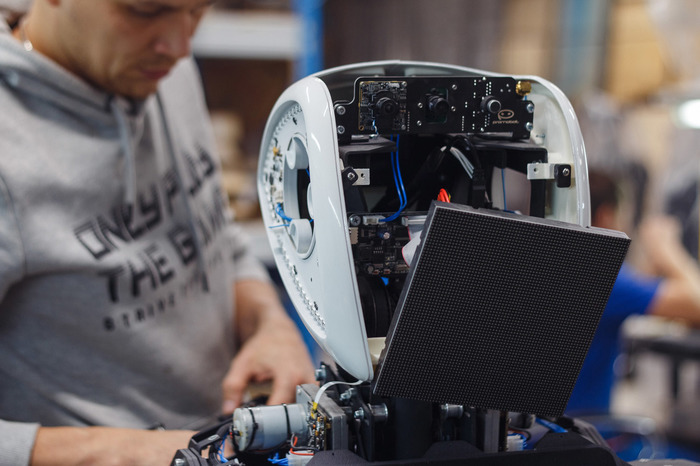
Компания Promobot — это молодая компания из Перми, это стартап с продуктом, признанным во всем мире. Сейчас это крупнейший производитель автономных сервисных роботов на территории Северной и Восточной Европы. В посте краткая история разработки и достижения успеха. Под катом много уникальных фото с производства. Производство компании занимает две тысячи квадратных метров в г.Перми, на базе технопарка «Морион». Производственный цикл включает в себя производство электроники, пластиковых и металлических деталей. На базе предприятия осуществляется разработка программного обеспечения, сборочные операции, тестирование основных систем, пусконаладочные работы и техническая поддержка.
На вопросы отвечает Игорь Еремеев, технический директор Промобот.
Ваша компания уникальна для России. Вы не останавливаетесь на достигнутом и постоянно развиваетесь. Можете ли сейчас вспомнить как все начиналось?
Компания Промобот была основана в 2015 году Алексеем Южаковым, мной, Олегом Кивокурцевым и Максимом Утевым. Мы представляли робота-снегоуборщика на конкурсе инновационных проектов «Большая разведка» в 2014 году. Там Алексей Южаков выступал в качестве спикера.
После выступления, Олег познакомился с Алексеем, рассказал о том, что мы занимаемся различными проектами в области робототехники и предложил внедрить результаты в проекты Алексея. Южакову идея понравилась и он предложил встретиться для обсуждения перспектив.
Далее, именно Южаков предложил сделать робота-промоутера. Он предложил нам помещение и финансирование. Мы же должны были построить первый прототип.
Построили. Повезли тестировать в один из торговых центров, и там он привлек очень много внимания. И так решили продолжать.
Что Вас мотивировало?
Все начиналось как хобби. Точнее, все началось с учебы, потом перешло в хобби, и потом появилась финансовая составляющая.
Оглядываясь назад, все ли Вы сделали правильно? Какие грабли собрали по дороге?
В случае с Промобот мы сделали все правильно. До этого мы делали робота-снегоуборщика, и он был не востребован. Несколько мы продали и получили не самую хорошую обратную связь. Он был недостаточно удобен, недостаточно технологичен. Поэтому она не ушла в массы. Мы вовремя переключились на Промобот.
Тогда как раз мы познакомились с Алексеем Южаковым. Он стал идейным вдохновителем. До этого были технари — я и Максим Утев, был Олег Кивокурцев, который умел продавать.
И еще одна деталь, я всегда работал с друзьями или с родственниками. Это были мои грабли. Но когда я связался с Олегом и Максимом, я начал работать с абсолютно незнакомыми мне людьми. У нас не было к друг другу претензий, обстоятельств, обязательств. Мы просто начали делать то, что было нужно.
С какими сложностями вы столкнулись и как их преодолели?
Финансирование. Когда мы делали снегоуборщика, то мы делали его за свои средства. Тогда у меня был свой бизнес и я мог себе это позволить. Но, наверное, ребятам, которые только закончили университет, самостоятельно заняться коммерческой робототехникой будет сложно.
Упорство. Промобот отличается от других команд, где я работал, именно этим качеством. Здесь непозволительно откладывать на завтра то, что можно сделать сегодня. Нужно брать и делать. Мы сидим здесь постоянно и работаем на результат. Любыми путями. Чем раньше результат, тем лучше. Любой результат.
Сейчас Вы больше стартап или технологическая компания?
Здесь очень тонкая грань. Мне кажется, что внутри офиса мы все еще остаемся стартапом — в плане управления, структуры, людей, мобильности. Вне офиса, наверное, мы уже комания. Однако никому не нужно стремиться переставать быть стартапом.
Игорь, делаете ли Вы что-то руками? Приходиться ли моделировать, кодить или браться за дрель?
Мне очень много чего приходится делать своими руками. Час назад я мог быть системным администратором и разбираться с серверами, через полчаса я программист и пробую новый код для общих нужд, а еще через два я уже строю стол в переговорку и занимаюсь обустройством офиса. Поэтому да.
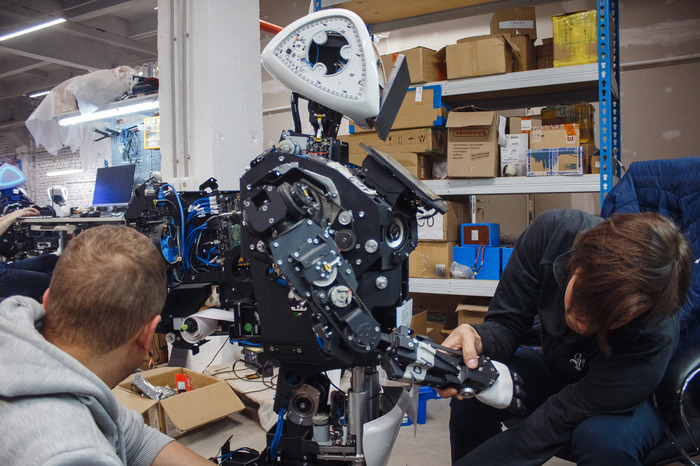
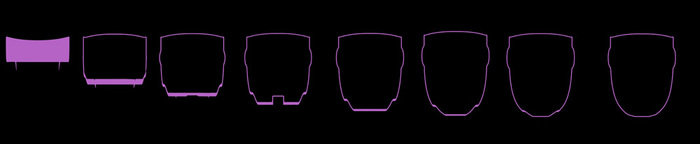
Как работает Ваш робот? Какие аппаратные компоненты Вы используете?
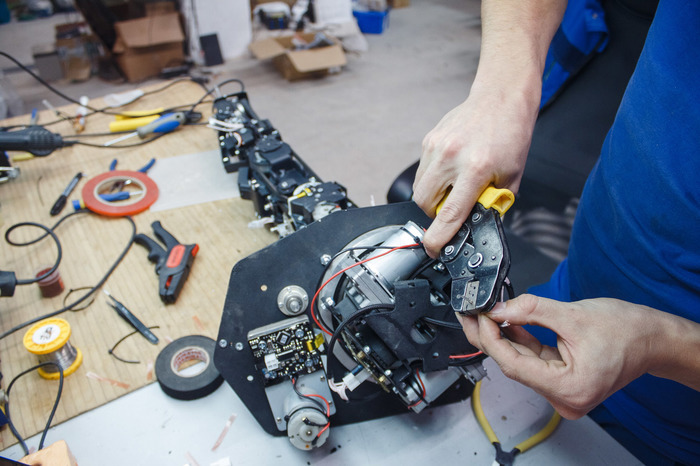
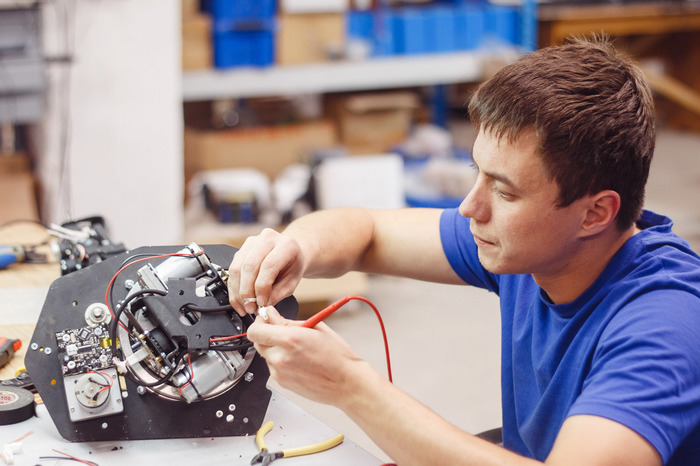
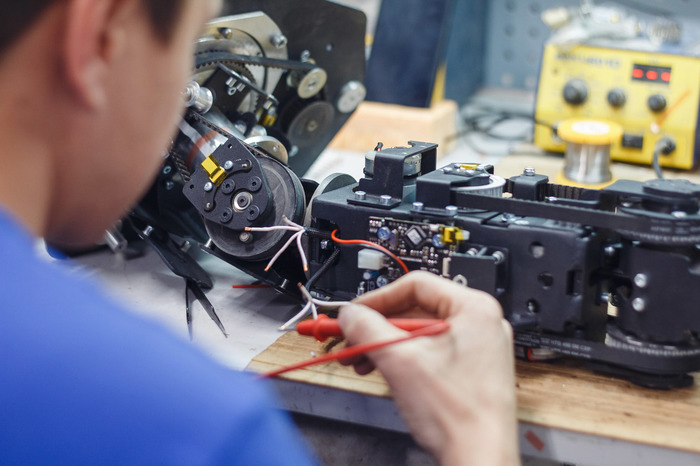
Большинство аппаратных компонентов разработаны нами собственноручно, за исключением вычислительных модулей. Вычислительные модули — это обычный компьютер, уменьшенный в разы. А все платы управления, сервоприводы и так далее — все это сделано нашими специалистами в Перми.
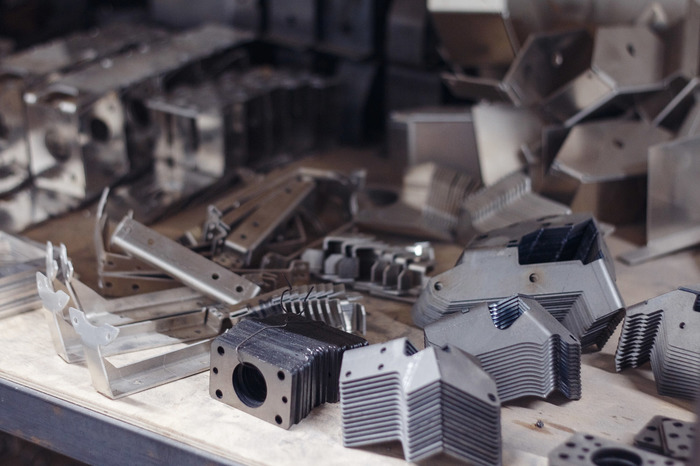
Если смотреть в процентном соотношении, то у нас сейчас 70 отечественных и собственных комплектующих на 30 импортных. Из этих 70 — половина наших комплектующих. Металл изготавливается подрядчиками в Перми, по нашим чертежам. Детали корпуса — сам пластик закупаем, но формуем у нас на производстве. Вся аппаратная составляющая разрабатывается и собирается тоже нами. Практически все делаем сами.
Используете ли Вы ROS? Какие-то другие технологии в софте?
Мы использовали его с самого начала. Когда мы начинали, у нас не было программистов и я делал все сам. Я случайно выбрал ROS, по нему было много видео-пособий. А в последствии оказалось, что это было правильным решением.
Кстати, говоря о граблях, то не стоит изобретать велосипед и пытаться придумать все с нуля. Нужно пользоваться тем, что уже есть и адаптировать.
Мы это делаем по сей день. Если нам нужен пакет навигации, то берем что-то из открытых источников и дорабатываем под себя. И когда долго идет работа, уж ничего не остается от исходных данных. Но в начале это дает некую точку роста, относительно которой ты можешь двигаться.
Раньше использовали OpenCV — библиотека для распознавания образов и изображений. Она до сих пор у нас используется, но очень мало. Распознавание лиц сейчас у нас реализуется через решение от партнеров. Это не наша разработка, однако мы давно работаем с ними и поставляем массивную BigData. То есть слепки изображений со всех роботов, которых уже больше четырех сотен. На их основе программа все лучше и лучше распознает.
Лингобаза, с помощью которой общается робот, также полностью наша разработка. Она начала свою разработку еще с 2014 года, потом претерпела значительную доработку и вышла вторая версия системы. По сути, сейчас она содержит несколько составляющих — это база данных с парами ответ-вопрос, и есть часть, написанная с применением нейросетей, с помощью которой он может искать ответы на вопросы по тексту.
Распознавание речи пробовали от Google и Яндекс. В итоге, сейчас работаем над своим. Потому что параметры распознавания у телефона, который лежит рядом, и у робота на выставке — разные. Мы вручную обрабатывали запросы с роботов из шумных мест, с разными особенностями речи, и на основе этих данных научили систему распознавать хорошо в тех условиях, в которых находится робот.
Поддерживаете ли Вы какие-то opensource проекты? Публикуете ли в открытый доступ часть своих наработок?
Нет.
Вы сделали классный сервис для создания движений роботов. Как работает Motion studio? Какие технологии используете? Как происходит рендеринг?
Это веб-сервис. В основе лежит 3D модель робота, на ней есть интерактивные узлы, которые можно крутить, вертеть, строить из них движения. Из этого можно создать сценарий, добавить музыку, поменять цвета подсветки и так далее. Сценарий сохраняется и переносится на робота в виде файла.
Какие у вас планы и перспективы, связанные с Промобот?
В скором времени мы запускаем свой техноблог. Вести его буду я и мои коллеги, мы планируем рассказывать о том, как делается наш робот, создавать обзоры на новинки, технику, тренды в мире робототехники.
Если говорить о глобальных планах компании, то сейчас мы работаем над расширением географии поставок, отработке новых кейсов применения, например, робот-консьерж, робот-консультант, робот-экскурсовод. Это некая совокупность функций, разработанная для работы в специфичной отрасли. В компании мы называем это кейсами применения. И непрерывное улучшение, конечно же.
P.S.: От себя хочу добавить, что безумно приятно, что у нас в России есть такие компании. Это показатель того, что для успеха не обязательно уезжать из РФ, не обязательно даже переезжать в Москву. Все барьеры находятся внутри нас. Promobot, спасибо!