

Int-Ball — робот-камера на борту МКС, разработанный JAXA (японское агентство аэрокосмических исследований)
Он делает фотографии и видео астронавтов и отправляет их в центр управления полётами.
Он делает фотографии и видео астронавтов и отправляет их в центр управления полётами.
Аппарат BepiColombo, которым управляют совместно ESA и JAXA, совершил первый из серии гравитационных маневров у Меркурия. В точке максимального сближения зонд находился на расстоянии 198 км от поверхности планеты, которая является конечной целью миссии и на орбиту которой аппарат выйдет в 2025 году.
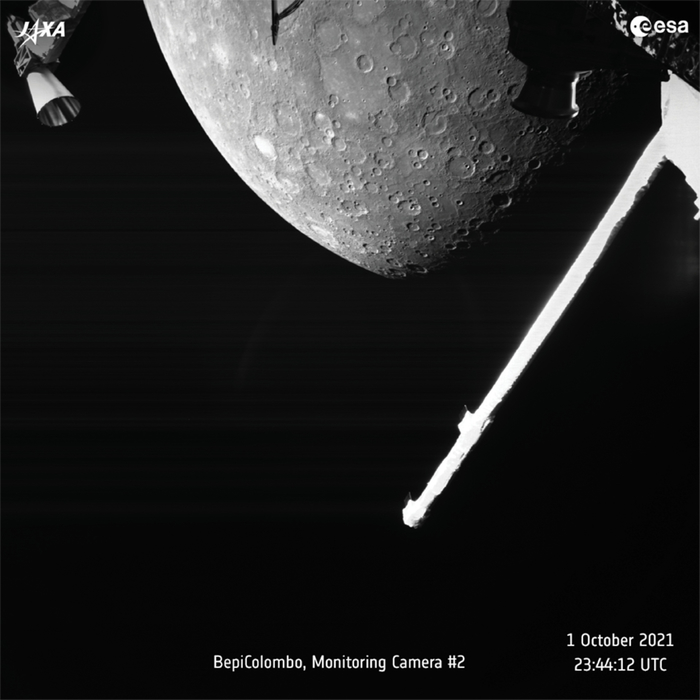
Основная научная камера пока не работает, она закрыта транспортным модулем, однако обзорные камеры снимали процесс гравитационного маневра. Фотографии в настоящее время отправляются на Землю. А этот снимок был сделан обзорной камерой, когда BepiColombo находился на расстоянии 2418 км от Меркурия. На этом снимке север находится в правом нижнем углу. Запечатлена часть Северного полушария Меркурия.
Этот гравитационный маневр стал четвертым из девяти запланированных BepiColombo и первым у Меркурия. Всего за свое семилетнее путешествие аппарат совершит один маневр у Земли, два – у Венеры и шесть – у Меркурия, прежде чем выйдет на орбиту этой планеты и начнет свою основную работу.
Источник: https://vk.com/wall-22468706_121345
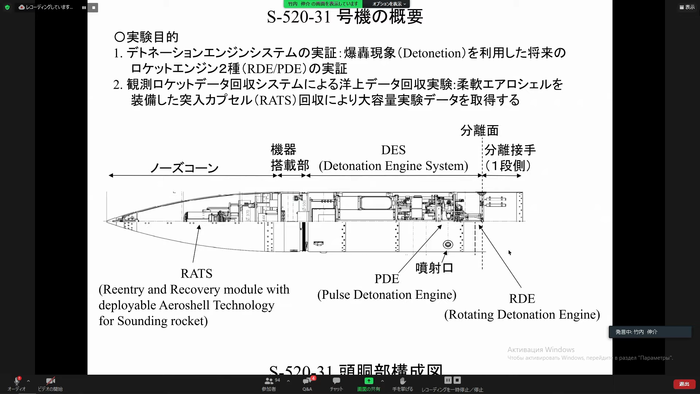
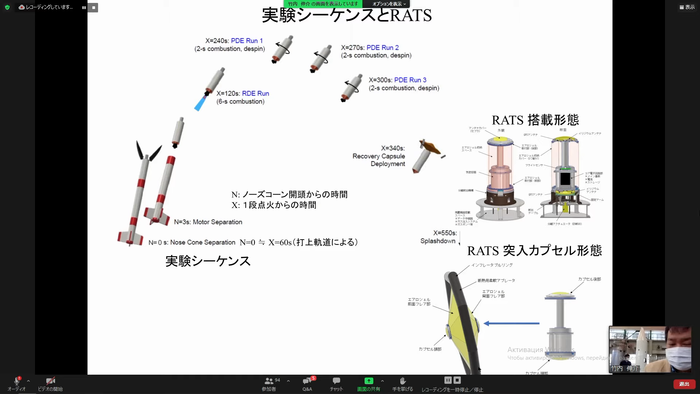
Эксперимент был запущен 26 июля на борту суборбитальной ракеты S-520-31 из космического центра Учиноура в префектуре Кагосима. Установка на борту использует ударные волны для создания тяги и в японском космическом агентстве считают, что ее можно эффективно использовать для исследования дальнего космоса. При детонации продукты горения расширяются со сверхзвуковой скоростью, что теоретически на 25% более эффективно, чем обычное дефлаграционное сгорание. Более высокая эффективность двигателя может обеспечить значительную экономию топлива.
«Этот эксперимент является первой в мире летной демонстрацией технологии ракетного двигателя, который безопасно и эффективно преобразует ударные волны (взрывные волны), возникающие при взрывной реакции смеси газа и кислорода, в тягу. Технология системы детонационного двигателя (DES) сочетает в себе импульсный детонационный двигатель (PDE), который периодически генерирует ударные волны, и роторный детонационный двигатель (RDE), который непрерывно преобразует ударные волны в пространстве в формe пончика», – заявили в JAXA.
По мнению японских ученых, дальнейшее развитие данной технологии позволит сократить массу двигательной установки до десяти раз, сохранив, при этом, мощность. Детонационный способ горения топлива в ракетном двигателе позволяет существенно упростить конструкцию агрегата, отказавшись от целого ряда сложных узлов. Однако практическая реализация детонационного способа горения является сложной задачей из-за проблем с перемешиванием топлива и окислителя, а также защитой от самовозгорания.
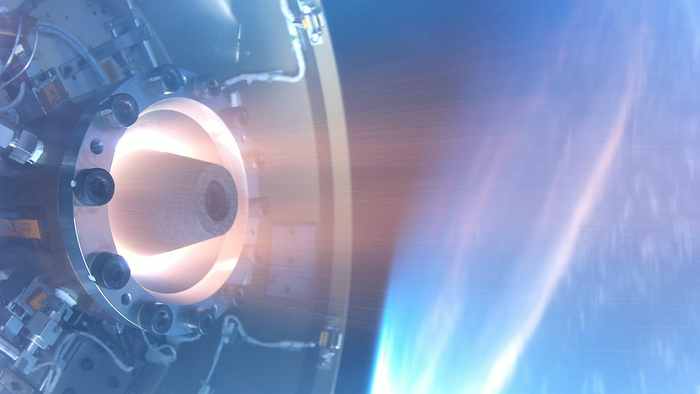
Двигатель ВДД проработал 6 секунд с тягой в 500 Н, импульсный детонационный двигатель ИДД проработал 2 секунды (×3 раза), были получены данные о давлении, температуре, вибрации, положении и ориентации.
Кроме того, спускаемая капсула с защитным тепловым экраном, которая использовалась для этого космического эксперимента, смогла продемонстрировать возможность возвращения нового образца после “приводнения”.
Работа двигателя на стенде:
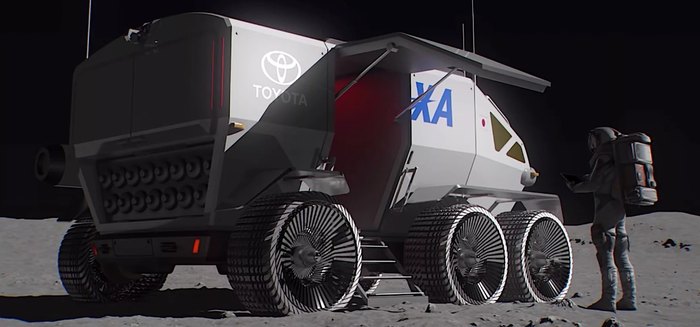
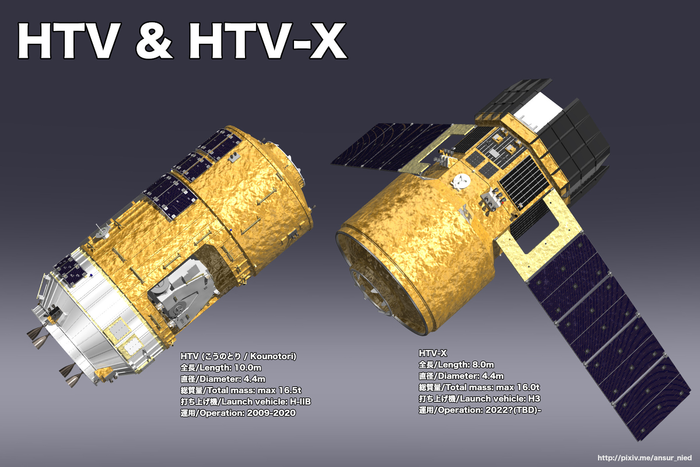
Японское космическое агентство (JAXA) за ближайший год получит 472 млн долларов на выполнение обязательств Японии по программе «Артемида». Из них $362 млн будут потрачены на разработку тяжелой грузовой транспортной системы HTV-X для доставки грузов на американскую окололунную станцию Gateway, еще $60 млн будет направлено на технологические исследования по созданию модуля этой станции. Также Япония намеревается в перспективе разработать и построить тяжелый герметичный пилотируемый луноход для перемещения астронавтов по поверхности Луны. По предварительным данным, его разработкой займется компания Toyota.
Почти половина космических расходов Японии ($2,1 млрд) приходится на Министерство образования, науки и технологий. Сейчас JAXA реализует несколько научных проектов. Автоматическая станция «Хаябуса-2», доставившая на Землю образцы грунта с астероида Рюгу, выполняет свою дополнительную миссию. В 2022 году Япония планирует запустить лунный посадочный аппарат SLIM.

Также ведется работа над амбициозной межпланетной станцией MMX, которая должна будет доставить на Землю грунт со спутника Марса Фобоса. Ее запуск запланирован на 2024 год.

В этом же году JAXA рассчитывает запустить очередной космический аппарат для исследования астероидов DESTINY+.

И, наконец, продолжится финансирование совместной с Индией лунной исследовательской программы LUPEX.
$185 млн будет потрачено на завершение разработки новой тяжелой ракеты H-III. Ее создание затянулось из-за технических проблем с водородными двигателями LE-3. В январе центральный блок первой ракеты был отправлен на космодром для подготовки к запуску. Ее первый пуск ожидается в наступающем фискальном году, т. е. до конца марта 2022 года. Начиная с 2024 года H-III должна будет полностью заменить ракету H-IIA.

Еще $783 млн составят расходы на программу дистанционного зондирования Земли, которая в основном носит оборонный характер – на Министерство обороны из этих денег приходится около $541 млн. Также численность служащих «Космических вооруженных сил» Японии будет увеличена на 50 человек. Сейчас в них служат менее 30 человек.
Японское космическое агентство (JAXA) опубликовало планы создания многоразовых ракет, среди которых особым образом выделяется аппарат, дизайн которого походит на небольшой Starship от SpaceX.
Возможно, что полет мы увидим около 2040 г.

– 2030 г.: Ракета-носитель частично многоразового использования (типа Falcon 9 / Heavy-style), переход на метановый ракетный двигатель. Грузоподъемность от 15 до 20т на низкую опорную орбиту. И на ее модульной основе еще одна ракета тяжелого/сверхтяжелого класса, в зависимости от конфигурации выводящая от 26 до 54т.

– 2035 г: Система воздушного старта (самолет + одноразовая ракета, а позже – пилотируемая версия.)
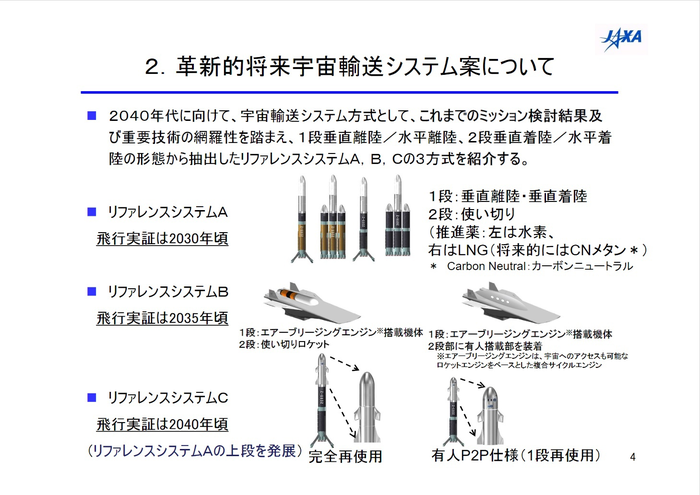
– 2040 г: многоразовая система в стиле Starship.
Экипаж МКС-64 — шестьдесят четвёртой долговременной экспедиции на Международную космическую станцию.
1. Командир МКС Сергей Рыжиков (космонавт Роскосмоса) "Союз МС-17"
2. Бортинженер МКС Сергей Кудь-Сверчков (космонавт Роскосмоса) "Союз МС-17"
3. Бортинженер МКС Кэтлин Рубинс (астронавт НАСА) "Союз МС-17"
4. Бортинженер МКС Майкл Хопкинс (астронавт НАСА) SpaceX Crew-1
5. Бортинженер МКС Виктор Гловер (астронавт НАСА) SpaceX Crew-1
6. Бортинженер МКС Шеннон Уокер (астронавт НАСА) SpaceX Crew-1
7. Бортинженер МКС Соити Ногучи (астронавт JAXA) SpaceX Crew-1
Японское агентство аэрокосмических исследований намерено к 2035 году построить на Луне завод по производству водородного топлива. Об этом сообщило в понедельник агентство Kyodo.
Предприятие планируется создать в районе южного полюса спутника Земли, где, предположительно, находятся залежи льда. Из него будут получать питьевую воду, а также кислород и водород. Последний компонент можно применять в качестве топлива для перемещений как по самой Луне, так и для полетов между ней и окололунной космической станцией.

Говоря о лунном транспорте, стоит отметит уже ведущиеся совместные исследования JAXA и Toyota пилотируемого герметичного лунохода, в котором используются технологии электромобилей на водородных топливных элементах.

В прошлом году, 13 июня 2019 года, JAXA и Toyota подписали соглашение с предполагаемой датой изготовления прототипа во второй половине 2020-х годов. Вездеход будет вмещать двух человек, которые смогут находиться внутри до 14 дней. Это даст астронавтам уникальную возможность комфортно жить, работать и при этом передвигаться по Луне. Что касается габаритов, планетоход составляет 6 метров в длину и 3,8 метра в высоту. Хотя он предназначен для перевозки двух человек, Toyota говорит, что он может поместить и четырех в чрезвычайной ситуации. Астронавты смогут ездить без скафандров, но при этом у них будет достаточно места, чтобы входить и выходить в громоздких костюмах.

В прошлом году Япония объявила о решении присоединиться к лунной программе NASA. 10 июля Министерство образования, культуры, спорта, науки и технологий Японии и NASA подписали соглашение о сотрудничестве в области исследования естественного спутника Земли. Речь идет о взаимодействии с целью поставок необходимого исследовательского оборудования, обмене данными о лунной поверхности, совместном создании лунохода, а также об отправке японских астронавтов на Луну.

Также Япония обязуется создать грузовой корабль и новую ракету для доставки грузов на лунную орбиту. Новый грузовик для низкой орбиты JAXA планирует запустить уже в 2022г. HTV-X сможет перевозить около 5,8 тонны грузов, что на 50 процентов больше, чем HTV. Вероятно, именно на его основе и будет создана лунная версия.
Новым основным носителем для Японского космического агентства должна в скором времени стать H3. Как и Н2А, она состоит из двух ступеней. В качестве топлива используются жидкий водород и жидкий кислород. По замыслу конструкторов, H3 будет использоваться в трех основных конфигурациях, способных вывести от 4 до 8 тонн полезной нагрузки на геопереходную орбиту, где цена запуска базовой версии без твердотопливных ускорителей составит $45млн., что также позволит ей конкурировать на рынке коммерческих запусков.

Подготовка шлюза Bishop завершается на базе частной компании Nanoracks в Хьюстоне, а в конце месяца он будет отправлен во Флориду для размещения на корабле Dragon. После доставки на МКС Bishop будет извлечен роботизированной рукой из грузовика, протестирован и установлен на модуль Tranquility.
В шлюзе будут размещаться микроспутники для выведения на орбиту, а также эксперименты, которым требуется безвоздушная среда. После загрузки спутников и экспериментов на борт Bishop роботизированная рука отсоединит шлюз от Tranquility. После окончания процедур рука установит Bishop на модуль, и цикл может быть повторен.
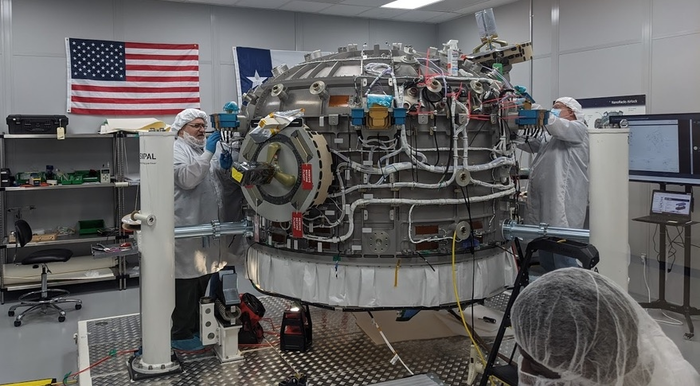
Nanoracks начала разработку шлюза несколько лет назад, чтобы удовлетворить растущий спрос на развертывание небольших коммерческих спутников с борта МКС. Компания для этого использовала шлюз на японском модуле Kibo. Но у него есть ограниченная пропускная способность, поэтому было решено создать свой универсальный шлюз.
Стартап GITAI вместе с JAXA работает над созданием роботов, которые могут обслуживать космическое оборудование, проводить научные эксперименты и решать другие конкретные задачи на борту МКС. На данный момент частная компания тестирует функции дистанционного и беспилотного управления роботом в наземном макете японского экспериментального модуля «Кибо». Созданная стартапом роботизированная рука может уже в середине 2021 года отправиться на МКС и использоваться в модуле Bishop. Там робот будет выполнять различные задачи, такие как управление переключателями, подключение и отсоединение кабелей и сборка панелей.
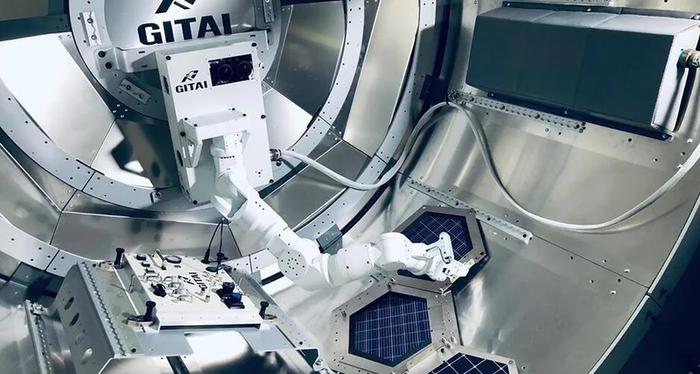
Конечная цель проекта состоит в создании роботизированных систем, которые можно будет использовать не только на МКС, но и в других космических программах и миссиях. Кроме того, эта технология может найти «наземные» применения, например, в телемедицине и аварийно-спасательных работах. При этом роботы смогут не только помогать астронавтам в работе, но и открыть путь для частного сектора в космическую отрасль.

