Сюжетный бэд-трип
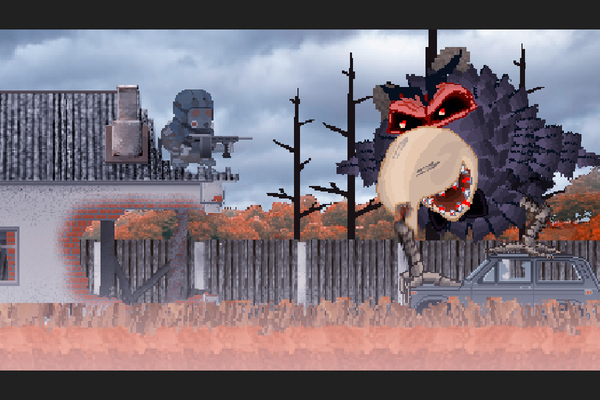
Вообще там должен был быть свободовец и куча "похмельных" шейдеров, но идеей хотелось поделиться уже сейчас.
Да, первый босс - эфемерный Каркарыч.
Показать полностью
Вообще там должен был быть свободовец и куча "похмельных" шейдеров, но идеей хотелось поделиться уже сейчас.
Да, первый босс - эфемерный Каркарыч.

Сидишь такой под "Солнечные дни" группы Кино, и так наваливается...
Давно образ в башке вертелся. Рисунок мой, тег моё.
P.S.: хочу в лето :(

Охайо, Пикабу.
Являюсь счастливым (хотя не факт) обладателем почти не рабочего чехословацкого баса Gala (ниже на мыле фото), который без нервотрепки можно использовать лишь как акустический музыкальный прибор. Всё лязгает, фонит, а восстанавливать смысла нет.

И вот, приехав обратно в Москву и оставив инструмент дома, я дико захотел достойный бас. Но так как у студента стипендии даже на еду не хватает, о покупке нового инструмента не может идти и речи. И посему появилась идея запилить себе свой бас.
Ближайшая возможность с достаточным количеством времени появится только летом, однако я уже сейчас начал составлять план своего идеального баса.
Общая концепция намелась сразу: за основу был взят корпус Ibanez Iceman-а (ну нравится мне этот армянский инструмент), составлена примерная схема, высчитаны размеры ладов, "заказана" у деда, работающего на пилораме охранником, древесина. Собираюсь запилить корпус из трёх заготовок, основные технологические ходы из расчета на два хамбакера оставив в средней из них.
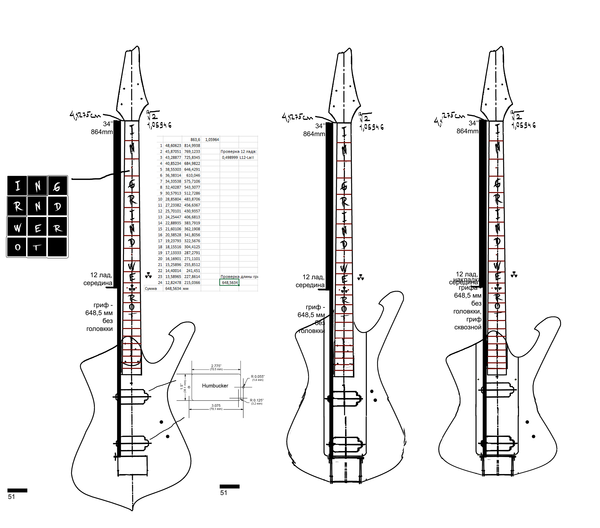
Вариант с самой мелкой декой отмелся сразу.
Сидя за компом, тут же захотел наваять примерный внешний вид. В случае с полноразмерным корпусом Айсмена получил это:
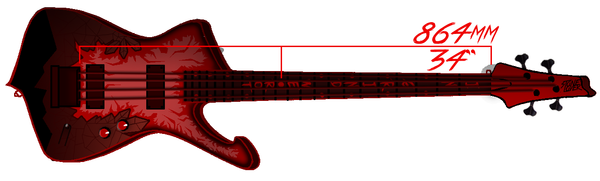
А вот и укороченый вариант с бриджем на границе деки.

Так вот, Пикабушечка. Я надеюсь только на прямоту своих рук и правильность расчётов, однако не знаю, где черпать информацию по строительству баса. Если у тебя есть какие-то книжки, которые стоит выкурить перед тем, как приступить, будь добр, поделись со мной, буду очень благодарен.
Ублюдок, мать твою, а ну иди сюда, говно собачье, с дури решил ко мне лезть, ты, засранец вонючий, мать твою, а? Ну иди сюда, попробуй меня трахнуть, я тебя сам трахну, ублюдок, онанист чертов, будь ты проклят; иди, идиот, трахать тебя и всю твою семью, говно собачье, жлоб вонючий, дерьмо, сука, падла; иди сюда, мерзавец, негодяй, гад; иди сюда ты, говно, жопа!

Автор - https://vk.com/stalker_crab

Здорово, народ!
Судя по тому, сколько людей ждёт этот пост, деваться особо некуда.
Как и обещал, рассказываю о том, каким образом проводилось вычисление положения частей рук относительно их крепления к туловищу.
Для начала вообще нужно уяснить, какие данные мы хотим дать игре, чтобы она произвела расчет. У нас всегда есть (по крайней мере, должна быть) х- и y-координата точки крепления руки к телу и длина частей руки. А вот дальше интереснее: если нам дан угол сочленения - то эта прямая кинематика и задача состоит в том, чтобы найти х- и y-координаты кисти воображаемой руки; ну а если даны эти самые координаты - то мы работаем с обратной (инверсной) кинематикой и найти нужно как раз углы, задающие положения сегментов в пространстве.
Как решать?
Для начала d - это расстояние от XY0 до XY1, но с небольшой оговоркой. Нельзя допустить, чтобы d было больше суммы длин наших сегментов, потому что при d равном этой величине мы получим максимально возможный угол - развернутый (180 градусов). Также резонно указать нижнюю границу, модуль разности длин сегментов вполне подойдет.
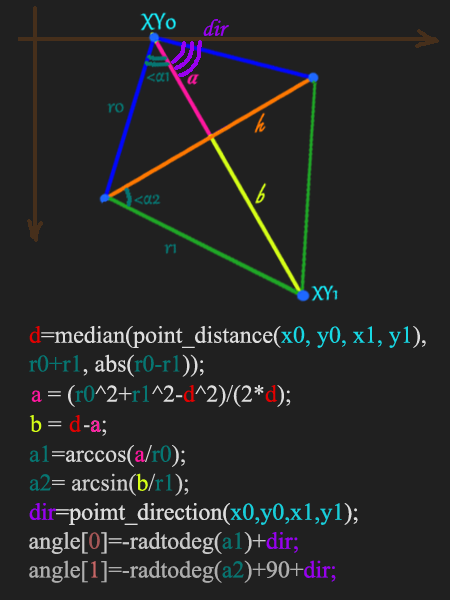
Получив а и b, работаем с прямоугольными треугольниками и получаем значения углов в радианах. Для того, чтобы их применить на ручках, остается только перевести их в градусную меру и прибавить к ним отклонение от оси ОХ (расчет углов ведется против часовой стрелки, поэтому чтобы направить ручки вниз, отнимаем их от дефолтных 0 градусов).
Важно: здесь мы никак не задаем ограничение на поворот вокруг XY0.
Для удобства можно вогнать это всё в скрипт:
GML: script get_angle
var x1=argument0, y1=argument1, x2=argument2, y2=argument3, r0=argument4, r1=argument5,GML: вызов скрипта get_angle (пример):
d=median(point_distance(x1, y1, x2, y2), r0+r1, max(r0, r1)-min(r0, r1);
var a, b, dir, angle;
a=(sqr(r0)-sqr(r1)+sqr(d))/(2*d)
b=d-a
dir=point_direction(x1, y1, x2, y2)
angle[0]=-radtodeg(arccos(a/r0)+dir
angle[1]=-radtodeg(arcsin(b/r1))+dir+90;
return angle
langle=get_angle(xl,yl,xr+lengthdir_x(38, arms_angle),yr+7+lengthdir_y(38, arms_angle)-8,r0,r1);
Возникает вопрос, а какие точки можно использовать в качестве XY1?
Такой скрипт можно использовать для разных целей.
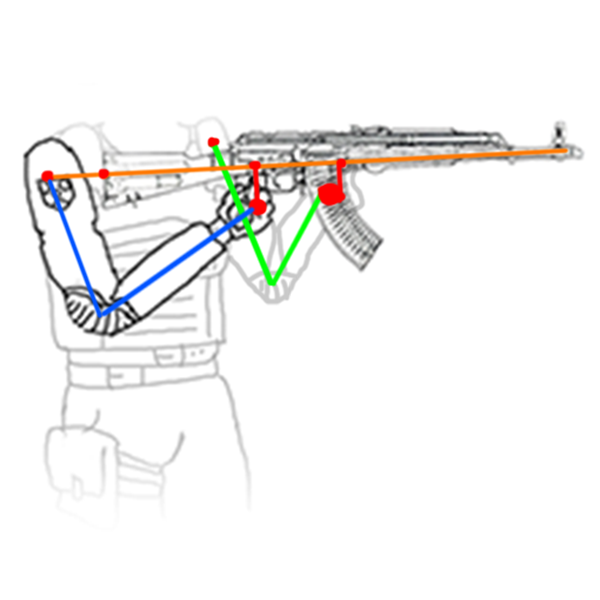
Вот, допустим, нам нужно, чтобы игрок держал автомат с упором к плечу. В таком случае естественно, что он будет держаться руками на рукоятку и цевье/магазин.
Если упором является плечо, то резонно будет осью считать саму точку упора. Оружие будет вращаться вслед за мышью по этой оси.
Например, для правой руки с координатами крепления rx1,ry1, вызов скрипта будет выглядеть так:
GML: get_angle для правой руки, отрисовка:
rangle=get_angle(xr,yr,xr+lengthdir_x(30, arms_angle),yr+lengthdir_y(30, arms_angle),r0,r1)
Xright=xr+lengthdir_x(r0, rangle[0])*player_xscale;
Yright=yr+lengthdir_y(r0, rangle[0]);
draw_sprite_ext(kombineson[4], 1, Xright, yr+lengthdir_y(l1, rangle[0])+sinready, 1, 1, rangle[1], c_white, 1)
draw_sprite_ext(kombineson[4], 0, xr, yr+sinready, 1, 1, rangle[0], c_white, 1)
Где 30 - это длина в пикселях от плечевого упора до рукоятки, за которую держится кисть.
Что примечательно, левая рука при прибавлении к координатам lx1,ly1 поправки будет ориентироваться на место крепления правой руки, так как ось вращения автомата с самой левой рукой никакой связи, кроме как точки lx2,ly2, не имеет:
GML: get_angle для левой руки, отрисовка:
langle=get_angle(xl,yl,xr+lengthdir_x(38, arms_angle),yr+7+lengthdir_y(38, arms_angle)-8,r0,r1)
Xleft=xl+lengthdir_x(r0, langle[0])*player_xscale;
Yleft=yl+lengthdir_y(r0, langle[0]);
draw_sprite_ext(kombineson[3], 0, xl, yl+sinready, 1, 1, langle[0], c_white, 1)
draw_sprite_ext(kombineson[3], 1, Xleft, Yleft+sinready, 1, 1, langle[1], c_white, 1)
Где 38 - это расстояние от плечевого упора до передней части магазина, к которой и крепится lx2,ly2.
Принципиальных отличий в алгоритме при реализации на других ЯП вроде как нет.
Надеюсь, пост окажется полезным для ваших собственных разработок!
Всем добра и до скорого!

Здорово, мои 35 подписчиков и все остальные!
Засиделся допоздна, но таки смог добить костную анимацию с обратной кинематикой.
Расчет ведет всего скрипт в пять строчек, которому необходимы лишь координаты плеча и кисти и длина частей, остальное всё делает сам (для кого-то мелочь, а для меня - достижение :D).