CubeRover MK1 - Луноход на базе наноспутника типа Кубсат
Всем привет! Сегодня у меня для вас проект модели лунохода на базе наноспутника типа кубсат.
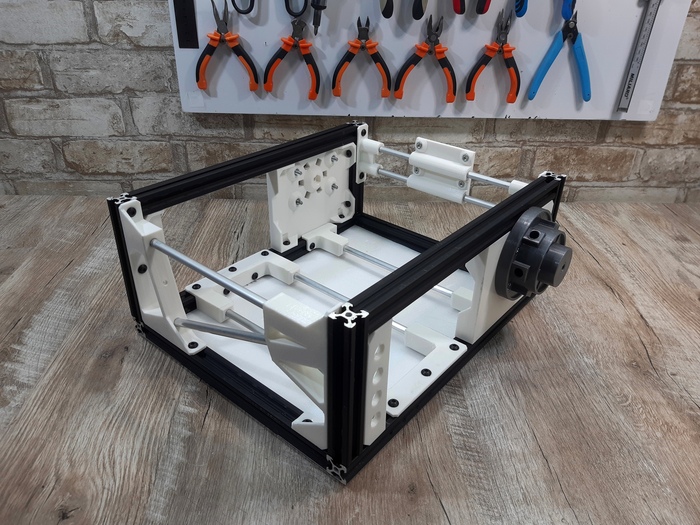
Все комплектующие, как обычно, покупаются на Али, а все детали печатаются на 3D принтере. Ссылка на страницу проекта – тык.

В первой части видео по сборке я подробно расписал всю концепцию, так что не буду здесь повторяться. Суть в том, если сейчас у нас есть миниатюрные спутники, которые собирают школьники и студенты, то в будущем, возможно, появятся и студенческие луноходы. И хотя условия на поверхности Луны несколько отличаются от тех, в которых спутники работают на низкой околоземной орбите, всё же не исключено, что для создания таких небольших и простых луноходов можно использовать детали от кубсатов, которые выпускаются серийно. И вот с этой моделью я решил представить, как такой луноход может выглядеть.
Так же в ближайшем будущем я хочу создать полноценный луноход, пусть и не большой, такого же формата. Если школьники собирают спутники, которые вполне себе работают на орбите, то и мне, думаю, такое тоже под силу. Вряд ли, конечно, мне удастся отправить его на Луну, но если он пройдёт испытания в термовакуумной камере, и не развалится на вибростенде – то я уже буду счастлив.
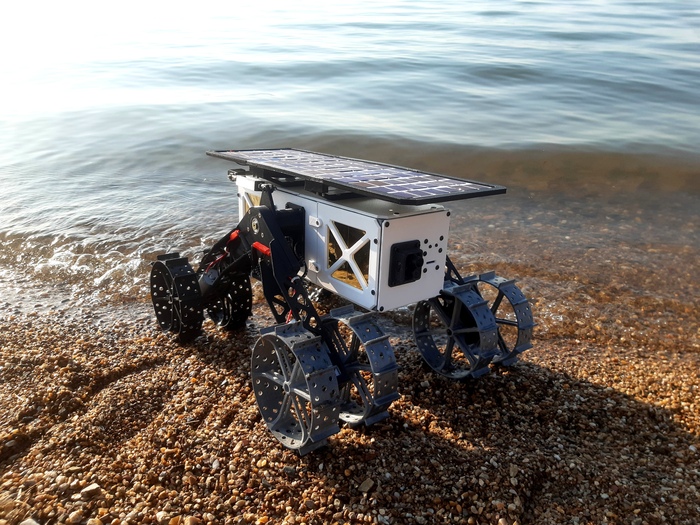
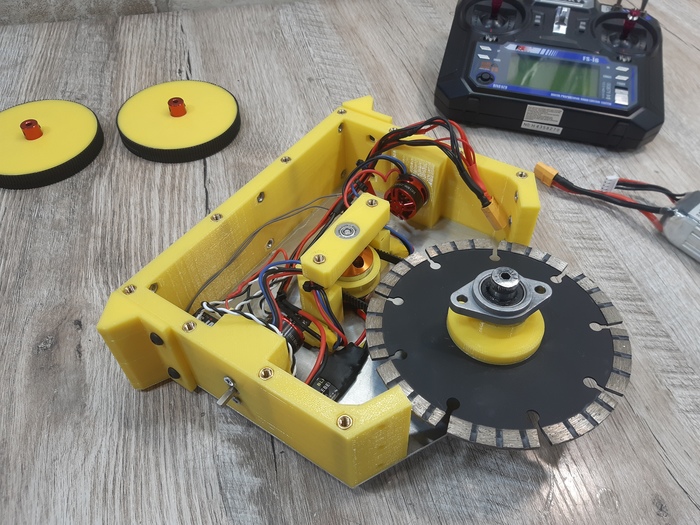
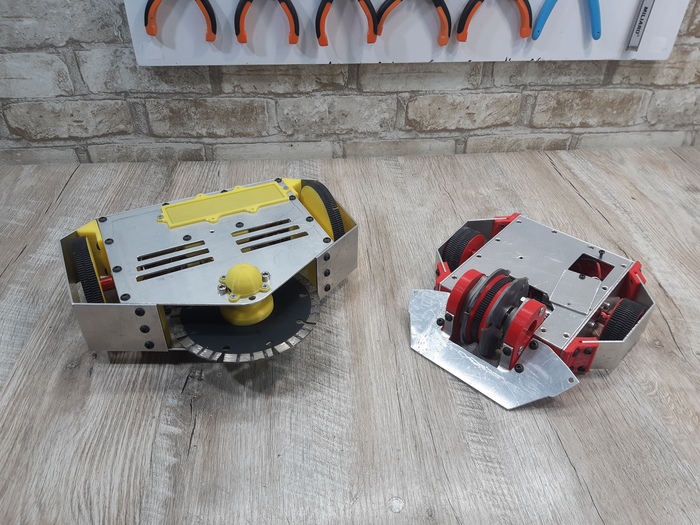
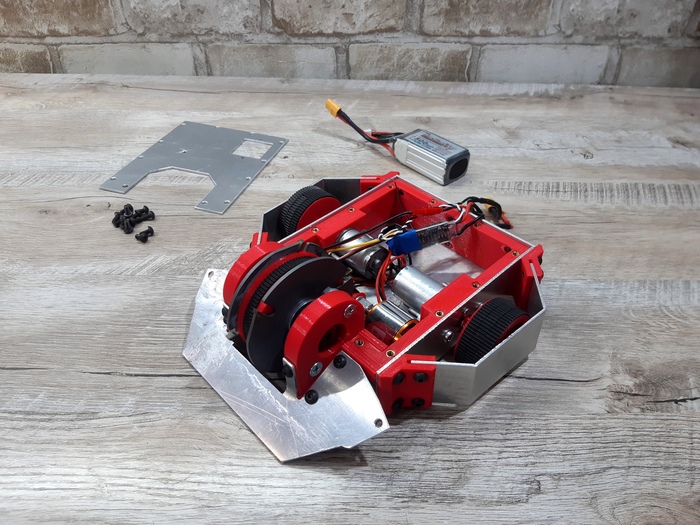
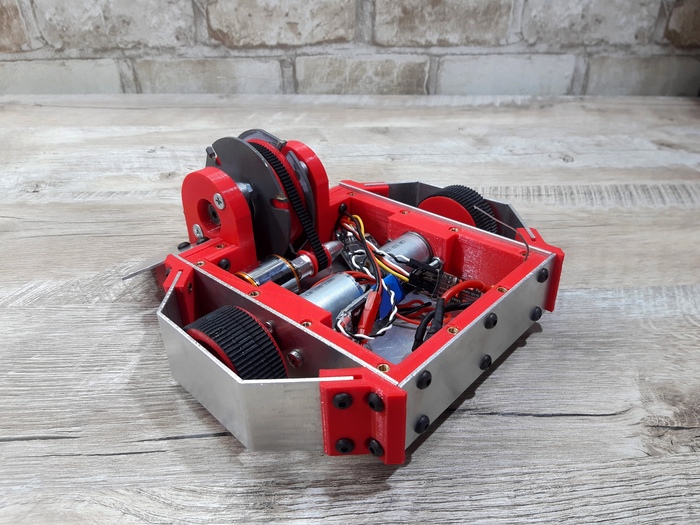
Но сначала будет несколько моделей, все с разной ходовой. Посмотрим, как всё это выглядит и как работает на деле. Первая модель – классический четырёхколёсный ровер с простой балансирной подвеской.
Это третье, заключительное видео с нормальными тестами. Там же, на канале, можно найти первые 2 части:
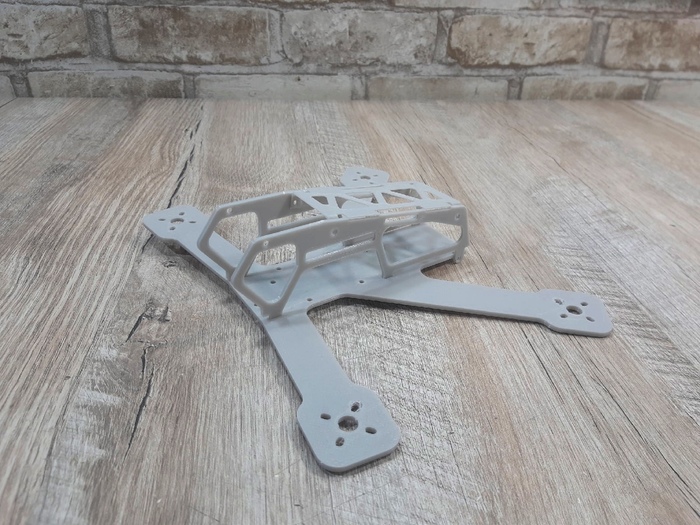
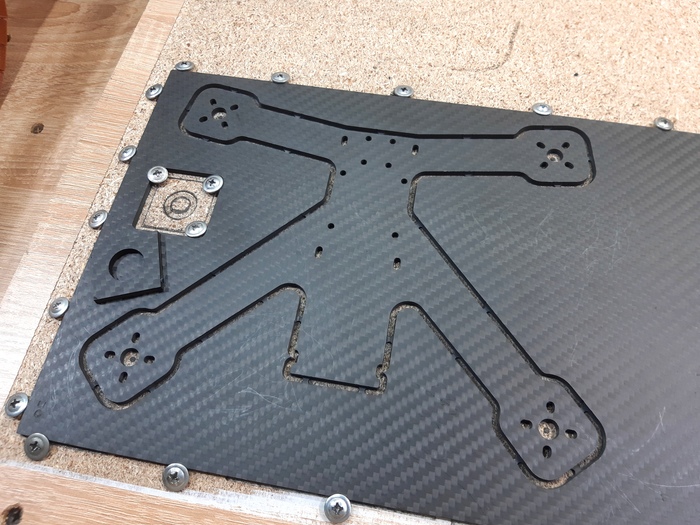
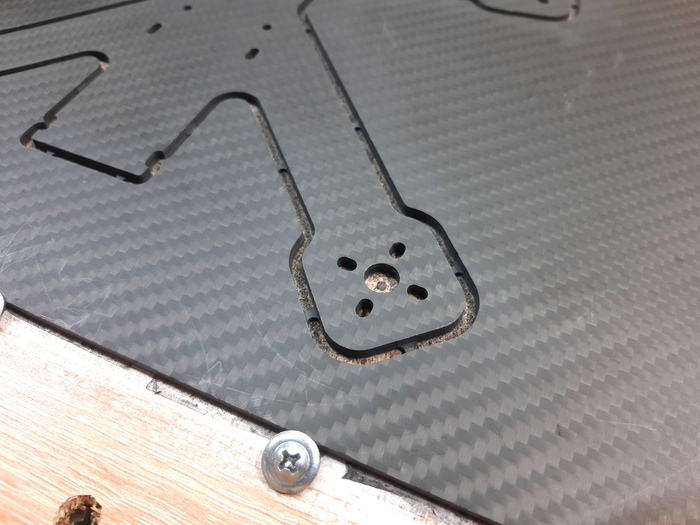
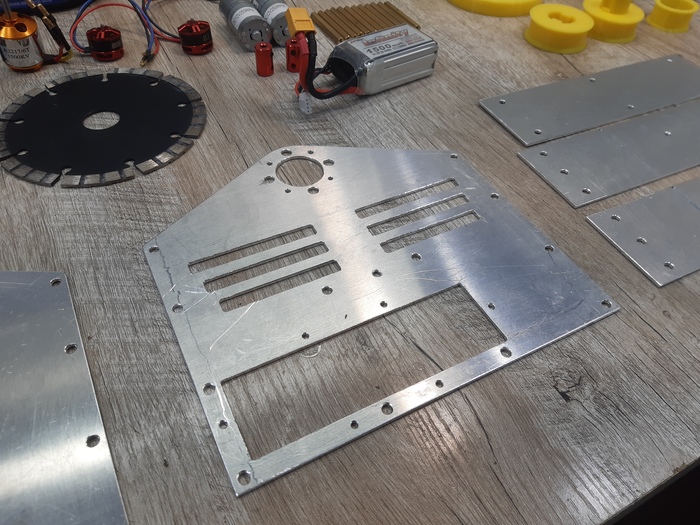
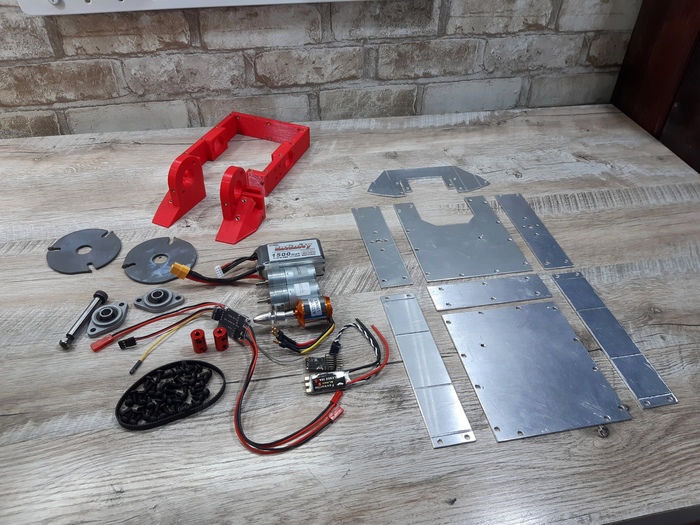
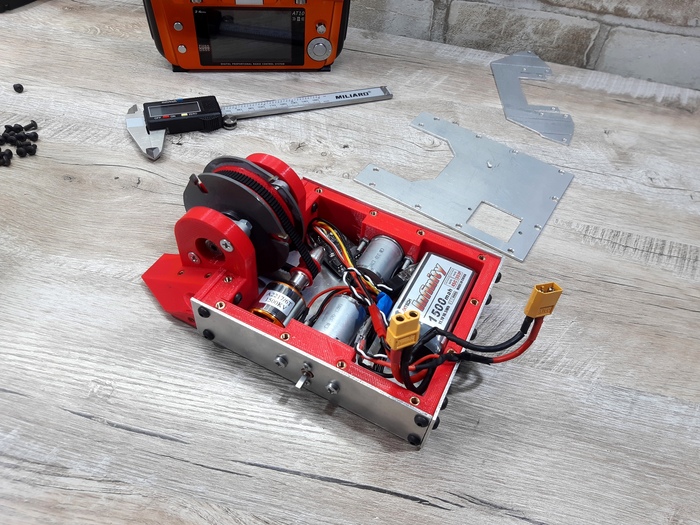
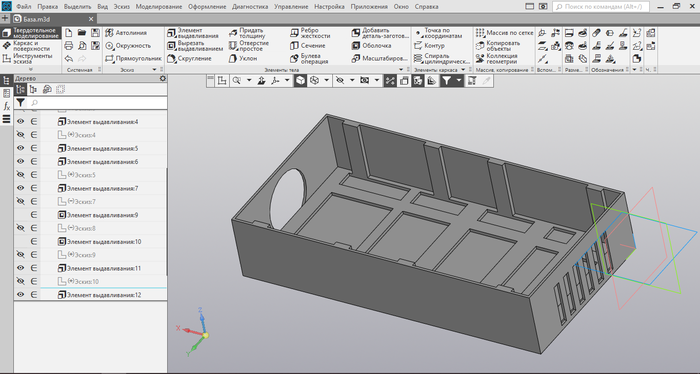
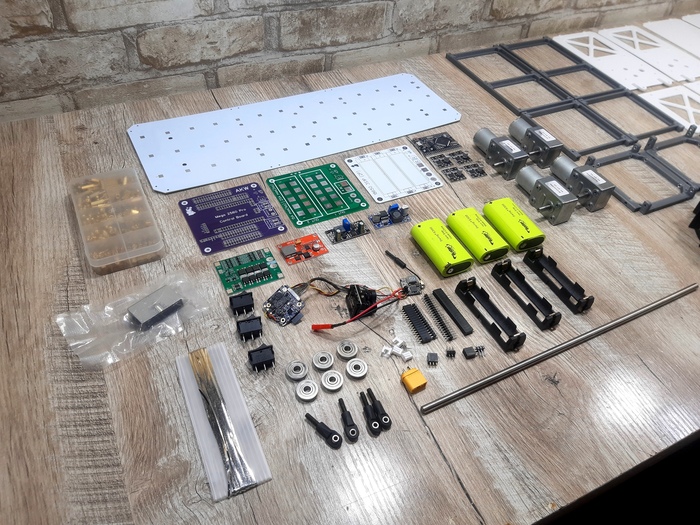
Используемые комплектующие и печатные детали.


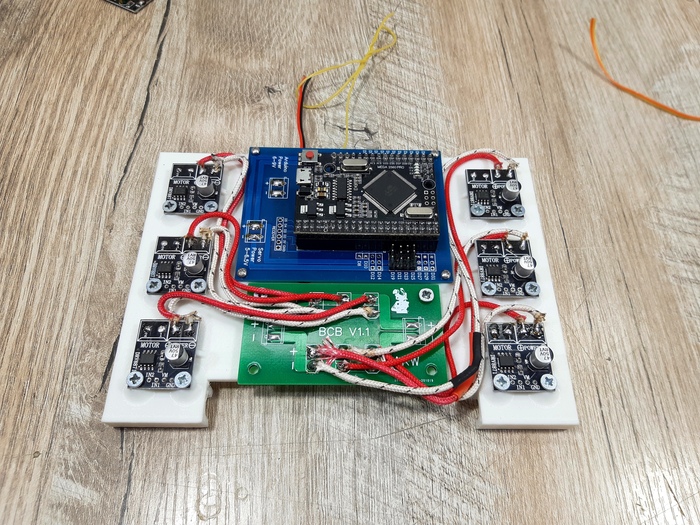
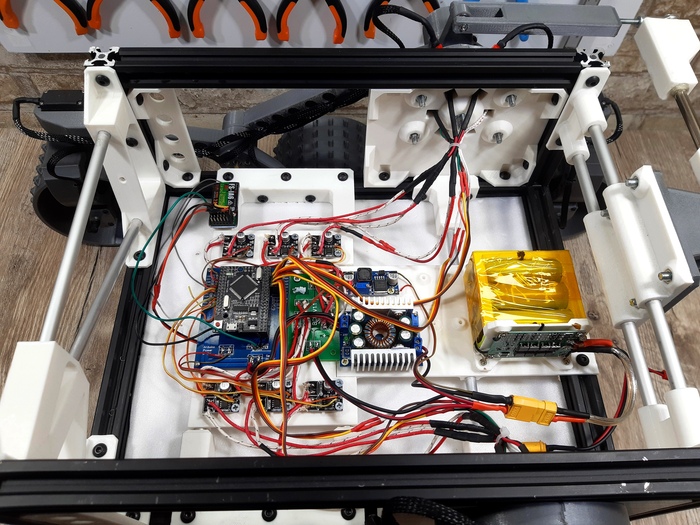
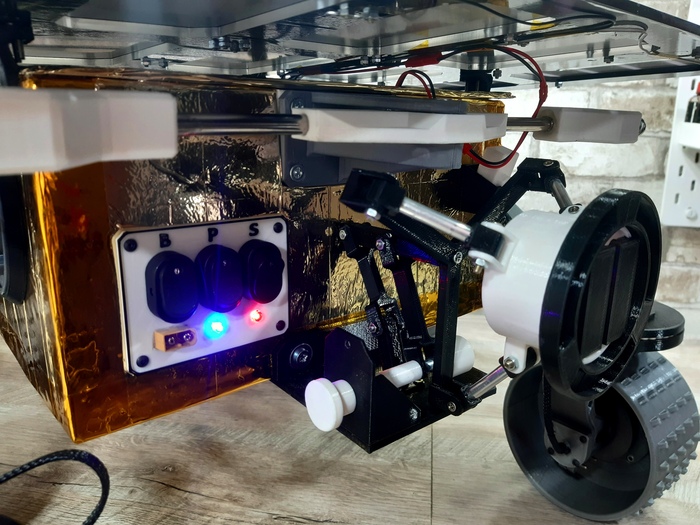
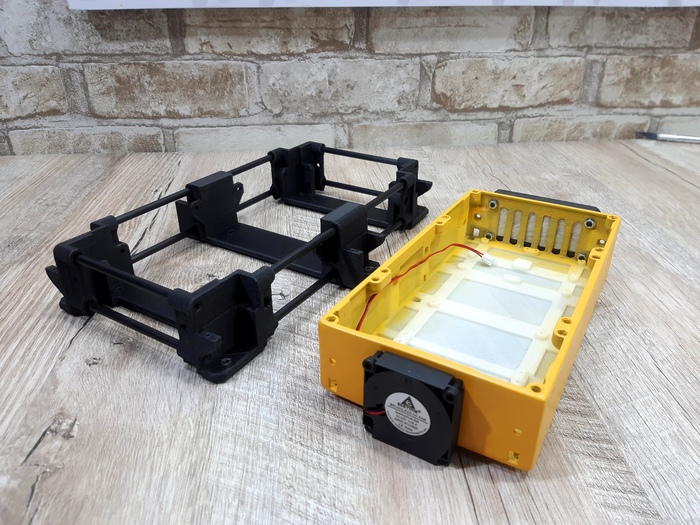
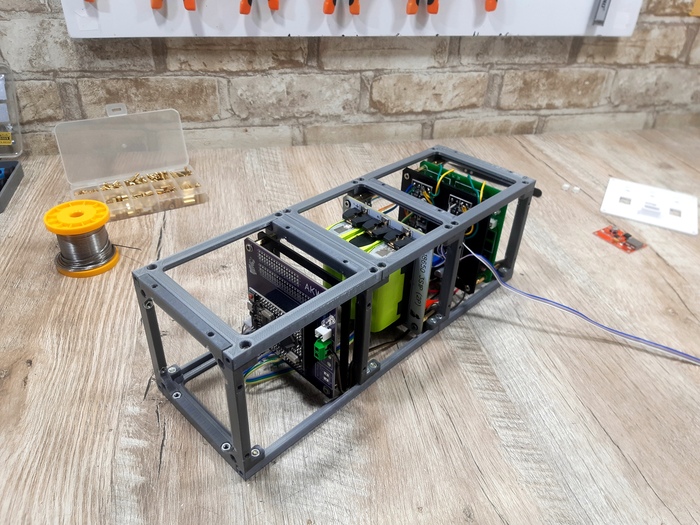
Платы коммутации для ПУ, АКБ и плату распределения питания делал на манер тех, что устанавливают в настоящие кубсаты.

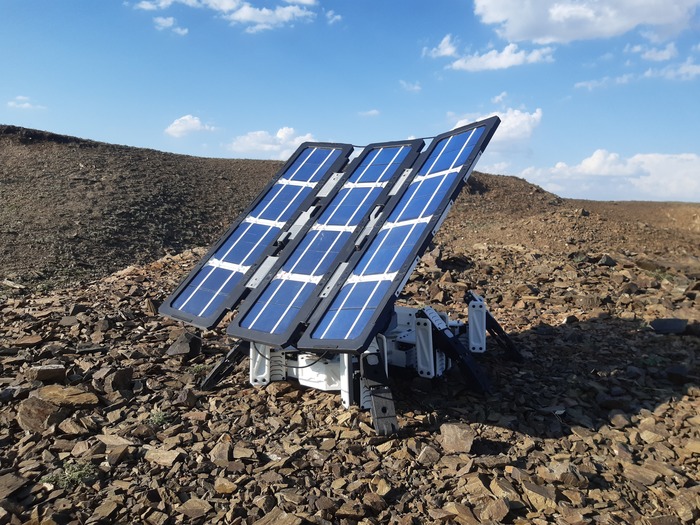
Солнечная панель состоит из 39 элементов соединённых последовательно. На выходе имеем 21 вольт, но видимо попалось несколько бракованных элементов, из за чего ток она выдёт очень низкий. В любом случае, при таких небольщих размерах, и с такими дешёвыми элементами с Али, толку от неё будет не много. Но всё же в следующих моделях панели тоже будут присутствовать, там и будем разбираться с током, и с покрытием элементов для их защиты.

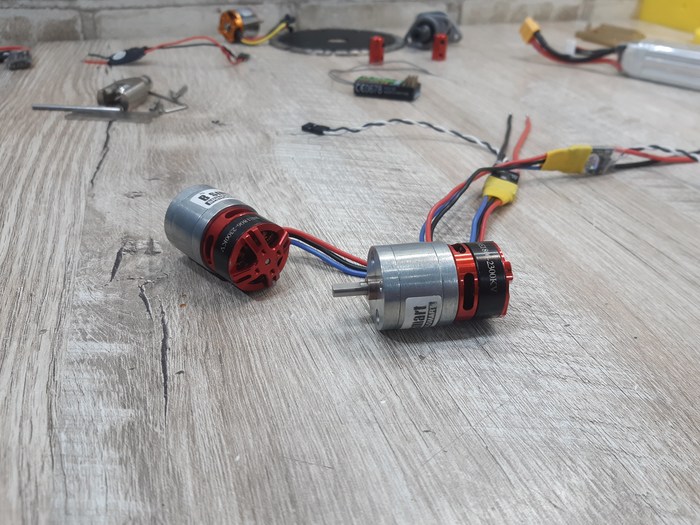
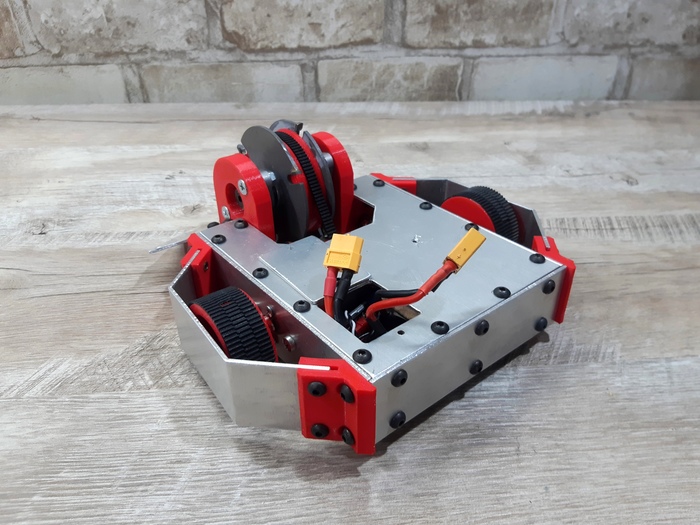
Изначально я использовал довольно оборотистые мотор-редукторы на 210 оборотов в минуту, которые были предназначены для другого проекта. В итоге крутящего момента сильно не хватало, и пришлось их заменить на подобные, но с одним валом и всего на 18 оборотов в минуту, которые были под рукой.



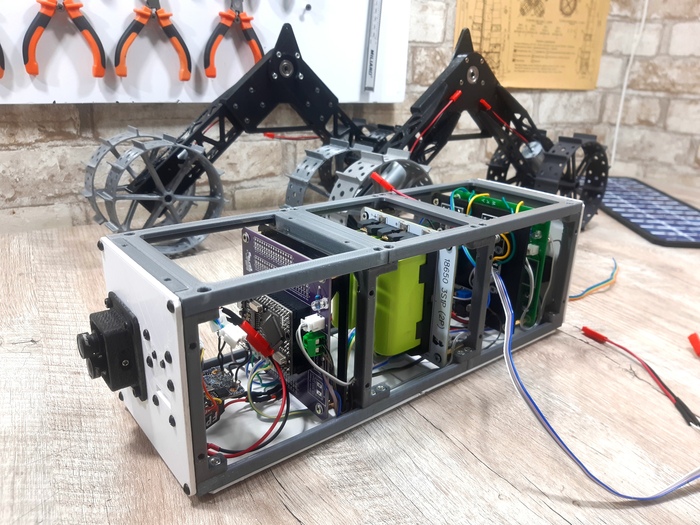


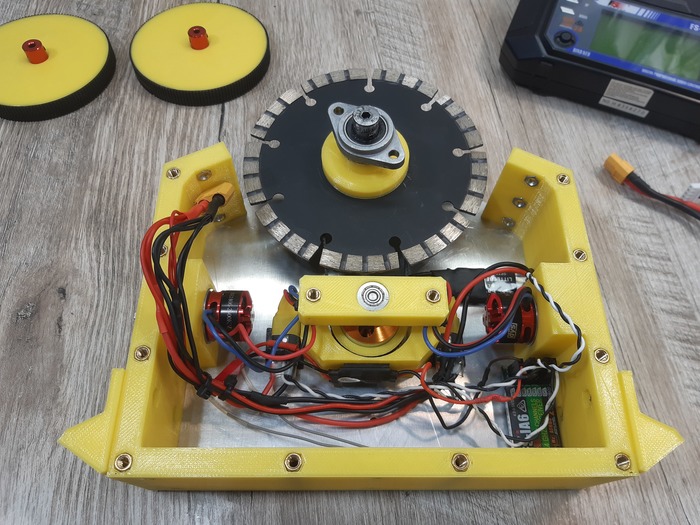
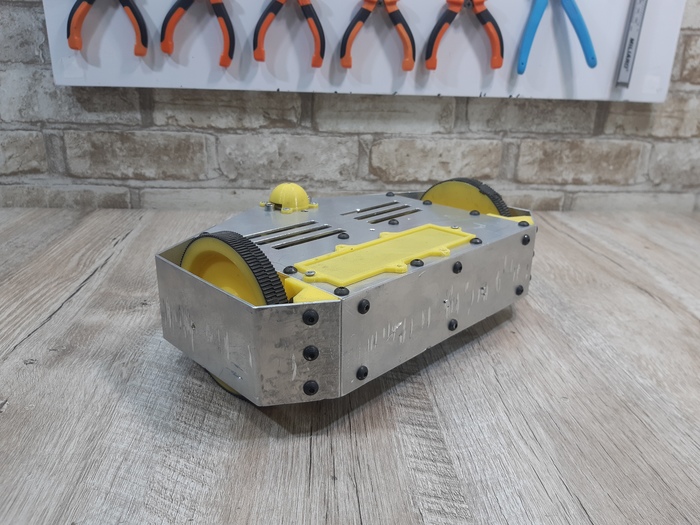
В общем, вот такая получилась модель. С новыми редукторами едет просто замечательно, хотя и не очень быстро. Впрочем, настоящий подобный луноход должен будет ползти ещё медленнее.
Спасибо что дочитали до конца =)
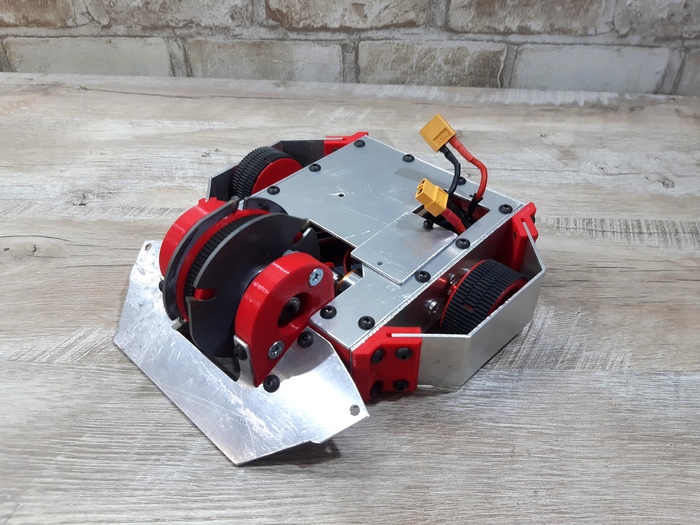
Ещё несколько фото напоследок: