Всем привет! Хочу рассказать позитивную историю о международной гарантии производителя Creality (делает 3д принтеры).
К сожалению пост не реклама ник реалити ни алихе.. а знаете где еще нет рекламы? Конечно же в многопользовательской .. тьфу ты блин.
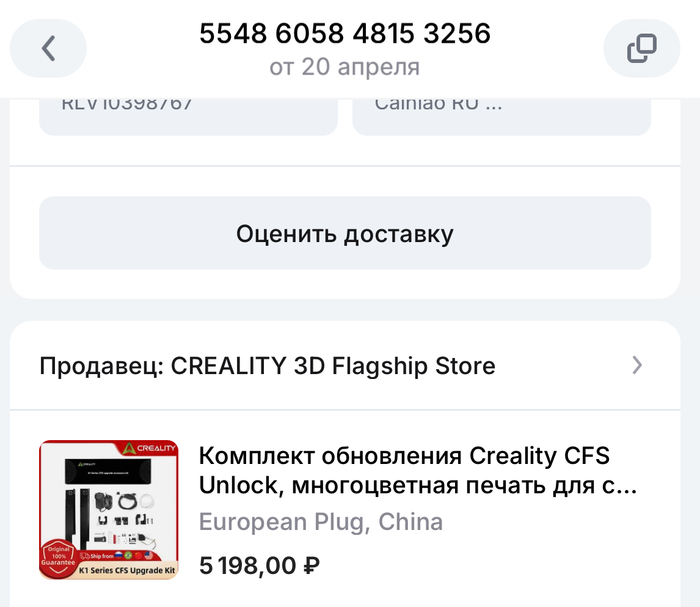
Предыстория: Есть их принтер K1, самый первы, купленный пару лет назад. В прошлом апреле покупается для него комплект CFS (чтобы печатать многоцветные модельки). И вот, проработав несколько месяцев, а в реальности пару десятков часов сходит с ума датчик прутика (пластика). Выдает ошибку и глючит. Любые методы ремонта не помогают. Значит сломался.
Комплект покупался на Aliexpress, но появляется идея все ще написать письмо в поддержку напрямую. Просим chatgpt помочь со структурой и переводом. Я особо не надеялся ни на что, так как проблема ни у кого не решилась ни одним подручным методом.
Получаем в ответ "пришлите фото-видео и попробуйте вот такие действия". И просят прислать пруфу по тому, что я реально купил сей апгрейд.
Отвечаем + пруф в виде скрина с алихи.
Тут набор тестов, натяжение ремня, видео демонстрация проблемы.
пруф заказа.
Через день получаем ответ, что таки это гарантия и сейчас мы все разрулим через продавьца на Ali.
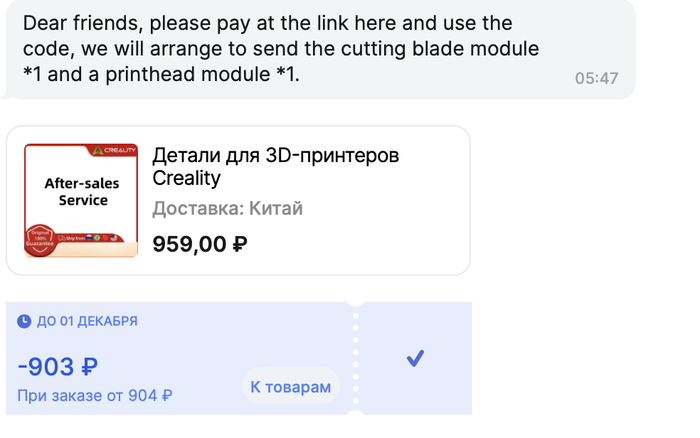
Это было очень удивительно, что никто не говорил что я криворукий и сам что-то сломал, не предлагал 100 бесполезных советов лишь бы я сдался и отстал. Два письма и ... на Aliexpress мне написал продавец. Что ему пришлют запчасть и он вышлет ее мне. И вот, он сделал специальный лот для меня и дал скидочный купон, чтобы стоимость была очень условной (стоимость доставки).
Собственно, все это заняло три часа моего времени, немного подняло цены на оперативную память (из-за Chatgpt) и получил очередной позитивный опыт от коммуникации с иностранными компаниями. Хотя были и противоположные ощущения, к примеру от производителя бытовой техники Caso, который послал меня нахер когда их топовые сувид умер через месяц использования по причине "ой, вы его опускали в воду, конденсат попал на плату - вы виноваты".
Расскажу подробнее про мою постройку, цены и технические детали, раз вопросы в комментариях возникли. Пусть будет ответом на ответ на пост.
Но сначала подпишитесь на мой телеграмм канал.. бла бла бла
Начну с видео. Оно не полевое, так как времени не было снять с улицы, добавлю потом видео именно с покатушек по грязи/холмам.
Для понимания происходящего: VR тем Oculus Quest 3 в режиме "сквозная камера", я вижу что происходит вокруг и в "воздухе" у меня весит экран на который выводится картинка с камеры на машинке. Можно сделать fullscreen как на любых FPV очках, но мне нравится так больше. Размер экрана можно менять на любой удобный.
Абзац предистории: начиналось это хобби в далеком 2003 году, началось с калильный машинок (двигатель на нитрометаноле), потом были и бензиновые масштаба 1:5, теперь только электронный, чтобы жена не выгнала из дома =) были в Самолеты, и вертолеты, потом появились FPV дроны для гонок, потом дроны концерна Калашников... но это уже по работе.
На фото "мои пиздюки" из мира RC
Теперь про сет конвертика и что почему:
1) Шлем VR - 60к почему ок? Он был для игрушек и фильмов в поездках. Ну и оценить VR порно тоже было прям необходимо.
2)Машинка. У меня их две она выбор - погонять или поползать. Поползать Traxxass Summit 1/8 масштаб и HPI Baja Flux 1/5 масштаб. - На фото Summit - 30-40к бу
3)Пульт Radiolink rc8gs - 8к - с али
4)Камера Runcam Wifilink 2 - это камера, приемник и передатчик + Wifi приемник - 5к с али (по скидочке)
5)подвес caddaxfpv gm-3 - 10к с али
6)2 батареи lipo - 10к (4к бу)
7)Head Traking esp32 - 1к на все.
Вот такой сетап. Все еще дешевле Нивы в состоянии в котором можно на ней ехать в грязь =)
Теперь технические моменты (буду упрощать, уж извините эксперты):
Почему wifilink? Есть несколько типов передачи видео сигнала с камеры на шлем: Аналоговый, Цифровой, Цифровой по Wifi. Аналоговый очень хорош тем, что теряется "постепенно", неплохо проходит стены, но качество картинки низкое, помех многовато). Цифровой. Идеально для прямой видимости, высокое качество (хоть 4к пихай), но, в основном, проприетарные стандарты типо DJI - а значит привяза к их оборудованию. Ну и мой выбор Wifilink. фактически, это открытый протокол передачи картинки по Wifi в спец режиме, который позволяет принимать сигнал на почти любое wifi устройство и выводить его в просмотрщики и браузеры. Для гугления деталей: Wifilink, OpenIPC, Ruby. Поэтому это хороший вариант принимать на VR очки картинку.
Дальность при минимальной мощности комплекта у меня во дворе была в районе 30 метров без особых помех. На машинки хватает с запасом (так как мощьность передатчика можно поднять).
Все это запускается через родное приложение (есть для Win, Mac, Android (на очках VR он)) от Runcam. Или в любом браузере =)
Удобно ли в VR очках по сравнению с очками, например DJI?
- Да, удобно, мне нравится видеть обстановку вокруг, но можно и полное погружение. Но это не Ready to go комплект, нужно немного шаманства, чтобы это все работало. Готовые комплекты проще. Но я за универсальное устройство был.
Как сделан head tracking (на фото и видео он снят):
- Все "просто". На ESP32 установлен гиросп gy-bn0055, и все это прикрепленное к шлему VR. Написана программа, которая превращает все движения головы в PWM сигналы и через разьем для тренера на пульте (это разъем чтобы с двух пультов управлять одной машинкой/самолетом, как дополнительные педали в учебных машинах) передается на приемник в машинке и по двум каналам приемника (всего 7) управляет положением подвеса (вертикаль и горизонталь). Это "чуть" сложнее, чем готовые решения. Желательно уметь в хотя бы вайб-кодинг. Если нужно - поделюсь кодом на гитхабе.
Почему эта машинка а не "вот эта за 2 к с али":
- Потому что она есть и ей много лет. Но это Нива среди RC машинок. Понижай-ка, полный привод, блоки спереди и сзади, низкий центр тяжести. И очень хорошее качество - за пробег больше чем 20акб (пробеги RC машин измеряется в количестве аккумуляторов) ни одно поломки. А поломки это прям важно. У меня был Warhead - нитро тачка, вот она ломалась каждый час. А ремонт - разобрать ее в ноль и собрать обратно. Классно первые два раза.
Как ощущения от назвемки против воздуха в FPV:
- Это очень интересные ощущения. Это реальное погружение в трофи-рейды по лесам, но у вас во дворе/парке. В воздухе драйв и высокая цена ошибки (расскажите это моим вертолетам, которые крушились до состояния "перемолол себя"), на земле это размеренность и стратегия. Но или тоже драйв если тачка быстрая.
+ несколько фото
Пс, парень, есть грязь? А сели найду?
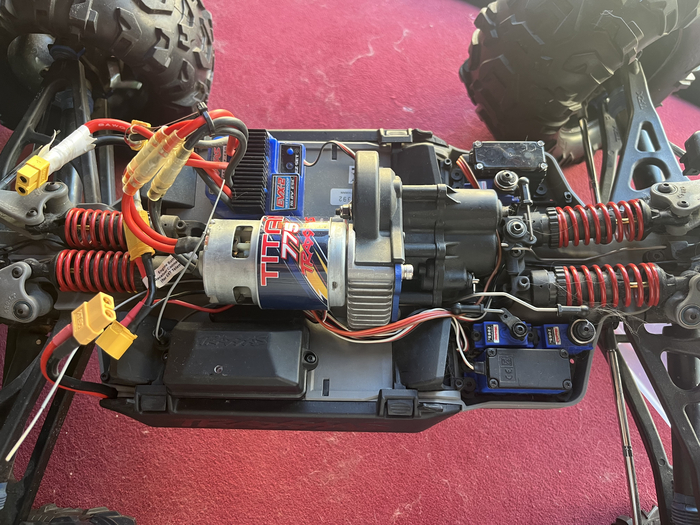
Найди 5 сервоприводов =)
И небольшое видео со второй тачкой для понимания разницы в концепции =)
В мире радиоуправляемых машин это вообще не новинка. Я этим увлекался еще во времена, когда был жив rc-design.
Сейчас уже занимаюсь меньше, все же почти сорокет, но мальчик во мне в этом году опять собрал вот такое.
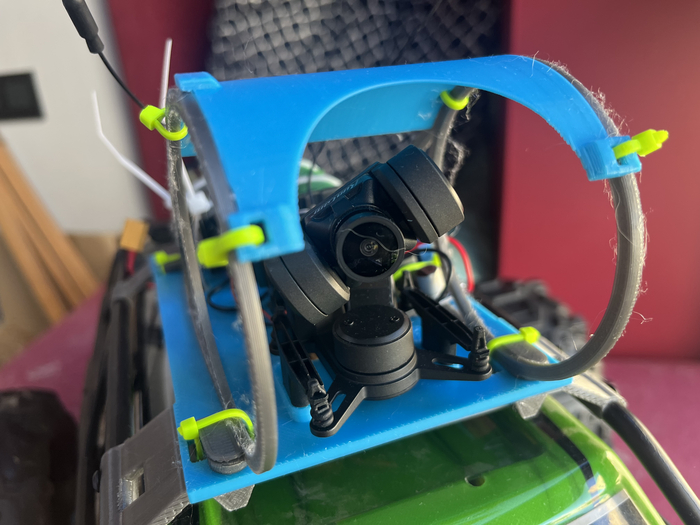
Это камера WiFi link 2 от runcam и подвес от caddax. Все это выводится не просто в очки как на там видео, в в шлем Meta Quest 3. корпус напечатал на 3д принтере.
Сама машинка Traxxass Summit
Полный привод, понижайка, блокировка переднего и заднего диффа. Можно и погонять, но я, в основном, ползаю медленно по говнам.
Для понимания возможностей подвески.
Пульт управления всем этим. Он же передает сигнал с Esp32, которая делает head tracking (поворачивает камеру за поворотом головы).
Как разнообразно готовить без заморочек? Расскажу половину успеха у меня. Да, готовить нужно каждый день, но очень разнообразно и просто.
Все началось с сервиса «Партия еды», он уже умер, не реклама так что..
Привозят готовые комплекты ингредиентов и рецепты.
Таких сервисов сейчас достаточно. На любой уровень: ингредиенты и рецепт, полу готовые ингредиенты, все почти готовое, только обжарь/смешай.
По цене дороже магазина, но дешевле, сильно дешевле кафе.и, главное, сильно вкуснее чем «привозим лоточки с готовой едой». На таких лоточках меня хватило на два месяца, разнообразие там фейковое.
А тут и рецепт по ходу можно немного поменять, и выбор сильно лучше. От «макароны с сыром» и салатов до бефстроганова по французски (на 1,5 часа плясок).
Стоит около 7 к в неделю на двоих. Это только ужины и завтраки для жены (я рано уезжаю).
Да, это дефолт сити.
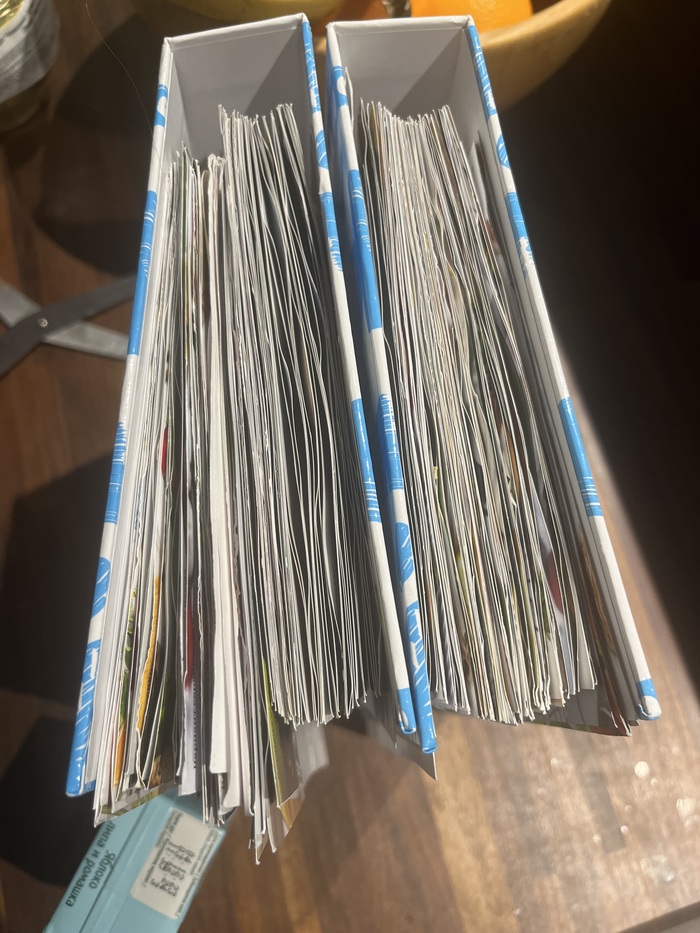
Фото коллекции рецептов, которые привозили. Такой ракурс, чтобы без названия :)
Хех, у меня был случай более приземленный про звонки с «того света».
Была у моей мамы лучшая подруга, по совместительству логопед, учила меня буквы «Р» выговаривать. Часто виделись, много общались и когда я вырос.
Она много лет работала в ИТ, когда оно только в РФ пришло зарубежное. Меня просвящала, ноутбуки с яблочками показывала, программки интересные, как код пишется и всё такое. В общем заинтересовала всем этим, да и хороша собой была, а что еще подростку нужно?
И вот в мои 19, ее не стало. Рак.
Через пару лет я в ту же фирму пришел, а там текучка крайне малая, ведь место хорошее и руководство забугорное. Лет 7 проработал на тот момент, и тут мне звонок, а на телефоне её фото. Я чуть не поседел.
Нет, серьезно, это читать такое ничего, а когда сам не готов, то можно офигеть знатно. Это было еще до ИИ и подделки голосов, подмен номеров и, даже до «вас беспокоит следователь сбербанка»
Беру трубку, незнакомы мужской голос обращается ко мне по имени и что-то хочет явно по моей работе, а я все еще туплю и пытаюсь понять что вообще происходит.
Как итог, я понял, что номер то был корпоративный, его забрали после смерти и, конечно же, выдали новому человеку, но, видимо не сразу, а когда пул начал заканчиваться.
Я все это делал рассказал еще паре «старожил», и большинство из них тоже получали такой звонок (человек знакомился с ключевыми сотрудниками и кто может опытом поделиться), и конечно же, никто не удалял номер, поэтому получил мурашки по коже минимум.
Вот так мы и нашли повод задержаться в кабинете в пятницу вечером и помянуть хорошего человека, который о себе напомнил таким вот способом почти 10 лет спустя.
Потом MBA как у больших дядечек (Буста карьере не дал).
Также коробка корочек: ITIL, PMBOK, TOGAF, 40+SAP сертификатов, пару повышений квалификации в Губке, сертификат инженера ABB, доступ к 1 киловольту.. и так по мелочи для себя лично как хобби.
Работаю в ИТ и тут сейчас творится полный тотальный ахтунг.
Предлагаю создать открытый список компаний/частников, которы нанесли реальный ущерб клиентам своими действиями в данной ситуации.
Нет, уход с рынка или приостановка продаж акул - это понятно, но есть компании, которые блокируют оборудование или Программное обеспечение. Ну и, конечно, не возвращают деньги за услуги, оформленные и оплаченные товары.
Уже есть прекрасные кандидаты: Cisco, Adobe, и др..
Давайте не забудем такое отноение к простым людям и админам, которые не спали у меня на работе эту ночь.