
Осваиваю ROS(Robot Operating System) и делаю 2wd платформу
Всем привет. Желание конструировать у меня не пропадает с самого детства. Новые игрушки на глазах родителей разбирались моментально и собиралась какая-то неведомая дичь. Первая батарейка и горящая лампочка от неё, первое короткое замыкание, паяльник, канифоль и прочее прочее постепенно добавлялось с возрастом и мозгами. Первый класс, первый компьютер, не понимая тогда вообще ни чего в нем удалял разные dll файлы считая себя хакером и получая годных люлей когда слетал windows. Первое Hello World на Паскаль, эх, как давно это все было. Но энтузиазм не угасает по сей день. Первая попытка сделать, что-то удаленно управляемое была в 2015 году, эта была обычная машинка с веб-камерой и raspberry pi на борту, управление происходило через браузер с помощью скрипта на python + flask.

На данный момент скилл в программировании, электроники подкачался и бывают разные попытки, сделать что-то интересное, пусть даже и бесполезное(как тут https://pikabu.ru/story/popyitka_postroit_i_nauchit_deltarobota_igrat_na_sintezatore_7642204 ), для меня главное опыт.
И сейчас я решил добавить в свою копилку знаний разработку автономных платформ с использованием ROS. А почему бы и нет?
Robot Operating System (ROS) - это гибкая платформа (фреймворк) для разработки программного обеспечения роботов. Это набор разнообразных инструментов, библиотек и определенных правил, целью которых является упрощение задач разработки ПО роботов. (определение взял тут)
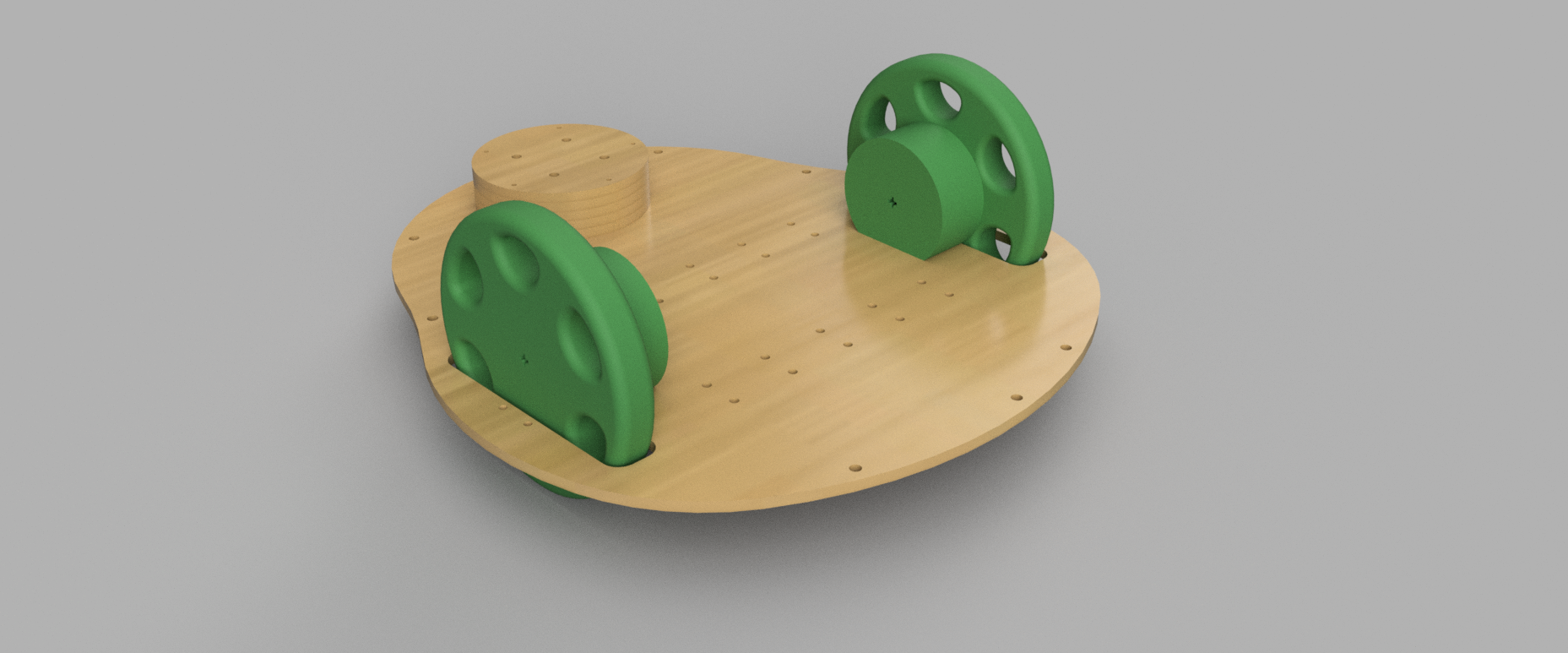
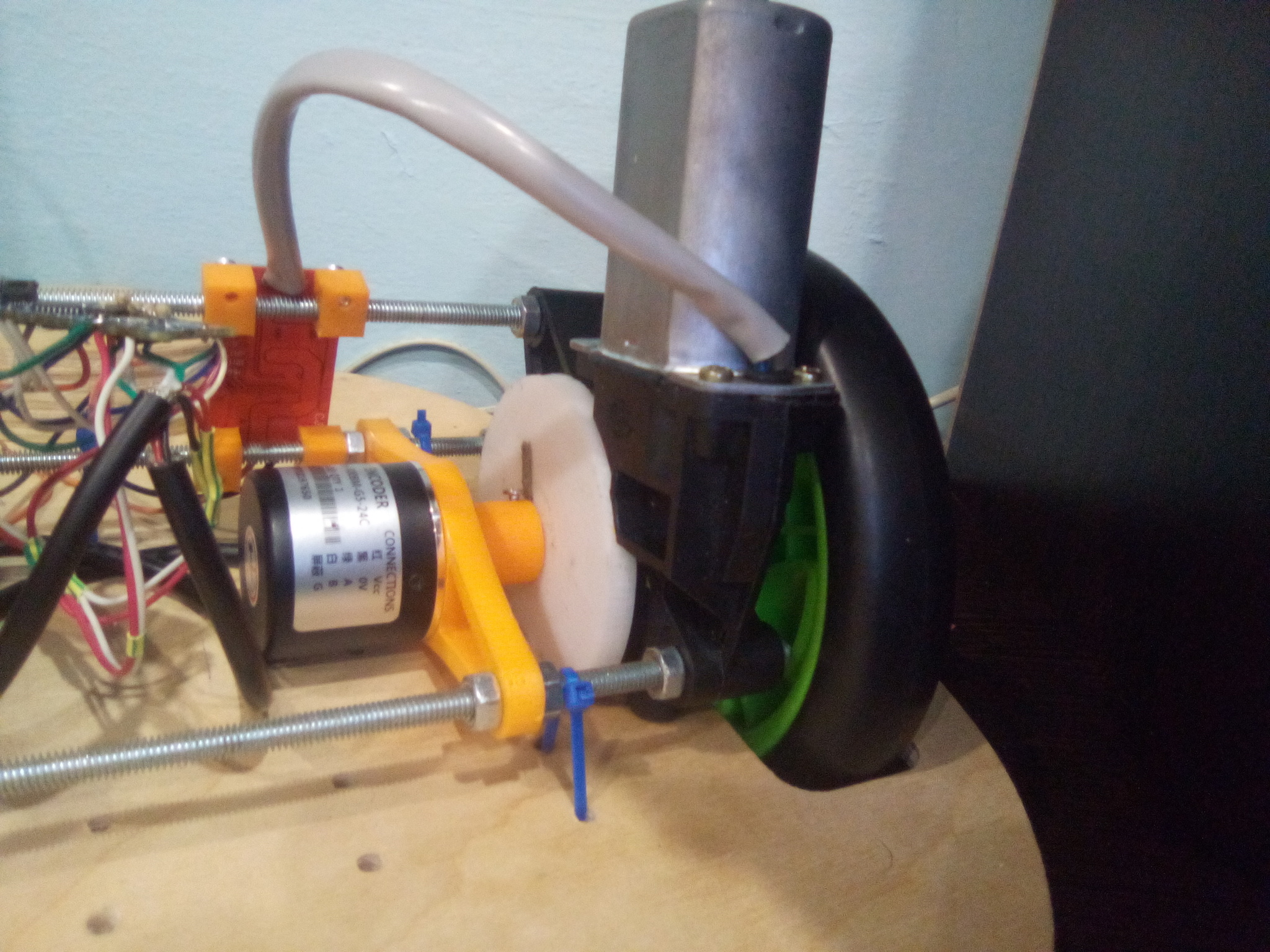
Первым делом, заказал два моторчика от стеклоподъемников, которые приводят платформу в движение и энкодеры которые с помощью PID регулятора поддерживают заданную скорость вращения, Arduino nano, banana pi m3 вместо raspberry pi 4 и китайский лидар. Когда это добро пришло, смоделировал платформу и вырезал на ЧПУ, так же смоделировал крепления энкодеров к моторчику стеклоподъемников, подключил все это дело к Arduino nano, залил прошивку, установил пакет ros на banana pi которая в дальнейшем встанет на платформу.
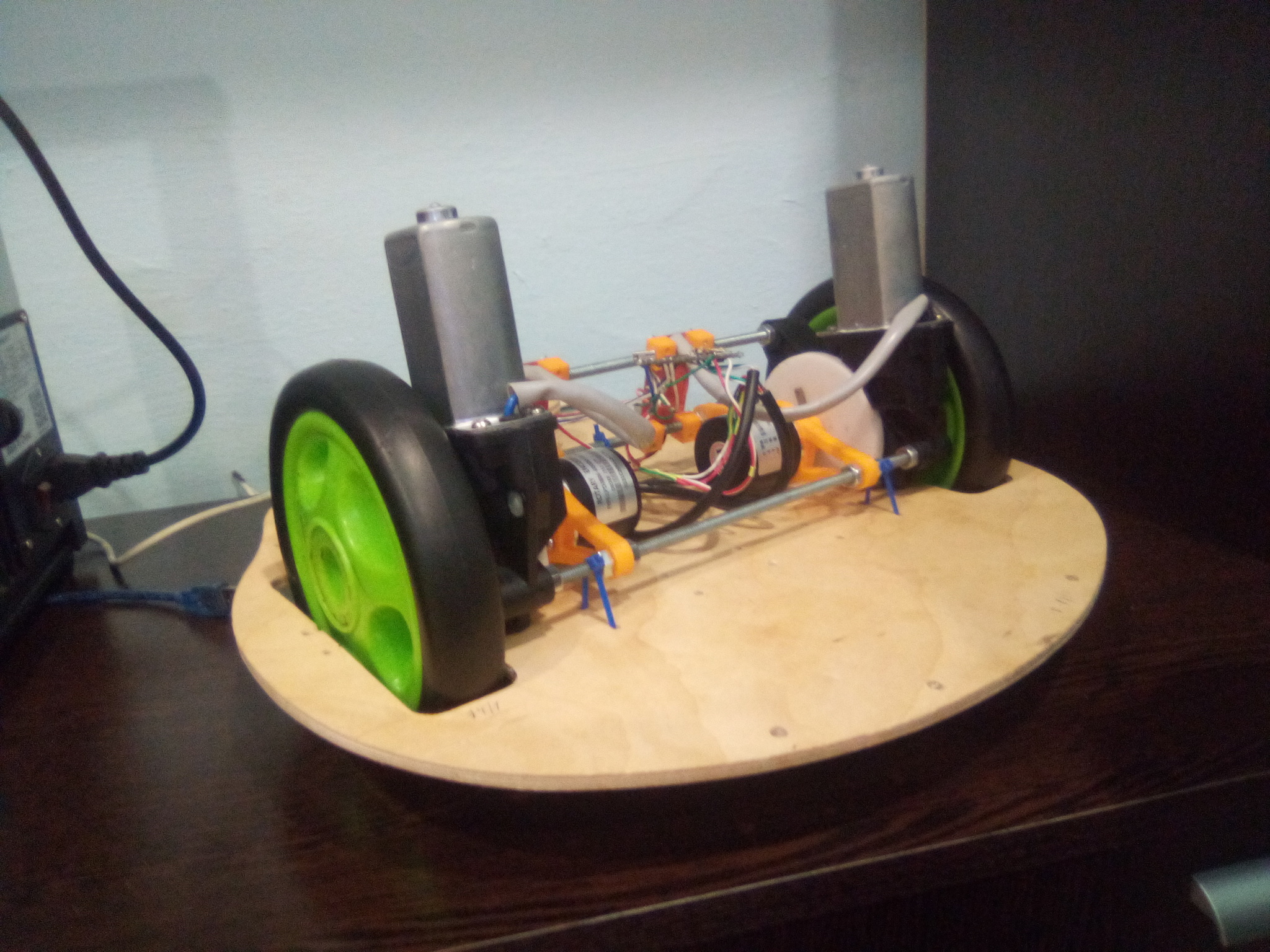
На данный момент могу только в управлять и в программе для визуализации(rviz) получать положение платформы
Следующий этап перенести banana pi на платформу, поставить kinnect 360 + лидар для создания карты помещения и попробовать запустить платформу автономно. И останется самое сложное все это облагородить, а именно попробовать включить фантазию и смоделировать красивый корпус. На этом пока всё:)
Arduino & Pi
1.5K поста20.9K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте - используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
• Нарушать установленные правила Пикабу