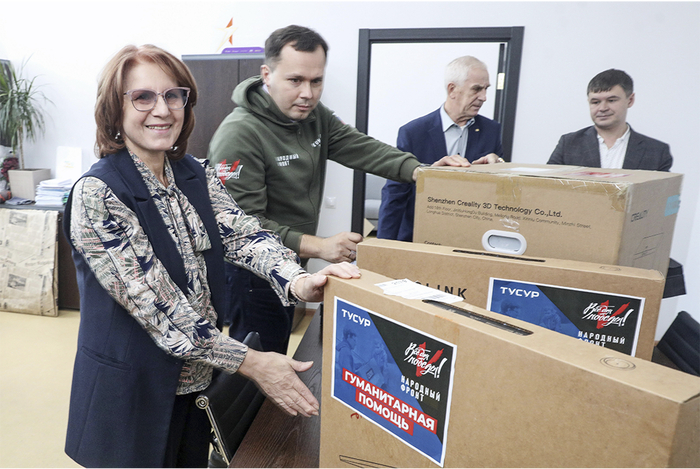
Сотрудники и студенты Томского госуниверситета систем управления и радиоэлектроники совместно с региональным отделением Народного фронта подготовили для отправки участникам специальной военной операции новую партию гуманитарного груза.
ТУСУР оказывает систематическую поддержку участникам спецоперации. На этот раз региональному отделению Народного фронта для отправки груза по просьбе бойцов СВО были переданы 3D-принтеры для печати деталей к дронам и боеприпасам, а также комплекты оборудования для обеспечения связи.
По словам советника при ректорате по комплексным вопросам функционирования университета Юрия Шурыгина, данная партия – лишь часть гуманитарного груза. Всего сотрудниками вуза были собраны средства в размере 2 миллионов рублей на приобретение необходимой техники для бойцов СВО.
ТУСУР ведет работу по сбору помощи бойцам СВО совместно с Народным фронтом на постоянной основе. Ранее в этом году была закуплена партия специальных средств, включая рации, детекторы дронов, бензиновые генераторы, автономные отопители, радиостанции и другую необходимую технику.
Активное участие в работе по сбору гуманитарной помощи принимают студенты университета: участники патриотического клуба «Я горжусь!», активисты Движения Первых ТУСУРа.
Жители города Усолье-Сибирское (Иркутская область) 1 июня сообщили об атаке БПЛА. Это первая атака беспилотников на Сибирь, сообщил губернатор региона Игорь Кобзев.
Днем в воскресенье в телеграм-каналах появилась информация и видео от очевидцев о летящих дронах в Иркутской области. Местные жители засняли полет нескольких БПЛА, а также взрывы и пожар.
Губернатор Иркутской области Игорь Кобзев подтвердил атаку дронов на регион. Он назвал ее первой в Сибири. Беспилотники били по военной базе в поселке Средний в Усольском районе.
Доброго времени суток, на связи главный инженер проекта - Илья. В данной статье я расскажу о трудностях, с которыми мы встретились на пути создания «Проекта Д». Статья затронет временной промежуток создания дирижабля от зарождения идеи до сентября 2024 года.
Зарождение идеи
Данная часть текста является продолжением прошлой статьи, так что если вдруг вы не читали её, настоятельно рекомендую с ней ознакомиться: ТЫК
Идея создания дирижабля у меня возникла ещё несколько лет назад. Однако, тогда у меня не хватало навыков и знаний, я был молод и глуп (сейчас тоже, но немного поменьше). И вот, весной 2024 года, я решил, что нужное время наступило. Начать работу было решено с продумывания общего концепта БПЛА. А продумывать было что! Изначально я рассчитывал сделать совершенно другой дирижабль, нежели текущий «проект Д». Первая версия должна была быть высотным дирижаблем – носителем малых дронов, одновременно являющимся мощным ретранслятором сигнала. Именно из-за требования мощного сигнала, я решил изучить проектирование антенн, посчитав данную тему простой в изучении. Как же я заблуждался :)
Антенны и переквалификация
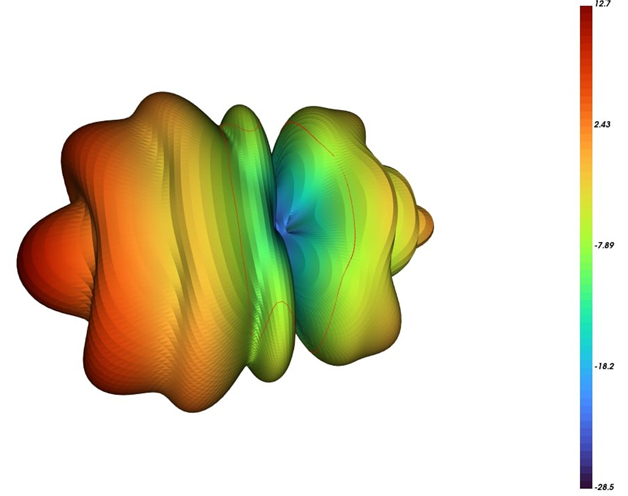
Чтобы научиться проектировать антенны, я потратил около месяца. Я даже добился некоторых результатов:
(распространение сигнала в разные стороны от антенны, где красный – хороший сигнал, синий - всё очень плохо)
Я пробовал многие вариации антенн, тестировал разные частоты. И даже что-то получалось. Это был неплохой результат для человека, только недавно узнавшего о принципах работы радиосвязи, но меня он мало устраивал. Потратив ещё некоторое количество времени, я попытался сделать опытный образец. Когда сборка была закончена, я собрал все свои остатки нейронов и решил… отказаться от идеи использования самодельных антенн и вообще решил пересмотреть концепт всего беспилотника. В результате мозгового штурма, было решено переквалифицировать дрон в сферу гражданских доставок небольших грузов.
Вторая жизнь проекта и поворотный механизм
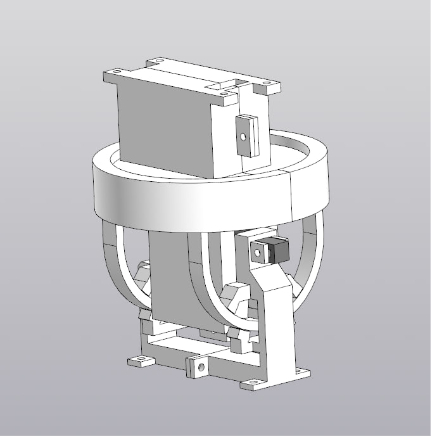
После переработки концепта, я начал проектировать поворотный механизм камеры (Далее ПовМех). Первая версия механизма вышла довольно странной и громоздкой, так как я пытался сместить центры тяжести, чтобы максимально разгрузить сервоприводы.
(Вот он – монстр. Выглядит ужасно, не правда ли?)
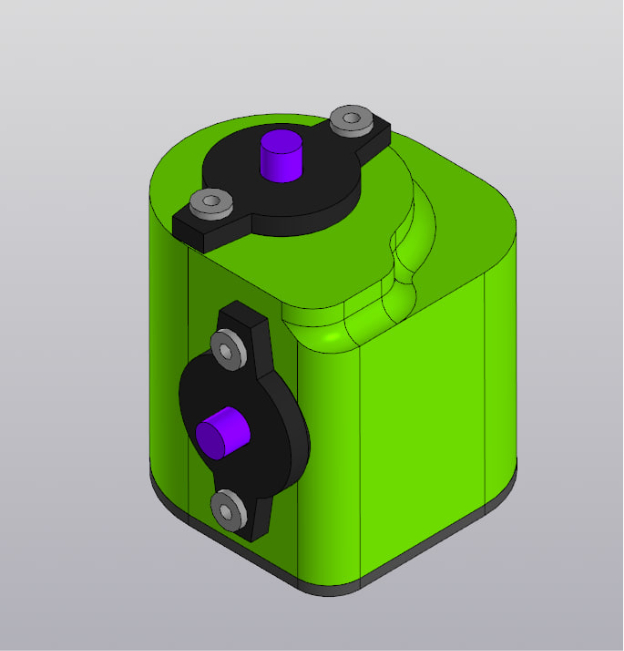
ПовМех 1 мне не понравился – он был тяжёлым, шумел, заедал. Поэтому я потратил ещё некоторое время, чтобы перемоделировать его в нечто более визуально приятное. Так появился ПовМех 2:
(ПовМех 2. Фото собранного в реальности лежит в нашем телеграмм канале. Ссылочка будет в конце статьи)
ПовМех 2 устроил меня гораздо больше. Он меньше первой версии более чем в два раза, а также тише и продуманней. Собран ПовМех 2 был относительно недавно – в сентябре. Но если вы подумали, что на этом путь поворотного механизма завершён, то вы ошибаетесь. На данный момент планируется спроектировать третью версию, в которой мы исправим все недочёты второй версии, а главное которая будет более компактной.
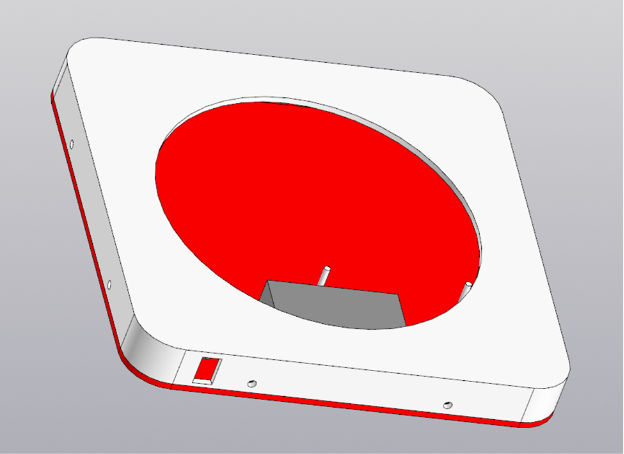
Посадочная платформа?
Ну а что тут сказать – посадочная платформа и точка.
(на фото один из ранних набросков площадки без верхней крышки. Размеры 20 на 20 см)
Площадку будет обнаруживать специальный алгоритм камеры дирижабля над точкой назначения, после чего аккуратно опускать груз максимально близко к площадке.
Общее виденье проекта
В прошлой статье мы не сказали, каким планируется «Проект Д». Поэтому я отвечу здесь.
Это будет гибрид квадрокоптера и дирижабля длиной около 8-12 метров. Масса полезной нагрузки сильно зависит от используемых материалов, но планируется не менее 20-25 кг. Запас хода – минимум 50 км. Потолок высоты – около 1000 метров. Ориентировочная себестоимость 250-350 тыс. руб.
Будет разработано две версии: Первая – один тестовый дирижабль, где газовый баллон с гелием будет уменьшен в угоду удешевления производства для отработки технологий и навыков. (Полезная нагрузка околонулевая) Вторая – полноценный продукт, все статьи и расчёты будут ориентированы на него.
Важно понимать, что проект находится на ранней стадии развития. Многое будет переработано и пересмотрено
Послесловие
Благодарю вас за прочтение данной статьи! В этот раз я не указывал точные технические данные в угоду более лёгкой читаемости текста. Однако, если вы хотите больше цифр, напишите об этом в комментариях, и тогда в следующий раз я распишу больше о разных узлах БПЛА. В октябре мы сделали много всего, поэтому следующий текст явно будет содержать больше интересного контента. Если вы являетесь специалистом дирижаблестроения или подобной сферы, убедительная просьба не бросаться палками. Если же вы готовы дать нам совет – мы будем вам крайне признательны.
На данный момент связаться с нашей командой возможно через:
«Человек, который верит в сказку, однажды в неё попадает, потому что у него есть сердце…» - Сергей Павлович Королёв
Доброго времени суток. Если ты читаешь данную статью, значит тебя заинтересовала наша идея дирижабля под кодовым названием "проект Д". А может тебя заинтриговал только заголовок? Мы в целом не против. Будем честны, на это и был расчет. Данный текст разделён на несколько частей для удобства чтения. Они сюжетно независимы, так что если какая-то часть покажется скучной - её можно смело пропускать.
С чего всё началось?
Однажды мы задумались:почему человечество почти не использует дирижабли? В наше время они выполняют лишь функции больших экранов с рекламой, да ещё пару не особо значимых вещей. Несомненно, они обладают своими значительными недостатками, но ведь у них есть и свои плюсы. Главное преимущество данного вида транспорта – по сути неограниченная дальность, а это в условиях современной России с её размерами уже звучит заманчиво. Именно с этой мысли и зародилась идея разработки БПЛА под кодовым названием “проект «Д»”. Устройство такого беспилотника максимально простое - баллон с некоторым летучим газом, да различная электроника для автономного полёта из точки А в точку Б.
Целью нашей команды стало создание дрона, который стал бы гибридом квадрокоптера и дирижабля. Он должен одновременно ликвидировать недостатки этих двух летательных аппаратов, и при этом иметь плюсы от обоих. В теории данный беспилотник будет способен совершать полёты в несколько десятков километров, чтобы доставлять небольшие посылки и грузы в отдалённые населённые пункты. И всё это при относительно небольшой себестоимости полёта! (чтобы теперь даже в самой отдалённой деревне можно было заказать Сет Калифорния и пару бургеров).
Летающая вундервафля, которая везёт роллы в Магадан). Рисунок нейросети
Кто мы?
Далее в нескольких абзацах мы представимся и кратко расскажем о своей роли в проекте. Первым о себе расскажет тот, с чьей шальной мысли и начался "Проект Д".
Меня зовут Южаков Илья. Я инженер-конструктор в нашей команде. Проектирование различных узлов БПЛА, технические расчёты, подбор материалов и оценка примерных затрат - это всё по моей части. В реальности получаю образование инженера-конструктора жидкостных ракетных двигателей. К текущему времени мною собраны и протестированы уже несколько узлов дирижабля (однако в каждом есть замечания, которые нужно править). Теперь о себе расскажет наш гений искусственого интеллекта и повелитель кода)))
Меня зовут Всеволод Олегович, в данном проекте я исполняю роль главного (и единственного на данный момент) программиста в команде. Создание ПО, программирование микрокомпьютеров и систем искусственного интеллекта - это моя настоящая и будущая работа. Тут нет трогательной истории, что я загорелся этой идеей, потому что я за экологию и хочу что бы ПВЗ маркетплейсов открылись у белых медведей на северном полюсе. Все проще, я заинтересовался проектом, так как решил что он интересный, сложный, но нам более чем под силу, плюс он хорошо подходит как дипломная работа. На данный момент получаю образование .NET программиста, основной язык - c#, но так же есть знания в py, c++, js и разных языках разметки, ну и турбопаскаль с кумиром)))
На момент написания этого текста я занимаюсь ПО Sokol, что это/зачем это/как это работает я отвечу в отдельной статье. Я думаю в этой статье чувствуется разный стиль написания, так как мы писали ее на пару вдвоем. Дальше такого не будет. Статьи про дирижабль будет писать Илья, статьи общего характера как эта и статьи про Sokol - пишу я, Всеволод Олегович.
Итог
Благодарю за прочтение данной статьи. Надеюсь вам понравилась наша идея и вы впредь будете за ней следить.
И помните – мы здесь лишь для того, чтобы делать вундервафли реальностью!
По мере появления аудитории и увеличения заинтересованности людей к нашему проекту, мы создадим аккаунт на бусти или схожем сервисе.
На данный момент вы можете с нами связаться здесь: Почта - sevaTeti@yandex.ru Телеграмм канал, где мы показываем прогресс работы
На переднем плане справа - вершина Стажёров, левее неё в ущелье простирается ледник Большой Актру. На заднем плане гора Актуру - пик высотой 4044 м. Одна из основных вершин Северо-Чуйского горного хребта.
Так выглядят саянские горы. Такие близкие и одновременно малодоступные. Погода тут переменчивая: Солнце сменяет ливень, а после тайга начинает "дышать". Здесь в полной мере ощущаешь масштаб и красоту саянских просторов.
"Москва" - одна из самых простых больших горных вершин Восточного Саяна, на которую можно подняться. Простая и доступная, конечно, относительно. Чтобы добраться до этих мест надо доехать до п.Кошурниково, а потом уйти вглубь тайги на 50км. И это сложные 50 километров. Дорога вытрясет из вас всю душу. Ее когда-то прокладывали золотари и лесорубы и о людях на легковушках, конечно, не думали. Но сам факт, что она есть есть - замечательно. Ведь иначе даже до этих крайних саянских вершин было бы не добраться.
На Москве нет троп, поэтому вы вольны выбирать сами, куда идти. Полная свобода действий. Это дикие места. Здесь непроходимая тайга и куча медведей. Но вооружившись картой, навигатором, фальшфайером и смелостью можно зайти очень далеко. Однако рассчитывать здесь надо только на себя и своих напарников. Поэтому к восхождению подходите серьезно. От дороги до верха набор высоты около 1200м, а по протяженности по самому короткому пути - по прямой ~20км.
Кстати, по пути на Москву можно еще заехать на Чинжебский водопад.