

Желе и шреддер
Звук!
Оригинальное видео: https://youtu.be/1g29IUe1IL0, там много чего другого бросают в шреддер.
Показать полностью
Звук!
Оригинальное видео: https://youtu.be/1g29IUe1IL0, там много чего другого бросают в шреддер.
Сообщество о сборке, настройке, полётах на самодельных квадрокоптерах: как гоночных, так и "обычных".
Ранее мной были созданы два поста на тему гоночных квадрокоптеров.
Первый — видео отличного пилотирования гоночного квадрика: http://pikabu.ru/story/_4269234
Второй — первая часть небольшой серии постов про то, как такие квадрокоптеры устроены: http://pikabu.ru/story/_4282060
Многим Пикабушникам данная тема показалась очень интересна: в комментариях разрослись целые обсуждения: компонентов, рам, всевозможной электроники. Также возникло очень много вопросов, на которые мы старались ответить, дать совет.
Тема весьма интереса. И я думаю, что такое сообщество будет пользоваться некой популярностью. К тому же я советовался с Пикабушниками всё в тех же комментариях — меня поддержали.
P.S.: уже есть сообщество http://pikabu.ru/community/quadrocopter, однако по тематике постов оно несколько отличается от нашей задумки: тут больше идёт речь о готовых квадриках, о чём свидетельствуют тэги: DJI Phantom, DJI Inspire.

Здравствуйте!
После того, как я опубликовал видео пилота FinalGlideAus, вопросы про гоночные квадрокоптеры просто таки посыпались.
Я постарался ответить на все, но ещё пообещал сделать пост о том, как же эти маленькие проворные негодяи устроены.
Обещал — делаю!
В первой части мы рассмотрим рамы, моторы, регуляторы скорости и пропеллеры. Во второй части я расскажу про полётные контроллеры. Третью часть хотелось бы посвятить FPV-оборудованию, а в четвёртой я расскажу про LiPo-аккумуляторы.

Ты наверняка видел на YouTube (да и тут, на Пикабу) видео, где маленькие дроны несутся на бешеных скоростях сквозь деревья, окна разрушенных зданий и колонны парковок. И ты наверняка задавался вопросом, как же эти квадрики устроены.
Пришло время приоткрыть завесу тайны!
Если вдруг у тебя в процессе прочтения поста возникнут какие-то вопросы — не стесняйся, задавай. Я с удовольствием постараюсь тебе на них ответить :)
По сути, в устройстве квадрокоптера нет ничего сложного. Он состоит из таких основных элементов:
• Рама
• Моторы
• Пропеллеры
• Регуляторы скорости
• Полетный контроллер
• Аккумулятор
• Приёмник радиоуправления (и его антенна)
Есть такое направление полётов, когда пилот видит то, что “видит” его квадрокоптер. Такая штука в RC-хобби называется FPV (First-person view). Она требует некоторых своих независимых компонентов, а именно:
• Камеры
• Передатичка видеосигнала
• Приёмника видеосигнала
• Видео-очков/виде-шлема или монитора
Давайте детально рассмотрим анатомию гоночного квадрокоптера. Чтобы ты смог лучше ориентироваться, я сделал небольшую схему, где постарался отделить основные компоненты квадрика. Их мы сегодня и рассмотрим.
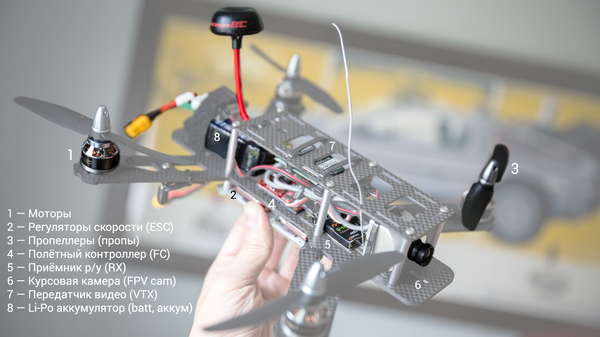
0. Рама
Основа всего. Поэтому я и отметил данный пункт цифрой "0".
В гоночных квадрокоптерах используются рамы 280-130 размера.
Что такое "размер рамы"? Это расстояние в миллиметрах между осями двух противоположных моторов. Соответственно, рама 250 размера будет иметь диагональное расстояние между осями моторов в 250мм.
Сейчас особо популярны так называемые "мелколёты" — квадрики на раме 180 размера и меньше. Такие квадрики очень лёгкие, и, как следствие, нужно намного меньше мощности для поднятия их в воздух. В следствие чего уменьшается вес моторов и аккумулятора.
Материалы рамы:
В гоночном коптеростроении фигурируют четыре основных материала: карбон, стекловолокно, алюминий и нейлон.
Рамы, в основном делают из первых двух: карбона или стекловолокна. Основное отличие между ними в прочности и, соответственно, цене — карбоновые рамы прочнее и дороже. Есть также комбинированные рамы, где некоторые детали выполнены выполнены из более прочного карбона, а всё остальное — стекловолокно.
Вторые два материала (алюминий и нейлон) используются для изготовления проставок и стоек для рамы. Разница, очевидно, в весе — нейлон намного легче. Однако нейлон может погнуться или вовсе сломаться.
Наиболее популярные рамы на данный момент:
Lumenier QAV280/QAV250/QAV210/QAV180, ImpulseRC Alien 5", ZMR250, Lantian LT-130, а также их всевозможные китайские реплики и модификации.

1. Моторы
В хобби радиоуправляемых моделей на электрической тяге используются бесколлекторные (БК) электродвигатели. Гоночные квадрики — не исключение.
Основное отличие БК-моторов от коллекторных в отсутствии щёток, поэтому их ещё иногда называют "бесщёточными".
Просто так их крутиться не заставишь — нет понятия "плюс" и "минус". На выходе три провода, а для управления таким двигателем нужен контроллер, который называется "ESC".
Принцип работы БК-моторов — попеременное включение обмоток двигателя, что создаёт магнитную силу и притягивает к обмоткам постоянные магниты, расположенные на внешнем корпусе двигателя, тем самым вращая его.
Основные характеристики моторов:
• Напряжение питания. Указывается в "баночном эквиваленте" — количестве банок LiPo-аккумулятора, которые сможет "переварить" мотор. Одна банка — 3.7 вольт.
• KV-число. Количество оборотов на вольт. Чем выше этот параметр у моторов — тем более резким получится квадрокоптер. Типичные числа для гоночных квадрокоптеров — 2000-2400KV.
• Максимальный ток.
На гоночных квадрокоптерах используют моторы типоразмеров 1806-2206. Такие маленькие моторчики (размер всего 27*14мм, вес — 26 грамм) способны выдавать колоссальную мощность в 500 Вт и тягу до 1100 грамм на один мотор. Обороты тоже не менее колоссальны: 32000 об/м.
Наиболее популярные моторы:
DYS BE1806 2300KV, Emax RS2205 2300KV (Racing Edition), Cobra CM-2204/28 23KV, Lumenier RX2206 2350KV.

2. Регуляторы скорости (ESC)
Немного отступим от нумерации, потому что этот пункт связан с моторами намного теснее, чем пункт про пропеллеры.
Регулятор скорости (ESC, Electronic Speed Controller) — устройство, регулирующее обороты и, как следствие, мощность двигателя. Представляет из себя плату с силовыми транзисторами, микроконтроллером и его обвязкой.
Основной задачей ESC является коммутация подаваемого напряжения таким образом, чтобы заставить ротор вращаться. Регулятору нужно определить положение ротора (благодаря эффекту Холла) и переключать напряжение на обмотках двигателя таким образом, чтобы ротор вращался. Это полноценный микрокомпьютер.
Основными характеристиками ESC есть:
• Максимальный коммутируемый ток.
• Максимальное напряжение (в "баночном" эквиваленте)
• Тип процессора и его частота
• Наличие и характеристика BEC-а
• Прошивка регулятора.
Если с первыми двумя пунктами всё понятно, то с процессором, BEC-ом и прошивкой не всё так однозначно. Давайте разбираться.
Первые регуляторы скорости управлялись чипами компании ATMEL: как правило, ATMega8. Современные же, "топовые", регуляторы начали делать на базе процессоров SiLabs: они попросту быстрее, что на таких оборотах несомненно идёт на пользу — регулятор способен быстрее коммутировать нагрузку и реагировать на изменение обстановки.
BEC — встроенный стабилизатор напряжения для питания бортового оборудования квадрокоптера (например, полётного контроллера). Имеет напряжение 5V и ток до 2A. Топовые регуляторы, как правило, им не оснащаются. Сам же регулятор питается сам от себя.
Прошивка ESC — программа, управляющая всеми функциями регулятора. Помимо того, что она должна быстро реагировать на изменение сигнала от полетного контроллера, молниеносно меняя скорость вращения двигателя, современные прошивки обладают рядом интересных возможностей:
• Активное торможение. Если просто уменьшить ток, подаваемый на моторчик, он по инерции некоторое время ещё будет крутиться на прежней скорости, постепенно сбрасывая её до заданной. На гоночных квадриках с молниеносной реакцией это не нужно. Поэтому контроллер попросту притормаживает ротор, некоторое время подавая ток только на одну обмотку. Электромагнитная сила притягивает постоянные магниты ротора, и он сбрасывает обороты намного быстрее.
• Изменение направления вращения двигателя "на лету". Таким образом можно летать вверх ногами. А почему бы и нет? Используется для 3D-пилотажа.
• Поддержка протокола Oneshot125. Это когда полётный контроллер не посылает PWM-сигнал постоянно, а посылает команду управления ESC только тогда, когда нужно изменить обороты двигателя.

Наиболее популярные прошивки: BLHeli и SimonK Firmware.
Наиболее популярные регуляторы скорости: KISS 12A/20A (BLHeli), DYS BL20A (BLHeli)/DYS SN20A (SimonK), FVT LittleBee.

3. Пропеллеры
То, что создаёт подъёмную силу. То, благодаря чему квадрокоптер и летает.
Изготавливают их из нейлона, из композита (стекловолокно и пластик) и из карбона. Последние самые прочные, но не самые лучшие по лётным характеристикам (большой вес и проблемы с балансировкой).
Пропеллеры — расходный материал. Практически каждое падение заканчивается сломанным пропеллером. Часто, даже не одним.
Имеют три основные характеристики: материал, размер и угол атаки. Если с материалом всё понятно, то с размером и углом атаки не очень.
Размер: длина от края до края пропеллера в дюймах. Угол атаки — угол, под которым плоскость лопастей пропеллера наклонена относительно поверхности.
Записываются эти характеристики так: 5x4.5 (проп размером 5 дюймов и углом атаки 4.5), или так: 6030 (проп размером 6 дюймов и углом атаки 3).
Больше размер — больше тяга, но также больше нагрузка на двигатель. Соответственно, чем больше пропеллер, тем более мощный двигатель нужен. Больше угол атаки — больший объём воздуха выталкивает пропеллер, но опять-таки, больше нагрузка. Переборщите с нагрузкой — сгорит сначала двигатель, а потом и регулятор.
Также большие пропеллеры несовместимы с большими оборотами — пропеллер более 7 дюймов на моторе 2300KV просто сломается.
В гоночных квадрокоптерах используются пропеллеры 4030, 4045, 5030, 5045, 6030 и даже 6045. Из производителей стоит отметить Gemfan и HQProps.
Например, мотор Cobra CM-2204/28 2300KV с пропеллером 6х4.5 (6045) на аккумуляторе 4S (14.8в) на максимальных оборотах выдаёт мощность 480Вт, тягу более 1 кг и "жрёт" 30А.
Также сейчас популярны пропеллеры типа "Bullnose" — со срезанными окончаниями. Это уменьшает вихревые потоки и увеличивает эффективность.

На сегодня всё. Спасибо большое всем, кто дочитал пост до конца.
Если у вас есть какие-то вопросы — смело задавайте их в комментариях, я постараюсь на них ответить.
Также буду рад любой критике поста и прислушаюсь ко всем советам.
С уважением.

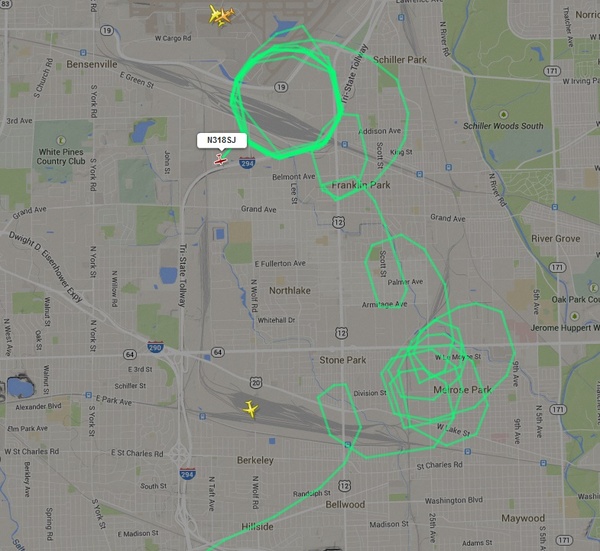
Слева вверху можно увидеть фрагмент Международного Аэропорта О'Хара (KORD).
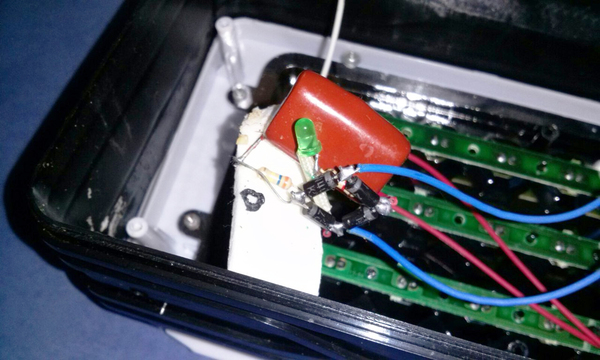
На китайском фонарике из светодиодов (матрица 3 на 12 светодиодов) гнездо зарядки упало внутрь корпуса. Пришлось разобрать, чтобы прикрутить на место. Внутри я увидел чудо китайской инженерной мысли.
Синие провода идут прямо к гнезду зарядки, а там вилка на 220 вольт. И вот это всё болтается на двухстороннем скотче, приклеенное к корпусу.
Теперь я боюсь это заряжать.

