Пианино на адруино. Часть 1
Самые интересные проекты рождаются на стыке нескольких сфер (с) мой преподаватель из универа.
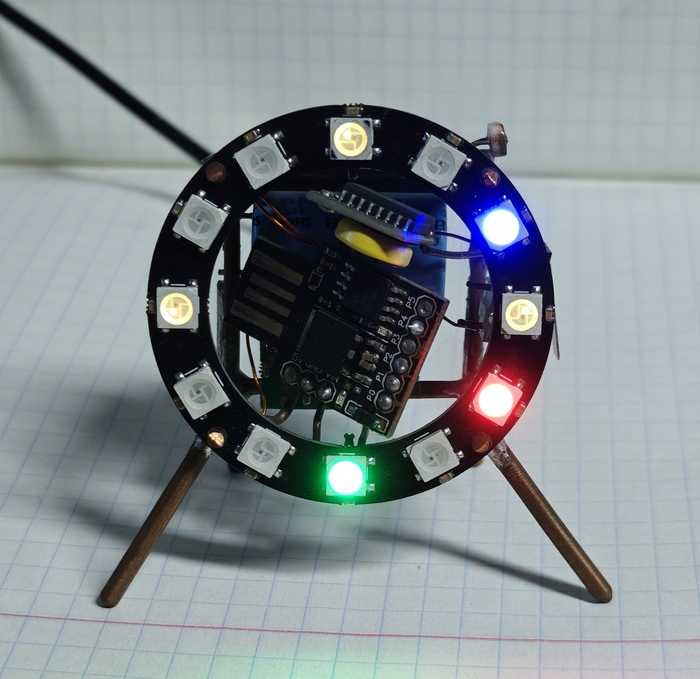
Однажды я увидел на ютубе замечательный номер, которым восхищен и по сей день.
Video bouncing ball piano - 1
Video bouncing ball piano - 2
Эта идея была на уровне мечтаний и долго пылилась в ящике, но совсем недавно наткнулся на нечто похожее в инстаграм (*запрещен на территории РФ)
видео 3:
видео 4:
Жонглировать я умею, и умею немного программировать. Поэтому решил изучить вопрос создания сего девайса или хотя бы прототипа.
Я связался с автором видео. Он из Чили и общаться с ним весьма сложно, т.к. анлийского он не знает. Но он был так добр, что скинул мне список оборудования, распиновку, 2 схемы и даже код на гитхабе.
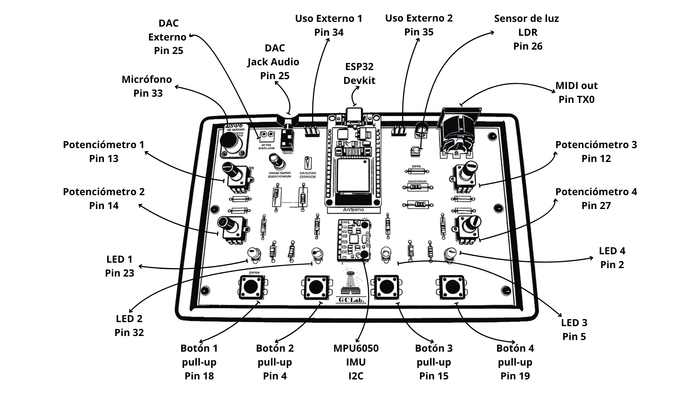
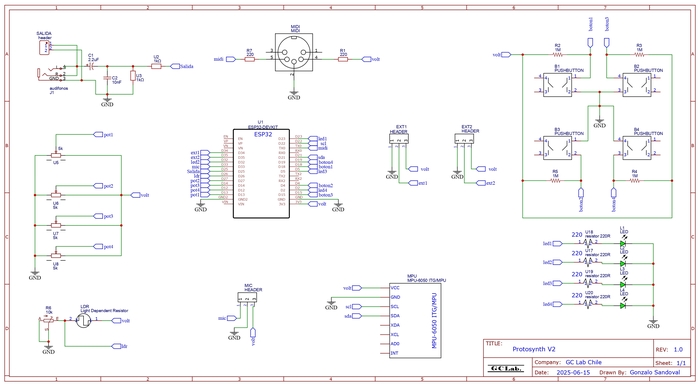
На первый взгляд это устройство вроде самодельного музыкального синтезатора. Проблема в том что я никак не связан со схемотехникой и adruino в частности, поэтому не очень понимаю отличие плат, резисторов и пр. Но если проект разделить на небольшие части и последовательно все собрать может чтото и выйдет. поэтому нуждаюсь пока в опытном взгляде. Может кто волокет за adruino и кому не в лом подсказать зачем нужна каждая деталь (если дал не правильные пояснения). Также хочу составил список по оборудованию для заказа с Ozon, подойдёт ли оно и комментарии (далее прилагаю название оборудования на испанском с переводом и моими размышлениями) :
I saw your list of materials, but it’s not entirely correct; Arduino is not used. I’ll make a materials list for you:
1) ESP32 (30 pins)
*тут все понятно. мозги проекта, главный контроллер (но на озоне очень много вариантов по запросу ESP32 . И не понятно какая зачем)
2) MPU6050
*хз зачем тут. вроде как отвечает за положение в пространстве, но вся конструкция будет статична.
3) 4 potentiometers, 1k ohms
предполагаю что это 4 потенциометра по 1 кОм
*для настройки параметров пианино (громкость, октава, эффекты и т.д.)
4) 6 resistors, 220 ohms
6 резисторов по 220 Ом
*нужны для ограничения тока через 4 светодиода и 2 компонента MIDI-выхода / аудиоцепи
5) 4 resistors, 1M
Резисторы 1 МОм
*Внешняя подтяжка (pull-up) для 4 кнопок (хуй знает что это такое)
6) 2 resistors, 1k
2 Резистора 1 кОм
MIDI-выход — для ограничения тока в MIDI-петле
Аудиовыход или защита — для фильтрации PWM-сигнала или защиты пина ESP32
7) 4 push buttons
тактовая кнопка
8) 4 LEDs
какая их функция не понятно
9) MIDI board connector
*Это гнездо которое впаивается в корпус синтезатора. В него ты втыкать MIDI-кабель, идущий к компьютеру (но я та копнимаю отсюда мне надо тольуо одно гнездо черное, оно же интерфейс)
10) Headphone jack
гнездо для джека на выбор несколько вариантов. предполагаю тот что с ножками подойдет.
11) MAX4466 microphone sensor
микрофонный модуль будет принимать звук отскакивания мячиков
12) 1 µF capacitor
Конденсатор 1мкФ на сколько вольт???
*разделительный конденсатор — убирает постоянную составляющую сигнала, чтобы на наушники не подавалось постоянное напряжение (это может повредить наушники или дать постоянный щелчок)
13) 103 capacitor
Керамический конденсатор0.01 µF (103)
так и не разобрался для чего он. тут нужна помощь

ну и Макетная плата❓, Провода dupont набор❓
В общем это пока все. Подскажите возможно ли это собрать и чтонибудь посоветуйте. Всем добра ✌️