

Лазерный дальномер на вебкамере с одноплатником
Продолжаю осваивать Python и работу с видео: сделал бюджетный лазерный дальномер на одноплатнике и вебкамере.
Делаю для себя, учусь Python и работе с железом. Никаких революционных изобретений тут нет)) можете просто за меня порадоваться или что-то конструктивно посоветовать. И нет, это не вайбкод - зачем учиться и вайбкодить - не понимаю.
Всем спасибо))
По железу:
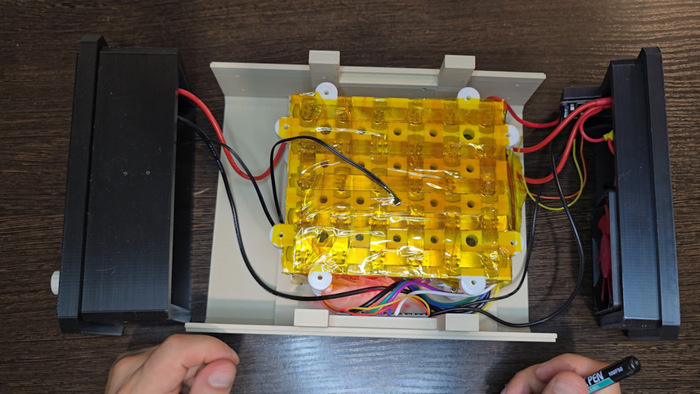
- Raspberry pi 3b+
- вебкамера defender (ничего особенного)
- лазерный диод, управляемый npn-транзистором
- монитор за 3,5 тыс. руб.


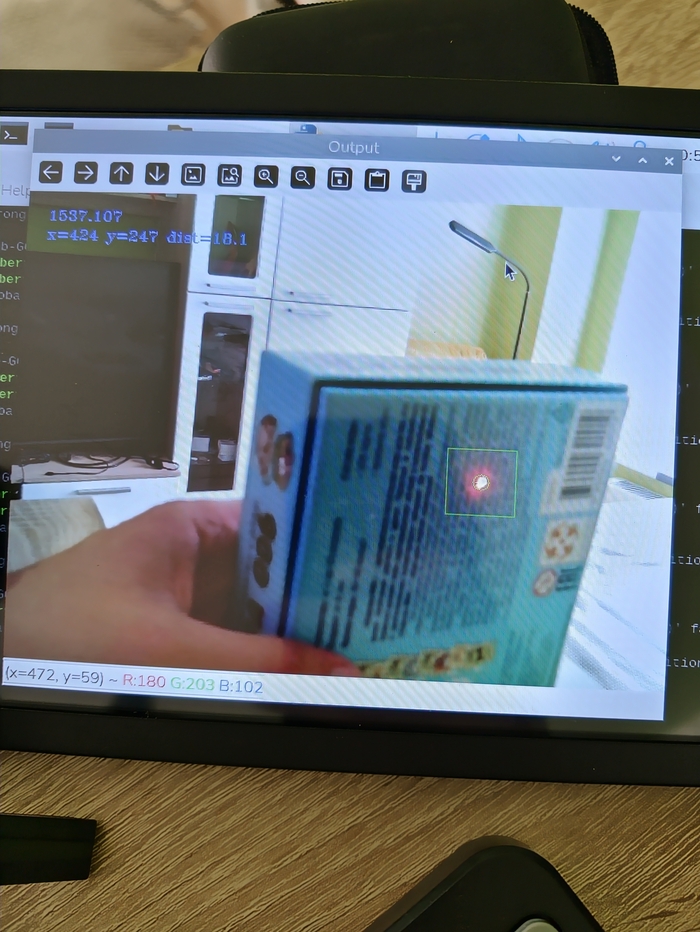
Идея: лазерный луч жестко связан с камерой (у меня пока стоят неподвижно). Лазер дает проекцию луча на объект, камера получает изображения, а софт распознает на них пятно (которое всегда находится на одной прямой). Далее преобразование координат X, Y в расстояние Z от лазера до объекта.
Реализовал пока базу - все работает!
Работает на одноплатнике пока с фрэймрейтом 4-5 fps.
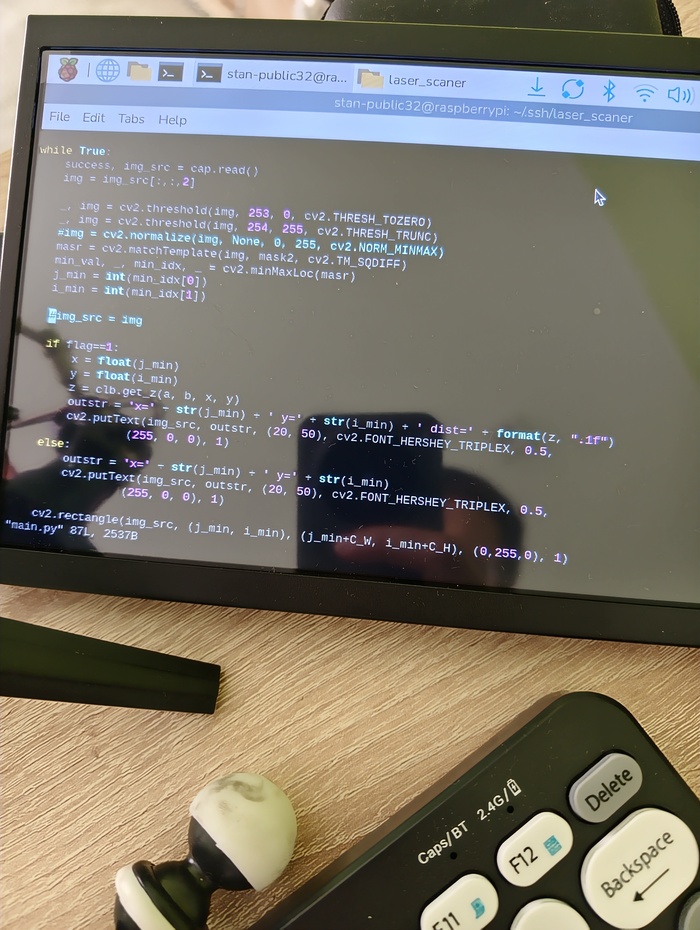
Софт буду допиливать - пока на python.
Проект выложил на github: https://github.com/Stan-public32/laser_scaner.git
Еще предстоит сделать:
Оптимизировать код для ускорения работы.
Исключить обработку пикселей, лежащих за пределами номинальной прямой на изображении.
3. Скорректировать математикой погрешность от нелинейного преобразования (пока функция преобразования линейная).
4. Поработать с фильтрацией изображения.