Видеокарта «взлетела» не сразу. Для начала стало ясно, что она не помещается ни в один из имеющихся в наличии корпусов. Был приобретен новый корпус Full Tower и отдельно блок питания на 750Вт. При попытке задействовать возможности CUDA в обучении нейронных сетей возникла следующая проблема – видеокарта слишком новая, фреймворки и библиотеки для искусственного интеллекта (DeepLearning4j, Theano, TensorFlow) её еще не поддерживают. Выход – скачать исходники фреймворков для ИИ и самостоятельно перекомпилировать их для поддержки видеокарты. Однако в процессе оказалось, что эти фреймворки ускоряются не только за счет ресурсов видеокарты, но и требуют поддержки современных инструкций процессора. Был приобретен современный процессор Inter Core I7-10700K с поддержкой AVX, AVX2 команд – , вместе с новой материнской платой и 32 Гб DDR4.
И вот наконец GeForce RTX 3090 смогла продемонстрировать свои возможности!
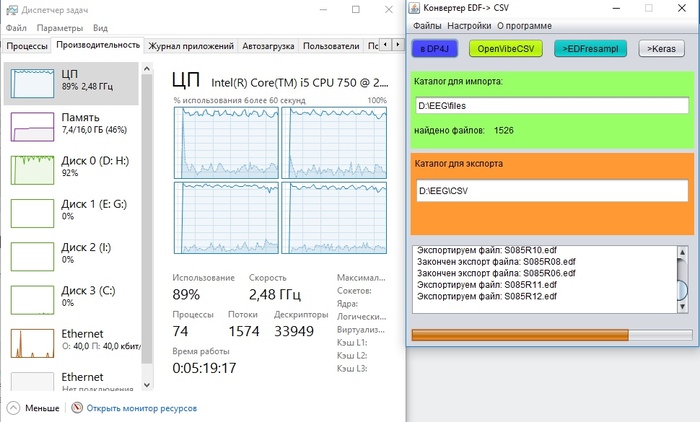
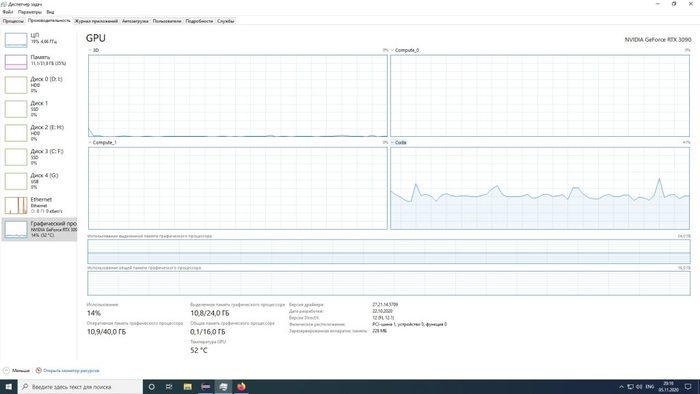
На первом графике видно, как задействуется память видеокарты и ресурсы GPU при обучении Convolution 1D — сверточной одномерной сети, обрабатывающей временные ряды — данные исследований ЭЭГ. Ранее обучение нейронной сети на этом датасете занимало около 4 часов. На новой видеокарте — порядка 3-4 секунд.
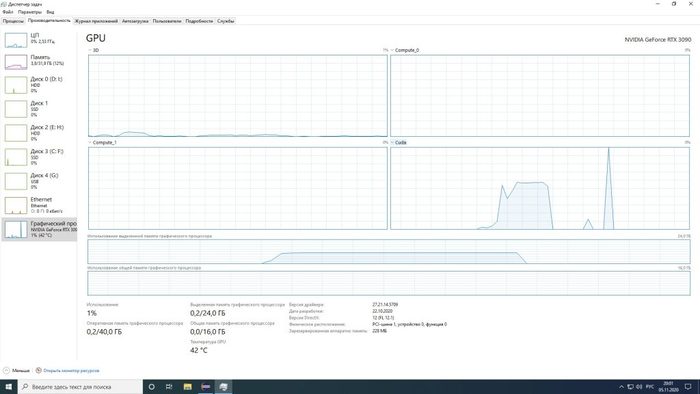
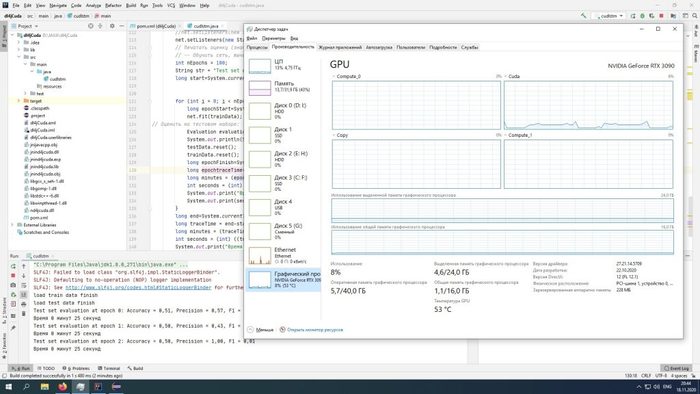
А вот задача посложнее: LSTM — рекуррентная сеть с долгой краткосрочной памятью. Те же данные считаются дольше — около 2 минут, и нагрузка на GPU выше:
Видеокарта решает! Раньше при внесении даже небольших изменений в конфигурацию сети, приходилось ждать несколько часов, чтобы понять, каким образом внесенные изменения отобразились на качестве распознавания признаков нейронной сетью. Теперь эта задача существенно облегчается.
Таким образом, видеокарту удалось запустить в Keras, используя только что вышедшее обновление TensorFlow в версии для GPU.
Однако эти решения используют Python, который при всех его положительных качествах (возможность быстрого прототипирования нейронных сетей, развитые библиотеки для работы с данными, простота и скорость разработки приложений) плохо подходит для многопоточных задач, когда в пределах одного приложения надо получать данные с устройства в реальном масштабе времени, обрабатывать их, подавать на вход ИНС, сохранять в файл, управлять внешними устройствами, рисовать данные на экране и т.д.
Поэтому необходимо было получить возможность работать с ИНС в Java-приложениях, но с этим из-за использования слишком нового железа возникли трудности. Описанными в мануалах способами GPU никак не хотел подключаться, и решения на тематических форумах на сайте разработчиков и GitHub не было, а те рецепты решения проблемы, которые советовали разработчики, не помогали.
Возникло понимание, что причина проблемы - в несовместимости ряда библиотек, компонентов фреймворка, с новыми библиотеками CUDA от NVIDIA.
Пришлось скачивать исходники и пытаться собирать библиотеки под необходимые платформы: CUDA 11.* и CuDNN 8.*, что оказалось нетривиальной задачей: имелось несколько тысяч файлов и масса условий окружения для нормальной сборки, а мануалы описывали сборки устаревших версий и не работали с новыми.
Кроме того, в исходных кодах возникали некоторые ошибки компиляции, одинаковые как для компиляции из Windows 10 (VS2019), так и из Ubuntu (gcc).
Удалось скомпилировать, после правки исходных кодов, часть зависимых библиотек проекта - libnd4j, а затем уже с ними библиотеку nd4j-cuda-11.1.
Ранее поддержка проекта рекомендовала использовать snapshots - версии библиотек из специального репозитория:
«we’ll be releasing a version with 11.0 in a bit, for now you can use snapshots and see if that works? https://deeplearning4j.konduit.ai/config/config-snapshots»
Однако, как оказалось, часть необходимых для работы файлов там отсутствовала, и рекомендация не помогла.
https://oss.sonatype.org/service/local/artifact/maven/redire...
404 — Not Found
Path /org/nd4j/nd4j-cuda-11.0/1.0.0-SNAPSHOT/nd4j-cuda-11.0-1.0.0-20201117.023522-181-windows-x86_64.jar not found in local storage of repository «Snapshots» [id=snapshots]
Что и обусловило компиляцию недостающих файлов. К счастью, версия deeplearniung4j для 11.0 версии CUDA импортировалась, и, добавив в проект в виде отдельных jar и dll файлов скомпилированные библиотеки, удалось запустить приложение на видеокарте!
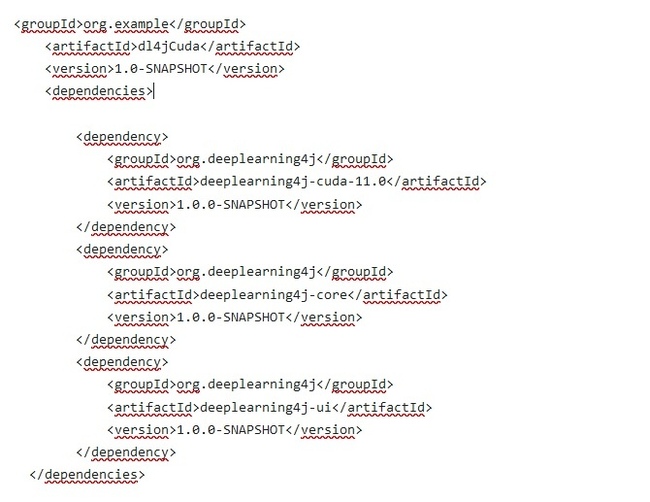
Часть POM файла работоспособного проекта:
Скомпилированные библиотеки добавлены в зависимости вручную:
В данном случае - обучение на сравнительном не большом объеме данных заняло 42 минуты 37 секунд, на CPU эта же задача выполнялась более 2500 минут при полной загрузке процессора.
Вот так я сам добавил поддержку современных видеокарт в Deeplearniung4j, чтобы не дожидаться, пока это сделают разработчики.
Спасибо за внимание. Пока мы еще в начале пути, буду продолжать рассказывать о нашей работе!