

Проектирую робота по пригототовлению пищи
4 поста
Музыка FEXFILLMANE, EvxlEmpxre, Triple6six - 152mm
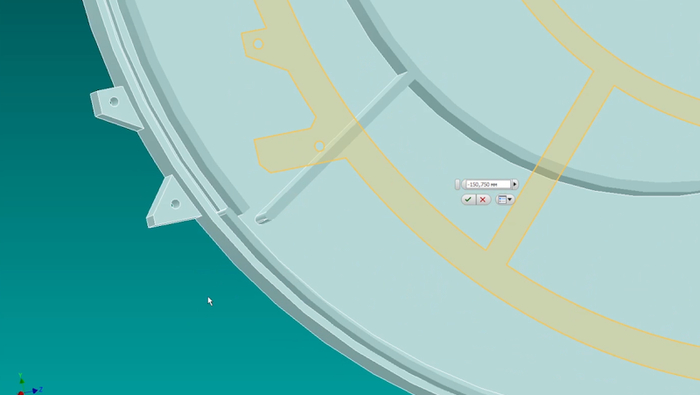
Также снизу конусом просверлил отверстие, для того чтобы потом распечатать втулку и подсоединить к ней шланг. Это нужно для отвода воды. Поскольку очищенная масса выходит однородным составом, то отверстия в районе 16 мм считаю достаточным.

Отвод воды в промышленных картофелечистках
Для того чтобы корнеплоды, которые туда попадают чистились, необходима однородная абразивная поверхность. Для того чтобы понять какой именно абразив нам нужен для успешной чистки, я использовал ручную овощечистку и те шкурки, которые получились, замерил штангенциркулем на толщину. Среднее значение составляет 1 миллиметр. Замерив эту поверхность с электрической картофелечисткой с абразивной ее частью, данные у меня совпали.




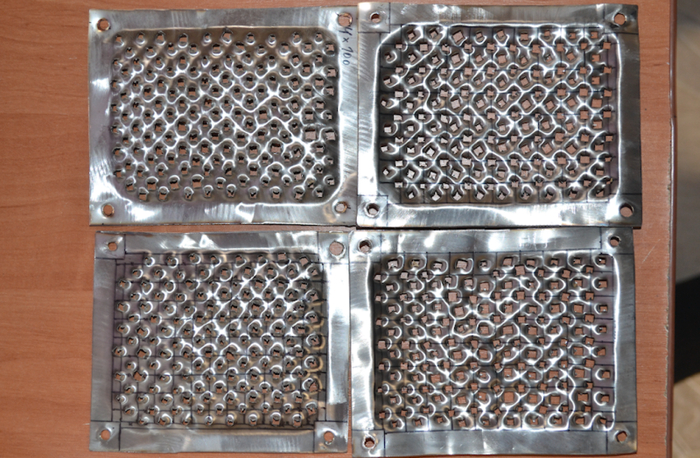
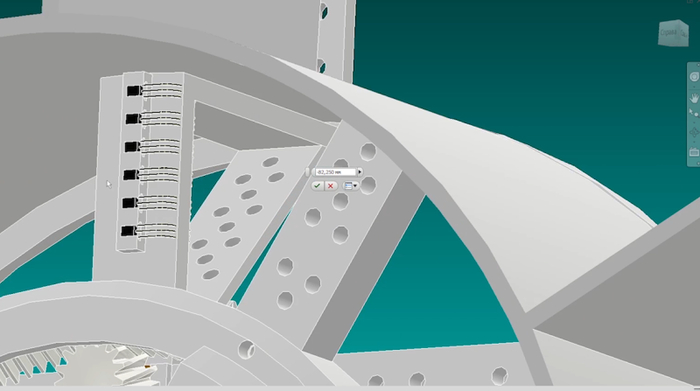
Нижние пластины, они же пластины диска, это пластины от электрической картофелечистки.

Диск с пластинами от картофелечистки

Пластины же, которые по стенкам я делал вручную.
Забегая наперед скажу, все ручные металлические изделия которые я использовал и изготавливал, все они из пищевой нержавейки AISI 304. О самом процессе изготовления в домашних условиях я расскажу уже в другом посте, поскольку сам процесс сборки это отдельная интересная тема.
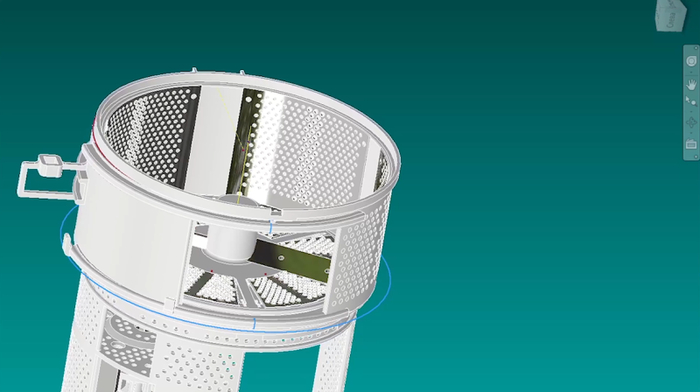
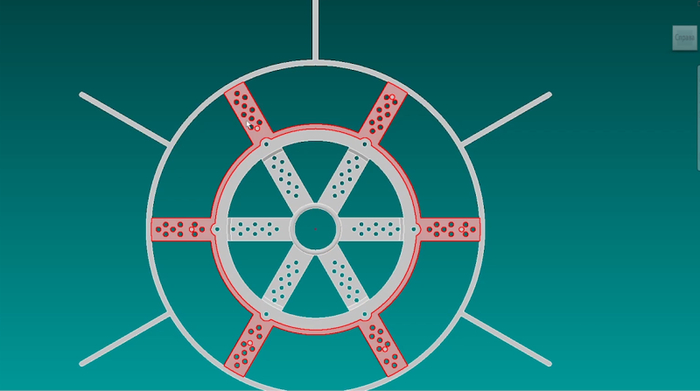
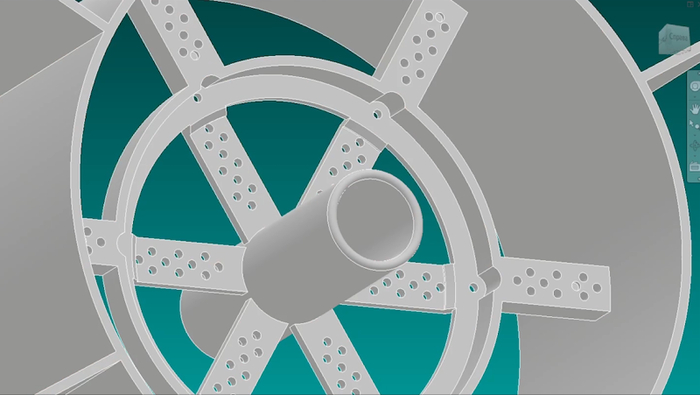
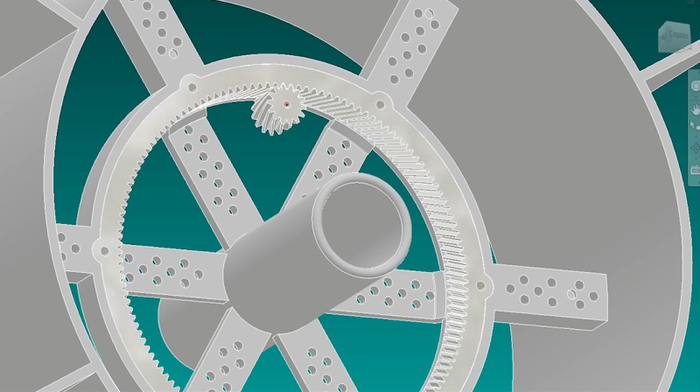
Сам диск, который вращает продукты, он является стандартным для электрической картофелечистки. Единственный момент - я добавил небольшое усиление в виде подкидывателей, поскольку в промышленных овощечистках сам диск не является прямым, то есть в форме диска, а немножко изогнутый. Это сделано для того, чтобы подкидывать продукт внутри, тем самым ускоряя перемешивание и следственно саму чистку продуктов.

Подкидыватели в диске промышленной картофелечистки
Подкидыватели в бытовой версии
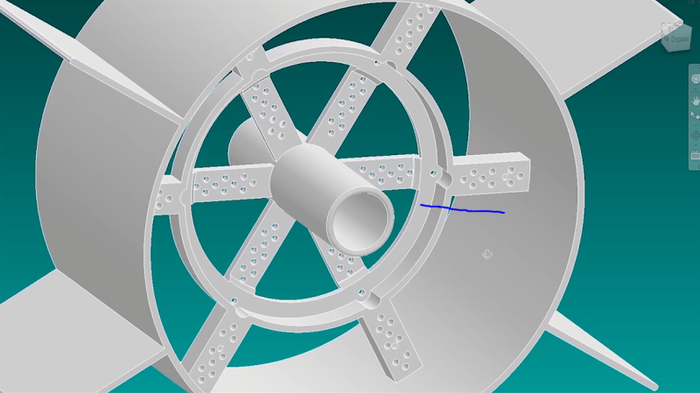
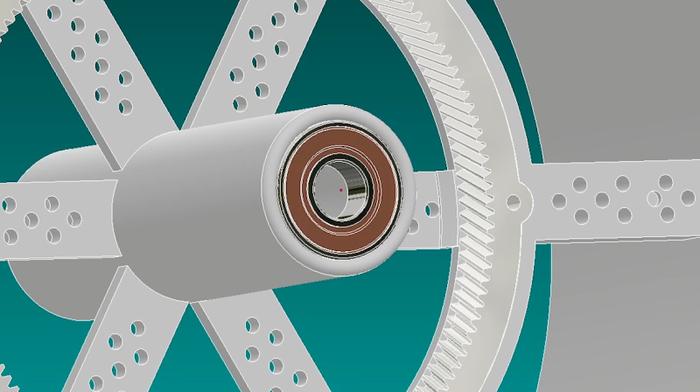
Также во внутренней части диска имеется переходник на мотор-редуктор, точнее на сам редуктор.
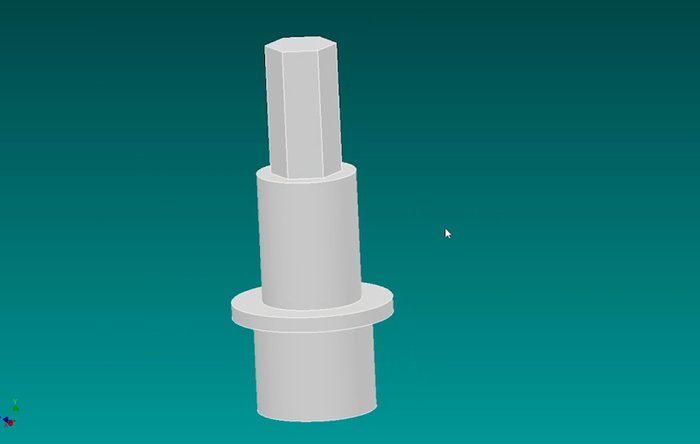
Переходник на мотор-редуктор
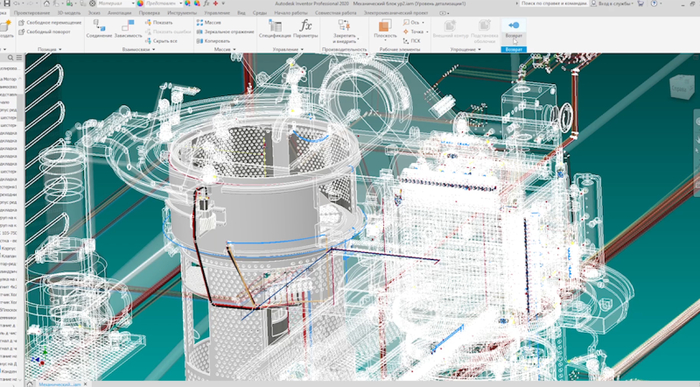
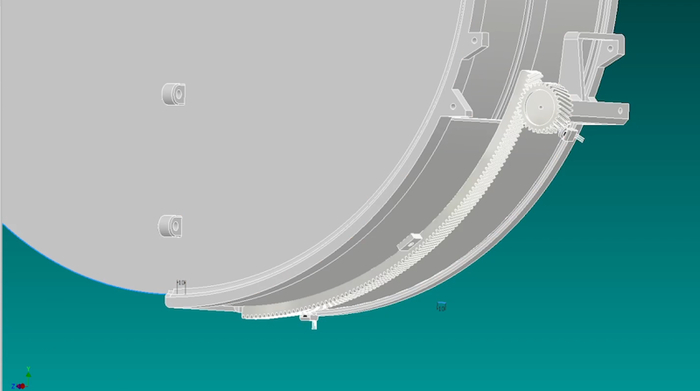
Форма клапана и его управление было создано аналогичным принципом, как у клапана блока хранения распределения, то есть сам клапан, как и рейка, которая им движет, она повторяет геометрию самой камеры, тем самым экономит пространство. Возникает логичный вопрос, а зачем вообще нужен этот клапан? Для понимания этого момента представьте себе следующее: перед тем как продукты попадают в картофелечистку, она уже начинает раскручиваться, и в уже раскрученный диск постепенно поступают продукты, это нужно для того, чтобы уменьшить пусковые токи, тем самым снижая электрическую нагрузку на сам мотор.

Что может произойти в противном случае
Для того что бы понять что такое пусковой ток, представьте себе следующее: стоит человек со строительной тачкой полной песка - энергии на то, что бы сдвинуть эту тачку потребуется раза в 3-4 больше, чем если бы человек шёл с изначально пустой тачкой, а во время движения постепенно в эту тачку насыпали бы песок. Так же и с нагрузкой двигателя в камере картофелечистки, только вместо тачки камера с картофелем.
Далее отрабатывая определенный цикл, по заранее заданному времени, начинает открываться клапан и центробежные силы начинают выкидывать эти продукты уже в другой узел, тем самым помогая нам выгрузить камеру без участия человека.

Центробежные силы

Другой пример
Далее отрабатывая определенный цикл по заранее заданному времени, начинает открываться клапан и центробежные силы начинают выкидывать эти продукты уже в другой узел, тем самым помогая нам выгрузить камеру без участия человека.
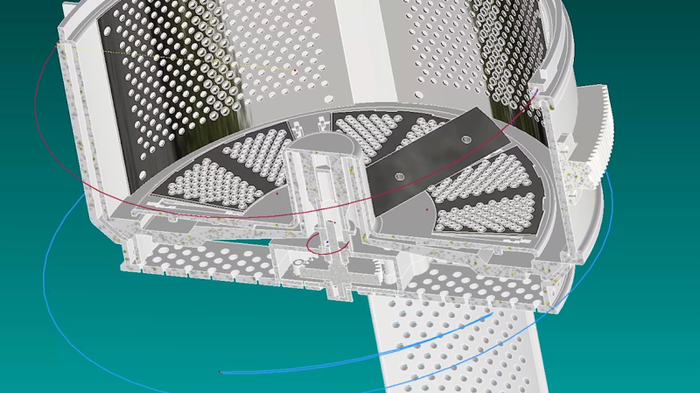
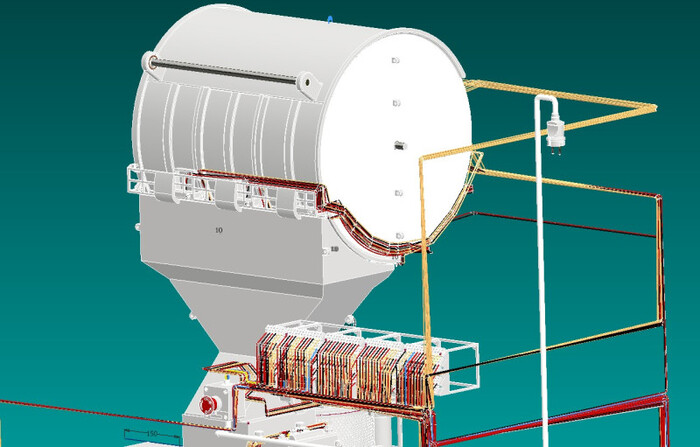
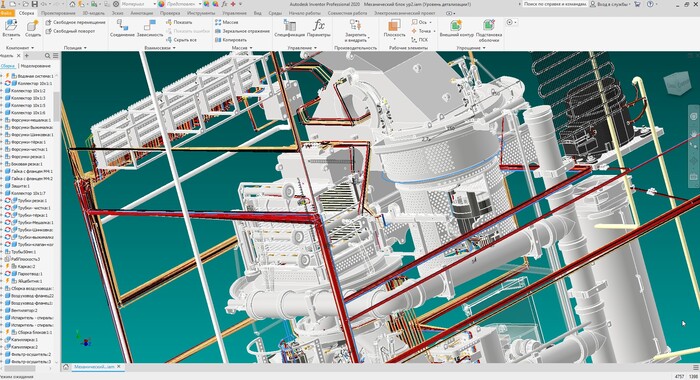
Вид овощечистки в общей системе
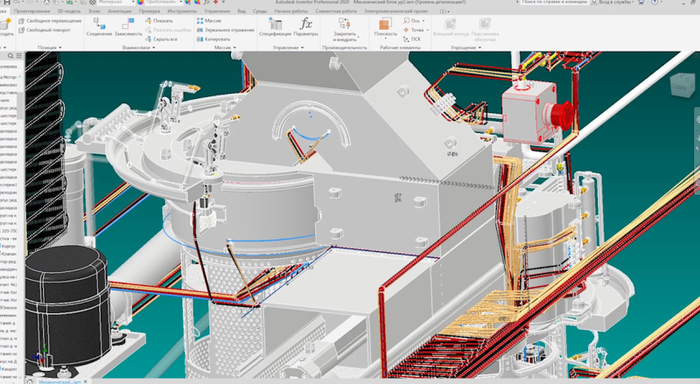
Продукты из овощечистки попадают в мультирезку
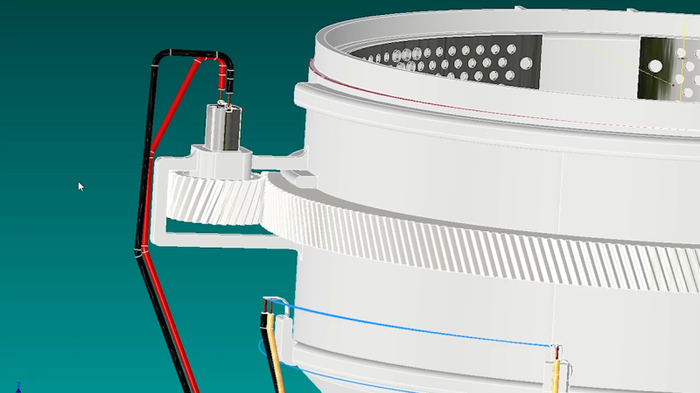
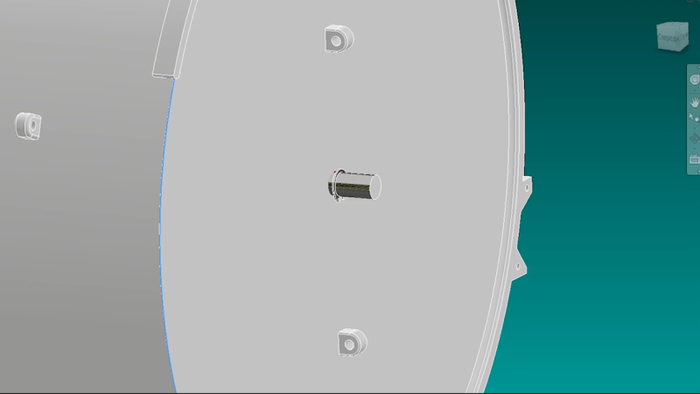
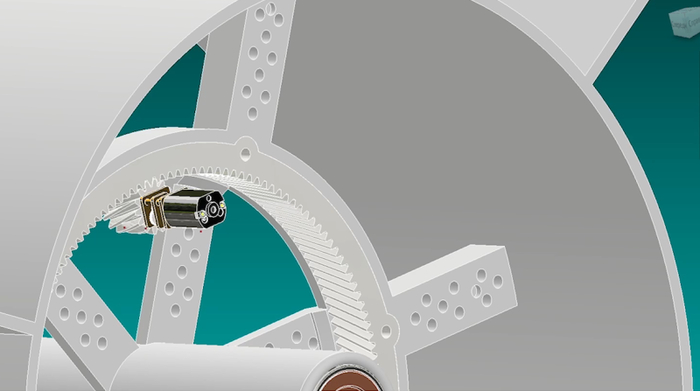
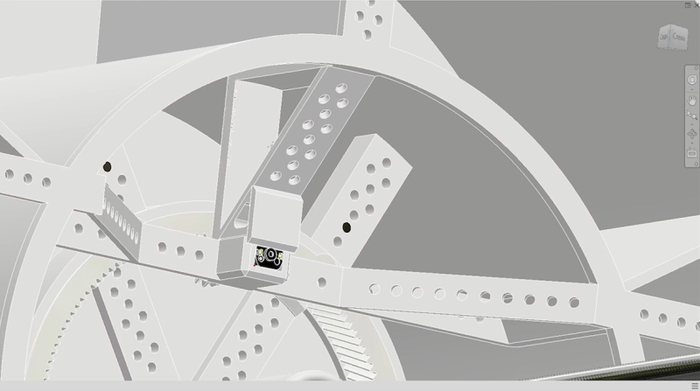
Данный клапан управляется 6-ти вольтовым мотор редуктором.
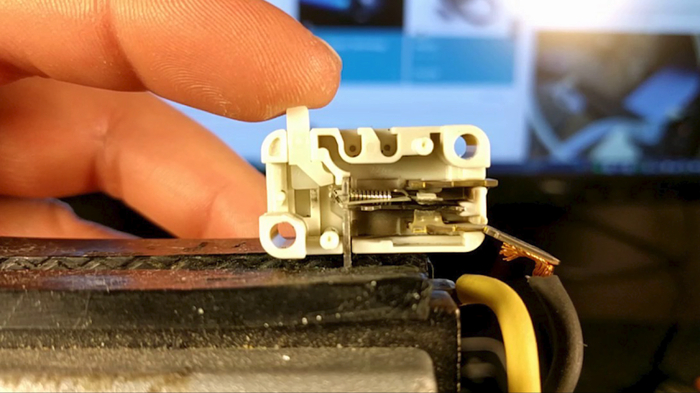
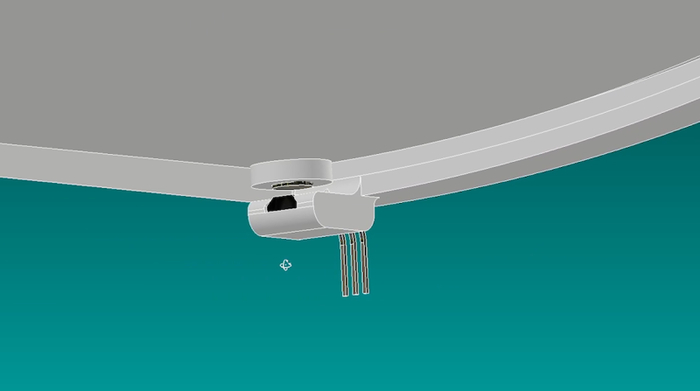
Для того чтобы мотор понимал когда ему остановиться была использована стандартная схема в виде датчика Холла и магнита, где магнит располагается на движущемся элементе, то есть в самом клапане, а датчик холла на основном корпусе. Регистрируя изменения магнитного поля, сам датчик подает сигнал на остановку двигателя.
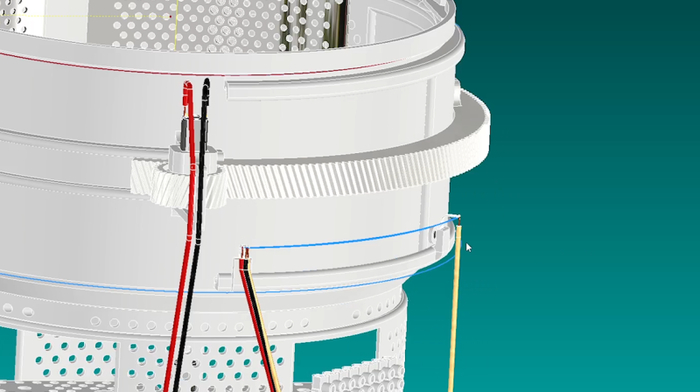
Связка 1 магнит — 2 датчика Холла
Естественно у вас может возникнуть вопрос, а что делать с глазками картофеля, которые данный узел до конца не сможет вычистить? Ответ на это следующий. Эта проблема решаема, я знаю как должен выглядеть дополнительный узел, но здесь его нету. На это есть несколько причин: само решение данной проблемы, но мне пришло не сразу и в это время я занимался уже другой частью данного проекта.
Вторая причина — это отсутствие навыка, которым я пока что не владею. Это интеграция машинного зрения. Без машинного зрения решить данный вопрос будет проблематично, однако механическую составляющую узла я вижу и забегая наперед скажу, что он появится, так же, как и машинное зрение.
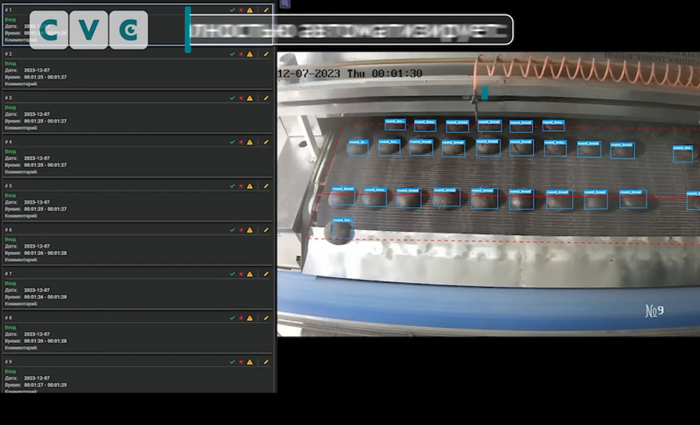
Необходима интеграция машинного зрения
Основная проблема данного вопроса заключается в том, что геометрия каждого корнеплода, ну к примеру картошки, она индивидуальная, это с одной стороны, с другой стороны появление глазков с индивидуальной геометрией каждого картофеля, она является чисто случайной составляющей, это основная причина того, почему решение данного вопроса не пришло не сразу.
Забегая наперед, скажу следующее, следующий прототип, который я планирую сделать, он будет размером не с холодильник, а со стиральную машину, при сохранении того же функционала + машинное зрение, почему собственно я топлю за интеграцию машинного зрения, конкретно в данном проекте.
Поскольку данный проект решает практически 90% механических задач, то на оставшиеся 10% можно добавлять специальные небольшие модули, к примеру это модуль работы с кондитерскими изделиями, с мучными изделиями, ну или, к примеру шаурма, роллы и прочее. То, что я сейчас сказал, это я забежал очень и очень далеко, а на данный момент вернемся конкретно к разбору данного проекта. Следующий узел, он же на мой взгляд один из самых сложных, это узел Мультирезки….
Материал сделан на основе канала «Сам себе инженер» видео того же содержания, только под атмосферу фонка и киберпанка, немножко приправленные ненормативной лексикой:
Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Более подробное обсуждение проекта: t.me/OMSK0443
Итак, в чём заключается основная фишка блока механической обработки? Если рассматривать данный процесс с механической точки зрения, то мы увидим ряд механических повторяющихся действий, а именно: чистка, резка, тёрка, шинковка, выдавливание, перемешивание. Если посмотреть на этот процесс поподробнее, то мы увидим некоторую связь.
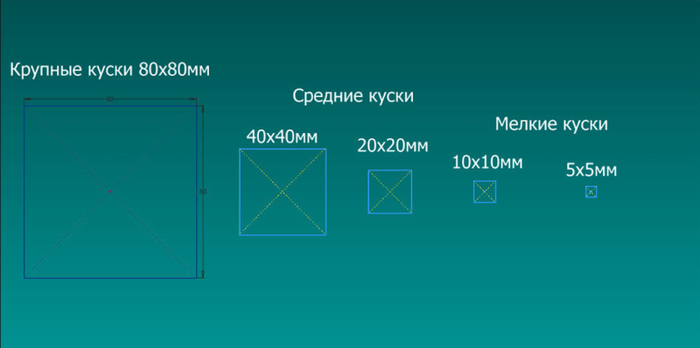
А именно, если у нас попадаются продукты, которые необходимо почистить, то мы их сначала чистим, а потом уже режем, но не наоборот. Те же продукты, которые чистить не надо, мы их режем на более мелкие фракции в зависимости от назначения. Каждая фракция имеет собственный размер и предназначена под конкретный узел, т.е. как правило крупные куски мы используем на терке, т.е. мы не будем в терке использовать мелкие куски, поскольку это неудобно.
Куски среднего размера предназначены или уже как готовый ингредиент, то есть на супы, на фруктовые салаты или еще их делают под шинковку. Мелкие же куски мы используем в основном в качестве салатов, к примеру это оливье, то есть мы не будем брать мелкие куски, а потом их тереть на терке, для шинковки это тоже является избыточным. Экспериментальным путем я выявил, что средний размер крупного куска составляет в районе 8 см, средний кусок 2−4 см, мелкие куски 5 мм.
Понимая это, мы можем расположить узлы вертикально, таким образом, что ингредиенты будут перетекать от одного узла к другому. То есть, получается, что гравитация выполняет половину работы, ингредиенты поступая от блока хранения распределения, в зависимости от прописанного пути, каждой ячейки, между узлами перестраиваются клапана в зависимости от конечной задачи.
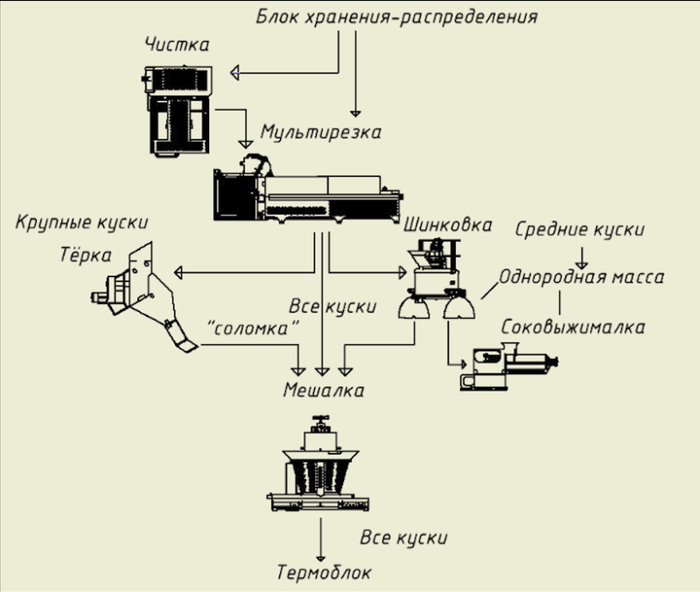
К примеру, сначала ингредиент идет на чистку, если нет, он проходит мимо нее, напрямую в резку. Узел резки является центральным узлом, через который проходят все ингредиенты. Если резка не нужна, то продукт проходит в холостом режиме.
После резки у ингредиента имеется три варианта, или он идет на терку, или на шинковку, или напрямую в узел перемешивания, который является вторым центральным узлом, через которого проходят все ингредиенты, который направляет готовые продукты в блок термической обработки или оставляет там же, если термическая обработка не требуется.
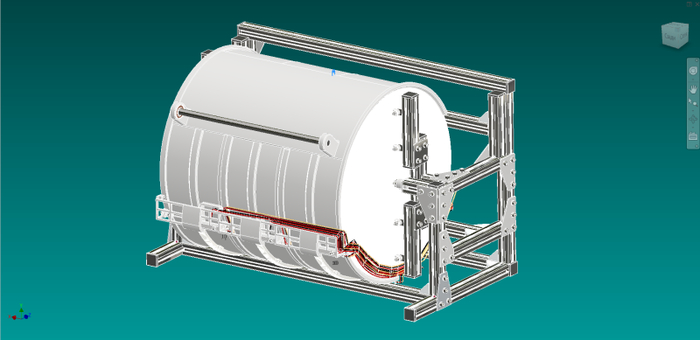
А теперь перейдем к модулю чистки. Сама схема овощечистки она далеко не новая и взята на основе промышленных аналогов, только адаптированная под бытовые объемы.

Промышленная картофелечистка

Бытовая версия
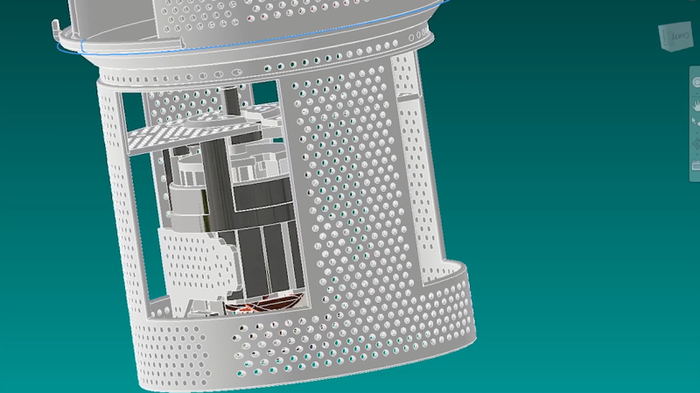
Основной принцип овощечистки заключается в следующем. В нижней части данного узла находится мотор-редуктор, который вращает диск.
В этом диске встроены специальные терки, а также снаружи основной камеры. Во время вращения диска в камеру поступают продукты, которые вращаются внутри камеры, непрерывно соприкасаясь с трущимися элементами наподобие плоской терки. Со временем эти продукты очищаются. Естественно перед этим выставляется необходимый таймер, с одновременным поступлением воды, которая смывает всю ненужную грязь.

Давайте же разберем каждый ее элемент подробнее.
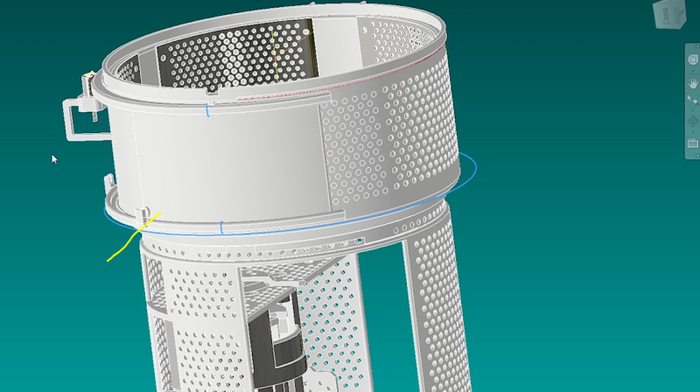
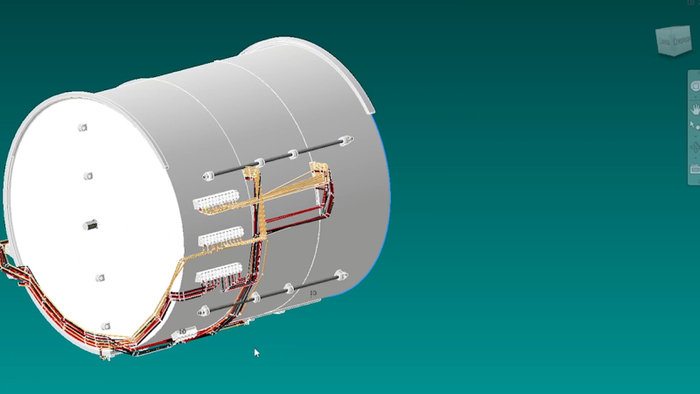
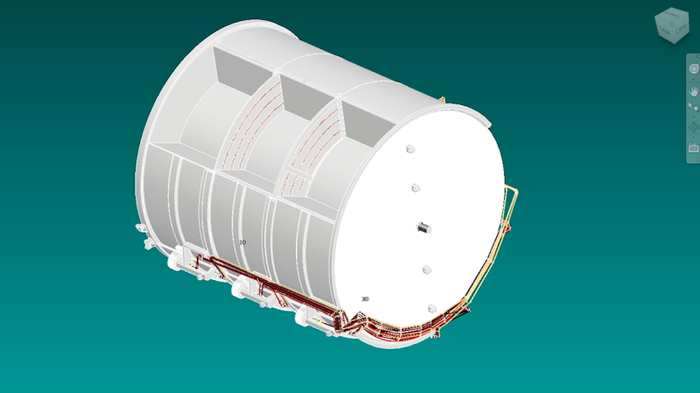
Основной корпус объединяет в себя мотор-редуктор и камеру чистки.

Вид с низу

Вид с верху

Основной корпус
Нижняя часть корпуса
Верхняя часть корпуса
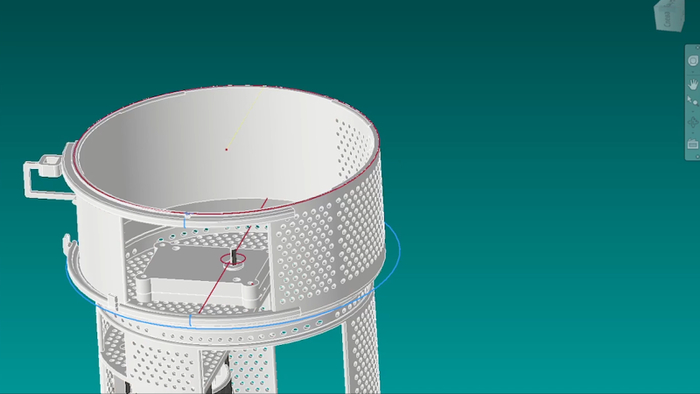
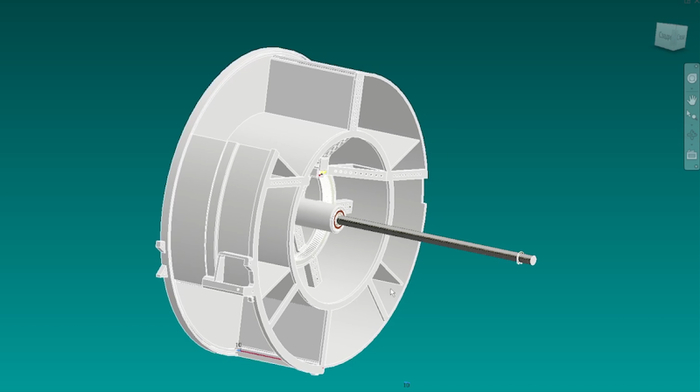
Верхняя камера с диском
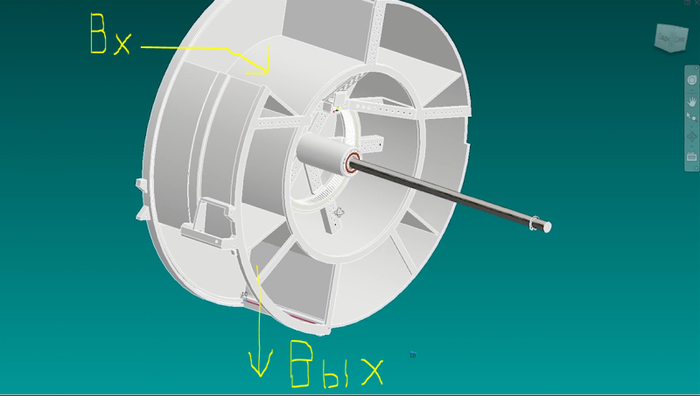
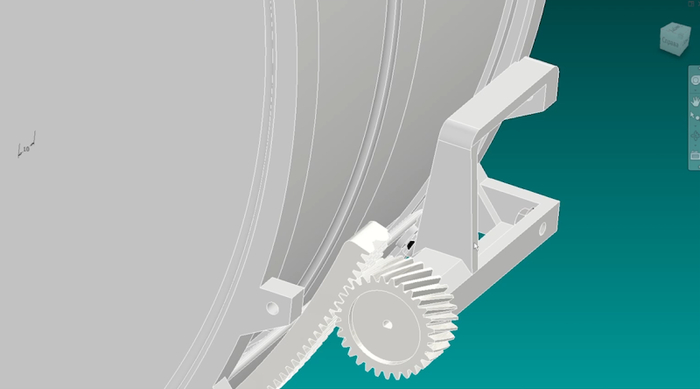
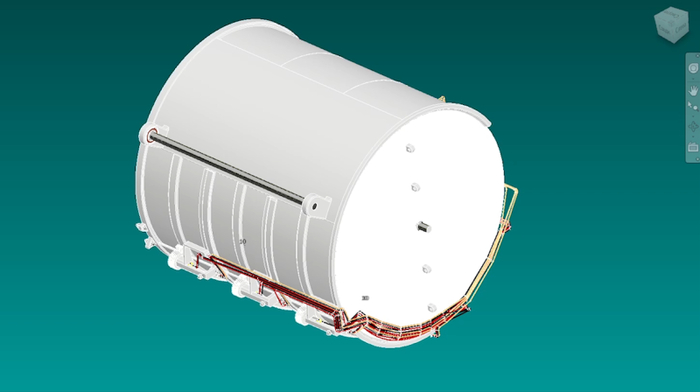
Особенность данного корпуса в том, что верхняя его часть не только повторяет геометрию самой камеры, но и повторяя принцип блока хранения распределения, он имеет в себе паз для управляющего клапана, к которому будет крепиться рейка, специальный выступ под эту же рейку и посадочное место под сам мотор-редуктор.
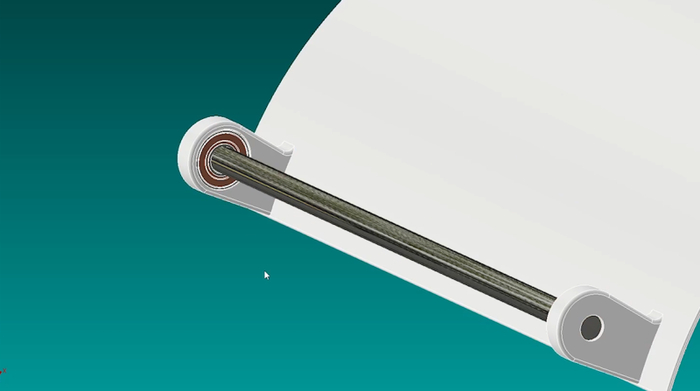
Клапан повторяет геометрию самой камеры
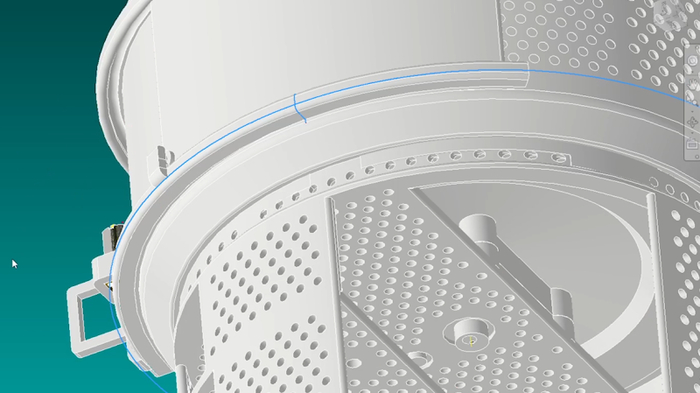
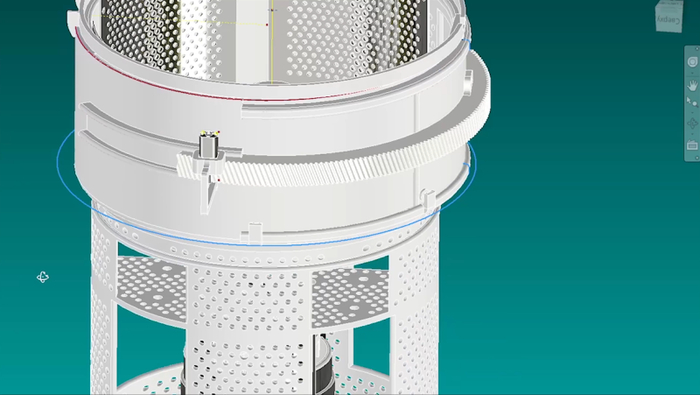
Рейка клапана
Саму овощечистку можно разделить на две части. Нижняя часть — это мотор-редуктор и верхняя часть, где происходит основной процесс обработки. Похожие узлы называются электрические картофелечистки, но широкого применения они не нашли.

Бытовая картофелечистка
На мой взгляд на это есть две причины. Первое самое очевидное, что все равно после такой обработки придется дополнительно продукты дорабатывать. К примеру, вырезать глазки у картофеля, которые данная чистка полностью не уберет их.

Второй неочевидный момент — это очень слабый мотор. Сам мотор - та картофелечистка что я покупал она имеет очень слабый мотор 75 ватт. Если кто не в курсе, то мотор 75 ватт это вообще ни о чем. То есть я буквально закинул туда 3−4 картошки и мотор уже остановился даже через редуктор. То есть я не понимал на кого это вообще рассчитано было и куда смотрели инженера.
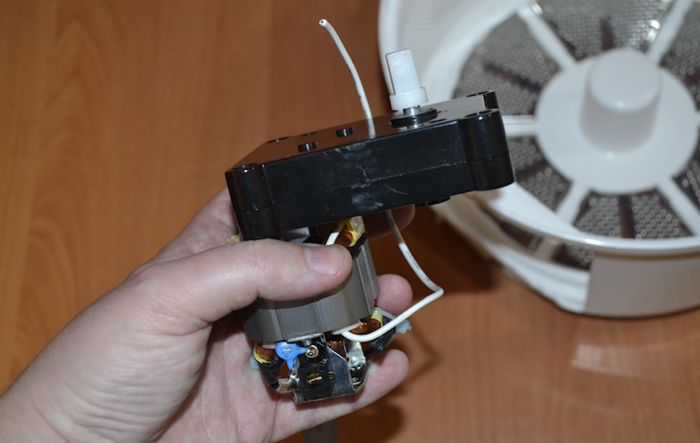
Мотор 75 Ватт — без комментариев!
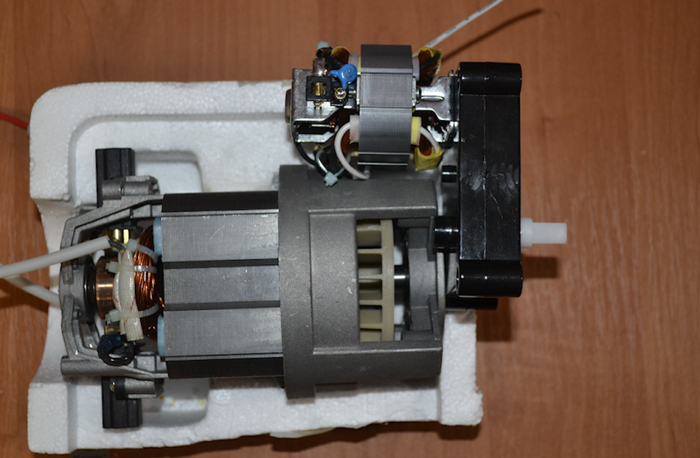
Поэтому первым делом, что я сделал - я поменял мотор мощностью в 10 раз больше. Это мотор на зернодробилку DK105-750. В народе достаточно распространенная штука.
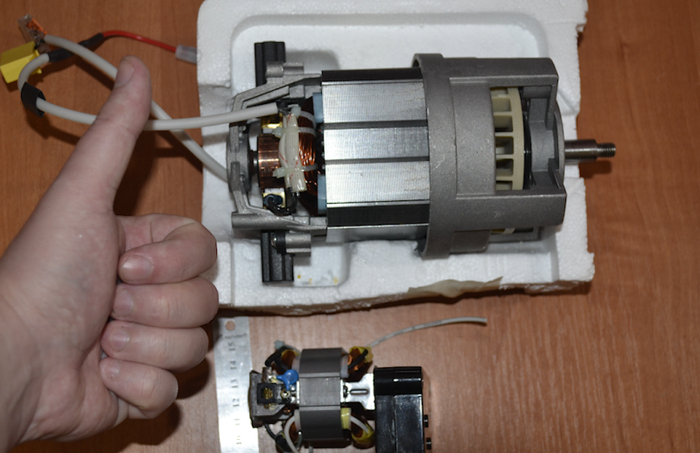
DK 105-750Вт

Зернодробилка
В качестве эксперимента редуктор решил оставить тот же. Единственное, что оставалось, это корректировать его обороты через регулятор мощности. В качестве образца был выбран симисторный регулятор мощности на 4 киловатта с питанием 220 вольт.
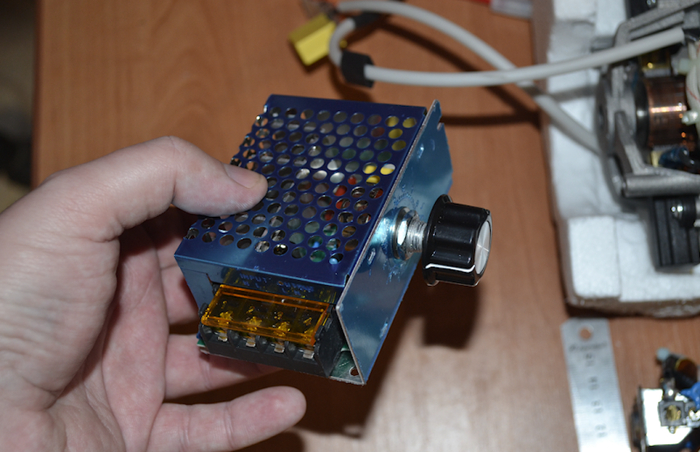
Симисторный регулятор мощности 4кВт 220В
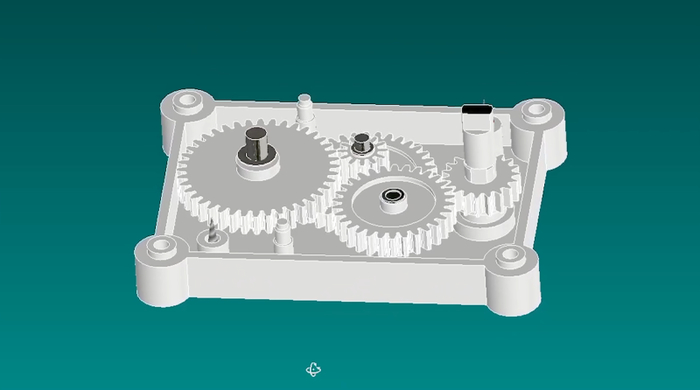
Сам редуктор представляет себя набор из четырех пластиковых шестеренок, которые механическим путем уменьшают скорость вращения двигателя и передают ее на диск овощечистки. Хотя лично я такого мнения, что при таком моторе этим шестеренкам будет п*зда, т.е. скорее всего сам редуктор нужно будет переделать, но поскольку редуктор у нас пока имеется в готовом виде, я решил его использовать. Смысл от того, что он будет валяться, а собрать новые мы всегда успеем.
В качестве основной емкости верхней камеры я использовал верхнюю часть электрической картуфеличистки. Основные изменения заключаются в том, что мне пришлось разрезать небольшое отверстие для того чтобы сделать там клапан.

Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Более подробное обсуждение проекта: t.me/OMSK0443
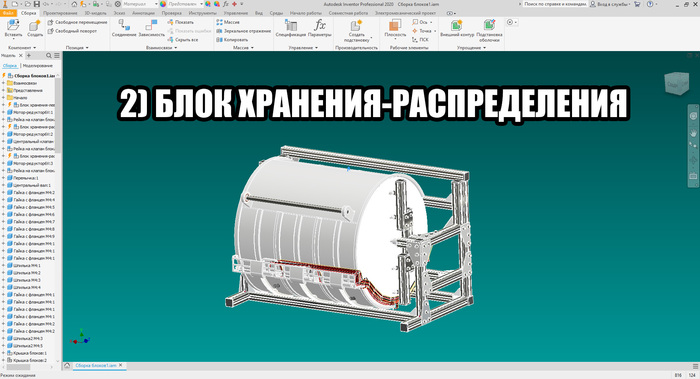
Общий принцип работы блока хранения и распределения заключается в следующем: человек выбирает для себя нужный рецепт, далее механизм предлагает, какой продукт в какую ячейку положить или человек назначает эти ячейки сам, если у него собственный рецепт. Далее распределив все продукты по ячейкам, человек забивает таймер. К примеру, человек заложил продукты вечером, а нужно, чтобы приготовилось завтра ближе к вечеру, то есть тогда, когда он придет после работы. То есть заложил, включил, таймер пошел, человек пришел – готовая еда.
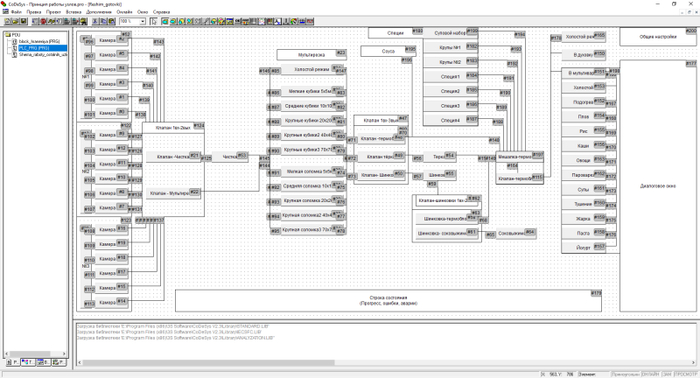
Прототип мнемосхемы — путь каждой ячейки в зависимости от механической операции
Все продукты делятся на три категории:
1) твердые (мясо, овощи)
2) жидкие (соуса)
3) сыпучие продукты (специи)
То есть - я их разделил на консистенции...
Данный блок - это блок твердых продуктов, под остальные продукты - имеются отдельные узлы, которые мы будем подробно разбирать позже, ну, а теперь приступим к подробному разбору всех деталей данного блока.
Общий вид
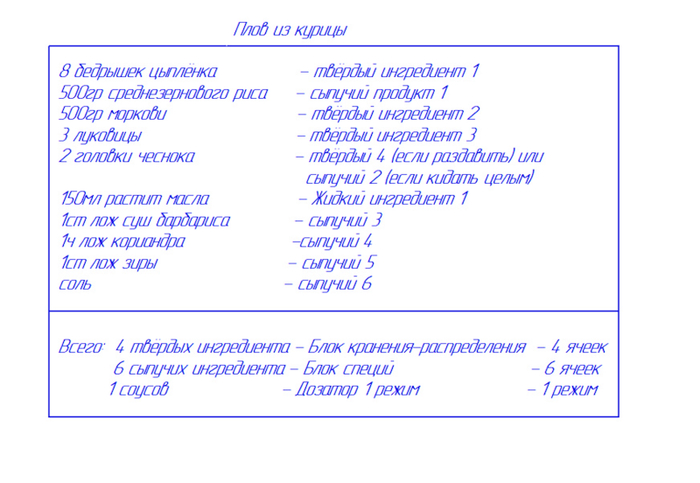
Начнем с ячеек и их размеров, перед тем как закладывать продукты необходимо выяснить, а какое вообще среднее количество ингредиентов приходится на один рецепт и какой размер этих ингредиентов?
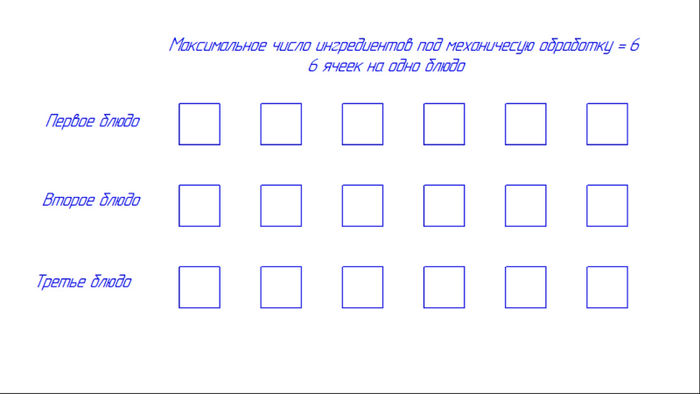
Было проведено два эксперимента. Первое я взял рецепты из книжки по мультиварки и посчитал максимальное количество ингредиентов на один рецепт, конкретно твёрдых продуктов под механическую обработку.
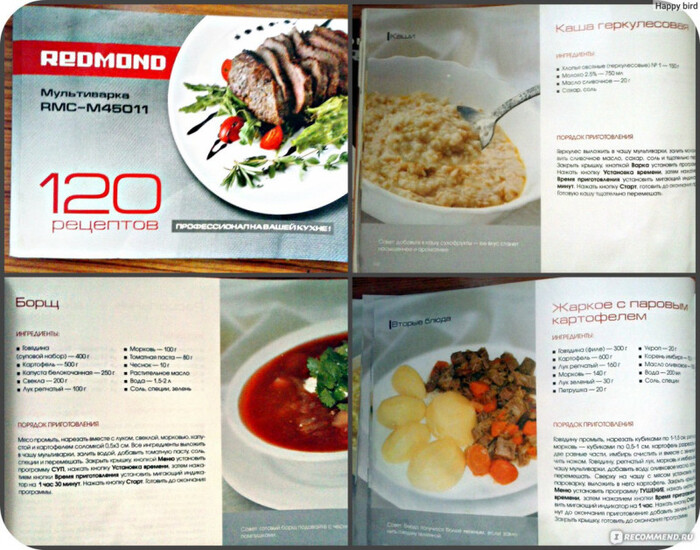
Второй практический эксперимент это был процесс готовки. Первый это борщ, второй это жареная картошка, третий это салат оливье. В процессе готовки я записывал на листе все ингредиенты, распределил их по категориям. Напротив каждого ингредиента писал тип механической операции, а также в какой контейнер он может залезть.
Напротив каждого ингредиента писал тип механической или термической операции
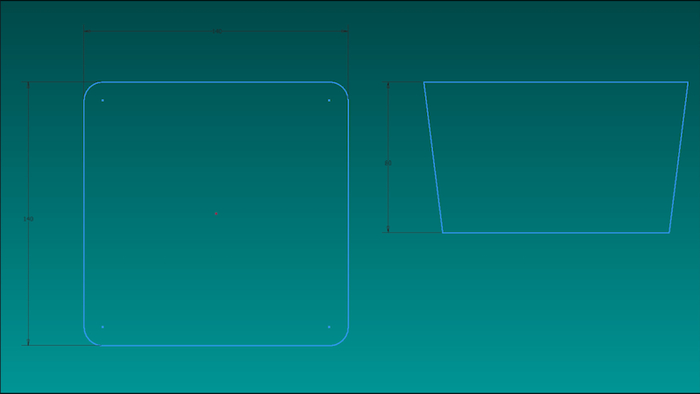
В качестве определения среднего размера ячейки под все ингредиенты я взял обычный набор контейнеров из фикс прайса.
Начал класть каждый ингредиент в контейнеры разного размера и выявил следующее среднее значение: Наиболее оптимальное значение ячейки является квадрат размерами 140 х 140 х 80 мм.
Поскольку максимальное количество ингредиентов в одном рецепте не превышает 6, то взяв это число в качестве максимального значения, я умножил это число на 3. То есть 6 ячеек на первое блюдо, 6 ячеек на второе и 6 на третье — в итоге 18 ячеек.
Основная сложность в разработке ячеек заключалась в сложности органов управления данными ячейками, поскольку каждая ячейка должна управляться отдельно.
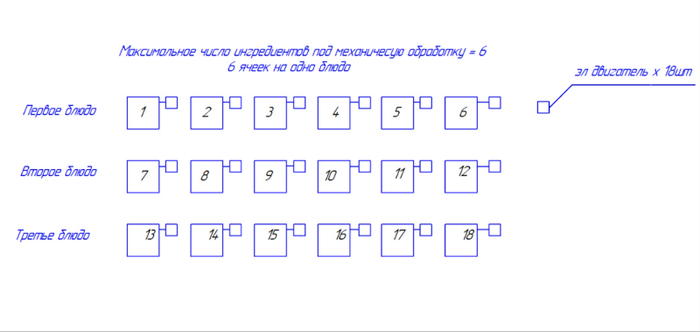
Чтобы уменьшить количество органов управления и решить данную техническую задачу, я использовал закон симметрии. Смотрите в чем прикол: поскольку количество ячеек у нас является четным с одной стороны, с другой стороны они одинакового размера, это позволило мне пространственно расположить их таким образом, чтобы в пространстве они были симметричны друг к другу.
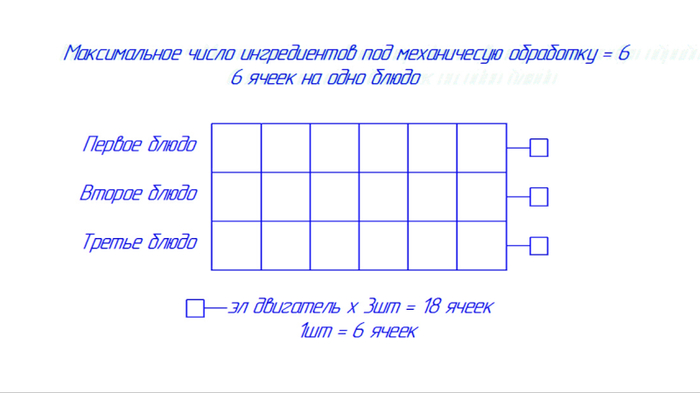
Один орган управления на 6 ячеек
То есть, по сути, это обычная геометрия. Тем самым я смог уменьшить количество органов управления с 18 до 3. Один орган управления на 6 ячеек, первое, второе, третье. Все эти ячейки я назвал мульти-ячейкой и выглядит она следующим образом:

Мультиячейка
Прошу обратить внимание на то, что по центру каждой ячейки внутри располагается упор, тем самым неся основную механическую нагрузку на себя, которая в свою очередь передает всю нагрузку на центр.
Упоры по центру ячейки
По центру этих упоров имеется специальный паз, он предназначен под зубчатую передачу.
Паз под коронную шестерню
Круглые отверстия в самих упорах несут себе функцию облегчения конструкции, но не все эти отверстия являются сквозными, но о них поговорим мы чуть попозже.
Для того чтобы вращать мультиячейки были использованы шестеренки с планетарным типом передачи, в которой есть две шестерни. Планетарная шестерня, она же малая неподвижная, и подвижная коронная шестерня.
Планетарная передача
Основную нагрузку от мультиячеек несут себе подшипники типа 6202, если я не ошибаюсь, то данные подшипники применяются в стартерах автомобилей, продаются в автомагазинах. Был прикол, когда я пришел в автомагазин за подшипниками и мне надо было сразу купить их 6 штук. Тетя в ах*е на меня посмотрела, спросила зачем тебе столько подшипников. Ну говорю робота собираю, у нее Windows еще больше в ошибку вышел, ну, а я довольный наличием подшипников пошел дальше.
Подшипники 6-202
В качестве основного опорного элемента был выбран вал в соответствии с внутренним диаметром подшипника 15 мм. Впоследствии оказалось, что сам вал был некалиброванный, т.е. наружный диаметр был немного разный, вследствие чего подшипники на вал насаживались по-разному. Если один заходил даже от руки, то другой пришлось забивать молотком.
На расстоянии 24 мм, по краям от вала, был создан небольшой надрез под стопорные кольца с внутренним диаметром 15 мм. Они предназначены для дополнительной фиксации внешнего корпуса.
Все это добро вращает 6-ти вольтовый мотор-редуктор. Редуктор был выбран не случайно, с минимальными оборотами, для того, чтобы сэкономить на драйверах. То есть, подал питание, он вращает именно с такой скоростью, с которой нам нужно. Конечно, можно было бы поставить мотор и помощнее, но я сделал ставку на то, что основную нагрузку несут на себе подшипники. То есть, к примеру, как с дверью. Когда человек открывает дверь, он не чувствует её веса, а основную нагрузку на себе несут петли. В нашей же ситуации основную нагрузку несут подшипники. Конечно вопрос о мощности мотора остается открытым, но я решил рискнуть именно по этой причине.
6V мотор-редуктор (70-100 об.мин)
Для того, чтобы двигатель понимал, когда ему останавливаться, нужны датчики. Поскольку датчики являются по сути нервной системой всего агрегата, то их выбор это достаточно непростой вопрос.
датчики — их тысячи
Поскольку датчики присутствуют именно в связке «движущийся и недвижущийся» элемент, и форма узлов разная, то возник вопрос не только об их надежности, но и компактном размере. Сначала думал поставить механические концевики, но их минус в том, что во-первых, они механические, то есть присутствуют движущиеся элементы в самом датчике, плюс относительно большой размер и много проводов, которые от них отходят.
механический концевик в разрезе

Слишком много всего для одного мотора.
С герконами почти такая же проблема, из всех возможных вариантов я остановился на датчиках Холла. Это небольшое твердотельное устройство, которое реагирует на магнитное поле. Он имеет габариты 4×4 мм, от него отходят всего 3 провода плюс ни одной движущейся детали. Поскольку во всем агрегате этих датчиков у меня оказалось в районе 96 штук, то это оказалось очень удачным решением. Естественно этот датчик ставится на все НЕПОДВИЖНЫЕ части, а на все подвижные части ставится магнит. Неодимовый магнит диаметром 4 мм. Как раз под размер самого датчика.
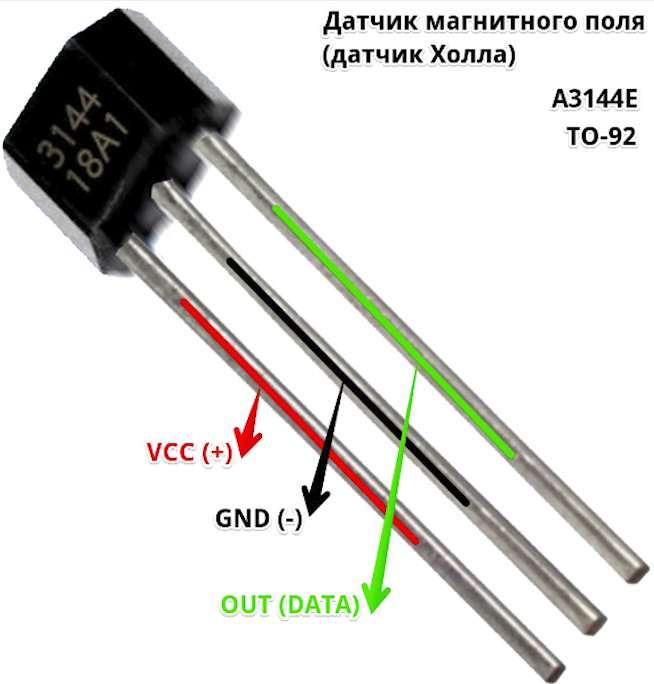
Вот он — красаучег)
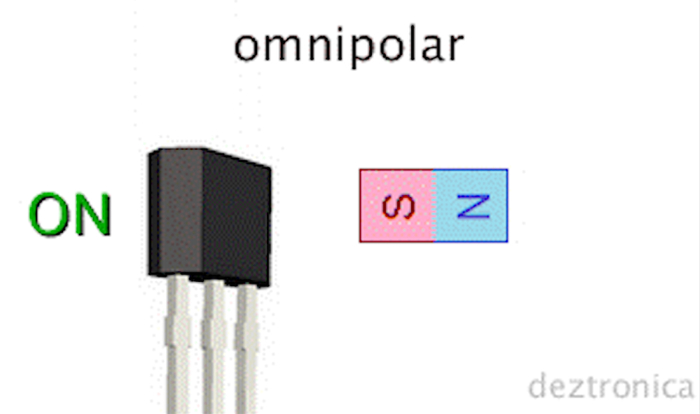
Связка (датчик-магнит)
А теперь вернемся к несквозным отверстиям в мультиячейке. Прошу заметить следующее: Сами отверстия располагаются на несущих ножках, которые находятся по центру камеры, но каждый со своим индивидуальным радиусом от центра. Тем самым мы можем расположить 6 датчиков холла рядом друг с другом. То есть каждый датчик реагирует на свой собственный магнит.
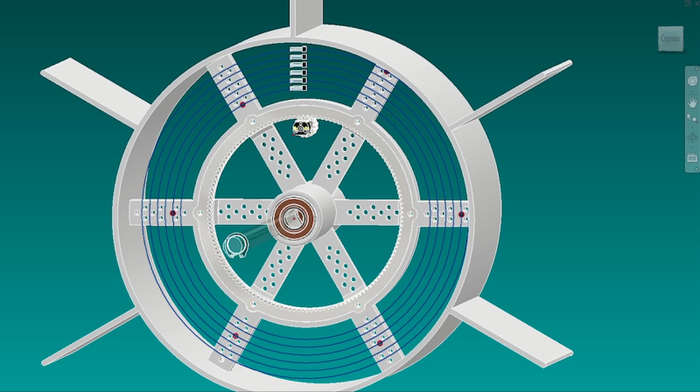
Все это добро закрывается корпусом, внутренним диаметром 452 мм, то есть на пару миллиметров больше, чем сама мультиячейка.

Материал сделан на основе канала «Сам себе инженер» видео того же содержания, только под атмосферу фонка и киберпанка:
Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Помочь автору ускорить разработку:
Более подробное обсуждение проекта: t.me/OMSK0443
Все это добро закрывается корпусом, внутренним диаметром 452 мм, то есть на пару миллиметров больше, чем сама мультиячейка.
Зазор между мультиячейкой и корпусом
Данный корпус имеет 2 отверстия, одно «входное» - верхнее, второе «выход» - нижнее и несущие элементы под датчики и моторы.
Приём-подача ингредиентов
Крепление под датчики
Крепление под мотор
А теперь давайте поговорим о клапанах. Сам выбор клапанов является довольно непростой задачей. Изначально думал делать что-то на пневматике, но как оказалось, сама система получалась достаточно громоздкой. То есть нужен как минимум компрессор, лубрикаторы, куча релюшек, шлангов, плюс всё это добро стоит достаточно дорого. К тому же большие габариты узлов пневматики, они больше рассчитаны на рабочее давление, которое нам в принципе и не нужно. К примеру, размеры цена пневмоприводов являются слишком высокими. Короче я остановился на зубчатой передаче.
Типичная пневматика

Слишком всё громоздко для управления клапаном
Поскольку сам корпус является круглым, то сама форма клапана должна быть тоже круглой, то есть сам клапан повторяет геометрию основного узла, но чуть большим диаметром на 8 мм. Данное решение позволило сэкономить пространство.

Клапан подачи ингредиентов
В качестве направляющих был выбран специальный паз под размер самого клапана.
Клапан двигается внутри паза корпуса
В данном клапане имеется два паза под магнит и посадочное место под рейку

Общий вид клапана

Посадочное место под рейку
Так как данный клапан имеет круглую форму, то наша шестерня или полурейка, повторяет геометрию самого клапана, поскольку по факту это коронная шестеренка, которая повторяет геометрию самого клапана, соответственно был вырезан тот ее участок, который нам необходим. Используя этот принцип мы смогли сэкономить достаточно много пространства. Также прошу заметить тот факт, что вся зубчатая передача именно косозубая, поскольку данный принцип увеличивает площадь зацепления.
Вырезал нужную часть из коронной шестерни и получил рейку под радиус клапана
Так же в корпусе между двумя отверстиями имеется небольшой выступ, как раз, предназначен для того, чтобы сама рейка не сильно проваливалась
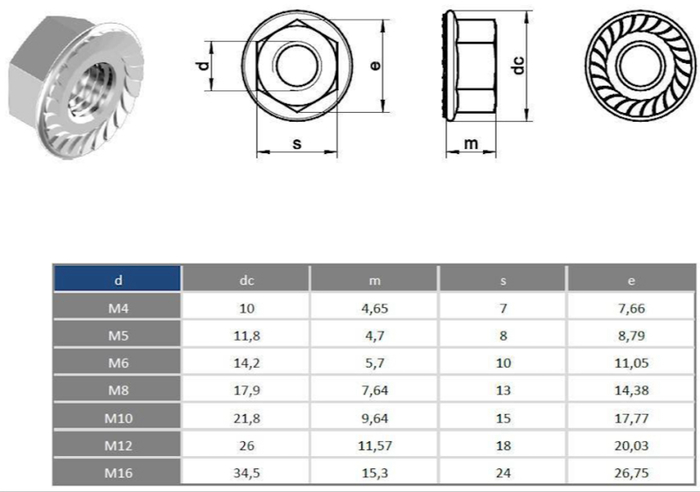
В качестве основных крепежных элементов во всех узлах наиболее оптимально это гайка с фланцем и шпилька размера М4, а в качестве межузлового крепления уже М6.
Аналогичным образом устроено оставшиеся два блока.
Общий вид блоков с переди
Вид с зади
Входные отверстия закрывает общая крышка, так как у меня оставались подшипники и кусок вала, то я их решил использовать в качестве ручки.
Общая крышка
Возможно это спорный вопрос, потому что эргономика как х*ёк у гномика, но я сделал расчет на то, что так будет удобнее. Поскольку сам блок хранения распределения имеет круглую форму и верхняя дверца повторяет ее геометрию, то человеку достаточно даже не хватать за эту ручку, а просто ее толкать, поскольку сама ручка вращается, а движение самой крышки происходит внутри паза. Сама идея, конечно, немного спорная, но достойная внимания.
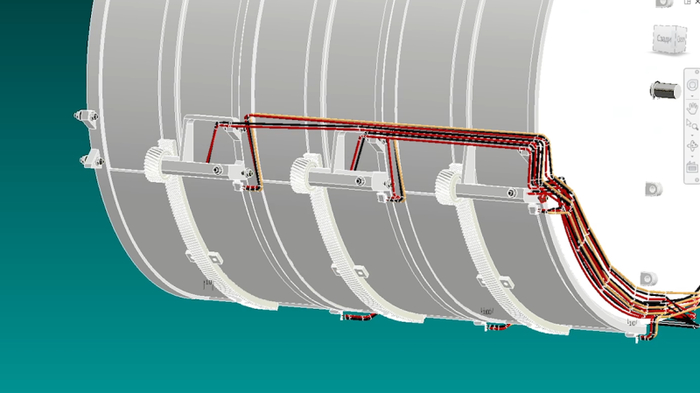
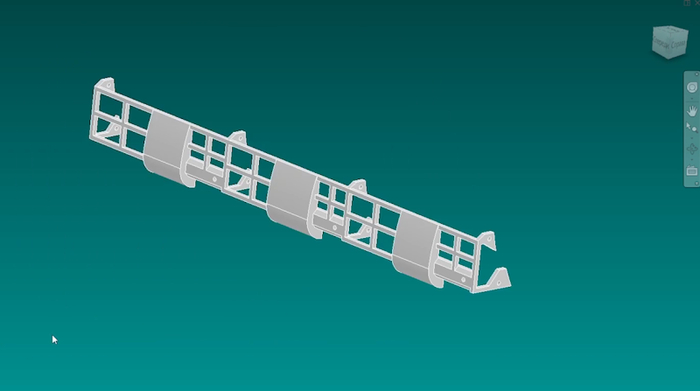
В качестве внешней защиты от зубчатого зацепления - была разработана общая перемычка на все три блока. Выглядит она следующим образом. Крепление стандартное, шпилька и две гайки с фланцем М4.
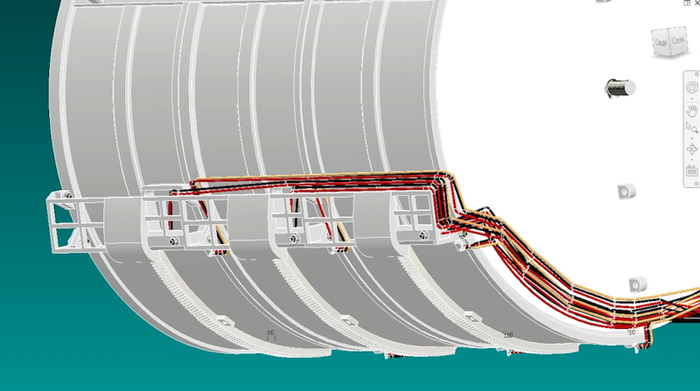
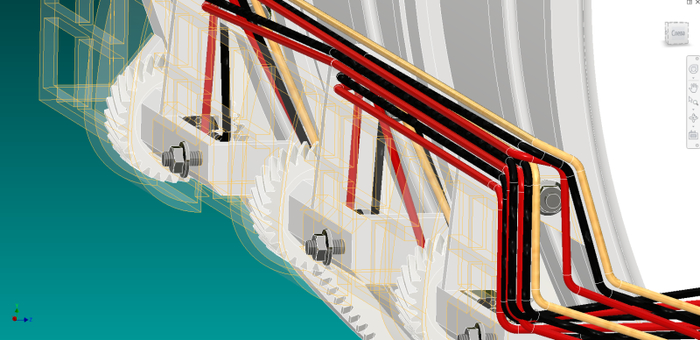
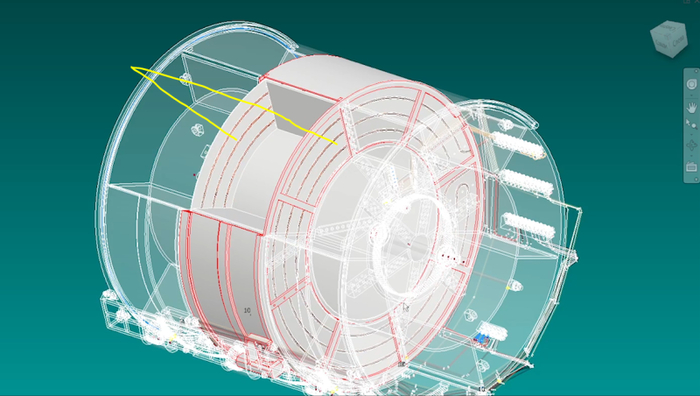
Между центральным и левым центральным и правым блоками находятся испарители. Эти элементы являются частью системы охлаждения, о которой мы будем разговаривать отдельно. Также отдельно поговорим о проводах и электрике. В следующем посте перейдем к самой сложной части — это блок механической обработки…
Материал сделан на основе канала «Сам себе инженер» видео того же содержания, только под атмосферу фонка и киберпанка:
Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Более подробное обсуждение проекта: t.me/OMSK0443
Всех приветствую. Начиная с 21 года, я занимался разработкой прототипа, которая позволила бы готовить пищу в автоматическом режиме: первое, второе, третье, и причем одновременно. Параллельно с этим, мы очень подробно будем разбирать такое явление, как изобретательство на практике данного механизма. Дело в том, что сама тема, она довольно плохо освещена, и на мой взгляд, в этой теме есть куча подводных камней, о которых мало кто знает.
Сама идея создания механизма зародилась в 21 году, когда я работал электромехаником на пищевом предприятии.

Примерно так оно выглядит
Почему я вообще считаю, что приготовление пищи можно автоматизировать и применить это в быту? Дело в том, что с одной стороны: с инженерной точки зрения - сам процесс приготовления пищи является набором повторяющихся механических действий (его можно представить как конвейерный процесс) С другой стороны: большая часть бытовой техники уже заточена на приготовление пищи, то есть готовые узлы для этого имеются. Осталось «всего лишь» большую часть из них собрать в один корпус и написать программу.

Всё это добро необходимо засунуть в единый корпус и "подружить" между собой.
Но не все так просто. Для полной автоматизации приготовления пищи, те узлы, которые есть, их нужно переделать, а некоторые нужно создавать с нуля, применяя при этом нестандартные технические решения. К тому же на каждое блюдо уже есть готовые рецепты, то есть по факту это набор инструкций для будущего механизма. То есть по факту есть уже все предпосылки для этого. Перед тем как рассказывать о проекте, я расскажу основные принципы изобретательства, которые лично я использовал.Поэтому мальчики, девочки, присаживайтесь поудобнее. Вас ждет цикл ох*ительных историй...
Перед тем, как приступить к разбору проекта, давайте поговорим о изобретательстве. Поскольку сам процесс является время затратным и энергозатратным, то один из основных ресурсов, которые требуются от человека, это энергия-время. Звучит, конечно, немного странно, но я сейчас всё подробно объясню. Под энергией я подразумеваю наличие у человека сил что-либо делать, а под временем это, собственно, наличие свободного времени.
Энергия-время-деньги
И весь прикол в том, что довольно редко бывает, когда одно совпадает с другим. То есть, к примеру, у тебя имеется силы что-либо делать, но ты не можешь делать то, что ты хочешь, потому что ты занят совершенно другим.
С другой стороны, у тебя и есть свободное время, но ты не способен что-либо делать. То есть, у тебя тупо нет желания, потому что у тебя сил ни на что нет. И вот совпадение этих двух условий, как энергия и время, есть обязательный атрибут в изобретательстве.
Как правило минимум одного ресурса постоянно не хватает
Следующий вопрос это вопрос работы с информацией. Дело в том, что человек не может знать абсолютно все, но для решения той или иной нестандартной задачи ему приходится работать с информацией - с которой он никогда до этого не сталкивался. И этот процесс происходит конвейером. Основным помощником в этом вопросе является метод Ричарда Фейнмана.
Один из создателей современной квантовой электродинамики — Отец нанотехнологий.
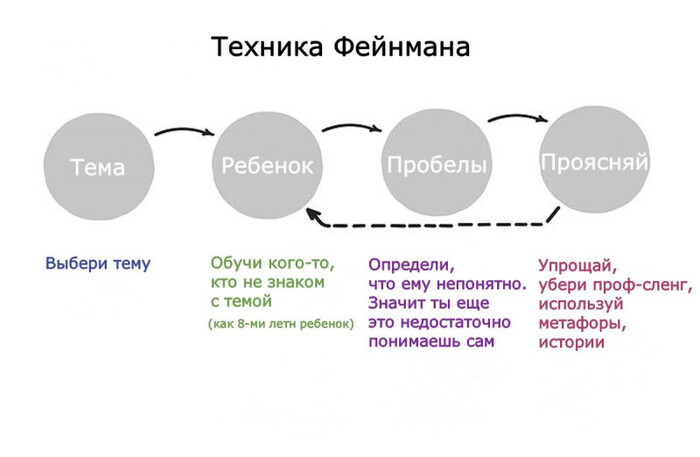
Метод освоения новой информации
Суть его метода заключается в следующем: любое сложное явление нужно объяснить так, как будто ты пытался бы это объяснить маленькому ребенку, но вместо ребенка - это ты сам. Но даже при простоте этого метода у человека могут возникнуть ряд трудностей с пониманием информации.
В данном процессе вы можете почувствовать себя тупым, потому что ничего не понимаете - но это не так. Дело в том что, когда ты изучаешь большой объём информации, которая тебе реально нужна, у тебя начинают «кипеть мозги», и ты можешь чувствовать себя тупым. Это нормально, потому что это говорит о активном процессе работы мозга, поскольку в нём формируются активно новые нейронные связи, а это довольно энергозатратный процесс.
И по этому вопросу к нам на помощь приходит другой русский сумрачный гений - Юрий Валентинович Кнорозов. Приведу его цитату. «То, что создано одним человеческим умом, не может не быть разгадано другим». Этот человек в одиночку расшифровал письменность Майя, тем самым подтвердив собственную цитату на практике. Поэтому берем ее на вооружение.
То, что создано одним человеческим умом, не может не быть разгадано другим
Следующие неочевидные приемы, которыми я лично использовал - это четыре закона Барри Коммонера. Барри Коммонер - это американский биолог и эколог, который вывел четыре закона именно в экологии.
Звучат они следующим образом:
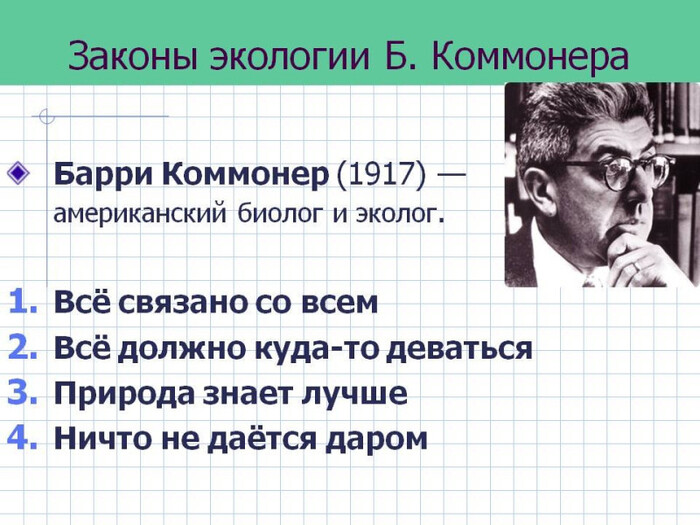
Лично я глубоко убежден в том, что эти четыре закона применимы не только к экологии, но и в развитии технических систем, да и вообще в жизни. Рассматривая окружающий мир как единую целую систему, все элементы которого внутри связаны между собой - это позволяет смотреть на мир более масштабно и одновременно с этим видеть ряд неочевидных нюансов. Все вышеперечисленные вопросы будут детально рассматриваться на практике данного механизма.
Конечно, это не все, что я хотел бы рассказать, но до остальных моментов мы дойдем уже потом. А теперь - давайте уже наконец приступим к разбору данного агрегата.
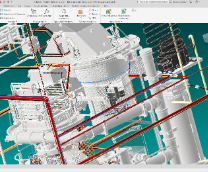
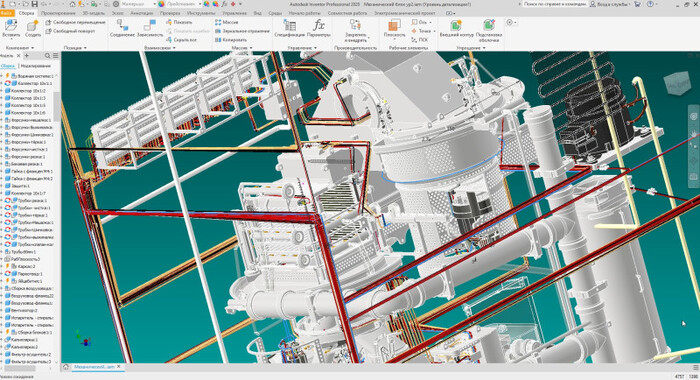
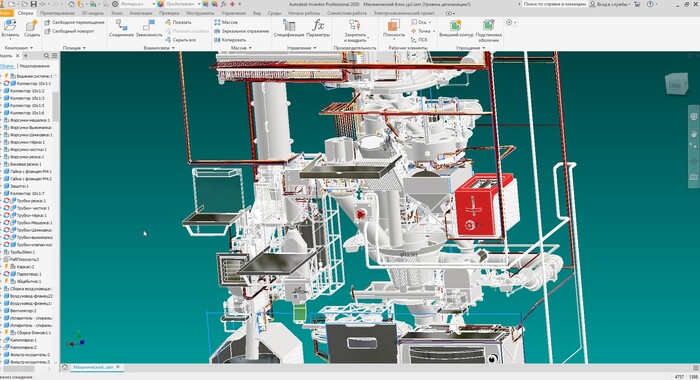
Во время разработки концепции данного агрегата я пришел к выводу, что без 3D моделирования делать дальше нечего, поскольку я раньше думал, что это является супер-сложным, но опыта у меня не было, пришлось с нуля во всем разбираться.
В процессе изучения данной темы я пришел к выводу, что сама сфера 3D моделирования условно делится на две части - это художественная часть и техническая. Понимание этого момента позволило мне сузить круг поиска для подходящей программы 3D моделирования.
Из всех программ я остановился на Autodesk Inventor. Она мне понравилась не только удобным интерфейсом, но и тем, что в этой программе уже заложена видео библиотека, по которой можно повторять действия и практиковаться.
Самая первая модель это была емкость. В режиме «свободного плавания» для того чтобы ее смоделировать у меня ушло примерно часов 8. Сейчас же я это делаю за 5 минут. В общем, было тяжело, но я справился.

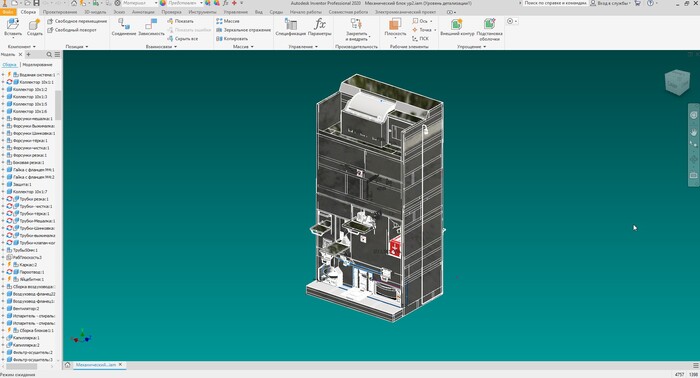
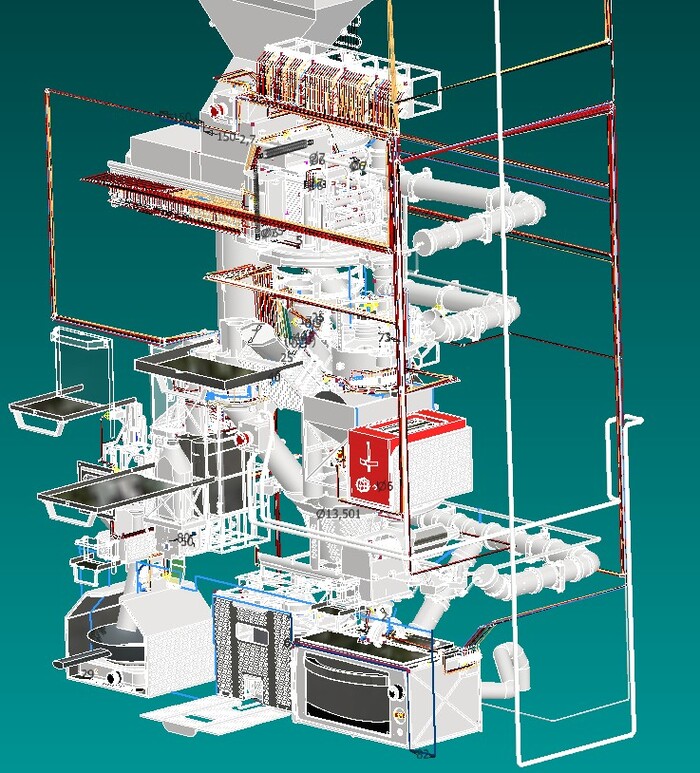
Выглядит это устройство следующим образом:

Прототип — версия 1
Ширина данного устройства 1200 мм, высота 2300 мм. Перед тем, как разбирать все технические нюансы, давайте поговорим об общей его концепции. Дело в том, что с механической точки зрения, сам процесс приготовление пищи можно условно разделить на три этапа:
1) Этап хранения-распределения,
2) Этап механической обработки,
3) Термическая обработка.
И весь прикол заключается в том, что перед тем как что-то готовить мы планируем, что мы будем готовить (выбираем рецепт), и из чего мы будем готовить (подбираем ингредиенты).
То есть это первое -это сам процесс планирования. То есть если мы возьмем из холодильника тупо все подряд там порежем, понах*евертим и будем думать что потом с этим делать, то, естественно - это будет дичь. Я уверен, что 90% блюд, которые потребляет человек, они именно по этому этапу и устроены, а понимание этого позволит нам автоматизировать данный процесс.

Когда что-то пошло не так...
Некоторые зададутся вопросом: а с чего робот может готовить пищу, если для этого нужны обоняние, вкус и прочие органы, которых у робота нету? Отвечу на это так: поработав не на одном пищевом предприятии, часть которых продают продукцию в ларьках, именно там борщи, второе, Салаты. Каждое блюдо имеет собственную технологическую карту. То есть те, кто работает на конвейере, никто эту пищу не пробует, поэтому в этом плане бояться не стоит и можете покупать.
Аналогично с рецептами - по сути, это та же самая технологическая карта, только для бытовых объемов.
Основной технический разбор делится на 4 этапа:
1. Блок хранения-распределения
Блок хранения-распределения
2. Блок механической обработки
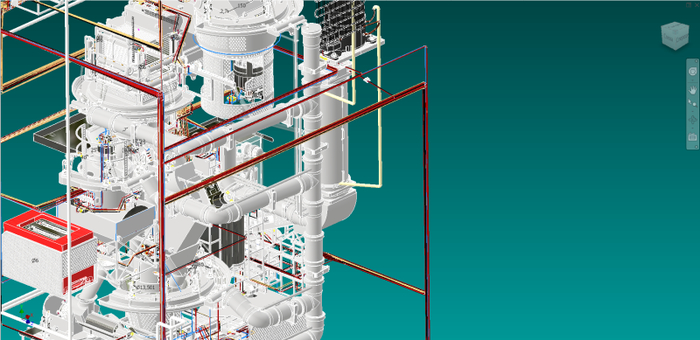
Блок механической обработки
3. Блок термической обработки
Термоблок
4. Сопутствующие системы, которые работают со всеми тремя блоками: (сантехника, электрика, схемотехника, система охлаждения, программное обеспечение и разработка корпуса под всё это добро).
Прочие системы
После этого я расскажу за свой опыт сборки данного агрегата, опытом взаимодействия с компаниями, которые производят бытовую технику и пищевое оборудование, тем самым ответив на вопрос, где робот и почему эти компании до сих пор его не сделали. В следующем посте - приступим к разбору первого блока - Блок хранения распределения.
Материал сделан на основе канала «Сам себе инженер» видео того же содержания, только под атмосферу фонка и киберпанка, немножко приправленные ненормативной лексикой:
Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Более подробное обсуждение проекта: t.me/OMSK0443
Здравствуйте! Начиная с 2021 года, я занимался созданием доступного устройства по автоматическому приготовлению пищи (первые, вторые, третьи блюда - одновременно), подробно рассказываю об изобретательстве на практике данного механизма - все технические данные буду выкладывать в свободный доступ, для его рассмотрения и доработки. Похожий станок будет у каждого дома, упрощая быт, готовя за него еду, и экономить его время...
Материал сделан на основе канала «Сам себе инженер» видео того же содержания, только под атмосферу фонка и киберпанка:
Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Более подробное обсуждение проекта: t.me/OMSK0443
