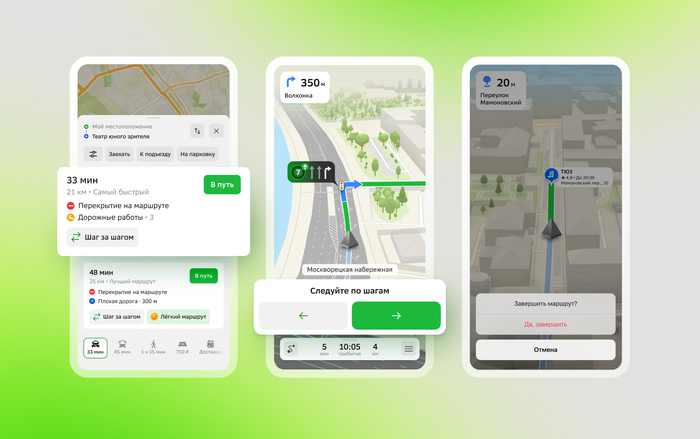

Ответ на пост «Если сигнал спутника нестабилен: 2ГИС поможет не сбиться с маршрута с режимом "Шаг за шагом"»
Привет, коллеги из @2GIS.
А не думали выпускать OBD-2 девайсы для считывания угла руля и одометра в реальном времени при поездке?
Можно довольно точно по ним восстанавливать численно интегрируя треакторию автомобиля, накладывать её на оффлайн-карту дорожной сети строя гипотезы о местоположении авто, и в топовой гипотезе рисовать автомобиль на карте. При этом каждый поворот будет сбрасывать накапливающуюся погрешность геолокации до, примерно, ширины дороги.
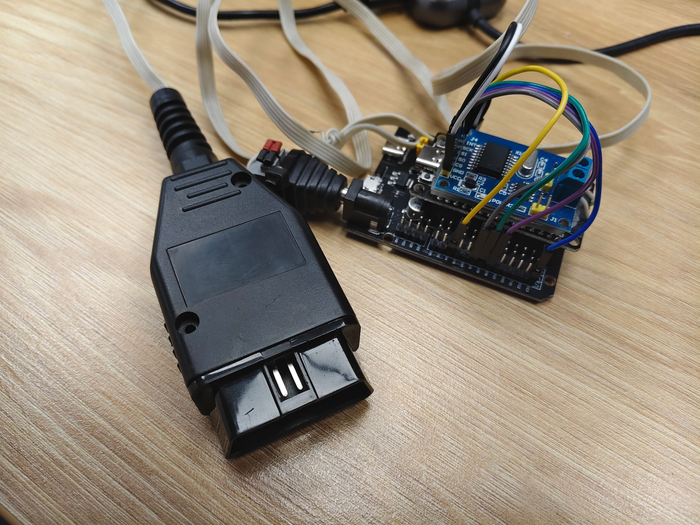
Я не знаю годится ли для этого какой-нибудь стандартный ELM-сканнер, но адаптеров для CAN-шины разных дешевых полно, вот типа MCP2515, а если использовать ESP32 как я в прототипе, то можно и более компактный модуль TJA1050, ведь в ESP32 уже есть поддержка CAN-интерфейса. А ещё есть WiFi и BT. Думаю можно даже прямо на ESP32 и считать всё. Скорости там хватит, а локальный кусок графа дорожной сети не так много весит.
Вот у меня какой прототип вырисовывается, но можно и куда в более компактном размере это запаять.
В любой более-менее современной машине есть на каждом колесе датчик холла, способный точно мерять скорость вращения колеса, угол руля до половины градуса если не детальнее показывает, приделать механизм автокалибровки по маршруту, и получится, что можно без спутников вообще ездить, и пользователя не дёргать шагами этими.
Себестоимость девайса рублей триста в розницу, если на ESP32-c3, например, его соорудить.
Ну или копнуть в поддержку стандартных ELM-сканнеров.
Получилось бы полностью оффлайн-решение, которое давало бы навигацию по маршруту и в произвольной поездке в рамках дорожной сети. Пользователю в экран тыкать не придётся отвлекаться, да и работать будет не только в Москве, а везде где достаточно детально прорисована геометрия дорог.
UPD. Я не знаю как люди читают так невнимательно. Я НЕ ПРЕДЛАГАЮ двойное интегрирование показаний акселерометра. Я предлагаю использовать более стабильные показания одометра. ОДОМЕТРА!
Постоянная ошибка одометра поддаётся автокалибровке по отрезкам маршрута между поворотами.