрий Угнивенко, выступая на конференции Satcomrus в четверг, 2 октября, на создание шести спутников «Экспресс» в 2025–2030 годах планируют предусмотреть в бюджете 115 млрд руб., из которых 96 млрд руб. — на создание самих аппаратов, 19 млрд руб. — на страхование запусков и первого года работы на орбите.
Речь идет о спутниках, через которые осуществляется вещание обязательных телеканалов, доставка контента для телерадиокомпаний до наземных сетей и других услуг, в том числе спутникового телевидения «Триколор» и «НТВ Плюс». Всего до 2030 года оператор спутников «Экспресс» госпредприятие «Космическая связь» (ГПКС) должно заменить восемь спутников, чей срок службы на орбите заканчивается в ближайшие годы. Два спутника — «Экспресс-АМУ4» и «Экспресс-АТ3» — ГПКС создает за собственные средства. Их стоимость, по словам Угнивенко, составляет 30 млрд руб. Как говорили ранее в ГПКС, запуски этих аппаратов должны состояться в 2026 и 2029 годах соответственно. Еще четыре спутника («Экспресс-АМУ6», АМУ51, АМУ52, «Экспресс-40») по планам должны запустить в 2029 году, два (АТ4 и АМУ8) — в 2030-м. С учетом того что срок создания аппаратов составляет четыре года, конкурс на создание четырех спутников ГПКС должен объявить до конца этого года.
Угнивенко заявил, что для замены спутников «Экспресс» по решению правительства была создана межведомственная рабочая группа, куда вошли представители Минцифры, Минфина, «Роскосмоса», ГПКС и другие организации. Она должна будет определить сроки замены космических аппаратов, источники и механизмы финансирования. Он подчеркнул, что перенести задачу на более поздний срок не получится, поскольку в таком случае Россия потеряет орбитальные частотные позиции. «Поэтому своевременное производство и запуск космических аппаратов для нас крайне и крайне важен. Сдвиг сроков вправо в большинстве случаев недопустим», — указал Угнивенко. Также он напомнил, что предстоит решить проблему импортозамещения при создании космических аппаратов и наземной инфраструктуры — с начала 1990-х годов Россия создавала спутники, используя зарубежную полезную нагрузку (аппаратура и оборудование, ради которых запускается спутник: датчики, камеры, антенны, ретрансляторы и т.д.). Но после начала военной операции на Украине компании, которые поставляли ее, отказались от сотрудничества.

В бюджете этого года, а также в проекте бюджета на 2026–2028 годы деньги на спутники «Экспресс» не заложены. В проекте предусмотрены лишь средства на создание низкоорбитальной группировки «Бюро 1440», а также спутники «Экспресс-РВ» для оказания услуг в Арктике.
Представитель Минцифры сообщил РБК, что источник финансирования для создания шести спутников серии «Экспресс» «уже определен». «Сейчас Минцифры совместно с Минфином согласовывает механизм доведения средств в целях реализации мероприятия, — говорит представитель. — Поддерживать группировку «Экспресс» и запускать новые спутники на замену выходящим из строя необходимо, чтобы обеспечить надежную связь, телевещание и передачу данных на всей территории России, включая удаленные и труднодоступные районы. Это важно для решения различных задач, связанных с телекоммуникациями, телевещанием, а также с научными и другими важными проектами».
По словам главного редактора информационной группы Comnews Леонида Коника, завершение срока активного существования (САС) спутника не означает, что он сразу выйдет из строя — в теории аппарат может работать и далее. «Но на практике большинство отечественных космических аппаратов не дотянули даже до окончания САС», — отмечает он.
Коник напоминает, что с 2022 года АО «Решетнев», которое создает спутники связи, телевещания, ретрансляции и др., лишилось традиционного партнера по поставке полезных нагрузок — франко-итальянской фирмы Thales Alenia Space, после чего срок создания отечественных космических аппаратов существенно увеличился. «На изготовление первого такого спутника — «Экспресс-АМУ4» — уйдет не менее пяти лет, — оценивает эксперт. — При этом ресурсы АО «Решетнев», по моей информации, позволяют одновременно создавать не более двух геостационарных спутников. Получается, что даже если ГПКС закажет все семь спутников в начале 2026 года, к 2030-му будут готовы два-три». Контракт на создание «Экспресс-АМУ4» был подписан в середине 2022 года, его запуск запланирован на декабрь 2026 года, а ввод в эксплуатацию — на март 2027-го, говорил ранее глава ГПКС Алексей Волин.
По словам Коника, еще существуют риски на этапе запуска спутников — так как «старые ракеты «Протон», по сути, выведены из эксплуатации, а новая «Ангара» делает первые шаги на коммерческом рынке». «Все это говорит о том, что в 2029–2031 годах Россия может столкнуться с дефицитом емкости на геостационарных спутниках. В прошлом такие периоды уже были, и тогда государство временно разрешало российским пользователям арендовать емкость на иностранных комических аппаратах (прежде всего Eutelsat и SES)», — указывает главный редактор ComNews. В то же время он отмечает, что, если «Бюро 1440» развернет свою низкоорбитальную группировку в 2027–2029 годах, львиная доля спроса на спутниковый интернет перейдет к этой компании. «Геостационарные спутники обеспечивают и телевидение: и непосредственное спутниковое вещание, и перегон сигнала федерального ТВ по часовым поясам. Но эфирное телевидение во всем мире постепенно отмирает, переходя в интернет, поэтому через пять лет потребность в емкости на геостационарных спутниках может сильно сократиться», — допускает Коник.
Гендиректор международной организации космической связи «Интерспутник» Ксения Дроздова на конференции спросила Угнивенко, готово ли Минцифры разрешить российским спутниковым операторам использовать мощности зарубежных космических аппаратов, если с обновлением российской группировки возникнут проблемы, но замминистра не стал отвечать на этот вопрос.
Представитель «НТВ Плюс» сообщил, что оператор спутникового телевидения является арендатором емкостей, вопрос капитальных затрат на производство, запуск спутников «не значится в актуальной повестке» компании. Представитель «Триколора» отказался от комментариев.
«Задача по обеспечению бесперебойной работы спутникового телевидения — стратегически важная для государства, так что деньги на ее решение должны выделить, вопрос только, сколько времени это займет», — говорит еще один участник рынка спутниковой связи. По его словам, четыре года — это срок создания спутника с готовой полезной нагрузкой, а с учетом того что Россия лишена возможности закупать зарубежные комплектующие, он может увеличиться до шести лет.
На космодроме Байконур, который Россия арендует у Казахстана, завершаются последние приготовления к старту новейшей ракеты-носителя «Союз-5». Космическая ракета должна уйти в первый полёт 29 марта. Все проверки новой ракеты и стартового комплекса на Байконуре выполнены.

Казахское телеграфное агентство КазТАГ сообщило о последних операциях перед стартом ракеты «Союз-5». Так, технологический макет «Союза-5» 20 марта вечером был вывезен по железнодорожной ветке космодрома Байконур из монтажно-испытательного корпуса площадки №42 стартового комплекса «Байтерек» для установки в пусковое устройство площадки №45 этого же комплекса в вертикальном положении.
Этот так называемый «сухой» вывоз имитатора ракеты проводился в рамках испытаний, примерки транспортно-установочного агрегата, оборудования стартового комплекса и систем ракеты без заправки ракеты-носителя топливом.
«После окончания проверок макет с транспортно-установочным агрегатом возвращен в монтажно-испытательный корпус для заключительной подготовки к пуску. Проверки совместимости нового транспортно-установочного агрегата и оборудования пускового устройства прошли успешно», - сообщило КазТАГ.
Вывоз первого лётного изделия «Союз-5» на стартовый комплекс площадки №45 предварительно был назначен на 24 марта. Однако, по сообщению КазТАГ, это событие отложено на два дня. Причины не сообщаются.
А сам запуск ракеты-носителя «Союз-5» с макетом полезной нагрузки в рамках летных испытаний запланированный прежде на 27 марта, теперь намечен на 29 марта в 16.00 по времени Астаны (14:00 МСК).
В случае необходимости проведения дополнительных проверок и испытаний, запуск возможен в резервные дни - с 30 марта до 3 апреля, уточнил источник агентства.
По информации разработчика, «Союз-5» - перспективная двухступенчатая ракета-носитель среднего класса. Разрабатывается с целью обеспечения запусков автоматических космических аппаратов на солнечно-синхронные, высокоэллиптические, геопереходные и геостационарные орбиты, в том числе с использованием разгонного блока. «Союз-5» способен выводить на низкую опорную орбиту до 17 тонн полезного груза.
Диаметр блоков составляет 4,1 метра. В качестве маршевого двигателя первой ступени используется жидкостной ракетный двигатель РД171МВ. В качестве маршевого двигателя второй ступени используется жидкостной ракетный двигатель РД0124МС. Двигатели работают на топливной паре «жидкий кислород + нафтил».


