

2. Блок хранения-распределения ч1

Общий принцип работы блока хранения и распределения заключается в следующем: человек выбирает для себя нужный рецепт, далее механизм предлагает, какой продукт в какую ячейку положить или человек назначает эти ячейки сам, если у него собственный рецепт. Далее распределив все продукты по ячейкам, человек забивает таймер. К примеру, человек заложил продукты вечером, а нужно, чтобы приготовилось завтра ближе к вечеру, то есть тогда, когда он придет после работы. То есть заложил, включил, таймер пошел, человек пришел – готовая еда.
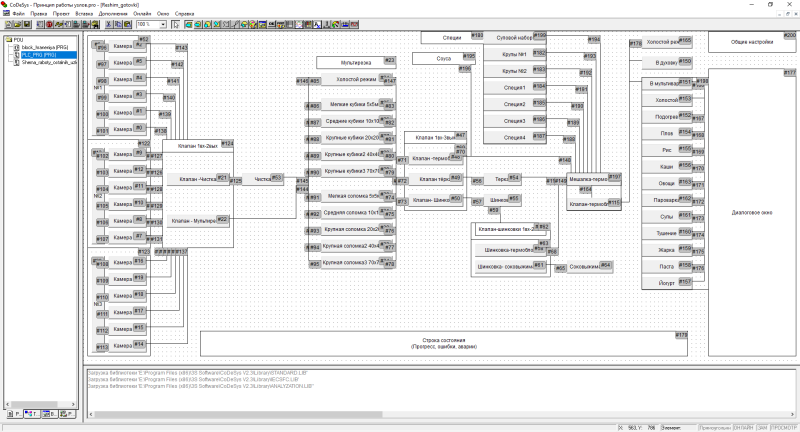
Прототип мнемосхемы — путь каждой ячейки в зависимости от механической операции
Все продукты делятся на три категории:
1) твердые (мясо, овощи)
2) жидкие (соуса)
3) сыпучие продукты (специи)
То есть - я их разделил на консистенции...
Данный блок - это блок твердых продуктов, под остальные продукты - имеются отдельные узлы, которые мы будем подробно разбирать позже, ну, а теперь приступим к подробному разбору всех деталей данного блока.
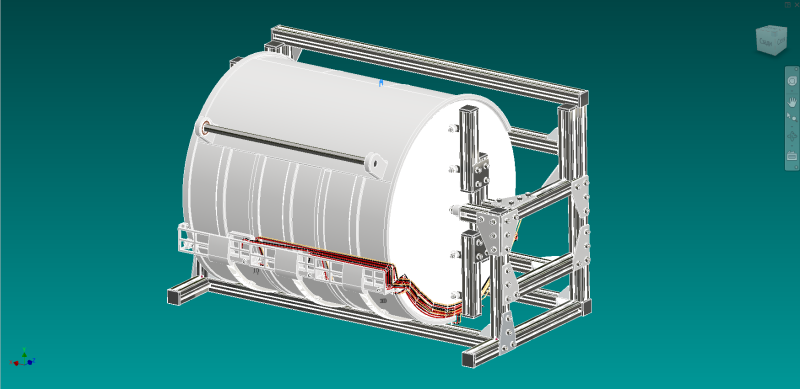
Общий вид
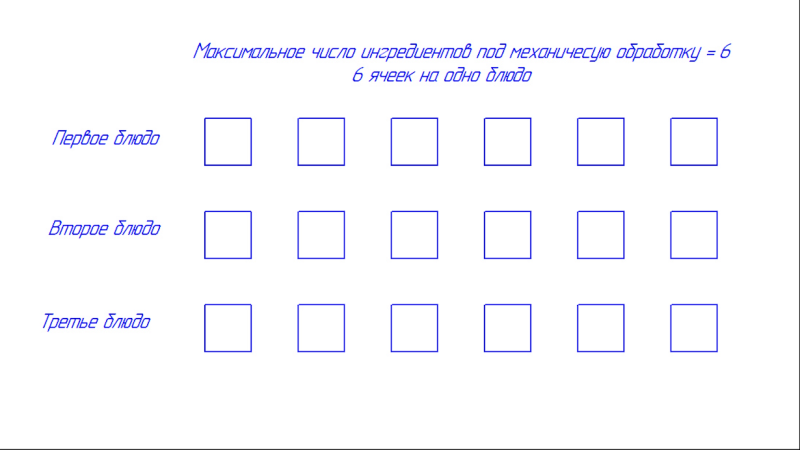
Начнем с ячеек и их размеров, перед тем как закладывать продукты необходимо выяснить, а какое вообще среднее количество ингредиентов приходится на один рецепт и какой размер этих ингредиентов?
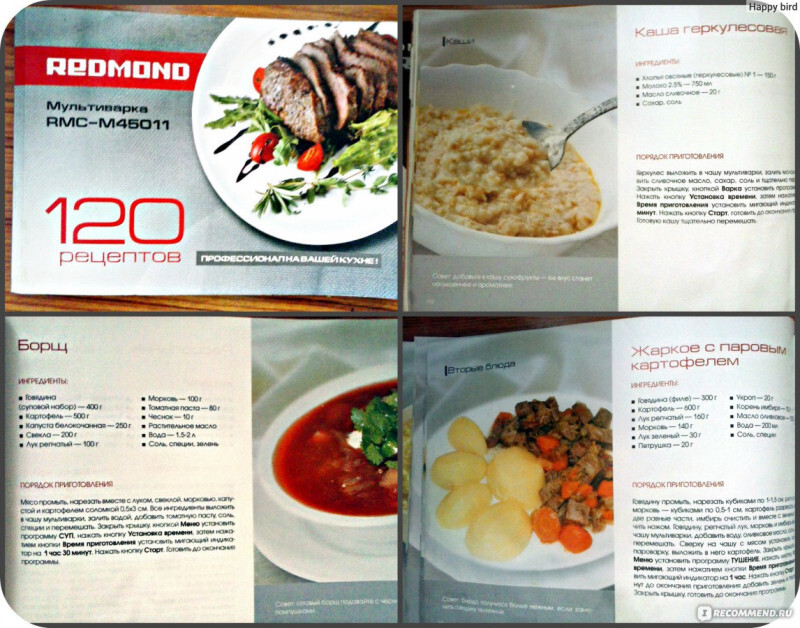
Было проведено два эксперимента. Первое я взял рецепты из книжки по мультиварки и посчитал максимальное количество ингредиентов на один рецепт, конкретно твёрдых продуктов под механическую обработку.
Второй практический эксперимент это был процесс готовки. Первый это борщ, второй это жареная картошка, третий это салат оливье. В процессе готовки я записывал на листе все ингредиенты, распределил их по категориям. Напротив каждого ингредиента писал тип механической операции, а также в какой контейнер он может залезть.
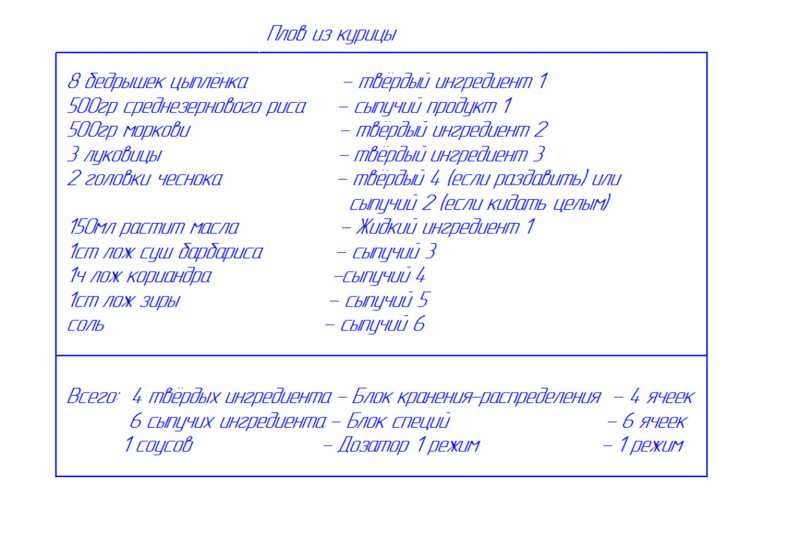
Напротив каждого ингредиента писал тип механической или термической операции
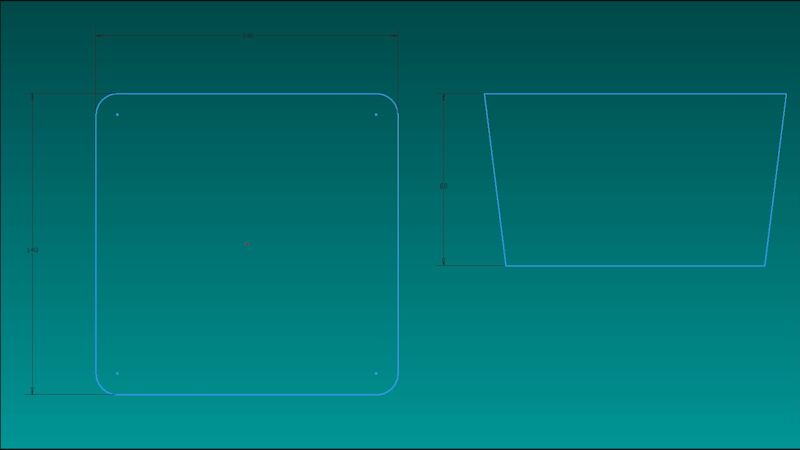
В качестве определения среднего размера ячейки под все ингредиенты я взял обычный набор контейнеров из фикс прайса.
Начал класть каждый ингредиент в контейнеры разного размера и выявил следующее среднее значение: Наиболее оптимальное значение ячейки является квадрат размерами 140 х 140 х 80 мм.
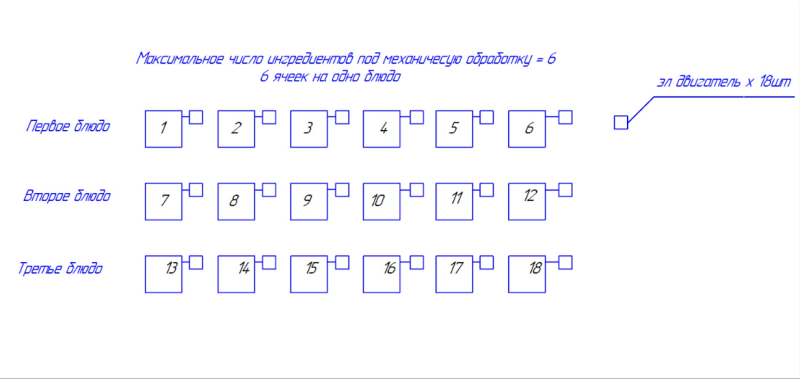
Поскольку максимальное количество ингредиентов в одном рецепте не превышает 6, то взяв это число в качестве максимального значения, я умножил это число на 3. То есть 6 ячеек на первое блюдо, 6 ячеек на второе и 6 на третье — в итоге 18 ячеек.
Основная сложность в разработке ячеек заключалась в сложности органов управления данными ячейками, поскольку каждая ячейка должна управляться отдельно.
Чтобы уменьшить количество органов управления и решить данную техническую задачу, я использовал закон симметрии. Смотрите в чем прикол: поскольку количество ячеек у нас является четным с одной стороны, с другой стороны они одинакового размера, это позволило мне пространственно расположить их таким образом, чтобы в пространстве они были симметричны друг к другу.
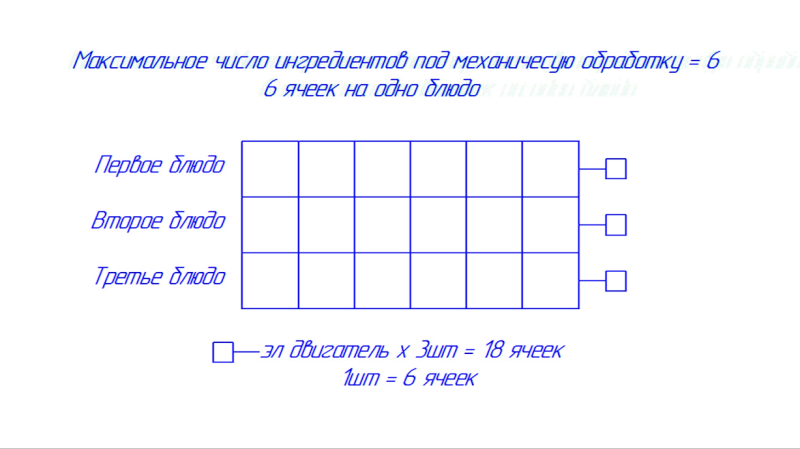
Один орган управления на 6 ячеек
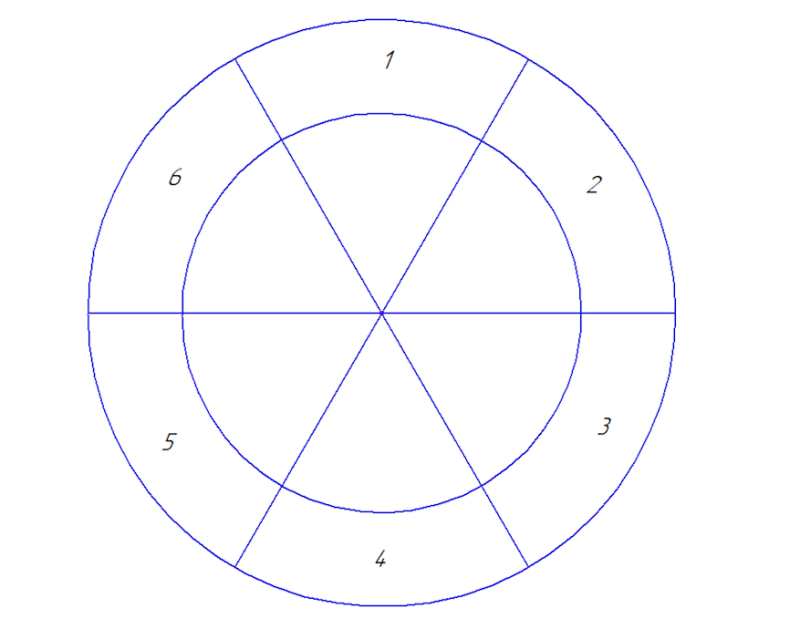
То есть, по сути, это обычная геометрия. Тем самым я смог уменьшить количество органов управления с 18 до 3. Один орган управления на 6 ячеек, первое, второе, третье. Все эти ячейки я назвал мульти-ячейкой и выглядит она следующим образом:

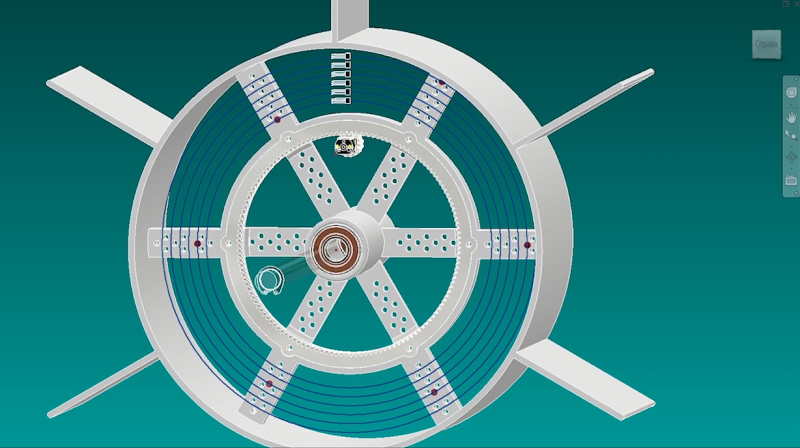
Мультиячейка
Прошу обратить внимание на то, что по центру каждой ячейки внутри располагается упор, тем самым неся основную механическую нагрузку на себя, которая в свою очередь передает всю нагрузку на центр.
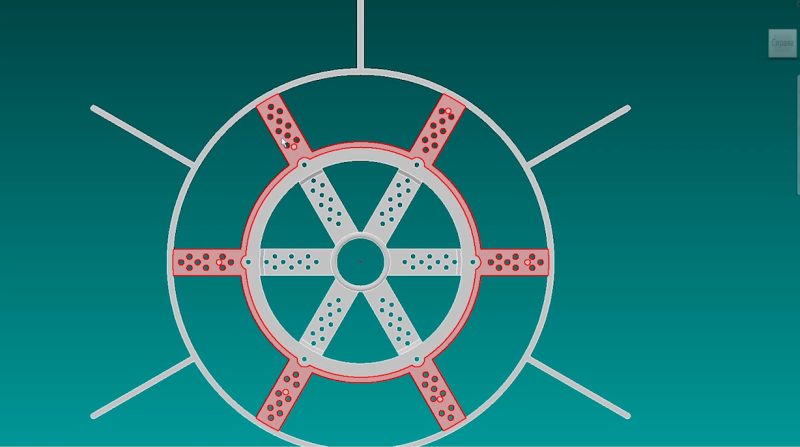
Упоры по центру ячейки
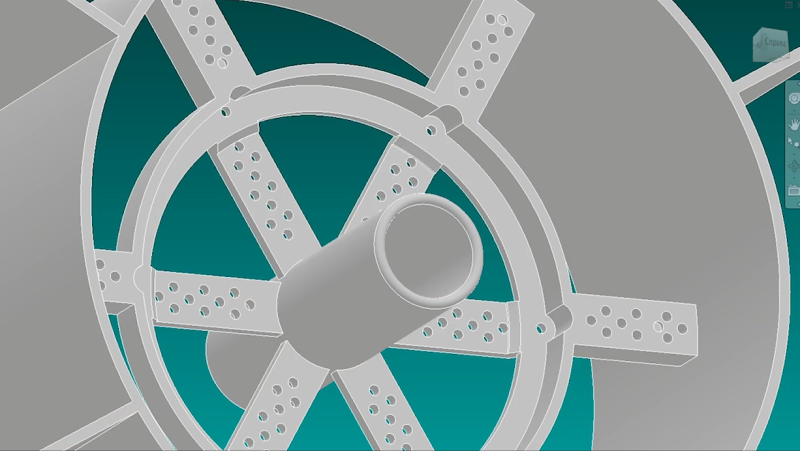
По центру этих упоров имеется специальный паз, он предназначен под зубчатую передачу.
Паз под коронную шестерню
Круглые отверстия в самих упорах несут себе функцию облегчения конструкции, но не все эти отверстия являются сквозными, но о них поговорим мы чуть попозже.
Для того чтобы вращать мультиячейки были использованы шестеренки с планетарным типом передачи, в которой есть две шестерни. Планетарная шестерня, она же малая неподвижная, и подвижная коронная шестерня.
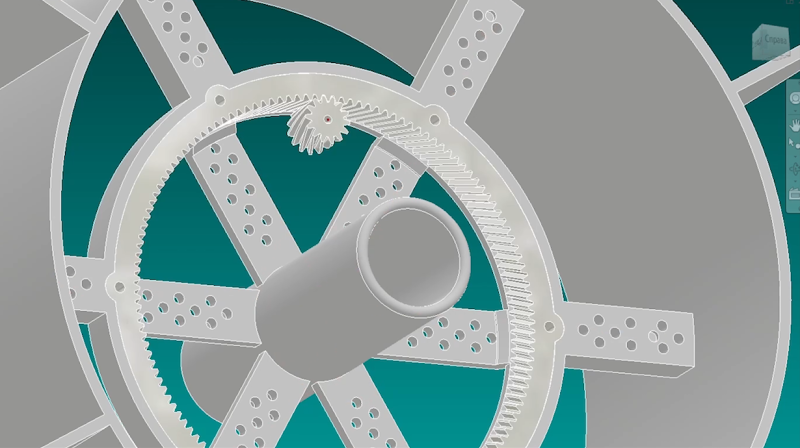
Планетарная передача
Основную нагрузку от мультиячеек несут себе подшипники типа 6202, если я не ошибаюсь, то данные подшипники применяются в стартерах автомобилей, продаются в автомагазинах. Был прикол, когда я пришел в автомагазин за подшипниками и мне надо было сразу купить их 6 штук. Тетя в ах*е на меня посмотрела, спросила зачем тебе столько подшипников. Ну говорю робота собираю, у нее Windows еще больше в ошибку вышел, ну, а я довольный наличием подшипников пошел дальше.

Подшипники 6-202
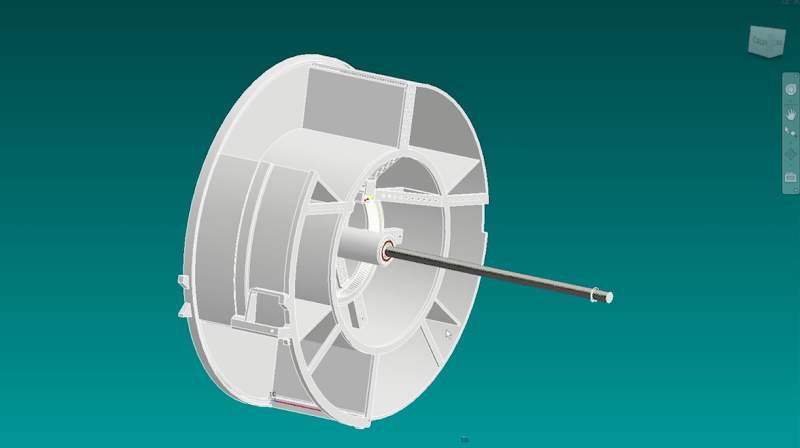
В качестве основного опорного элемента был выбран вал в соответствии с внутренним диаметром подшипника 15 мм. Впоследствии оказалось, что сам вал был некалиброванный, т.е. наружный диаметр был немного разный, вследствие чего подшипники на вал насаживались по-разному. Если один заходил даже от руки, то другой пришлось забивать молотком.
На расстоянии 24 мм, по краям от вала, был создан небольшой надрез под стопорные кольца с внутренним диаметром 15 мм. Они предназначены для дополнительной фиксации внешнего корпуса.
Все это добро вращает 6-ти вольтовый мотор-редуктор. Редуктор был выбран не случайно, с минимальными оборотами, для того, чтобы сэкономить на драйверах. То есть, подал питание, он вращает именно с такой скоростью, с которой нам нужно. Конечно, можно было бы поставить мотор и помощнее, но я сделал ставку на то, что основную нагрузку несут на себе подшипники. То есть, к примеру, как с дверью. Когда человек открывает дверь, он не чувствует её веса, а основную нагрузку на себе несут петли. В нашей же ситуации основную нагрузку несут подшипники. Конечно вопрос о мощности мотора остается открытым, но я решил рискнуть именно по этой причине.

6V мотор-редуктор (70-100 об.мин)
Для того, чтобы двигатель понимал, когда ему останавливаться, нужны датчики. Поскольку датчики являются по сути нервной системой всего агрегата, то их выбор это достаточно непростой вопрос.
датчики — их тысячи
Поскольку датчики присутствуют именно в связке «движущийся и недвижущийся» элемент, и форма узлов разная, то возник вопрос не только об их надежности, но и компактном размере. Сначала думал поставить механические концевики, но их минус в том, что во-первых, они механические, то есть присутствуют движущиеся элементы в самом датчике, плюс относительно большой размер и много проводов, которые от них отходят.
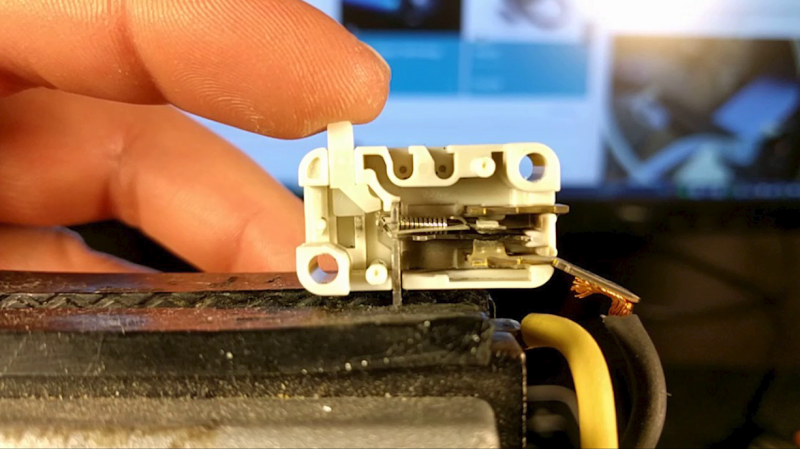
механический концевик в разрезе

Слишком много всего для одного мотора.
С герконами почти такая же проблема, из всех возможных вариантов я остановился на датчиках Холла. Это небольшое твердотельное устройство, которое реагирует на магнитное поле. Он имеет габариты 4×4 мм, от него отходят всего 3 провода плюс ни одной движущейся детали. Поскольку во всем агрегате этих датчиков у меня оказалось в районе 96 штук, то это оказалось очень удачным решением. Естественно этот датчик ставится на все НЕПОДВИЖНЫЕ части, а на все подвижные части ставится магнит. Неодимовый магнит диаметром 4 мм. Как раз под размер самого датчика.
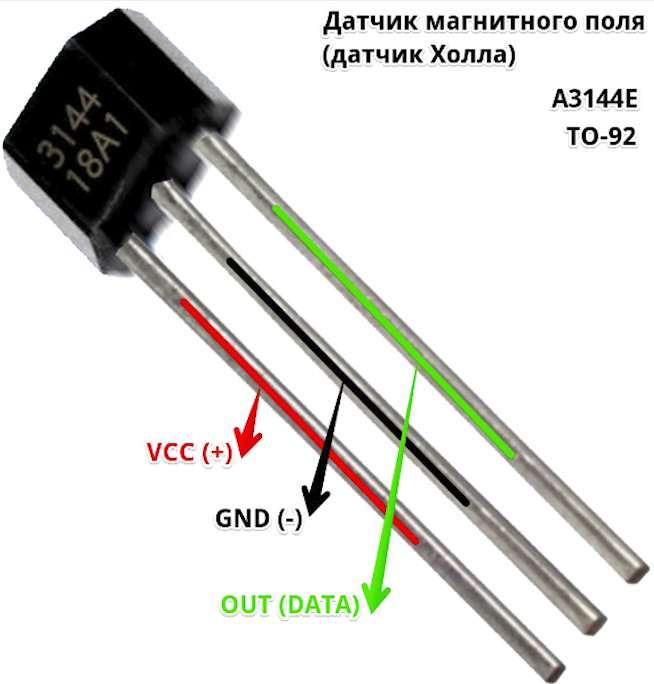
Вот он — красаучег)
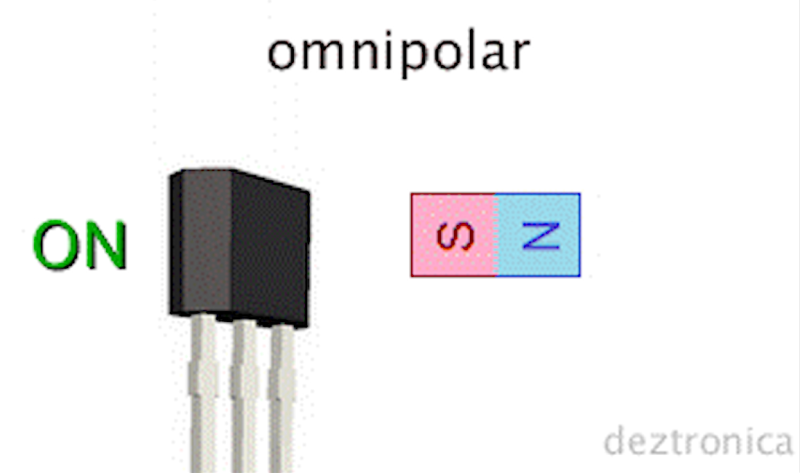
Связка (датчик-магнит)
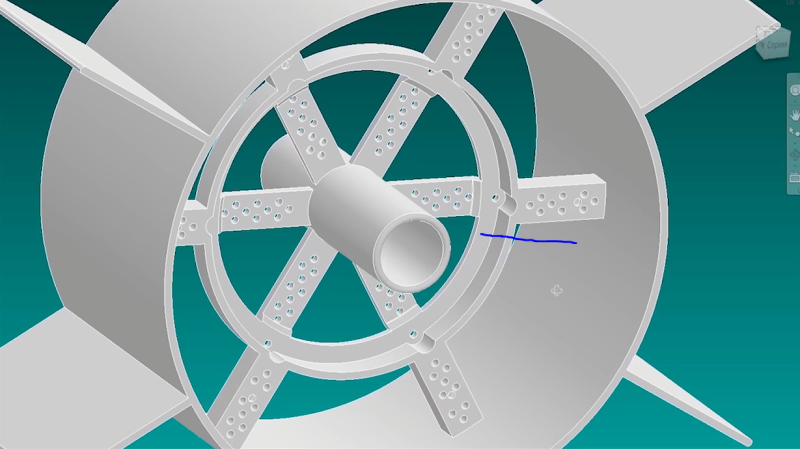
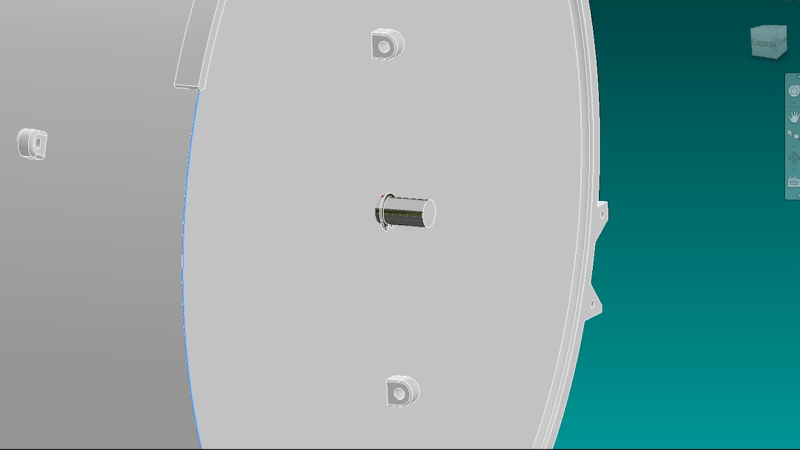
А теперь вернемся к несквозным отверстиям в мультиячейке. Прошу заметить следующее: Сами отверстия располагаются на несущих ножках, которые находятся по центру камеры, но каждый со своим индивидуальным радиусом от центра. Тем самым мы можем расположить 6 датчиков холла рядом друг с другом. То есть каждый датчик реагирует на свой собственный магнит.
Все это добро закрывается корпусом, внутренним диаметром 452 мм, то есть на пару миллиметров больше, чем сама мультиячейка.

Материал сделан на основе канала «Сам себе инженер» видео того же содержания, только под атмосферу фонка и киберпанка:
Духоскрепный ВК https://vkvideo.ru/@club230137063
Буржуйский YouTube https://www.youtube.com/@Самсебеинженер-с2л
Помочь автору ускорить разработку:
Более подробное обсуждение проекта: t.me/OMSK0443