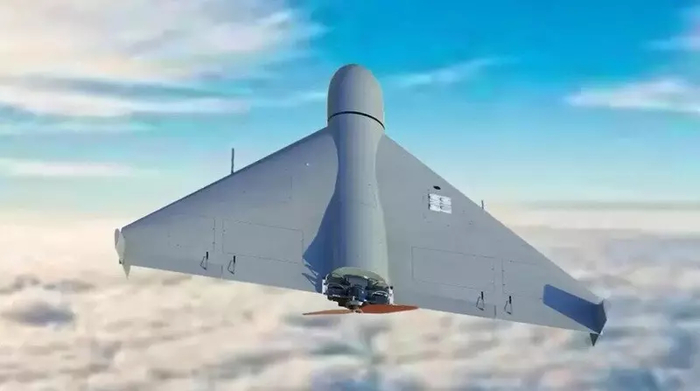
В небе над позициями российских подразделений все чаще мелькают не только ударные, но и грузовые беспилотники. Новейший логистический дрон «Пиранья-20», запущенный в серию Российским СКБ, стал для бойцов на передовой тем, что они называют «тихой работой» — в отличие от грохочущих моторов и рискованных рейдов на автомобилях.
Аппарат, внешне напоминающий гражданский агродрон, но с грузоподъемностью до 30 кг, взял на себя самую опасную работу — доставку всего необходимого на самые горячие участки. Вода, пайки, боеприпасы и медикаменты теперь часто прилетают по воздуху, минуя дороги, простреливаемые артиллерией и дронами-камикадзе.
Военный эксперт Алексей Леонков подчеркивает, что в условиях, когда противник активно охотится за автотранспортом и наземными роботами, грузоподъемные беспилотники, такие как «Пиранья-20», приобретают статус незаменимого средства для экстренного пополнения запасов и поддержки подразделений, действующих в отрыве или попавших в окружение.
Но главная «изюминка» дрона, о которой говорят военные, — не его скорость в 100 км/ч, а способ управления. «Пиранья-20» может работать по оптоволоконному кабелю, который разматывается в полете. Эта технология превращает его из курьера в диверсанта.
«Дрон использует оптоволокно, чтобы долететь до позиций противника, заминировать территорию и вернуться обратно. Главное преимущество такого подхода в том, что при полете на оптоволокне невозможно перехватить видеосигнал, поэтому противник не узнает точное место закладки мины», — объяснил представитель компании.
Это делает «Пиранью-20» неуязвимой для систем радиоэлектронной борьбы (РЭБ), которые массово используются для охоты на украинские «Фурии» и «Шаркы». Зенитчики, в свою очередь, подтверждают, что заметить и сбить такой малошумный и не излучающий сигнал аппарат — задача крайней сложности, рассказали Известия.
Разработчики предусмотрели и «план Б»: в случае обрыва тонкого кабеля дрон автоматически переключается на резервный радиоканал и продолжает выполнение задачи.
Военный эксперт Дмитрий Корнев отмечает, что 30 кг продовольствия достаточно для обеспечения суточным рационом около 30 человек (исходя из минимального расчета 1 кг еды на бойца).
— Это жизненно важная поддержка для подразделений, находящихся в оперативном отрыве, — рассказал он «Известиям».
Создание такой беспилотной логистической сети становится стратегической задачей, которая кардинально меняет снабжение на фронте. Пока одни дроны несут смерть с неба, другие — тихо и методично несут жизнь и усиление.
Подписывайтесь на Телеграм «Сделано у нас» тут, а на сообщество на Пикабу можно подписаться здесь.