Цифровизация – это реализация оккультного проекта из теневого мира, часть 1
Из кого состоит deep state и как далеко могут зайти эксперименты над человечеством.

«Теперь, когда появился интернет, гаджеты и соответствующие программы, вы из одной точки можете управлять громадной человеческой массой. Не только что-то им предлагая, но и формируя их мышление и сознание. Идеальный образ будущего для таких «проектировщиков» — человечество, в котором каждый снабжен гаджетом или компьютером и подключен к единому центру управления», — говорит ученый, кандидат исторических наук Ольга Четверикова.
О том, что такое мировой цифровой капитализм, почему ему не нужны живые люди, поклоняются ли западные элиты Сатане, какие задачи были решены с помощью пандемии коронавируса, кто проводит в России цифровизацию и почему было сорвано возрождение отечественной промышленности, Четверикова рассказала в интервью «БИЗНЕС Online».
«Понимаете, как это удобно — заменить человека роботом? Не требуется ровным счетом никакой социальной политики»
— Ольга Николаевна, в своих книгах и публичных выступлениях вы много говорите об угрозах цифровизации и наступлении тотальной цифровой диктатуры. Однако после начала специальной военной операции на Украине из России ушло множество IT-компаний и их филиалов, которые релоцировались на Запад и в республики бывшего СССР. Означает ли это, что в России замедлились или даже блокировались многие процессы, связанные с так называемой цифровой экономикой и цифровизацией нашей жизни? Или боевые действия кардинально не изменили прежнего вектора развития?
— Думаю, что никоим образом это не означает серьезных перемен. Ведь никаких признаков изменения глобального курса мы не видим. Более того, представители российской власти не устают подчеркивать, что цифровизация и искусственный интеллект (ИИ) остаются магистральным направлением нашего развития и без них не будет никакого прогресса. У нас строят «цифровую экономику», но для начала надо понять, что это такое.
Совсем недавно, летом прошлого года, нашему народу сказали, что у нас появляется новый нацпроект «Экономика данных» (рассчитан до 2030 года — прим. ред.), который заменит проект цифровой экономики. Простите, но словосочетание «цифровая экономика» как раз и является эвфемизмом «экономики данных». Во всех серьезных документах западных международных организаций и крупных финансовых центров используется именно этот термин. Почему? Потому что сегодня данные превратились в ключевой фактор производства и в основной товар. Их называют «золотом XXI века» и «нефтью XXI века». Как заявил на одном из круглых столов еще в 2018 году прежний замминистра цифрового развития Алексей Соколов, данные (в том числе и big data) получили статус экономической категории, они перешли в категорию активов и для крупнейших компаний являются основным активом и источником доходов. И это не просто слова, поскольку радикально меняется бизнес-модель капиталистической экономики и так называемые данные начинают играть в ней ведущую роль.
На самом деле все очень просто, если мы будем рассматривать происходящее с политэкономической точки зрения (чего у нас, кстати, всячески избегают). Хотя именно политэкономия является той самой наукой, которая способна нам объяснить, что же происходит сегодня в мире. В настоящее время капитализм меняет форму и бизнес-модель, но при этом суть его остается прежней. Мы знаем, что суть капиталистического производства — это получение прибыли и сверхприбыли. Если старая бизнес-модель больше этого не обеспечивает (а при империализме, как мы знаем, крупнейшие монополистические корпорации живут за счет извлечения сверхприбылей, а не за счет обычной прибыли), то эта модель меняется. Поскольку наши власти определили для России капиталистический способ производства, да и в принципе капиталистический образ жизни во всех сферах, то, естественно, сверхприбыль и у нас рассматривается в качестве конечной и главной цели.
Помнится, когда РФ переходила на рельсы цифровой экономики, а это 2016 год, то это было сделано очень резко и быстро, народу толком даже ничего не объяснили. Просто сказали, что без цифровой экономики дальше существовать невозможно, что искусственный интеллект — это наш приоритет и он должен находиться в центре национальной жизни. Тот, кто его не создаст, обязательно проиграет, а тот, кто создаст, выиграет и «выйдет в дамки». При этом нам не объяснили, на основе каких документов и разработок утверждается эта программа.
Потом, когда позже мы начали выяснять подробности, выяснилось, что в основе лежала программа Всемирного банка — причем по созданию не только цифровой экономики, но и цифрового государства. Всплыли документы вроде «Государство как платформа» (ГкП), «Государственные цифровые платформы» (ГЦП) и многое другое. В основных западных документах, на основе которых это все осуществлялось, откровенно говорится, что сегодня цифровизация проводится именно в силу того, что «большие данные», big data, становятся главным товаром, поэтому о каждом человеке надо знать абсолютно все. Приватность и неприкосновенность частной жизни фактически упраздняются. Та компания, которая получает о человеке максимальное количество данных, в итоге и выигрывает на рынке.
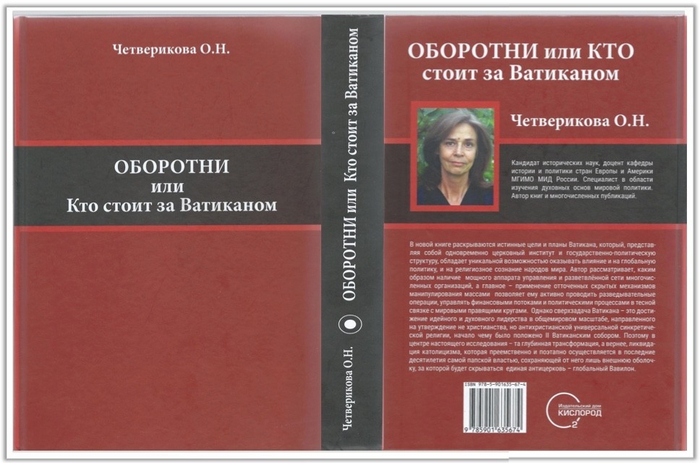
Выпускница МГИМО, религиовед и обличитель трансгуманизма: кто такая Ольга Четверикова
Ольга Николаевна Четверикова (родилась в 1959 году) — выпускница МГИМО (1983), кандидат исторических наук, доцент кафедры истории и политики стран Европы и Америки МГИМО. В настоящее время доцент Московского финансово-юридического университета. Автор монографии «Религия и политика в современной Европе», книг «Цифровой тоталитаризм», «Разрушение будущего», «Диктатура просвещенных: дух и цели трансгуманизма», «Оборотни, или Кто стоит за Ватиканом», «Трансгуманизм в российском образовании», а также многих научных и публицистических статей.
Область научных интересов: основы и эволюция европейского религиозного сознания, Римско-католическая церковь в европейской геополитике, этнические и религиозные конфликты в Западной Европе в конце XX – начале XXI века, финансовые механизмы европейской политики Новейшего времени, религиозно-финансовые аспекты глобализации, новые религиозные движения и корпоративная религия.
Так вот, этой новой бизнес-моделью и является цифровая платформа. А что делает цифровая платформа? Она убирает из системы экономических, общественных и государственных отношений всех посредников, чтобы минимизировать издержки. В сфере коммерции убираются продавцы и привычные нам рыночные отношения, и происходит переход на цифровую торговлю. Платформа идет во все сферы: в государственное управление, на производство, в образование, здравоохранение и так далее. Кто посредники в государственном управлении? Чиновники. Значит, переходя на цифровую платформу, убирают чиновников. Кто посредники в образовании? Учителя. Значит, убирают фигуру учителя и переводят всех на онлайн-образование. Кто посредники в медицине и здравоохранении, кто мешает прогрессу? Врачи. Значит, убирают врачей и развивают цифровое здравоохранение. И так во всех остальных сферах.
Но что же делать с людьми? Если их вытесняют из процесса производства и иных сфер, фактически выкидывают на улицу, то как же с ними поступить? В этом случае остается два пути: либо сокращение населения (о чем члены Римского клуба, как известно, размышляли еще в 1972 году в докладе «Пределы роста»), либо перевод большей части людей на так называемый безусловный базовый доход для того, чтобы иметь резервную армию труда, которую можно будет подключать к делу в случае необходимости (например, если в противном случае возникнет угроза властям социальными волнениями и прочими проблемами).
Когда говорят о цифровизации, как-то забывают, что она ведет не только к увеличению числа работников высококвалифицированного труда, которые смогут управлять сложными машинами, но и к образованию огромной армии неквалифицированной и очень дешевой рабочей силы. Речь в том числе идет о тех, кто станет передавать от пункта А в пункт Б товары, заказанные в коммерческой торговле. Нетрудно догадаться, что я говорю о курьерах. Именно поэтому их число сейчас растет в геометрической прогрессии. И складывается впечатление, что практически все «лишнее человечество» решили записать в курьеры.
— Уточните, пожалуйста, что такое базовый доход в данном случае. Минимальная потребительская корзина?
— Да, это идея введения ежемесячного минимального гарантированного дохода для малоимущих. Появилась она в силу того, что изменяется социальная структура общества и появляется новый растущий класс, которому английский экономист Гай Стэндинг даже придумал название «прекариат» (от французского précaire — «ненадежный» и слова «пролетариат» — прим. ред.). Это класс людей с наиболее низкими доходами, не имеющих никакой гарантии занятости, вынужденных постоянно менять место работы, занятых неполный рабочий день на сезонной работе или в теневом секторе. Положение таких людей не позволяет им обеспечить свою экономическую и социальную независимость. Стэндинг включает сюда три категории людей: одна вышла из пролетариата, но эти люди никогда не достигнут того, что имели их родители; другая — это мигранты, а третья состоит из образованной дипломированной молодежи, которая не может найти достойную работу. Все три группы объединяет чувство неуверенности, обусловленное неопределенностью их положения, ограниченным доступом к социальным выплатам, фактическим отсутствием социальной поддержки и каких-либо перспектив.

Положение прекариата делает его крайне опасным для властей. Он не имеет никакой гарантии занятости и вынужден постоянно менять виды работы. Он не может рассчитывать на государственную помощь, пенсионное обеспечение, отпуск, пособия по безработице, больничные и оплату медицинских счетов. В еще более тяжелом положении находятся те, кто работает в теневой экономике, то есть без трудового договора, не входя в юридические отношения со своим работодателем. Отсюда идея базового дохода, который поможет держать этих людей в состоянии минимальной обеспеченности, не позволяющей привести ситуацию к социальным конфликтам и общественным взрывам.
С давних времен известна формула Карла Маркса, в которой он раскрыл суть капиталистической эксплуатации человека человеком. Я сейчас говорю не о марксизме в целом, который в советское время использовался как метод исследования абсолютно всех сфер жизни общества, что, на мой взгляд, неправильно и неверно. Однако если мы станем рассматривать именно эксплуатацию, то лучше Маркса никто не показал ее сути. Так вот, знаменитая марксистская формула стоимости товара c + v + m = W, где c — это основной капитал, v — переменный капитал, а m — прибавочная стоимость, свидетельствует нам, что получаемая прибыль тем больше, чем меньше издержки. Поэтому главная задача капиталиста — минимизировать издержки. А переменный капитал олицетворяет собой рабочую силу, ее покупку и социальное обеспечение. Так вот, все это капиталист стремится минимизировать. Раньше эти величины сокращали до предельно возможного уровня, а сейчас решили подойти к делу более радикально — просто убрать переменный капитал и заменить его роботом. Понимаете, как это удобно? Это не требует ровным счетом никакой социальной политики!
Таким образом, марксистская формула наглядно объясняет нам, почему заказчикам «цифрового капитализма» так насущно требуется ИИ и совсем не нужен человек. Искусственный интеллект — это, по сути, не переменный, а основной капитал. Если человек выводится из всех сфер производства и вытесняется роботизированной техникой, то издержки минимизируются настолько, что практически не оставляют от переменного капитала камня на камне. И если в России вслед за переходом к капитализму, осуществленным в 1991 году, внедряется цифровая экономика, то это означает одно: расчеловечивание экономики. Коли уж нас поставили на капиталистические рельсы, то и экономическая, и технологическая, и социальная политика будут определяться логикой капиталистического развития, что неизбежно ведет к переходу на новую бизнес-модель.
«Самые смелые проекты — беспроводное управление мозгом людей»
— А какое наименование можно дать нынешней разновидности капитализма? Все, что мы слышали от Маркса и Ленина, сводилось к империализму как высшей стадии капитализма. Но это было еще во время Первой мировой войны…
— На Западе этот термин уже достаточно устоялся — «мировой цифровой капитализм». А цифровая платформа рассматривается просто как капиталистическая ячейка или, как назвал ее методолог Щедровицкий, в качестве «клетки» новой промышленной революции. Раньше подобную роль играли классические транснациональные корпорации. Однако у глобальных корпораций — децентрализованное существование, у них разные циклы и силы производственного процесса, распределенные по разным странам. А перед современными хозяевами капитала стоит задача объединить все это посредством единого мозгового центра, который может находиться где угодно, поскольку они постоянно перемещаются по миру. Это, кстати, очень хорошо показано во французском фильме «Тысяча миллиардов долларов», который вышел на экраны еще в 1982 году. Картина впервые в истории мирового кинематографа продемонстрировала, как функционируют транснациональные корпорации. У них нет родины, постоянной точки опоры, и вообще они вне привычных нам границ, в том числе географических и административных. Зато новым словом, которое приносит с собой цифровой капитализм, становится вычеркивание самих людей, ведь все осуществляется на цифровых платформах или где-то в виртуальном «облаке». Человек, принимающий участие в таком процессе, может находиться в любом месте, принадлежать к любой национальности и при этом входить в большую цифровую корпорацию. География и вопросы крови не имеют больше никакого значения, поскольку все переводится в онлайн.

Под воздействием этого все остальные сферы человеческой деятельности тоже начинают претерпевать модификацию. Меняется даже само международное право. Старое международное право, как известно, исходит из того, что существуют границы, национальный суверенитет и государства. Его объектом являются международные и межгосударственные отношения. Если же все границы стираются, а любая информация и любая идея могут передаваться онлайн, то в чем должен заключаться суверенитет?
— То есть когда у нас замглавы совета безопасности РФ Дмитрий Медведев повторяет известные слова «у России нет границ», то это у него таким образом сказывается его прежнее увлечение гаджетами и высокими технологиями? Если что, это была шутка…
— Это, возможно, шутка, но это, безусловно, так. И в книгах основателя Давосского форума Клауса Шваба, и в трудах американского социального философа и экономиста Джереми Рифкина, в частности в «Третьей промышленной революции» (у нас эту книгу почему-то замалчивают, хотя она вышла несколько раньше, чем швабовские сочинения о «четвертой промышленной революции» и «великом обнулении»), пишется об одном и том же: о процессе внедрения новых высоких технологий, которые меняют абсолютно все, включая саму суть человека. Причем и Рифкин, и Шваб считают изменение самого человека самым главным. Меняется человеческий менталитет, и такое понятие, как «суверенитет», из него просто исчезает. Поэтому именно государства страдают в наибольшей степени от провозглашаемых перемен. Они передают свои функции либо на глобальный уровень, либо на локальный. Появляются новые, более сильные, нежели государство, субъекты — частные компании и корпорации. Они вытесняют прежние государственные структуры, в то время как государство приобретает сетевую форму управления. Рифкин открыто пишет, что глобальное управление станет осуществляться не посредством условной, иерархической вертикали, а именно на сетевом уровне — над глобальным сетевым обществом. Идеи, им излагаемые, полностью вписываются в программу экологического устойчивого развития ООН, разработанную мозговыми центрами оккультно-пантеистического движения нью-эйдж (New Age — новая эра — совокупность мистических и эзотерических учений, распространившихся в западной цивилизации начиная с 1980-х годов, — прим. ред.), Рифкин использует тот же язык, те же понятия. Особое внимание он уделяет тому, как будет меняться система образования, чтобы обеспечить формирование глобально мыслящего гражданина. Он утверждает, что изменение научных представлений привело к новому пониманию планеты и представлению о биосфере как «живом организме» и что люди начинают «расширять свое видение и мыслить как граждане мира в общей биосфере». «Глобальные сети по правам человека, глобальные сети здравоохранения, глобальные сети пострадавших от катастроф, глобальное хранилище генетических материалов, глобальные банки продовольствия, глобальные информационные сети, глобальные природоохранные сети, глобальные сети по защите животных являются очевидными признаками исторического перехода от традиционной геополитики к биосферной политике». «Когда люди начнут делиться „зеленой“ энергией в континентальных экосистемах и считать себя гражданами континентальных политических союзов, чувство принадлежности к более широкой общности, скорее всего, приведет к постепенной переориентации с геополитики на более всеобъемлющую биосферную политику». Таковы их планы.

Между прочим, сам по себе Джереми Рифкин — очень важная фигура, и в современном Европейском Союзе он играет весьма заметную роль. Как многие американцы, он сын эмигрантов, причем выходцев из России. Просто о нем у нас очень мало говорят и пишут, хотя именно он реально делает нынешнюю глобальную цифровизацию, в том числе в сфере международного права.
— Когда вы говорите о прекариате и высококвалифицированном слое специалистов, то в каком процентном соотношении друг к другу они должны находиться? В том же, в каком «золотой миллиард» по отношению к остальному человечеству?
— Конечно, все это связано. Но мы ведь с вами рассуждаем не в русле точных наук — это все не более чем прогнозы. Правда, прогнозы, которые постепенно превращаются в планы и проекты, а затем начинают сбываться. Но дело ведь в не том, что для этого есть какие-то объективные предпосылки и законы, и нам, хочешь не хочешь, надо к ним приспосабливаться. Мы имеем дело с форсайт-проектами, которые не являются прогнозированием на основе реальности. Напротив, их придумывают как раз для того, чтобы формировать новую реальность (или «новую нормальность»), чтобы направить развитие в нужном кому-то русле. К примеру, нет никакой объективной необходимости осуществлять биоцифровую конвергенцию и встраивать в мозг человека чипы. Какие законы эволюции или экономики могли бы продиктовать нам что-либо подобное? Эти «хотелки» всего лишь исходят из определенной картины мира, из чьего-то конкретного видения. Причем это видение возникло еще в 1980-е и 1990-е годы. Тогда ряд наблюдателей пришел к выводу, что минимальное удовлетворение базовых потребностей людей уже достигнуто, а значит, оно больше не способно обеспечить капиталистам получение сверхприбылей. Соответственно, надо искать в человеке такие потребности, которые помогут достигнуть желаемого результата, а если этих потребностей нет, их надо придумать, породить, спровоцировать их появление. Если раньше было так: «У человека есть потребность, и мы ее удовлетворяем», то теперь все переиначили: «Мы сначала создаем у человека искусственные потребности, а затем их удовлетворяем». На этом держится вся виртуальная экономика.

Причем мы создаем для человека полностью виртуальный мир. Достаточно надеть очки виртуальной реальности, и человеку уже не нужно будет путешествовать, ходить в театры и музеи, общаться и так далее. Надев очки, он и так все это получит. Но, самое главное, все это превосходно согласуется с проектами, которые изначально разрабатывались в мозговых центрах транснациональных корпораций. А эти центры, в свою очередь, тесно связаны с различного рода тайными эзотерическими обществами, которые создавались на протяжении многих веков. Таким образом, это реализация оккультного проекта, долгое время существовавшего в недрах теневого, закрытого мира. Его цель, если говорить простыми словами, — контролировать большие массы людей из одной точки. Раньше это было крайне сложно, поскольку средства управления человеком оставались на крайне примитивном уровне. Зато теперь, когда появился интернет, гаджеты и соответствующие программы, вы и в самом деле из одной точки можете управлять громадной человеческой массой. Не только что-то им предлагая, но и формируя их мышление и сознание. Это и есть «Нейронет» — интерфейс-мозг-компьютер. Идеальный образ будущего для таких «проектировщиков» — человечество, в котором каждый снабжен гаджетом или компьютером и подключен к единому центру управления. Ты вставляешь туда определенную программу, и люди начинают одинаково мыслить. Но еще важнее — заставить их одинаково чувствовать. Дальше этого идут проекты еще более смелые: к примеру беспроводное управление мозгом людей.
Таким образом, цифровизация, о которой мы говорим, в конечном счете дает элите возможность не просто контролировать людей, но и управлять ими. А поскольку большими людскими массами управлять трудно, было бы неплохо, с точки зрения «проектировщиков», их сократить за счет программы сокращения населения.
Конечно, я считаю, что их проекты чудовищны и античеловечны. Помните, когда в июле 2016 года в Альпах открывался Сен-Готардский железнодорожный туннель, соединивший Швейцарию и Италию (длина составила 57 км — прим. ред.), каким странным театрализованным представлением это сопровождалось? Там присутствовали лидеры западной элиты, президенты Германии, Италии, Франции и Швейцарии. Но фактически это было страшное действо, поскольку оно было инсценировано с явными оккультными мотивами, с поклонением Бафомету (аллегорической фигуре, чаще всего изображаемой в виде козла и считающейся демоном, — прим. ред.) и т. д. Если до этого кто-то рефлексировал на тему того, что представляет собой западный мир, то после открытия Сен-Готардского туннеля этот вопрос для большинства был снят. Театрализованная церемония наглядно показала, кому и чему поклоняются западные элиты.
Однако любая история делается людьми, это не объективный процесс, и мы никогда не знаем, к какому финалу придем. Мы никогда не знаем наверняка, что произойдет в конкретном обществе, какая личность выдвинется на первый план и какая группа людей готова будет воспринять ту или иную идею. Недаром говорится: человек предполагает, а Бог располагает. Всегда что-то идет не так, как задумали «проектировщики», что-то элементарно ломается или появляется новый фактор, способный полностью изменить ситуацию. Так и с планами элиты относительно цифровизации. Поэтому одно дело — прогнозы, а другое — их реализация. «Проектировщики» прекрасно понимают, что в какой-то момент их замыслы могут сорваться, и поэтому всегда готовят на этот случай запасные планы. Случись какой-нибудь природный катаклизм, как, к примеру, землетрясение в Турции в феврале прошлого года, и все сразу меняется. Скажем, к моменту землетрясения Турция уже была фактически на грани возрождения Османской империи, но после стихийного бедствия ее политика была откорректирована.
«Вместо реиндустриализации в РФ решили провести цифровизацию»
— Какова роль России в процессе перехода к цифровому капитализму? Нашу страну часто называют экспериментальной площадкой для отработки высоких технологий, так же, как Индию или Китай. Это верно? Но как же тогда быть с российскими чиновниками? У нас традиционно очень большой бюрократический аппарат, который неплохо кормится со своих мест. Неужели они согласны с тем, что их, как лишних посредников, могут обнулить?
— Когда мы говорим «Россия», мы обобщаем, мы говорим о всех наших гражданах. Между тем курс на цифровизацию определяет довольно узкая группа людей, связанных с государственными или частными корпорациями. Это тот самый класс, который сформировался в период перестройки. Хотя история этого социального слоя уходит еще глубже в прошлое: это и теневой бизнес, действовавший в СССР, это и коррумпированная часть советского государственного и партийного аппарата, и коррумпированная часть КГБ. Все они в определенный момент объединились. А до середины 1980-х годов это движение было подспудным, закладывались его основы. Об этом уже достаточно много и подробно написано, выпущено множество книг и исследований. А тогда, после крушения СССР, для нас было откровением, когда кто-то заявлял, что все это готовилось заранее, еще с 1970-х годов.
Так вот, эти люди, находясь внутри еще советского общества, сделали ставку на встраивание в глобальную систему управления со всеми ее «прелестями»: капиталистической экономикой, ущербной социальной политикой и своеобразной системой образования. В связи с этим советская система образования получила, как мне кажется, первый удар: новые стандарты там начали внедряться уже в конце 1980-х годов. Более того, «перестройщики» не раз подчеркивали, что без изменения менталитета бывших советских людей ничего не получится — поэтому первым дело следует реформировать образование, причем главным образом гуманитарное. В связи с этим в процессе реформ ключевую роль сыграл Джордж Сорос. Тогдашний министр образования Эдуард Днепров, вышедший из среды «инноваторов» (был главой министерства с июля 1990-го по декабрь 1992 года — прим. ред.), подчеркивал, что внешний фактор стал тут решающим.
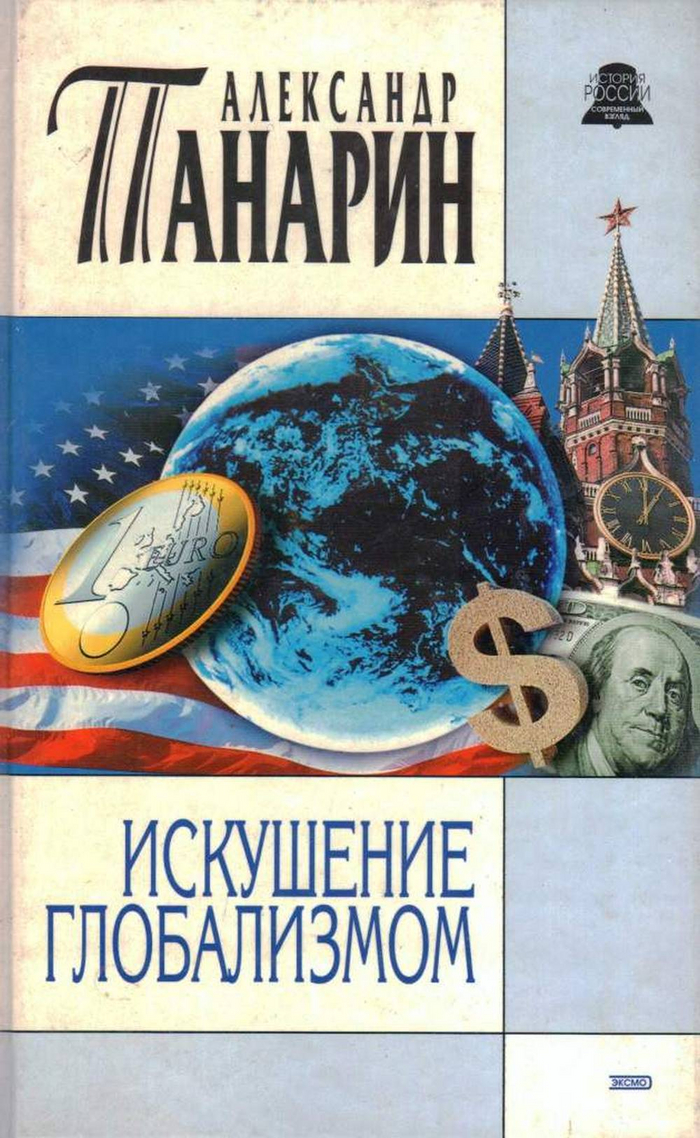
Таким образом, определенные силы внутри СССР успешно решили задачу по возвращению страны к капиталистической модели, но на том уровне, на котором эта модель в тот момент находилась. В связи с этим я всегда вспоминаю нашего замечательного философа Александра Панарина, который в 2002 году издал книгу «Искушение глобализмом». В этом труде он очень четко разобрал современные ему реалии. К примеру, он писал, что ограбление народа, то есть приватизация, будет осуществляться в два этапа. Первый этап — это ограбление самого народа как такового и формирование на местах локальных капиталистических элит. А второй этап будет уже непосредственно касаться ограбления сформировавшихся национальных элит, чьими руками был осуществлен первый этап. Поэтому, когда началась специальная военная операция, мы увидели, что активы российских олигархов, размещенные за рубежом, в оффшорных и прочих закрытых зонах, начинают замораживаться. Таким образом глобалисты приступили ко второму этапу. При этом мы должны помнить, что изначально эти активы вовсе не собственность олигархов, изначально это народные деньги и богатства, присвоенные «приватизаторами». А сейчас эти средства второй раз отняли, как и предупреждал в свое время Александр Панарин.
Когда нам сегодня рассказывают об идущей в стране «национализации», мы, к сожалению, видим, что в реальности происходит простое перераспределение активов, предприятий и собственности из одних частных рук в другие, из «неправильных» в «правильные». Но дело даже не в этом, а в том, что цифровизация — это сегодня магистральная капиталистическая линия. Если уж вы идете по этому пути, то тогда обязательно придете к необходимости все оцифровывать, поскольку, как я уже сказала, цифровизация — это не просто использование высоких технологий, а новая бизнес-модель, к которой движется большой капиталистический мир. Если у вас цели и задачи благие, если вы идете по социально ответственному пути, если ваша экономика народная и прочее, то тогда цифровизация — это и в самом деле просто новые интересные технологии, которые будут использоваться для повышения качества жизни людей и увеличения производительности труда. Это совершенно другое, нежели тот искаженный антиутопический мир, о возможности которого я говорю. Поэтому никто не выступает против цифровизации как таковой. Однако если вы выбираете капиталистический путь, то цифровизация превращается во всепоглощающую бизнес-модель и вам надлежит оцифровывать буквально все что движется. Специалисты называют цифровую платформу новой подрывной инновацией. Она подрывает конкурентоспособность старых продуктов в силу того, что прежние параметры конкурентной борьбы теряют своё значение и происходит изменение соотношения ресурсов и ценностей на рынке. По мере укрепления своих позиций за счет расширения предлагаемых услуг IT-компании поглощают конкурентов, лоббируют политиков и устанавливают стратегические партнерские отношения с традиционными ТНК. Они ведут себя все более агрессивно, навязывая свою бизнес-модель как безальтернативную. Как утверждает основательница крупнейшей в мире каршеринговой компании «ЗипКар Робин Чейз»: «Все, что может быть платформой, станет платформой. Это настолько невероятно убедительно: „платформенные“ компании растут быстрее, учатся быстрее, быстрее адаптируются и так далее. Если вы не сделаете платформу, кто-то другой вас опередит». В конечном счете это ведет к оцифровке самого человека. Отсюда появляются концепции биоцифровой конвергенции, в России это такие программы, как «Нейронет» (должна заменить собой Web 3.0 в 2030–2040-х годах) и различные генетические исследования, которые фактически позволяют программировать самого человека. Но самое главное — контролировать мозг и сознание, и с этим непосредственно связан «Нейронет».
В связи с этим хочу вернуться к тому, как у нас начинал осуществляться переход к цифровизации. Еще до того как в 2016 году у нас заявили о цифровой экономике, в России по распоряжению правительства была разработана программа «Национальная технологическая инициатива» (НТИ) при поддержке агентства стратегических инициатив (АСИ) и Российской венчурной компании (РВК). Этот проект недостаточно широко освещался, но между тем он очень важен. Помните, когда в 2014 году на Украине начались печальные события и к России стали применять первые санкции, разумеется, не такие суровые, как сейчас, перед страной встал вопрос о необходимости провести импортозамещение? Именно тогда заговорили о необходимости реиндустриализации в РФ.