
Кватернионы через призму четырёхполярности (L4): формализация многополярности на базе суперпозиционных четырёхполярных систем (часть 2)
Ниже продолжение первой статьи
2. Одна ось как L4‑янтра: простая и строгая основа
Чтобы построить кватернионы без «магических правил», я начинаю с одной оси — предельно простой и замкнутой системы.
Как устроена одна ось (на примере i)
Возьмём ось i. Внутри неё — ровно четыре состояния, образующие цикл:
{ (+), i, (−), (−i) }.
Это не произвольный набор символов, а чёткая структура:
(+) — начальная точка (0°);
i — поворот на 90°;
(−) — поворот на 180°;
(−i) — поворот на 270°.
Между ними действует **закон отношений ***, который мы уже знаем:
x∗y=dec((enc(x)+enc(y))mod4),
где:
enc переводит символ в номер: (+) → 0, i → 1, (−) → 2, (−i) → 3;
dec делает обратное преобразование.
Базовые равенства: что всегда верно внутри одной оси
Применяя закон * к оси i, получаем неизменные равенства — они следуют из структуры цикла и не зависят от «кватернионных» правил:
i ∗ i = (−)
enc(i) = 1 → 1 + 1 = 2 → 2 mod 4 = 2 → dec(2) = (-)
Смысл: два шага по 90° дают поворот на 180°.(−) ∗ (−) = (+)
enc(-) = 2 → 2 + 2 = 4 → 4 mod 4 = 0 → dec(0) = (+)
Смысл: два поворота на 180° — полный оборот, возвращаемся в начало.i ∗ (−) = (−i)
1 + 2 = 3 → 3 mod 4 = 3 → dec(3) = (-i)
Смысл: шаг на 90°, затем на 180° — итого 270° (три четверти оборота).i ∗ (−i) = (+)
1 + 3 = 4 → 4 mod 4 = 0 → dec(0) = (+)
Смысл: поворот на 90° вперёд и на 270° назад — полный круг.(+) ∗ x = x (для любого x в оси)
enc(+) = 0 → 0 + enc(x) = enc(x) → dec(enc(x)) = x
Смысл: «нулевой» поворот ничего не меняет.
Важно: эти равенства — не «кватернионные», а чисто L4‑логические. Они верны для любой оси, потому что следуют из:
замкнутости цикла;
правила счёта по модулю 4;
фиксированной нумерации состояний.
То же самое для осей j и k
Ось j устроена идентично:
состояния: {(+), j, (−), (−j)};
равенства: j ∗ j = (−), (−) ∗ (−) = (+), (+) ∗ x = x.
Ось k — аналогично:
состояния: {(+), k, (−), (−k)};
равенства: k ∗ k = (−), (−) ∗ (−) = (+), (+) ∗ x = x.
Что общего у всех трёх осей:
Общий центральный знак (−) — это «пол‑оборота» в каждой оси.
Общая единица (+) — начальная точка отсчёта, не меняющая другие элементы.
**Единый закон *** — счёт по кругу с mod 4.
Почему это важно
Нет «кватернионной магии» — всё строится на одной простой модели (L4).
Повторяемость — три оси устроены одинаково, что упрощает понимание.
Фундамент для склейки — когда мы начнём связывать оси, эти внутренние равенства останутся неизменными. Они — «скелет», на который «наращивается» некоммутативность.
Итог
Одна ось (i, j или k) — это:
замкнутая система из четырёх состояний;
чёткие правила умножения через счёт по модулю 4;
неизменные равенства, которые выводятся из структуры цикла.
Это база, на которой мы построим кватернионы:
сначала покажем, как оси «склеиваются»;
затем увидим, откуда берётся i ∗ j = k и почему j ∗ i = (−k);
и всё это — без произвольных аксиом, только из логики L4 и правил склейки.
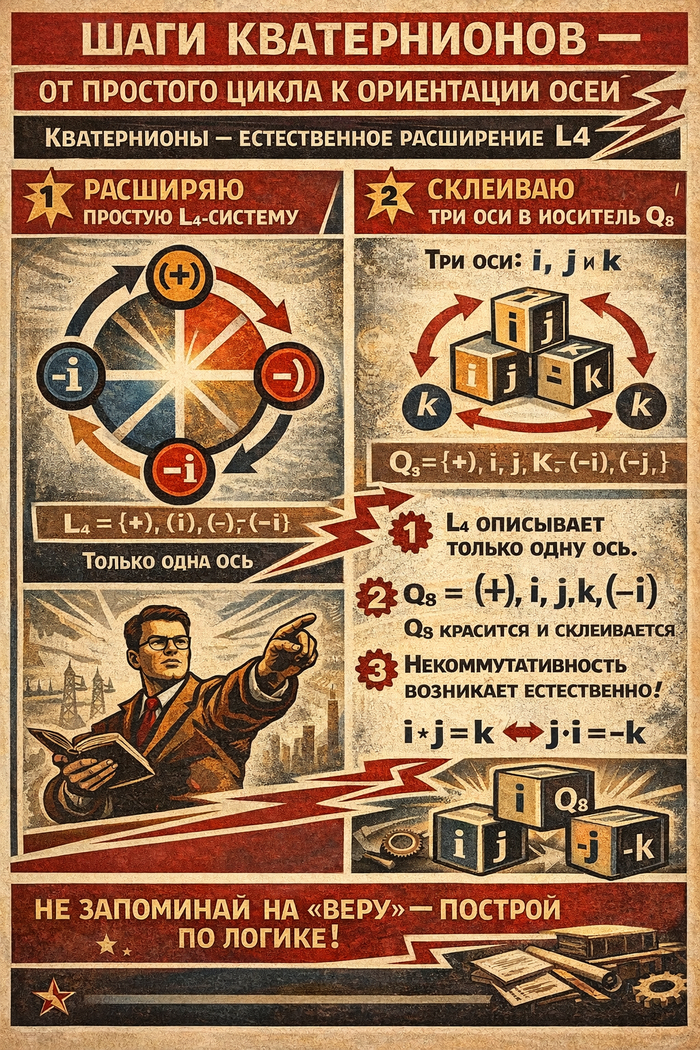
3. Склейка трёх L4-янтр: как получается носитель из 8 элементов
Мы уже разобрали, как устроена одна ось (L4‑янтра) — замкнутый цикл из четырёх состояний с чёткими правилами умножения. Теперь делаем следующий шаг: склеиваем три таких янтры (для осей i, j, k) в единую структуру.
Что значит «склеить по общим полюсам»
Ключевое правило склейки:
Единица (+) — общая для всех трёх осей. Это единая точка отсчёта, «ноль» системы.
Центральный знак (−) — общий для всех осей. Это единый «пол‑оборота», не зависящий от направления.
«Боковые» элементы — свои для каждой оси:
для i: ±i;
для j: ±j;
для k: ±k.
Смысл склейки:
Мы не создаём три отдельных мира — мы строим единое пространство с общей системой отсчёта.
(+) и (−) работают как «каркас», к которому крепятся три независимые «ветви».
Каждая ось сохраняет свою внутреннюю L4‑структуру, но делится с другими осями базовыми полюсами.
Как получается носитель Q₈ из 8 элементов
Склеивая три янтры, мы объединяем их состояния, убирая дублирование общих полюсов:
Общие элементы (по одному на всю систему):
(+) — единица;
(−) — центральный знак.Уникальные элементы (по паре на каждую ось):
ось i: i, (−i);
ось j: j, (−j);
ось k: k, (−k).
Итого:
Q8={ (+), (−), i, (−i), j, (−j), k, (−k) }.
Это и есть носитель кватернионов — множество из 8 элементов, на котором далее будет задан закон умножения.
Наглядный образ для обывателя
Представьте три одинаковых круга-циферблата (каждый — как часы с 4 делениями):
На каждом круге есть отметки: «верх» (+), «низ» (−), «право» (свой для каждого круга), «лево» (свой).
Вы склеиваете эти круги по отметкам «верх» и «низ» — они становятся общими.
«Право» и «лево» остаются уникальными для каждого круга: на первом — это i и (−i), на втором — j и (−j), на третьем — k и (−k).
В итоге получается одна фигура с:
двумя общими точками (+) и (−);
шестью «боковыми» элементами (по два на каждую ось).
Что мы получили (и чего ещё нет)
Есть:
Единый носитель Q8 из 8 элементов.
Сохранение L4‑структуры внутри каждой оси: например, для i по‑прежнему верны равенства i ∗ i = (−), i ∗ (−) = (−i) и т. д.
Общие полюса (+) и (−), связывающие все оси.
Ещё нет:
умножения между разными осями (например, i ∗ j или j ∗ k);
правила, как взаимодействуют элементы разных «ветвей».
Это следующий шаг — задать закон склейки, который определит:
что даст i ∗ j;
почему j ∗ i не равно i ∗ j;
откуда берётся i ∗ j = k и j ∗ i = (−k).
Почему это важно
Прозрачность конструкции. Q₈ не «данность свыше» — он собран из трёх L4‑янтр по чётким правилам.
Отсутствие избыточности. Общие полюсы (+) и (−) не дублируются — система экономна.
Готовность к расширению. Носитель Q₈ — это «скелет», на который мы наложим закон умножения между осями.
Интуитивность. Образ «трёх кругов, склеенных по полюсам» помогает увидеть структуру без погружения в абстракции.
Итог
Склейка трёх L4‑янтр даёт нам:
носитель Q₈ из 8 элементов;
общий каркас (+) и (−) для всех осей;
три независимые ветви ±i, ±j, ±k;
готовую основу для введения умножения между осями.
Теперь мы можем перейти к главному: как из этой структуры рождается кватернионная алгебра — с её некоммутативностью и правилом i ∗ j = k.
4. Где появляется кватернионная структура: фиксация ориентации через межосевые правила
На предыдущем этапе мы собрали носитель Q₈ из 8 элементов, склеив три L4‑янтры по общим полюсам (+) и (−). Теперь переходим к главному: задаём правила взаимодействия между осями — именно здесь рождается кватернионная алгебра.
Суть межосевого умножения
Нам нужно определить, что означает, например, i ∗ j или j ∗ k. Ключевое решение: я фиксирую ориентацию — выбираю «правильный» порядок обхода осей и объявляю, какой результат он даёт.
Три базовых правила
Я задаю следующие равенства:
i ∗ j = k;
j ∗ k = i;
k ∗ i = j.
Смысл: если двигаться по кругу i → j → k → i, то произведение двух соседних осей даёт следующую ось в цепочке.
Почему это не произвол
Эти правила — не случайные соглашения, а явный выбор ориентации. Их можно понять через аналогию:
Правый винт (правило буравчика). Если вращать винт от первой оси ко второй по кратчайшей дуге, то он будет ввинчиваться в направлении третьей оси. Например:
от i к j — получаем k (винт ввинчивается «вперёд»);
от j к k — получаем i;
от k к i — получаем j.Циклический порядок. Правила задают «положительный» обход тройки осей. Это как выбрать направление движения по кругу: по часовой стрелке или против. Я выбираю одно направление и следую ему последовательно.
Что это даёт
Некоммутативность как следствие.
Если поменять порядок множителей, результат изменится:
j ∗ i не равно k — потому что обход j → i противоположен «правильному» направлению;
вместо k мы получим (−k) (зеркальный образ), как будет показано ниже.Замкнутость системы.
Произведение любых двух «боковых» элементов (±i, ±j, ±k) всегда даёт элемент из Q₈:
либо другой «боковой» элемент (i, j, k);
либо общий знак (−);
либо единицу (+).Связь с зеркалом.
Правила позволяют вывести, что:j ∗ i = m(i ∗ j) = m(k) = (−) ∗ k = (−k).То есть перестановка множителей автоматически включает зеркало — результат становится «отражённым».
Пример вывода других равенств
Используя базовые правила и свойства L4, можно получить остальные произведения:
i ∗ k:
из k ∗ i = j следует i ∗ k = m(j) = (−j) (переставили множители → применили зеркало);j ∗ i:
из i ∗ j = k следует j ∗ i = m(k) = (−k);k ∗ j:
из j ∗ k = i следует k ∗ j = m(i) = (−i).
Почему это работает
Единство правил. Все произведения выводятся из трёх базовых равенств и операции зеркала. Нет «особых случаев» — система замкнута.
Ориентация как каркас. Выбор «правильного» обхода i → j → k задаёт структуру, аналогичную правовинтовой системе координат.
Зеркало как предохранитель. Оно гарантирует, что перестановка множителей не проходит «тихо» — результат всегда меняется на зеркальный.
Итог
Кватернионная структура рождается здесь — в момент, когда:
я фиксирую ориентацию через три межосевых правила (i ∗ j = k и т. д.);
задаю циклический порядок i → j → k, который определяет «положительный» результат;
связываю перестановку множителей с операцией зеркала (некоммутативность).
Теперь у нас есть:
носитель Q₈ (8 элементов);
внутренние правила умножения внутри каждой оси (L4);
межосевые правила, задающие ориентацию и некоммутативность.
Это полный фундамент для кватернионной алгебры. Дальше остаётся формализовать закон умножения на всём Q₈, опираясь на эти принципы.
5. Почему при перестановке множителей появляется знак (и почему это неизбежно)
Ключевая идея: некоммутативность кватернионов — не произвол, а следствие фиксации ориентации. Разберём пошагово, как это работает в моей схеме.
1. Исходный принцип: ориентация задаёт «правильный» порядок
Я зафиксировал три базовых правила умножения:
i ∗ j = k;
j ∗ k = i;
k ∗ i = j.
Это ориентированный обход i → j → k → i. Он определяет, что:
произведение двух соседних осей даёт следующую ось в цикле;
порядок множителей имеет смысл («идти от i к j» ≠ «идти от j к i»).
2. Перестановка множителей = смена ориентации
Если я меняю порядок (y ∗ x вместо x ∗ y), я нарушаю исходный ориентированный цикл. Это не «просто переписал» — я перешёл в противоположную ориентацию.
Как отразить это в алгебре? Через зеркало m(x) = (−) ∗ x, которое уже есть в L4.
3. Общий закон переворота порядка
Я ввожу жёсткое правило:
y ∗ x = m(x ∗ y).
Смысл:
если вы поменяли местами множители, результат должен быть «отражён» через зеркало;
зеркало m — это след смены ориентации;
без m вы теряете информацию о том, что порядок был изменён.
4. Применение к межосевым правилам
Теперь последовательно применяем закон y ∗ x = m(x ∗ y) к базовым равенствам.
Пример 1. i ∗ j = k. Что будет при j ∗ i?
По закону переворота: j ∗ i = m(i ∗ j);
Подставляем i ∗ j = k: j ∗ i = m(k);
Применяем зеркало: m(k) = (−) ∗ k = (−k);
Итог: j ∗ i = (−k).
Пример 2. j ∗ k = i. Что будет при k ∗ j?
k ∗ j = m(j ∗ k);
m(j ∗ k) = m(i);
m(i) = (−) ∗ i = (−i);
Итог: k ∗ j = (−i).
Пример 3. k ∗ i = j. Что будет при i ∗ k?
i ∗ k = m(k ∗ i);
m(k ∗ i) = m(j);
m(j) = (−) ∗ j = (−j);
Итог: i ∗ k = (−j).
5. Почему это неизбежно
Зеркало уже есть в системе.
m(x) = (−) ∗ x — это операция, которую мы определили ещё в L4 для одной оси. Она:
вычислима (через enc и dec);
обратима (m(m(x)) = x);
геометрически понятна (поворот на 180°).Ориентация требует следа.
Если вы меняете порядок множителей, вы меняете направление обхода по циклу i → j → k. Чтобы сохранить информацию об этом изменении, нужно:
либо ввести новое правило для каждого случая (произвол);
либо использовать уже существующую операцию (зеркало).
Я выбираю второе — это экономно и строго.Нет «свободы выбора».
Вы не можете сказать: «Давайте сделаем j ∗ i = k, как и i ∗ j». Это:
нарушило бы ориентацию (два противоположных обхода дают один результат);
привело бы к парадоксу (k = −k);
разрушило бы структуру Q₈.Симметрия сохраняется.
Правила x ∗ y = z и y ∗ x = (−z) образуют симметричную пару:
прямой порядок даёт z;
обратный порядок даёт (−z) — зеркальный образ.
Это не случайность, а следствие геометрии.
6. Геометрическая аналогия
Представьте три оси в пространстве (x, y, z) и правило правой руки:
Если вы поворачиваете от x к y, большой палец показывает в направлении z.
Если вы поворачиваете от y к x, большой палец покажет в противоположном направлении (−z).
В кватернионах:
i, j, k — это «оси» в абстрактном пространстве;
правило i ∗ j = k — аналог правила правой руки;
j ∗ i = (−k) — следствие смены направления вращения.
Итог
Знак «минус» при перестановке множителей:
не запоминается, а выводится из закона y ∗ x = m(x ∗ y);
не произвол, а след смены ориентации;
не исключение, а часть единой системы (зеркало m уже есть в L4);
геометрически осмыслен (аналог правила правой руки).
Так некоммутативность становится прозрачной: она рождается из:
фиксации ориентированного цикла i → j → k;
применения зеркала m при нарушении этого цикла.
Это не «магия кватернионов», а логика ориентации.
6. Показательное место: как в моей схеме запрещена типовая ошибка
Именно этот момент — ключевой для устранения мнимых «противоречий» в кватернионной алгебре. Разберём механизм защиты пошагово.
Суть типовой ошибки (как она возникает)
На первом шаге корректно выводится:i ∗ j = k.
Позже, в ходе преобразования, встречается выражение j ∗ i.
Нерадивый исследователь незаметно подменяет j ∗ i на i ∗ j (как если бы умножение было коммутативным).
Получает:j ∗ i = i ∗ j = k,но по правилам кватернионов j ∗ i = (−k).
Возникает «парадокс»:k = (−k),что якобы доказывает «противоречивость кватернионов».
Почему это невозможно в моей схеме
Я ввёл жёсткое правило связи порядка и зеркала:
y ∗ x = m(x ∗ y),
где m(z) = (−) ∗ z — операция зеркала.
Это значит:
j ∗ i не может быть равен i ∗ j, потому что между ними стоит оператор m;
переход от i ∗ j к j ∗ i требует явного применения зеркала:j ∗ i = m(i ∗ j) = m(k) = (−) ∗ k = (−k).
Оператор m нельзя «проглотить» — он:
вычислим (через enc и dec);
геометрически осмыслен (поворот на 180°);
структурно обязателен (без него нарушается ориентация).
Что происходит, если кто‑то всё‑таки пишет j ∗ i = i ∗ j
Такой шаг автоматически влечёт утверждение:
m(i ∗ j) = i ∗ j,
то есть:
m(k) = k.
Но по определению зеркала:
m(k) = (−) ∗ k = (−k).
Значит, допущение j ∗ i = i ∗ j приводит к:
(−k) = k.
Почему это не «противоречие кватернионов», а ошибка трассы
Ошибка очевидна.
Равенство (−k) = k означает, что элемент равен своему зеркальному отражению. Это возможно только если:
k = 0 (тривиальный случай);
система потеряла ориентацию (схлопнулась).В Q₈ ни то, ни другое не выполняется — значит, допущена ошибка.Механизм защиты прозрачен.
Ошибка не скрывается за «сложностью кватернионов», а прямо указывается на нарушение правила:
«Вы удалили оператор m, который обязан стоять между y ∗ x и x ∗ y».Нет места двусмысленности.
В моей схеме нельзя «забыть» про некоммутативность — она закодирована в:
ориентированном цикле i → j → k;
операции зеркала m;
жёстком законе y ∗ x = m(x ∗ y).
Аналогия: «потеря знака» в арифметике
Представьте, что кто‑то пишет:
5 + (−3) = 5 + 3,
и получает 2 = 8.
Это не «противоречие арифметики», а ошибка трассы:
пропущен знак «минус»;
нарушено правило сложения с отрицательным числом.
Точно так же в моей схеме:
пропуск m — это «потеря знака ориентации»;
равенство j ∗ i = i ∗ j — аналог 5 + (−3) = 5 + 3.
Итог
Моя схема:
Запрещает неявную подмену j ∗ i на i ∗ j.
Требует явного применения зеркала m при перестановке множителей.
Превращает мнимые «противоречия» в очевидные ошибки трассы:
если кто‑то утверждает j ∗ i = i ∗ j, он автоматически утверждает (−k) = k;
это явно абсурдно в Q₈, значит, шаг неверен.
Таким образом, кватернионы перестают быть «странной алгеброй» и становятся прозрачной системой, где каждая операция имеет чёткий смысл, а ошибки легко диагностируются.
7. Самый короткий вывод для обывателя: что такое кватернионы в моём понимании
Представьте, что вы собираете конструкцию из трёх одинаковых деталей. Каждая деталь — это L4‑ядро: простой цикл из четырёх состояний:
{ (+), u, (−), (−u) }.
Это как циферблат с четырьмя делениями: «верх», «право», «низ», «лево». Внутри каждой оси всё просто и понятно: шаги по кругу, правила умножения — как счёт по модулю 4.
Как рождается кватернион
Склеиваем три оси.
Берём три таких «циферблата» — для i, j, k. Склеиваем их по общим точкам:
(+) — единая точка отсчёта («ноль»);
(−) — общий «пол‑оборота».Получается единый носитель из 8 элементов:Q8={ (+), (−), i, (−i), j, (−j), k, (−k) }.Фиксируем ориентацию.
Задаём «правильный» порядок обхода: i → j → k. Это даёт три ключевых равенства:
i ∗ j = k;
j ∗ k = i;
k ∗ i = j.Это не произвол, а выбор направления — как правило правой руки в физике.Вводим зеркало для смены порядка.
Если поменять местами множители (y ∗ x вместо x ∗ y), мы нарушаем ориентацию. Чтобы это зафиксировать, применяем зеркало m(x) = (−) ∗ x.Закон переворота порядка:y ∗ x = m(x ∗ y).Примеры:
j ∗ i = m(i ∗ j) = m(k) = (−k);
k ∗ j = m(j ∗ k) = m(i) = (−i);
i ∗ k = m(k ∗ i) = m(j) = (−j).
Что в итоге
Кватернионы — это не загадочная алгебра, а чёткая конструкция из четырёх компонентов:
Три одинаковых L4‑контура (оси i, j, k) — простые циклы с шагами по 90°.
Общие полюса (+) и (−) — каркас, объединяющий оси.
Закон ориентации (i ∗ j = k и т. д.) — правило «правильного» обхода.
Зеркало m — след смены порядка: если поменяли множители, результат отражается.
Почему это работает
Нет «магии». Всё выводится из базовых правил: цикл → склейка → ориентация → зеркало.
Некоммутативность понятна. Она не «странность кватернионов», а следствие смены ориентации.
Ошибки видны. Если кто‑то пишет j ∗ i = i ∗ j, это сразу видно как нарушение: получается (−k) = k, что абсурдно.
Система замкнута. Все произведения остаются в Q₈, правила согласованы.
Итог:
Кватернионы — это три «круга» (L4), склеенные по общим полюсам, с ориентацией обхода и зеркалом для смены порядка. Всё просто, если видеть структуру.
8. Итог главы 2
В этой главе я выполнил следующие ключевые шаги:
Построил носитель Q₈ как суперпозицию (в терминологии В. Ленского) трёх L4‑янтр. Это не механическое объединение, а осмысленная склейка по общим полюсам:
единая единица (+) для всех осей;
общий центральный знак (−);
собственные «боковые» элементы (±i, ±j, ±k) для каждой оси.В результате получился строго определённый набор из 8 элементов, где каждый имеет чёткое происхождение и роль.
Раскрыл суть межосевых правил (i * j = k, j * k = i, k * i = j) как фиксации ориентации. Это не произвольные соглашения, а формализация «правильного» циклического порядка i → j → k, аналогичного правилу правой руки в трёхмерном пространстве.
Продемонстрировал, что знак «минус» при перестановке множителей — не условность или «оговорка», а прямое следствие работы оператора зеркала m(x) = (-) * x. Перемена порядка множителей (y * x вместо x * y) неизбежно активирует зеркало: y * x = m(x * y). Это не опция, а жёсткое правило, встроенное в структуру.
Тем самым исключил возможность типичной ошибки «подмены ji на ij». В моей схеме такая подмена автоматически выявляются, потому что:
между j * i и i * j всегда стоит оператор m;
попытка приравнять их ведёт к абсурдному утверждению m(k) = k, то есть (−k) = k;
это явно указывает на нарушение правил, а не на «противоречивость» кватернионов.
В главе 3 я перехожу к практическому применению этой схемы. Я:
разберу конкретный «парадокс» (аналогичный приведённому в вашем тексте про i * j * k = −1) пошагово;
покажу, в какой именно момент традиционные изложения допускают ошибку подмены порядка множителей;
продемонстрирую, как моя L4‑схема автоматически обнаруживает и исправляет эту ошибку благодаря строгому применению оператора зеркала m(x) = (−) * x в рамках exp_map;
тем самым докажу, что кажущиеся «противоречия» исчезают, когда все операции выполняются по чётким, заранее определённым правилам.
Глава 3. Разбираем “парадокс кватернионов”: где скрывается ошибка
В этой главе я разбираю самый распространённый «контрдовод» против кватернионов — тот, что часто всплывает в онлайн‑обсуждениях и учебниках как якобы неопровержимое доказательство их «противоречивости». Моя цель — разложить всё по полочкам так, чтобы даже у неподготовленного читателя не осталось ни тени неясности.
Обычно этот аргумент формулируют следующим образом:
«Если i ∗ j ∗ k = (−), то путём простых преобразований можно прийти к равенству k = (−k), а значит, (+) = (−). Следовательно, кватернионы внутренне противоречивы».
Я пошагово продемонстрирую:
Почему это не противоречие, а ошибка рассуждений.
Кажущийся парадокс возникает не из‑за изъяна в кватернионной алгебре, а из‑за нарушения её базовых правил. Это классический пример «ошибки трассы»: человек неосознанно применяет к некоммутативной системе приёмы из обычной (коммутативной) арифметики. Система остаётся логически цельной — проблема исключительно в неверной манипуляции с её элементами.Где совершается единственный критический промах.
Ошибка кроется в неявной подмене: кто‑то без обоснования заменяет j ∗ i на i ∗ j (или аналогичную пару), игнорируя, что в кватернионах порядок множителей принципиально важен. В коммутативной алгебре такое допустимо, но здесь это нарушает законы умножения. Именно этот неучтённый переворот порядка запускает цепочку ложных выводов.Как моя L4‑дисциплина исключает такую ошибку.
В моей схеме любое изменение порядка множителей жёстко регулируется правилом:y ∗ x = m(x ∗ y),где m(x) = (−) ∗ x — операция зеркала. Это означает:
нельзя просто «переставить» множители — нужно явно применить m;
попытка приравнять j ∗ i и i ∗ j автоматически приводит к (−k) = k, что мгновенно выявляет нарушение;
зеркало m не может быть пропущено: оно вычисляется через enc/dec и геометрически соответствует повороту на 180°.Таким образом, L4‑дисциплина не даёт совершить неверный шаг: она требует явного учёта ориентации и действия зеркала при любой перестановке.
Итог: мнимое «противоречие» рождается не из природы кватернионов, а из игнорирования их структуры. Моя схема делает такую ошибку невозможной — она превращает спорный пример в наглядную иллюстрацию того, как работают правила кватернионной алгебры.
1. Напоминаю базовые правила, которые я использую (без скрытых допущений)
Чтобы дальнейший разбор был максимально прозрачным, заранее формулирую все исходные положения — без скрытых допущений и «междустрочных» смыслов. Ниже — полный набор правил, на которых строится вся последующая логика.
1. Общие элементы L4‑структуры (каркас системы)
Эти два элемента едины для всех осей и выполняют роль «несущих конструкций»:
(+) — единица, нейтральный элемент умножения (аналог «1» в обычной арифметике);
(−) — общий центральный знак, соответствующий повороту на 180° (аналог «−1»).
Важно: эти элементы не принадлежат какой‑либо одной оси — они общие для всей системы.
2. Внутренние правила каждой оси (L4‑ядро)
Для каждой из трёх осей (i, j, k) действует одинаковый закон возведения в квадрат:
i ∗ i = (−);
j ∗ j = (−);
k ∗ k = (−).
Это означает:
любой «осевой» элемент при умножении на себя даёт общий знак (−);
внутри каждой оси работает циклическая структура L4 с четырьмя состояниями: (+), u, (−), (−u).
3. Ориентация межосевых произведений (правило «правильного обхода»)
Я фиксирую направленный цикл i → j → k → i, который задаёт три ключевых равенства:
i ∗ j = k;
j ∗ k = i;
k ∗ i = j.
Смысл: произведение двух соседних осей в направлении цикла даёт третью ось. Это не произвольное соглашение, а выбор ориентации — аналог правила правой руки в трёхмерном пространстве.
4. Закон переворота порядка (ключевое правило трассы)
При перестановке множителей обязательно применяется операция зеркала m. Формально:
y ∗ x = m(x ∗ y),
где m(x) = (−) ∗ x.
Что это значит на практике:
Если вы пишете j ∗ i вместо i ∗ j, вы не можете считать их равными.
Вы обязаны применить m к результату i ∗ j:j ∗ i = m(i ∗ j) = m(k) = (−) ∗ k = (−k).
Попытка приравнять j ∗ i и i ∗ j ведёт к абсурду (−k) = k, что сразу выявляет нарушение правила.
Почему это строго:
Зеркало m не является «допущением» — оно уже встроено в L4‑структуру (через операцию поворота на 180°);
Его нельзя проигнорировать: пропуск m эквивалентен подмене объекта;
Правило y ∗ x = m(x ∗ y) гарантирует сохранение ориентации при любых преобразованиях.
Итог: система без «тёмных мест»
Все четыре блока правил:
общие элементы (+) и (−);
внутренние законы осей (u ∗ u = (−));
ориентация межосевых произведений (i ∗ j = k и т. д.);
закон переворота порядка с зеркалом m
— явно сформулированы, взаимосвязаны и не допускают произвольных трактовок.
Это основа, на которой далее будет строиться разбор «парадоксов»: каждое утверждение будет опираться только на эти правила, без скрытых допущений.
2. Что означает i ∗ j ∗ k = (−) и почему с этого начинают
Выражение i ∗ j ∗ k = (−) — не аксиома и не загадочное допущение, а краткая запись цепочки строго следующих из базовых правил действий. Разберём его пошагово.
Шаг 1. Используем правило ориентации межосевых произведений
По зафиксированному нами закону «правильного обхода» (i → j → k) имеем:
i ∗ j = k.
Это не произвольное соглашение, а фиксация направления умножения: произведение двух соседних осей в цикле даёт третью ось.
Шаг 2. Подставляем результат в исходное выражение
Теперь вместо i ∗ j пишем k:
i ∗ j ∗ k = (i ∗ j) ∗ k = k ∗ k.
Здесь мы явно группируем первые два множителя — это допустимо благодаря ассоциативности умножения в кватернионах.
Шаг 3. Применяем внутреннее правило оси L4
Для любой оси (в данном случае — для оси k) действует закон:
k ∗ k = (−).
Это аналог i2 = −1 в комплексных числах, но обобщённый на все три оси. Таким образом:
k ∗ k = (−).
Итог: откуда берётся i ∗ j ∗ k = (−)
Соединяя шаги 1–3, получаем:
i ∗ j ∗ k = (i ∗ j) ∗ k = k ∗ k = (−).
То есть утверждение i ∗ j ∗ k = (−) — это вывод, а не постулат. Оно означает буквально следующее:
«Если перемножить i и j по правилу ориентации (i ∗ j = k), а затем умножить результат на k, то внутри оси k получим k ∗ k = (−)».
Почему именно с этого начинают
Этот пример часто берут за точку входа по трём причинам:
Он компактен. Всего три множителя и один итоговый результат — легко записать и запомнить.
Он опирается на базовые правила. Здесь задействованы:
ориентация межосевых произведений (i ∗ j = k);
внутреннее правило оси L4 (k ∗ k = (−));
ассоциативность умножения (возможность группировать множители).
То есть это «мини‑тест» на понимание всей системы.Он становится почвой для ошибок. Именно из‑за невнимания к порядку множителей и действию зеркала m из этого равенства пытаются вывести «противоречие» (k = (−k) и т. д.). Поэтому разбор i ∗ j ∗ k = (−) — естественный старт для демонстрации того, как L4‑дисциплина предотвращает такие ошибки.
Вывод:
i ∗ j ∗ k = (−) — не таинственный факт, а закономерный результат применения четырёх базовых правил (общих элементов, внутренних законов осей, ориентации и ассоциативности). Его простота делает его идеальным примером для введения в кватернионную алгебру — и для демонстрации того, как неверная трактовка порядка множителей ведёт к ложным «парадоксам».
3. Где рождается «парадокс»: точка слома порядка
Разберём типовую цепочку рассуждений, которая якобы «доказывает» противоречивость кватернионов. Ключевое — показать, где и почему логика ломается.
Шаг А (корректный)
Исходное равенство:
i ∗ j ∗ k = (−).
Умножаем обе части слева на i:
i ∗ (i ∗ j ∗ k) = i ∗ (−).
Правая часть:
i ∗ (−) = (−i)
(по правилу умножения на центральный знак (−)).
Левая часть (используем ассоциативность):
i ∗ (i ∗ j ∗ k) = (i ∗ i) ∗ j ∗ k = (−) ∗ j ∗ k.
(так как i ∗ i = (−) по внутреннему правилу оси L4).
Получаем:
(−) ∗ j ∗ k = (−i).
Теперь «снимаем минус» с обеих сторон (умножаем слева на (−), учитывая, что (−) ∗ (−) = (+)):
j ∗ k = i.
Вывод: это верное равенство, совпадающее с исходным правилом ориентации (j ∗ k = i). На этом этапе всё корректно.
Шаг B (корректный)
Из j ∗ k = i умножаем обе части слева на j:
j ∗ (j ∗ k) = j ∗ i.
Левая часть (ассоциативность + внутреннее правило):
j ∗ (j ∗ k) = (j ∗ j) ∗ k = (−) ∗ k = (−k).
Получаем:
j ∗ i = (−k).
Вывод: это тоже верно — соответствует закону переворота порядка с зеркалом m:
j ∗ i = m(i ∗ j) = m(k) = (−) ∗ k = (−k).
Где возникает «парадокс» (ошибка трассы)
На этом месте кто‑то делает критический неверный шаг:
«Но ведь i ∗ j = k, значит, j ∗ i тоже равно k».
То есть происходит молчаливая подмена:
j * i ≟ i * j
Это грубое нарушение некоммутативности кватернионов:
i ∗ j = k (по правилу ориентации);
j ∗ i = (−k) (по закону переворота порядка с зеркалом m).
Следствие ошибки:
Из верного равенства j ∗ i = (−k) и ложного допущения j ∗ i = k получают:
k = (−k).
Далее, умножая обе части на k (и используя k ∗ k = (−)), выводят:
(+) = (−),
что якобы «доказывает» противоречивость системы.
Почему это не противоречие, а ошибка
Нарушение некоммутативности. В кватернионах x ∗ y не равно y ∗ x для разных осей. Подмена j ∗ i на i ∗ j — это игнорирование базового свойства системы.
Пропуск зеркала m. Правило y ∗ x = m(x ∗ y) требует явного применения m при перестановке. Его отсутствие — ошибка трассы.
Ложная эквивалентность. Утверждение j ∗ i = i ∗ j ведёт к абсурду k = (−k), что мгновенно выявляет нарушение.
Продолжение
Как ЗАПУСТИТЬ архив в новом чате ChatGPT
Вставьте архив в первое сообщение нового чата.
Напишите: «Выполни инструкции в файле DOCS/NEW_CHAT_PROMPT_iter444.md».
Задавайте любые вопросы по теме статьи.