
Red Army Airsoft - страйкбол
139 постов
•
856 подписчиков
0 просмотренных постов скрыто


Использование мотошлема в страйкболе

Привет. Страйкболисты, помогите пожалуйста! Я выбирал шлем для друга страйкболиста и наткнулся в АлиЭкспресс на мотошлемы. Конкретно у этого ⬆️ шлема есть забрало, маска и поднимающиеся очки. Выглядит классно, но у меня вопрос: Пользовался ли кто-нибудь таким шлемом в страйкболе? По характеристикам с Али⬇️ он подходит, но всё-таки не хочется отдавать 5000 за кота в мешке. Если кто-то ответит или что-то посоветует буду благодарен.
P.s Прикладываю ссылку с АлиЭкспресс, вдруг кому-то поможет:
https://sl.aliexpress.ru/p?key=WIbZrFg
Показать полностью
4

Шлем для страикбол

Показать полностью
1
Нужна помощь страйкболистов. Без рейтинга
Купил страйкбольный привод E&L АКС-74 и сразу задался вопросом по акумам.
Задача: увеличить емкость акума без потери в скорострельности, ресурсе двигателя и гербокса.
Решение: заменить li-po ячейки на li-ion 18650.
1 ячейка выдает 3.7в (3.7х3 11.1в)
Токоотдача 30 А в пике
Емкость 2200 махов
Вопрос: чем такая модернизация черевата и какие есть подводные камни??? Кто сталкивался или пробовал?
Без рейтинга!
Установка ВВД системы Proteus 3E в страйкбольный привод
Решил поделиться опытом установки ВВД системы Proteus 3E в бодик привода G&G Warthog 12. Система будет крепиться к камере хоп ап retro arms uni гайкой, что обеспечит хорошую соосность.
Сразу небольшой отзыв по гайке, гайка понравилась на камере хопа фиксируется с уверенным щелчком и достаточно туго, в дальнейшем это уберет горизонтальный люфт камеры внутри аппера.
Так как для установки системы нужно пилить стенки гирбокса, то решил сразу сделать безгирбоксовую сборку, которая позволит обслуживать систему без полного разбора привода.
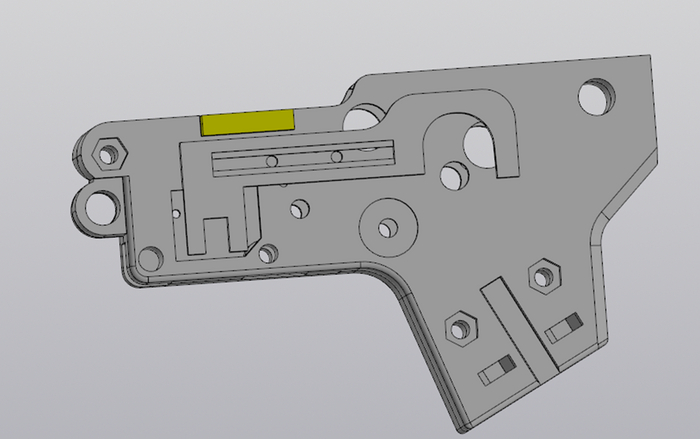
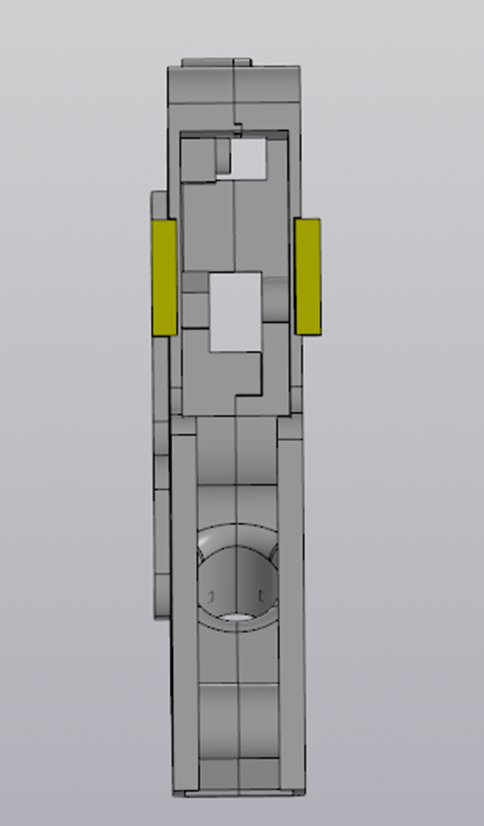
Была создана и напечатана модель для ловера, перед чистовой печатью напечатана порядка 7 разных вариантов моделей и в конце я решил остановиться на таком варианте, описанном ниже.
Крепление селектора сделано двумя винтами М2Х3мм. Крепление нижней части гира сделал винтами М18Х3, на противоположной стороне поставил гайки М3.
Так как у системы Proteus 3E крепление платы осуществлено под системой, то чтобы не повредить плату был сделан вырез до втулки секторной шестерни. Так же обрезал заднюю часть низа гира для удобной протяжки линии ВВД через антабку. Добавил вырез под двойной переключатель, по аналогии с базовым гирбоксом G&G и добавлены две направляющие для центровки низа гира в ловере, чтобы магниты попадали ровно на датчики.
Получившаяся модель показана ниже.
После печати получил такую модель, на фото модель с распечатанным тригербордом. Распечатал для фото, так как ловер на момент написания статьи был уже собран.

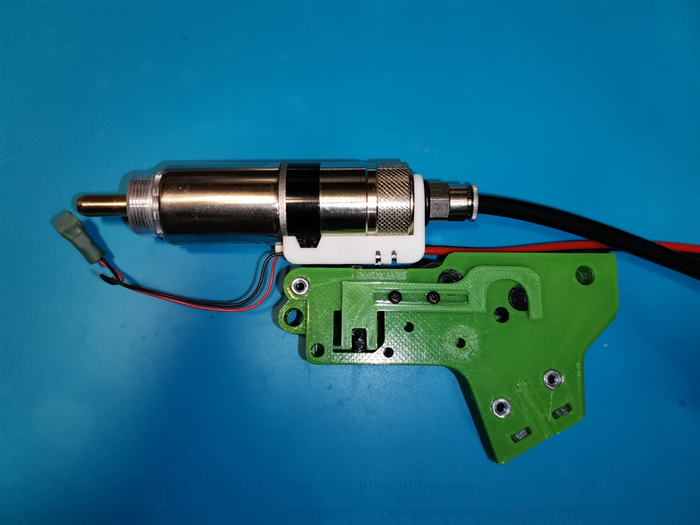
Ну и фото собранного ловера.


Сборка ловера на этом моменте закончена, остается придумать модель для крепления сосиски в аппере, так чтобы датчики на плате были параллельны магнитам в ловере.
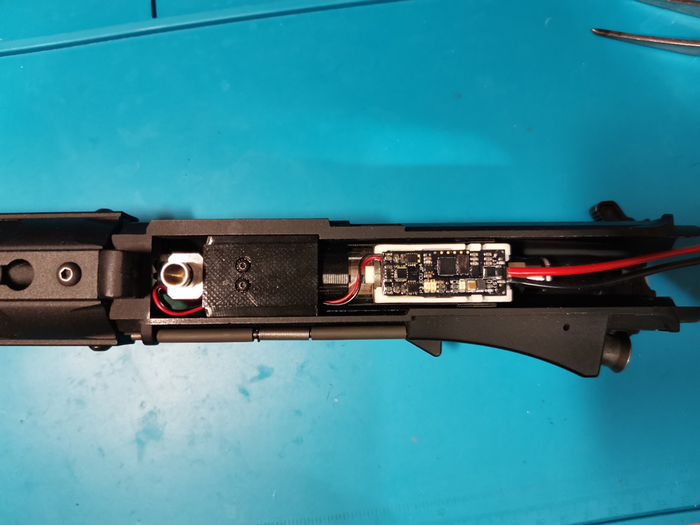
Для крепления системы решил сделать корпус в виде цилиндра с направляющими, направляющие предотвратят поворот системы внутри аппера.
Добавил крышку с пином (квадратное отверстие) которая крепится к корпусу сосиски. Крышка нужна для фиксации системы в аппере, с стороны хоп апа сосиска зажата орингами напечатанными из tpu пластика, с другой стороны систему держит крышку. По мимо пина добавил два винта М2Х4мм для большей надежности. В крышке добавлен вырез под провода подсветки хоп апа, подсветку пока не ставил.

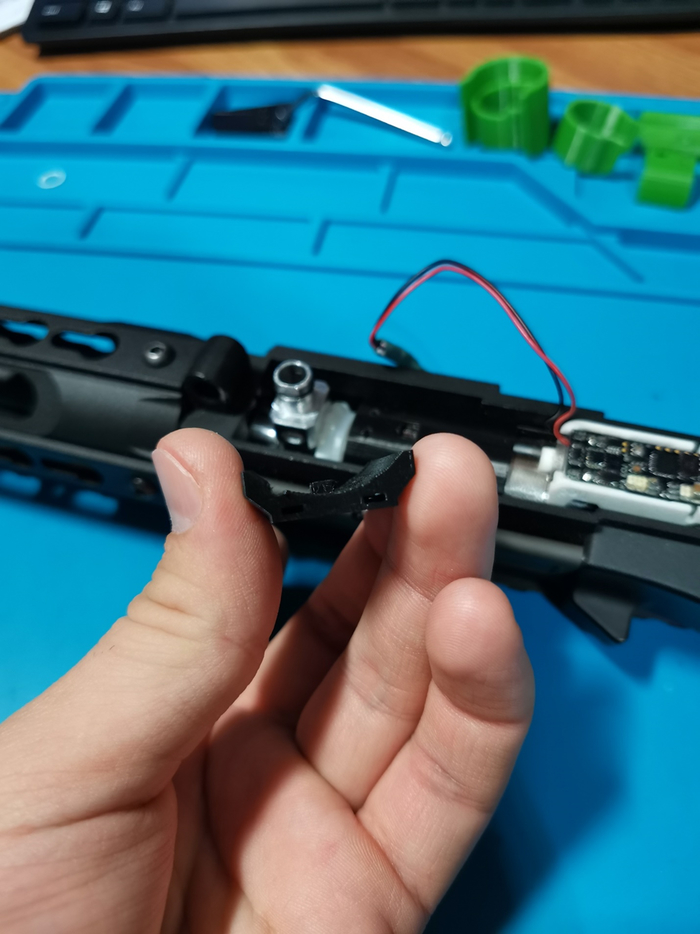

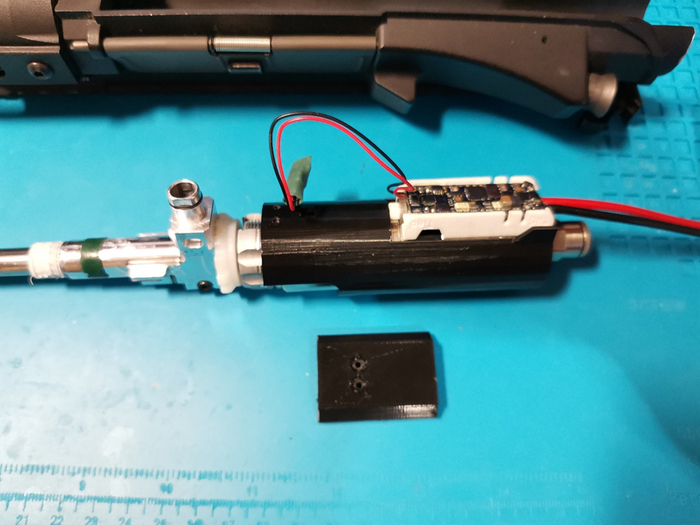
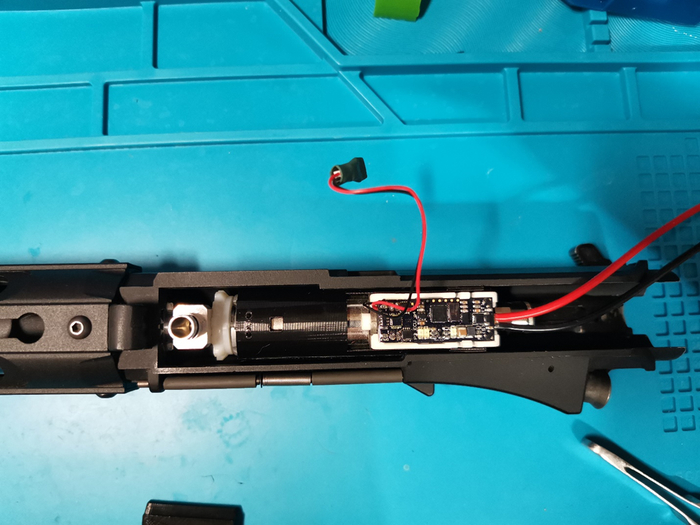

Фото собранного аппера ниже. Крышка упирается ребром в аппер G&G, получилась монолитная конструкция не позволяющая сосиске путешествовать внутри аппера.
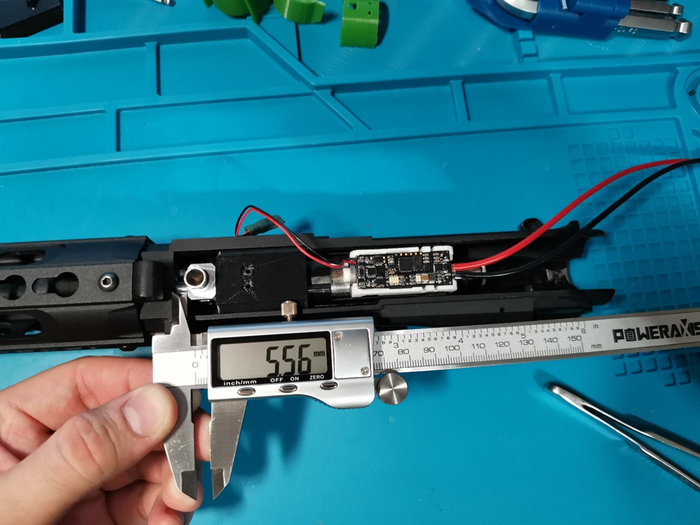
От камеры хоп апа retro arms uni до корпуса получилось около 5,56 мм. Расстояние может варьироваться +-1 мм, в моей сборке на таком расстояние получилось реализовать уверенную подачу из механ и соосность датчиков.

Ну и фото собранного привода, вывод ВВД системы закрыл в оплетку из полиэстера и с двух сторон закрыл термоусадкой. Оплетку можно приобрести в чип и дип.

Показать полностью
16

Устройство страйкбольного привода
Посредством использования малой доли магии, волшебства, мы поведаем вам об основах страйкбола - устройстве страйкбольного привода. Коснёмся темы механизма его работы и тюнинга.

Перезарядка м4 CQB в падении
Автор:
▷ Мой VK - https://vk.com/vol.mol4anov
▷ Мой YouTube - https://www.youtube.com/channel/UC6GV...
▷ Мой канал Дзен - https://zen.yandex.ru/profile/editor/...
▷ Мой канал Пикабу - https://pikabu.ru/@MasteRKeyT
▷ Мой канал Reddit - https://www.reddit.com/user/MaSteR_KeyT
▷ Мой канал TikTok - https://www.tiktok.com/@master_keyt?l=...
▷ Сообщество VK - https://vk.com/maaster_keyt
=========================================
Music: Neffix - Flirt
=========================================
🔫 Оружие в видео: M4 CQB
=========================================
ОПИСАНИЕ ВИДЕО:
Перезарядка м4 после падения, заживая винтовку в ногах
Показать полностью