
FPV фристайл. Полётный контроллер
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.Полётный контроллер - основной вычислительный центр квада. Имеет обычно на борту: микроконтроллер, акселерометр и гироскоп (разные вещи, без акселерометра можно летать акро) и, иногда, барометр; схему OSD (on screen display), несколько интерфейсов UART и I2C, USB разъём (сейчас Type-C потихоньку вытесняет microUSB), слот для microSD карты, светодиоды и кнопки.
Поехали подробно:
1. Микроконтроллер. Историю опустим, сейчас типичный полётник имеет контроллер фирмы STMicroelectronics семейства F4 или F7, всё остальное либо неактуально, либо несовместимо с прошивкой Betaflight, либо нетипично. Понятноe дело контроллеры различаются тактовой частотой, памятью и прочими фичами. Нам важно знать лишь то, что на процессорах F4 и F7 доступен полный функционал Betaflight. До кризиса микроэлектроники я не видел особой разницы в цене и покупал исключительно F7 полётники. Ну и для ясности картины о маркировке: в семейство F4 входят процессоры F405 и F411, в семейство F7 - F722, F745 и F765.
Скорей всего мощный процессор важен, если мы навесим GPS, гирлянду адресуемых светодиодов, настроим сложные фильтры и захотим летать по точкам; в нашем же деле процессор сгодится любой.
Прошивка на которой всё это работает называется Betaflight и слово "бета" вас не должно вводить в заблуждение - это очень стабильный, долго и уверенно развивающийся и хорошо тестирующийся open-source проект, ни разу я не натыкался на ошибки в прошивке. Прошит контроллер будет с завода, а вот версию желательно будет обновить на свежий релиз, но это в посте о Betaflight.
2. Акселерометр и гироскоп. Разницу, пожалуйста, загуглите, но нам, для чистого акро акселерометр не нужен, но стаб режим для подстраховки неплохо бы иметь. Гироскопов же может быть даже два; одно время два чипа соревновались друг с другом и в некоторые полётники их ставили оба - это тонкости, нам ни к чему. Барометр вычисляет высоту и нам он тоже не нужен, но если есть - переживём.
3. OSD (экранная информация). Через этот чип подключается камера к видеопередатчику. То есть картинка с камеры идёт на полётник, там к этой картинке OSD подрисовывает буквы и цифры (параметры которые нам важно видеть в очках: напряжение батареи, расход батареи, вплоть до авиагоризонта) и далее картинка с параметрами передаётся на видеопередатчик чтобы вещать нам в очки. Настроек море, в посте про Betaflight будут подробности.
4. Интерфейсы UART (и реже I2C). Они используются для общения полётного контроллера с другими внешними устройствами. У нас такими устройствами будут в первую очередь приёмник, с него приходят команды от пульта. Потом видеопередатчик, мы сможем с пульта менять настройки видеопередатчика: канал вещания (частоту) и мощность. И некоторые камеры также могут настраиваться по UART, обычно предлагают обширное меню настройки картинки и отображения доп. информации. Для нашего дела этих интерфейсов будет всегда достаточное количество на полётнике, считать и подбирать не придётся.
5. По USB разъёму у нас происходит подключение к компьютеру (или телефону) для настройки и перепрошивки Betaflight. Без этого мы не сможем настроить квад.
6. Слот для карты, если он есть, позволяет записывать в текстовый файл логи полёта с огромным количеством информации. Есть программы позволяющие на основе логов выдать распределение резонансных частот вашего квада по спектру. Есть софт для стабилизации видео, который в качестве источника стабилизации берёт данные гироскопа. Или просто, если хотите добавить к вашему видео картинку с положением стиков, есть плагины к видеоредактору, позволяющие это сделать, дай только логи. Если слота под microSD карту нет, это не значит, что логи не снять, на борту может быть чип памяти, а логи сливаются по USB.
7. Светодиоды состояния, и кнопка принудительного режима прошивки обычно используются мало, только при отладке проблем.
Основной же работой полётника будет: смотреть на данные с пульта (через приёмник), потом на данные с гироскопа, а в современном конфиге и на данные с моторов (через регуляторы) и, фильтруя наши дрожащие пальцы, порывы ветра, кривые пропы и вибрацию от открутившегося винта рамы, отправлять команды на моторы так, чтобы квад занял положение, которое мы имели ввиду. И это не преувеличение, фильтры современной прошивки эффективно могут распознавать и противостоять широкому диапазону шума во входных данных.
Дорогой полётник от дешёвого может отличаться:
1. Качеством комплектующих и пайки.
2. Комплектацией. Могут быть в комплекте шлейфы для ESC, USB кабель, провода. Практически в любой комплектации будут силиконовые виброгасящие вставки, без них квад летать будет очень плохо. Может быть в комплекте карточка с распиновкой, но в любом случае она будет в интернете.
3. Качеством маркировки. На хорошем контроллере может быть всё написано так, что за распиновкой лезть не придётся.
4. Качеством и удобством площадок для пайки. Маленькие площадки в несколько рядов тяжелее паять, чем крупные со сквозными отверстиями. И сорвать такую площадку сложнее.
Отдельно про форм-фактор.
Есть так называемые AIO (all-in-one, всё в одном) полётники и за свою историю развития значение этого "all" менялось: по началу в "all" помимо полётника входила PDB (power distibution board, плата распределения питания) и полётники выглядели так:
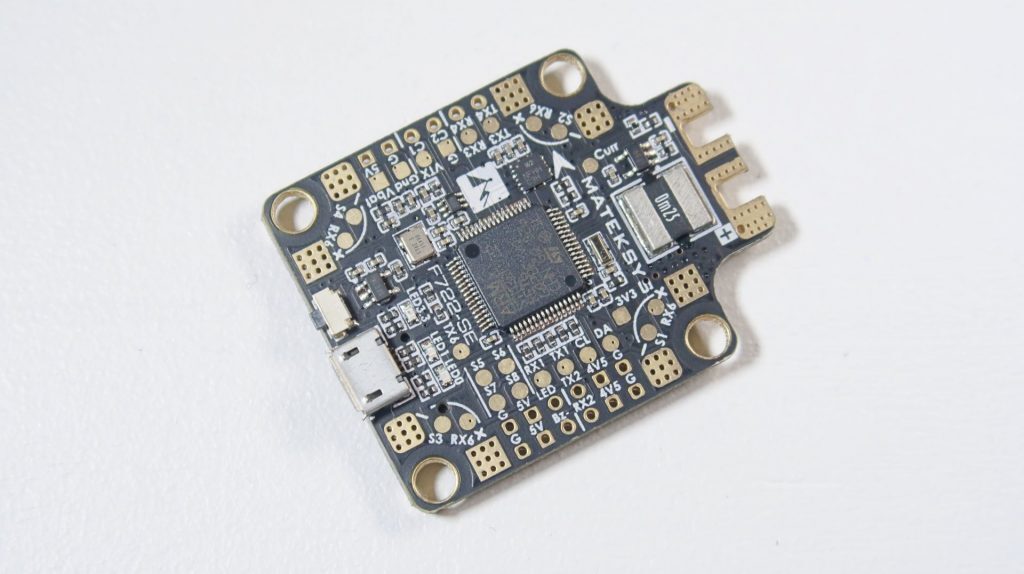
то есть имели на борту батарейный вход (две самые крупные металлические площадки с плюсом и минусом с краю) и удобные площадки для подключения питания отдельных регуляторов (вторые по размеру квадратные площадки у каждого углового отверстия).
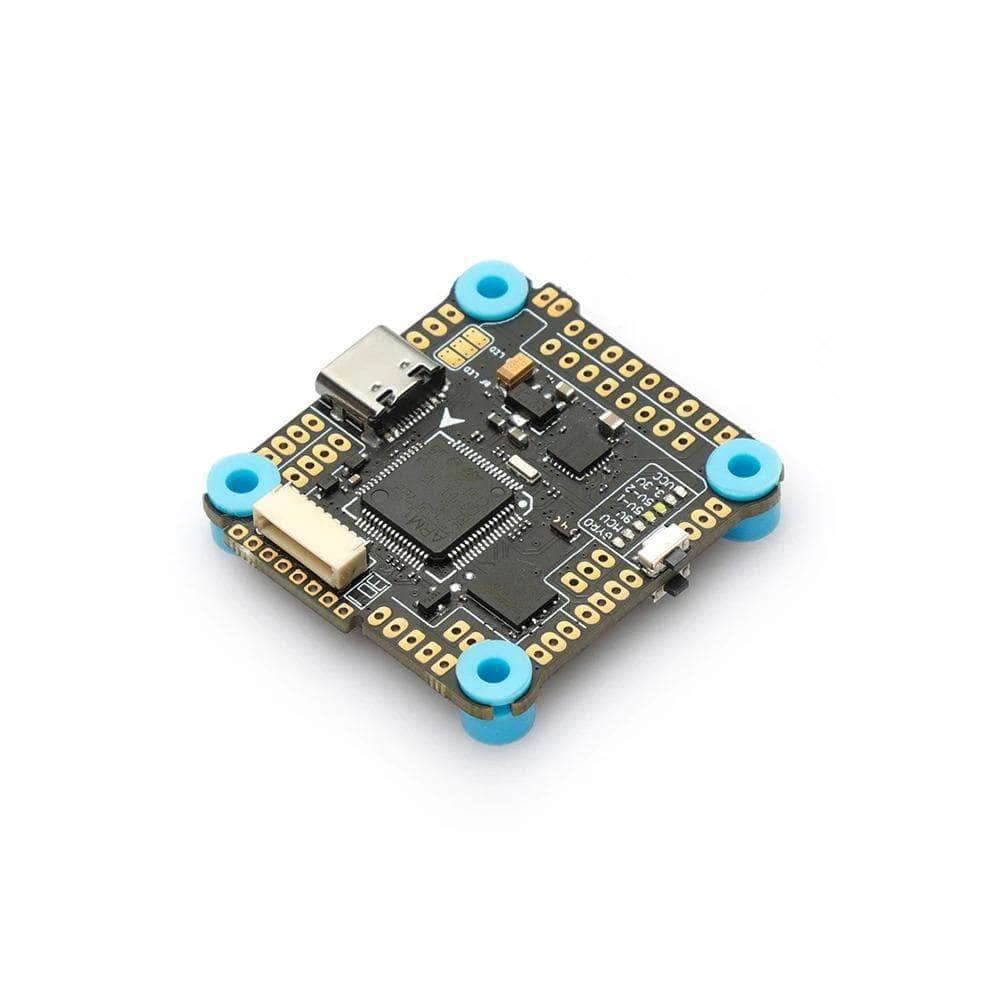
А потом миниатюризация позволила впихнуть на плату регулятор 4-в-1, и полётник стал выглядеть так:

То есть помимо входа для батареи, на плате есть сами регуляторы и 12 площадок для подключения моторов (на двух гранях, по шесть с каждой стороны). С такой платой весь ваш стэк - это одна плата. Минусы такого решения: менять всё, если что-то одно сгорело, температурный баланс часто не самый лучший и выход из строя из-за перегрева более вероятен, ну и как видно, при монтажных отверстиях 30x30, сама плата далеко выходит за эти пределы и это может стать неприятным сюрпризом на некоторых рамах, плюс компоновка идёт по бороде, если по бокам у нас моторы, то USB разъём гарантировано похоронен внутри рамы без удобного доступа. Короче, у нас батарейные площадки будут на регуляторе 4-в-1, соответственно на полётнике их быть не должно.
Дешёвыми были полётники JHEMCU, но толи всё подорожало, толи они в "премиум" подались. Фирмы Matek, Holybro, Betaflight, Diatone с серией Mamba, IFlight и Foxeer делают годные полётники. Легко спутать контроллер предназначенный для крыльев и самолётов, но его обычно отличает гребёнка из стандартных пинов для сервоприводов на контроллере или в комплекте; или слово wing в названии.
Сочетание полётного контроллера и регулятора 4-в-1 называют стэк (stack, стопка). Точнее всё, что уместилось в одну стопку можно назвать стэком, но продают под этим названием обычно полётник+регулятор. Выглядит так:
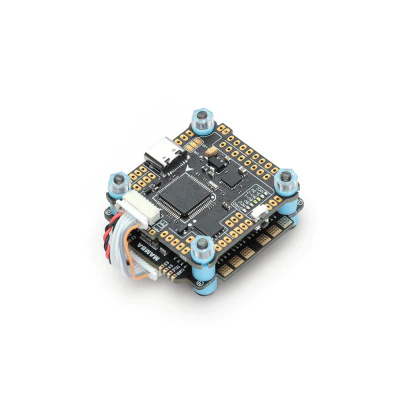
Плюсы такого выбора - во-первых: в комплекте винты, гайки и проставки чтобы всё это вставало с нужным зазором при минимальной высоте, во-вторых: стопроцентно работающий шлейф между полётником и регулятором в комплекте. Почему это проблема? Да потому что никакого стандарта распиновки разъёма регулятора нет, и количество и порядок контактов может не совпадать у шлейфа из комплекта регулятора и ответного разъёма на полётнике (шлейф хорошо виден на картинке). Однако на всех полётниках и на некоторых регуляторах есть отдельные площадки для пайки проводов из шлейфа, так что в любом случае регулятор и полётник можно "поженить". Обычно составляющие конкретной модели стэка есть в продаже по отдельности.
Следующая серия - камера.