Уже более шестидесяти лет Марс привлекает к себе внимание мирового учёного сообщества. Что немаловажно, интерес к планете лишь растёт от года к году, и вот уже не за горами первые пилотируемые полёты. В этом ролике мы поведаем вам об основных вехах изучения красной планеты марсоходами.
UPD: добавили текстовую версию, приятного чтения!
В феврале этого года мы стали свидетелями большого события. Запущенный 30 июля прошлого года марсоход Perseverance совершил мягкую посадку на поверхности красной планеты. В комплекте с ним был доставлен роботизированный вертолёт Ingenuity, предназначенный для демонстрации возможности полётов на Марсе. Чуть позже, в мае, мягкую посадку совершил аппарат Чжужун, находящийся в составе миссии Тяньвэнь-1. Это китайская полномасштабная исследовательская программа, которая, помимо спускаемого аппарата, включает в себя орбитальную лабораторию. Интерес к Марсу сейчас силён как никогда, особенно учитывая планы Илона Маска на первый пилотируемый полёт к планете в ближайшие пять лет. На фоне такого ажиотажа мы решили вспомнить, с чего начинались первые исследования планеты.
Начнём с краткой справки. Марс – четвёртая по удалённости от Солнца и седьмая по размеру планета Солнечной системы. Относится к планетам земной группы, то есть обладает высокой плотностью и состоит преимущественно из кислорода, кремния, железа, магния и других тяжелых элементов. В частности, из-за большого содержания оксида железа, поверхность планеты имеет красноватый цвет. Отсюда и пошло знаменитое название «красная планета». Рельеф Марса разнообразен, здесь есть ударные кратеры, вулканы, долины и даже ледниковые шапки на полюсах, совсем как на Земле. Вокруг планеты вращаются два маленьких спутника неправильной формы, Деймос и Фобос. Все названия заимствованы из древнегреческой и древнеримской мифологий. Марс – бог войны, Деймос и Фобос, они же Ужас и Страх в переводе – его сыновья. Первые упоминания небесного тела относятся к 1534 году до нашей эры.
На протяжении почти трёх тысячелетий с этого момента Марс оставался недосягаем. Но всё резко изменилось в 60-ых годах прошлого века. Первыми покорять планету взялись учёные из Советского Союза. Процесс проходил не очень гладко: аппараты либо не могли совершить мягкую посадку, из-за чего разбивались, когда цель была уже близка, либо теряли связь незадолго после запуска. Но в 1971 году их ждал большой успех. Была запущена Автономная Межпланетная Станция Марс-3. Спускаемый аппарат, являющийся частью проекта, впервые в истории совершил успешную посадку на поверхность красной планеты. Спустя полторы минуты после посадки, станция была приведена в рабочее состояние. Учёные уже готовились получить первые снимки Марса, но через 14,5 секунд вещание было прекращено. Причиной тому послужили неправильные выдержки, выбранные разработчиками фототелевизионной системы. Снимки получались пересветленными и были почти непригодны для дальнейшего анализа. Несмотря на такую оплошность, орбитальная станция Марс-3 проработала больше года и всё это время передавала данные о планете.
В 80-ых были предприняты программы Фобос-1 и Фобос-2, в ходе которых спутник был тщательно изучен. Но их масштаба было недостаточно. К сожалению, Марс-3 так и остался единственным триумфом в истории советских исследований Марса.
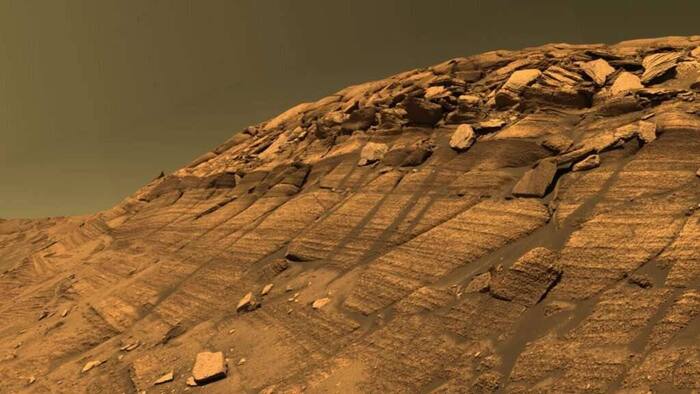
По другую сторону океана тоже велись интенсивные работы. Так, с 1962 по 1973 год в рамках программы Маринер к Марсу были запущены 10 аппаратов. Один из них, Маринер-9, стал первым искусственным спутником планеты. Однако по-настоящему знаменательным стало другое событие. Учтя в своих разработках наработки и ошибки советских коллег, 20 августа 1975 года НАСА запустило Викинг-1. Спустя 11 месяцев спускаемый аппарат совершил успешную посадку на планету и начал передавать на Землю снимки. Именно на них люди впервые смогли увидеть марсианские ландшафты, причём в цвете. Аппарат успешно проработал до 11 ноября 1982 года, но в этот день, при неудачной перезагрузке, навсегда пропал из эфира. Параллельно с первым Викингом, на обратной стороне планеты работал Викинг-2, который собирал данные вплоть до 1981 года. Они считаются первыми успешными исследовательскими модулями. Но есть одна загвоздка: они не двигались.
Первым исследовательским модулем, сумевшим покорить марсианский грунт, стал Sojourner. Он совершил посадку на поверхность планеты 4 июля 1997 года в составе спускаемого аппарата Pathfinder. Марсоход работал в течение 83 сол (марсианские сутки, 1 сол = 24ч 39м на Земле) и выполнил 15 анализов пород, благодаря чему ученые смогли сделать выводы относительно климата и атмосферы планеты. В частности, о высокой вулканической активности и присутствии на Марсе воды в прошлом. Прежде чем связь с Pathfinder была потеряна, Sojourner преодолел дистанцию в 100 метров.
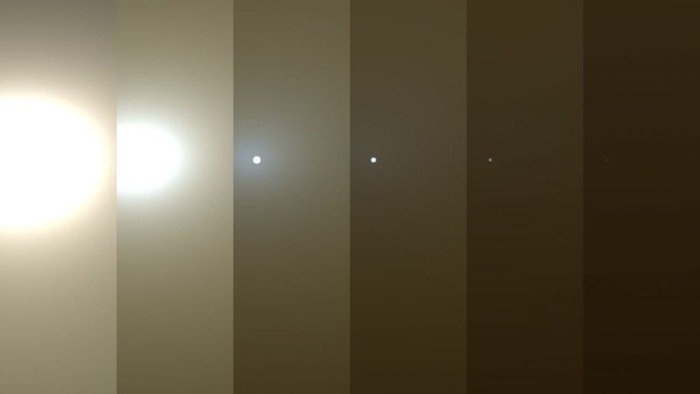
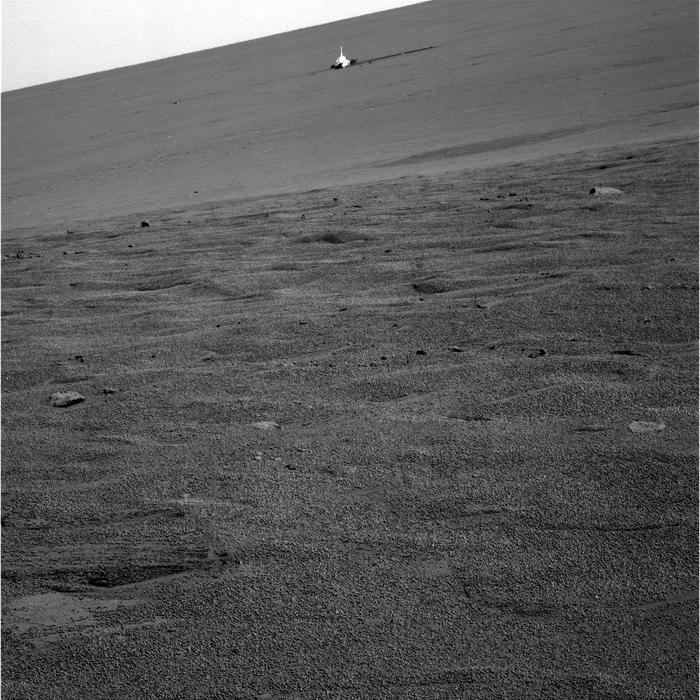
Следующими на Марсе побывали роверы-близнецы второго поколения, Spirit и Opportunity. Оба совершили мягкую посадку на поверхность планеты в январе 2004 года, 4 и 25 числа соответственно. Марсоходы были рассчитаны на работу в течение 90 сол, после чего должны были уйти на покой. Однако им на руку сыграл ветер. Он сдувал пыль и песок, оседавшие на поверхности солнечных батарей, благодаря чему выработка электроэнергии значительно превышала планируемые показатели. Таким образом, Spirit удалось проработать целых шесть лет, а Opportunity и вовсе стал настоящим долгожителем. Он работал вплоть до 18 июня 2018 года, тогда всю планету охватила мощнейшая пылевая буря, и аппарат перестал выходить на связь.
С технической точки зрения эти марсоходы крайне примечательны. На момент их создания (2003 год), в них стояли самые совершенные компьютеры, что позволило создать аналитическую систему для определения наиболее лёгкого пути. Работала она следующим образом: две камеры ровера проводили анализ местности на наличие опасных и труднопроходимых мест, после чего делали снимки. Затем изображения совмещались в стереокартинку, на основании которой строился маршрут. Данная система также внесла большое влияние в успех миссий. За свой рабочий цикл аппараты передали обширнейший массив информации о планете.
С августа 2012 года вместе с Opportunity по Марсу колесит ещё один ровер, Curiosity. Он относится к третьему поколению марсоходов НАСА, и значительно превосходит своих предшественников. На Земле аппарат весит внушительные 900 килограмм. Причина такому весу – большое количество исследовательской аппаратуры на борту. Можно даже сказать, что он везёт на себе целую химическую лабораторию. Дабы обеспечить такое габаритное устройство достаточным количеством энергии, инженерами было принято решение отказаться от солнечных батарей. Их эффективность на таком габаритном устройстве была бы крайне мала. Вместо них ровер питает и обогревает радиоизотопный термоэлектрический генератор, использующий в качестве источника энергии процесс распада диоксида плутония-238. Его ресурса хватит ещё на 25-30 лет, так что можно с уверенностью сказать о том, что решение это было крайне успешное.
Основной целью миссии Curiosity является поиск жизни на планете и попутное изучение химического состава различных пород. Так, проводя бурения, марсоход обнаружил водяной лёд под слоем грунта. Помимо этого, с его помощью была найдена галька, образованная потоками жидкой воды. Оба факта окончательно закрепили утверждение о том, что на Марсе есть вода. Вот уже на протяжении девяти лет марсоход ежедневно отправляет на Землю марсианские панорамы, записанные с его 17-ти видеокамер.
Их вы можете посмотреть в видео сверху (с 7:20).
Такова на данный момент история изучения красной планеты марсоходами. Впереди ждут великие открытия и множество интересных проектов, включая российско-европейский ExoMars.
Если вы хотите узнать больше про современные программы освоения Марса, поддержите пост плюсами и оставляйте комментарии. Так мы поймем, что сегодняшняя тема была вам интересна. Спасибо за внимание!