
Самодельный стратостат. Часть 1a

Допустим, вы интересуетесь космосом, но космос для вас недоступен. Выше 10км не подняться, а посмотреть "что там?" очень хочется. По классификации NASA — нижняя граница космоса начинается на 100км от поверхности Земли. Эта статья будет не совсем про космос, но про возможность создания своего стратосферного зонда с нуля. Я много видел примеров успешного запуска и несколько статей на Хабре, но почти все они — это отчеты. Я же хочу оставить статью, которая сможет претендовать на "complete guide" для юных покорителей. Запаситесь терпением и безлимитным интернетом — будет много текста, картинок и даже пару видео. Это был долгий путь для нас, но я намерен сделать его не таким изнурительным для всех желающих. Поехали?
Вступление
Отступление для Pikabu:
Эта история публиковалась мной на Хабре. Сейчас там 3 статьи из этой серии и мы собираемся выпустить еще отдельную статью по легализации этих запусков в скором будущем (ориентировочно декабрь 2021). Цель "перепубликации" - увеличить покрытие аудитории. Так как мы считаем, что занятие это веселое и не бесполезное. Как минимум, сойдет за не самое тупое и активное времяпрепровождение. Цель всего мероприятия - исключительно просветительская, никакой коммерции!
Пикабу имеет весьма строгое ограничение на размер поста, так что я вынужден разбивать даже одну статью с Хабра на несколько постов.
Ну-с... Если "зайдет" - я продолжу переносить в том же порядке, в котором они выходили на Хабре ;-)
В этом проекте участвовало довольно много людей (навскидку ~10). Один бы я, разумеется, все это не потянул. Да и с друзьями интересней. У каждого была своя незаменимая роль в этом деле. А так как я — организатор, вдохновитель и спонсор всего проекта, то мне выпала честь говорить от имени каждого участника.
Мое непосредственное участие касалось:
- сборки электроники
- программирования
- финансирования
- организационных моментов
- подведения итогов
В запуске, финальной сборке, поиске и спасении я, к сожалению, не смог поучаствовать. Так что в этих разделах буду повествовать от лиц людей, бывавших "на местах".
От идеи до завершения этого проекта прошел почти год. Нет, это не значит, что все так долго, сложно и т.п. Все на самом деле довольно просто, весело и интересно. Это значит: неправильное планирование и незнание особенностей работы некоторых служб. Из-за такого разрыва части этой статьи писались тоже в разное время. Так что в некоторых разделах у меня не сохранились собственные скрины и я поднатягал их из интернета.
Давайте посмотрим на распределение времени по активностям:
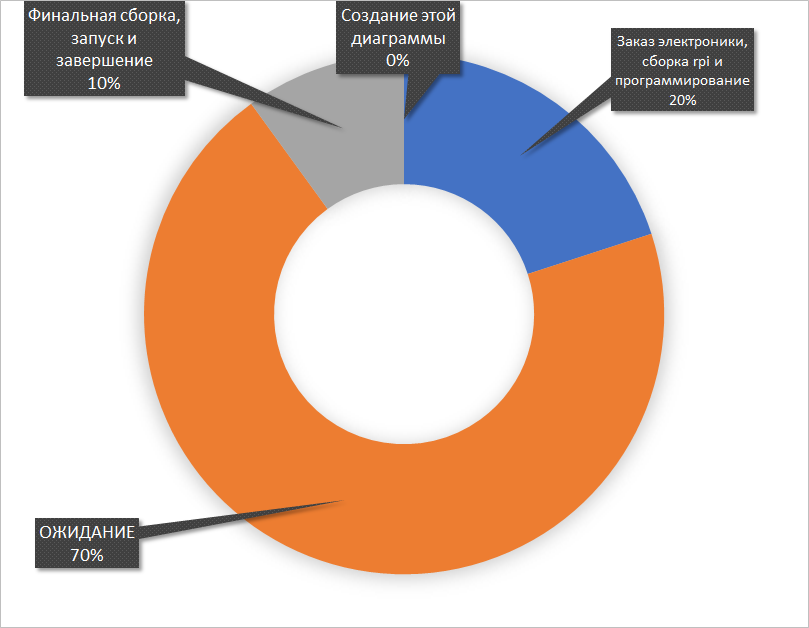
Ожидание… Ожидание служб доставки, ожидание ответа госслужб и, наконец, ожидание весны. Так как никто не хотел искать упавший зонд в ночи. А в регионе запуска (Северо-Запад) зимой темнеет очень рано. Ожидание съело 70% времени. Всегда закладывайте побольше времени в этот сегмент. Ну что я вам рассказываю? Все тут не первый день на IT женаты ;-)
Несмотря на довольно большую задержку нам удалось довести проект до успешного (!) завершения. И сейчас я расскажу вам как.
Список оборудования и компонентов
А начнем мы со списка используемого оборудования. В этом списке ссылки даны на сайты, где это можно купить. Не рекламы ради, а референса и облегчения поиска для:
3. Шар-зонд
4. Фал (канат)
5. Парашют
6. Гелий
7. GoPro 7 Black (+Micro SD card 128GB)
8. Powerbank x2 (20000 mah)
10. LTE GPS HAT — LTE / GPRS / GPS SIM7600E-H — for Raspberry — Waveshare 14952
11. TEMPer Gold USB Temperature Sensor
12. RPI Tall Case
13. RPI Mounting Kit
Вот из чего состоит наш аппарат. Я не включил в этот список некоторые вещи, такие как материал корпуса полезной нагрузки, дюбели, шланги и т.п, т.к. найти их не проблема и они не требуют особых пояснений. А теперь пробежимся по пунктам, требующим этого.
Raspberry Pi 4 Model B
Резонный вопрос: почему не Arduino? Простой ответ — потому что я не умею паять ¯\(ツ)/¯
Вторая причина — я предпочитаю использовать dotnet везде, где это возможно. Но это в меньшей степени повлияло на выбор.
Действительно, если дружите с паяльником — ардуино может стать хорошим выбором. Тем более я видел пару схожих проектов где он успешно используется. А вот в моем случае неумение паять стало причиной выбора USB термометра с весьма скромным диапазоном измерения (и это отразилось на результатах, о них в конце).
SPOT Trace GPS Tracker
Вся затея будет считаться даже не начатой, если после того как ваш шарик улетит, вы не сможете его найти. Так что к технике поиска стоит подойти максимально ответственно.
GPS трекеров существует уйма, а этот, пожалуй, один из самых дорогих (во всяком случае, из тех, что мне встречались).
В чем проблема большинства трекеров, которыми завален любой радиорынок? Давайте подумаем: GPS трекер получает свои координаты с помощь GPS спутников (ну еще компенсирует погрешность по наземным станциям) — это замечательно, спутники покрывают всю поверхность Земли. Также очень замечательно, что наш трекер будет знать своё местоположение. Но нас то рядом с трекером не будет! Как он должен передать свои координаты в наш ЦУП? Самое массовое решение — GSM сети. Иначе говоря — покупаете симку, вставляете в трекер и он шлет вам смс-ки (ммс-ки, или стикеры в телегу, не важно). Я видел примеры успешных запусков с таким подходом. Но если честно, я пару раз выезжал за пределы КАД и готов вас уверить — во многих местах сотовой связи нет совсем! Если наш зонд упадет в такой зоне — провал операции, начинай сначала.
А вот сабж, в отличие от, для передачи координат использует спутниковый канал связи со 100% покрытием. Не буду наседать с рекламой, т.к. удовольствие это не дешевое, да еще и требует платной подписки, равной стоимости самого трекера, но отмечу — раз вы читаете эту статью, значит свою функцию он выполнил. Хотя и дал нам понервничать. Но об этом в разделе про поиск и спасение.
Так что еще раз — отнеситесь к выбору поискового трекера максимально ответственно!
Шар-зонд
Максимально просто — чем больше, тем выше полетит. Мы оперировали примерами успешных запусков из интернета. Там ребята часто использовали шары диаметром 2.5м. В конторе, где мы заказывали свои, нас тоже уверили, что этот — долетит. Немного не долетел, но мы склонны считать, что это не вина шара. Об этом в разделе про результаты.
Фал (канат)
Канат. Это просто тонкий канат. Заказывали у ребят по ссылке, но могли бы и купить в любом магазине за углом.
Парашют
Парашют бесстропный. Не разбираюсь в парашютах, но обратил внимание, что для таких нужд используют именно их. Его и заказали вместе с фалом.
Гелий
Остановлюсь только на факте, что количество гелия (как минимум которое надо купить), придется посчитать для своего объема шара. Вы без проблем вспомните эти школьные формулы или найдете онлайн калькулятор. Но, для истории, приведу их и тут.
Количество стандартных баллонов по 40л которое нам понадобится мы считали так (к сожалению не нашел у пикабу возможности по-человечески использовать формулы, так что только так):
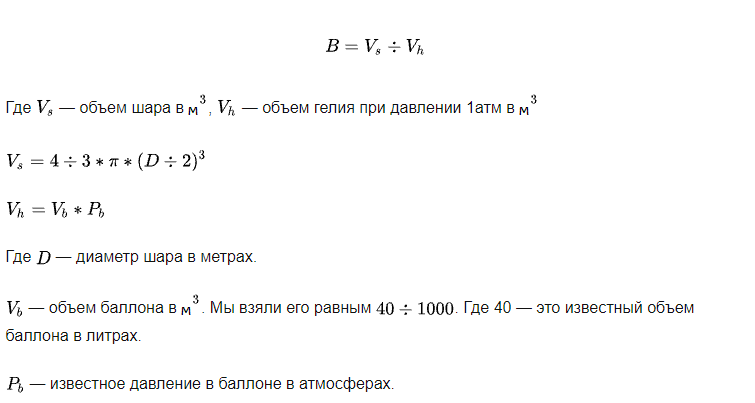
В нашем случае, необходимое количество баллонов по 40л получилось равным 1.36 баллона.
Фух, надеюсь ничего не напутал пока переносил формулы из Excel.
RPI Sense Hat
Для любителей RPI это довольно известная вещь. Вкратце поясню — это сенсорный мультитул для RPI. Имеет на борту следующее:
- Датчик температуры (2 штуки)
- Датчик давления
- Датчик влажности
- Гироскоп
- Магнетометр
- Компас
- Акселерометр
- LED дисплей
То, что надо, в одном флаконе.
LTE GPS HAT — LTE / GPRS / GPS SIM7600E-H — for Raspberry — Waveshare 14952
Еще одна спорная штука. Нет, вне сомнения, та часть функциональности, которую мы использовали нам очень нужна и она работает отлично. Но, возможно, это overkill и можно найти вариант подешевле.
А использовали мы ее только для показаний GPS (даже без GSM). Дело в том, что трекер то у нас есть (поисковый, не подключается к RPI), но хотелось бы еще к чему-то привязать телеметрию. И, желательно, привязать ее к координатам и времени. Из-за этого и появился еще 1 трекер, но уже подключенный к RPI. Показания с него (координаты, время, курс, скорость, высота) пишутся в лог и служат точкой синхронизации с показаниями всех сенсоров.
Его достоинство — он имеет выносную антенну. А это очень важно, когда на борту 2 приемника GPS и 1 передатчик (поисковый трекер). Производители Spot Trace советуют размещать их трекер на расстоянии не меньше 30см от других GPS устройств, во избежание помех. Так что тут пригодилась выносная антенна, которую мы просто кинули за борт.
Его недостаток — документация в лучших китайских традициях. Ее сначала пришлось поискать, а потом еще и нехило так покурить (но, в целом, она весьма исчерпывающая и понятная). Чтобы облегчить поиск будущим начинателям этой борьбы, оставлю ссылки тут (на одном из файлов стоит гриф COMFIDENTIAL (орфография сохранена), лол): раз, два.
TEMPer Gold USB Temperature Sensor
Внешний градусник (для замера температуры внутри использовали Sense Hat).
Его достоинства: он подключается в порт USB, есть рабочий тулсет для проверки (под Win)
Его недостатки: нижний предел измерения -40С. Сразу скажу — этого оказалось маловато; второй недостаток — документация. Ее нет. Пришлось реанимировать проекты 5-летней давности под похожие модели и написанные на разных языках. В итоге поскрещивал ежа с ужом и немного поколдовал (тяжела и неказиста жизнь простого программиста). Но, в итоге, все работает надежно, как швейцарские часы. В разделе с кодом я поясню где был тонкий момент.
RPI Tall Case
Это крутая штука, которая доставляет мне эстетическое удовольствие.
Красивый, алюминиевый, высокий кейс для RPI 4. Разумеется, перед заказом и прикинул высоту RPI с обеими шапками (Sense + GPS) — чуть-чуть не влезает при плотно закрытой крышке. Но, используя spacers (извините, не знаю русского названия), можно приподнять верхнюю крышку немного, для вентиляции.
Из проблем с ним было только одно — один из разъемов GPS HAT сильно выпирал за границы платы и не влезал в кейс. Разъем пришлось нежно демонтировать кусачками.
Ну только посмотрите, как элитно стал выглядеть наш самописец:

RPI Mounting Kit
Просто наборчик тех самых spacers и прочих мелочей. Приятное дополнение.
Конструкция
Общая конструкция
Для начала рассмотрим общую конструкцию аппарата (масштаб не соблюден!):
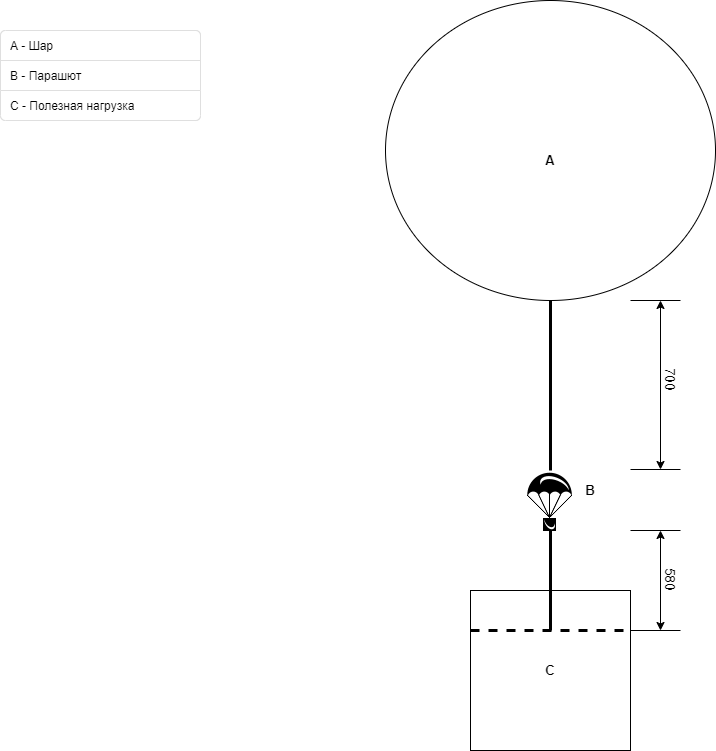
Как вы понимаете, стратосферный зонд это, по факту, шарик (в нашем случае диаметром 2.5м) с полезной нагрузкой на веревке и парашютом. Парашют крепится к нагрузке с помощью вентиляционных отверстий фалом 580мм (подробней в схеме полезной нагрузки). Ну а шар к куполу парашюта, тоже фалом (700мм).
Принцип работы прост: с набором высоты атмосферное давление падает и гелий внутри шара начинает этот шар раздувать. В конце концов, шар не выдержит растяжения и лопнет. Нагрузка начинает падать и от набегающего потока воздуха раскрывается парашют. На парашюте нагрузка плавненько опускается на землю.
Полезная нагрузка
Конструкция короба для полезной нагрузки вызывала у меня немного больше переживаний. Требовалось соблюсти несколько очень важных условий:
1. Предельная масса не более 2.5кг (для нашего объема шара)
2. Защита от воды + плавучесть (облака, дождь, падение в озеро и т.п.)
3. Хорошая терморегуляция (RPI не должна перегреться, а аккумуляторы не должны замерзнуть)
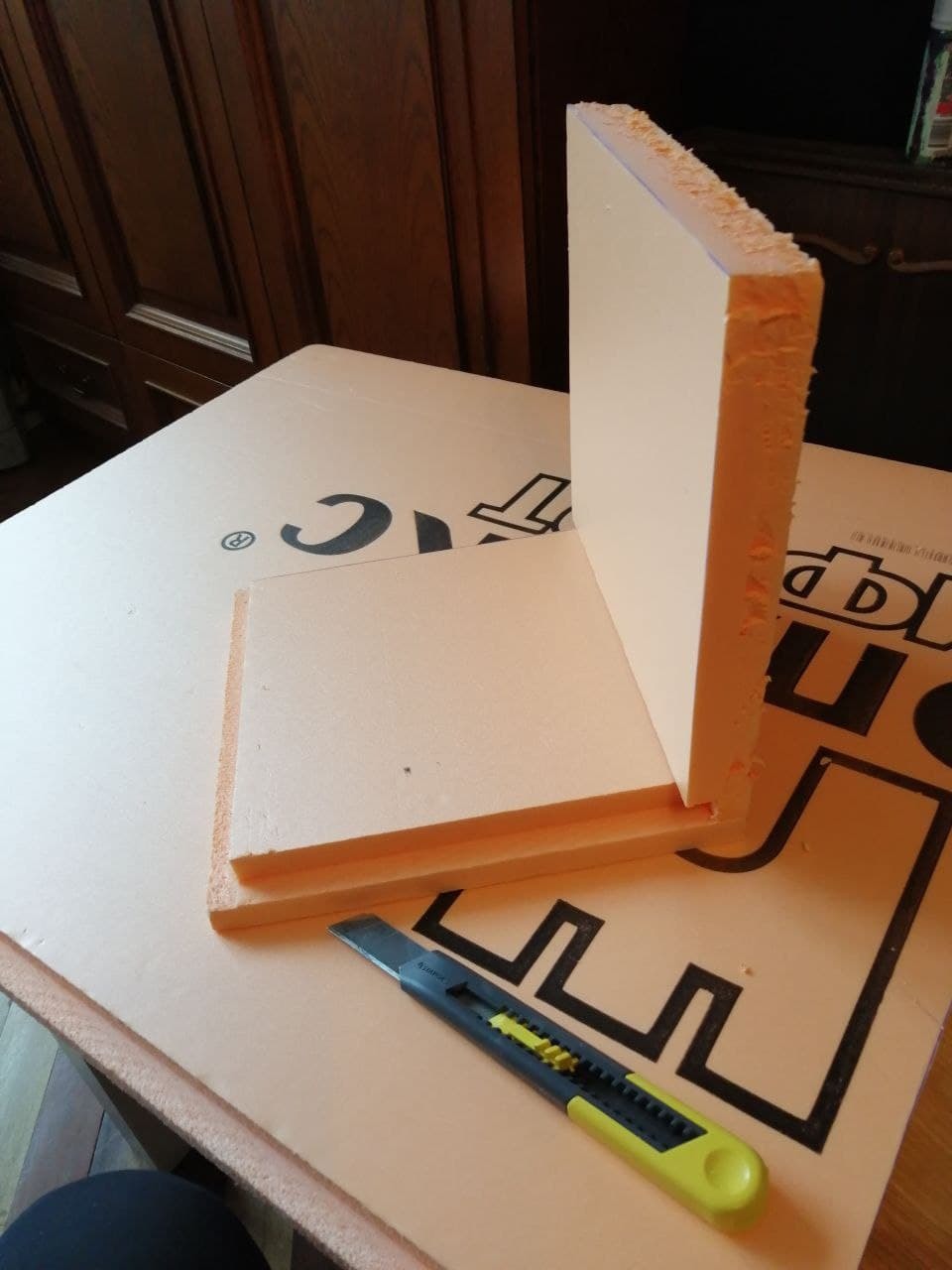
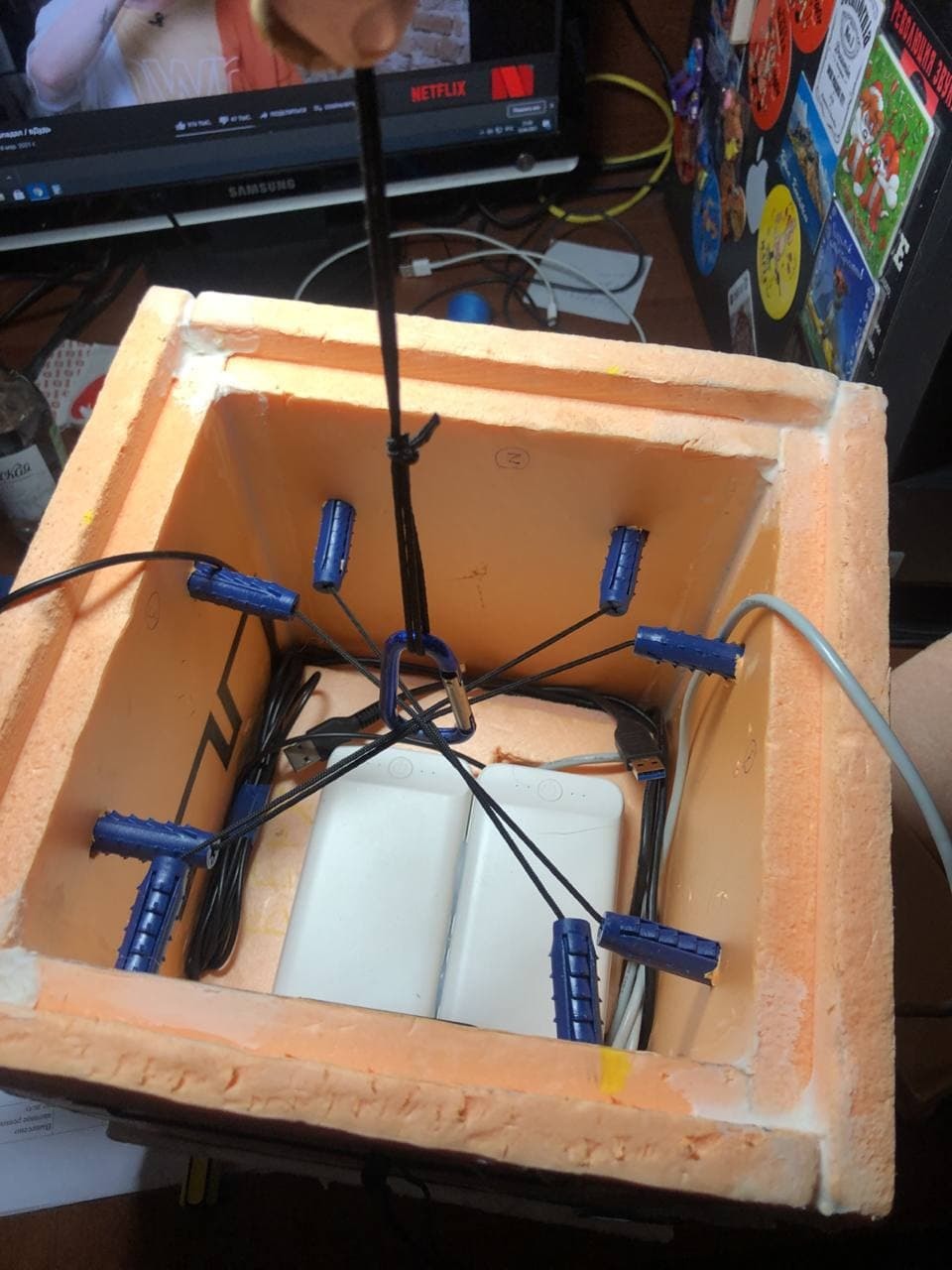
Посовещавшись с нашим конструкторским бюро, было решено делать куб со стороной 250мм из экструдированного пенополистирола (куплен в строительном магазине листами). Верхняя крышка двустворчатая из того же материала. В боковой стенке вырезано отверстие под объектив GoPro. Он легкий, имеет положительную плавучесть, достаточно прочный и не пропускает воду (швы, разумеется, проклеили):

Теперь рассмотрим компоновку компонентов. Как я сказал, тут главная проблема — терморегуляция. Честно говоря — я не инженер (хотя в дипломе такое слово написано). Так что за правильность решения не ручаюсь, но общими усилиями мы родили такую идею:
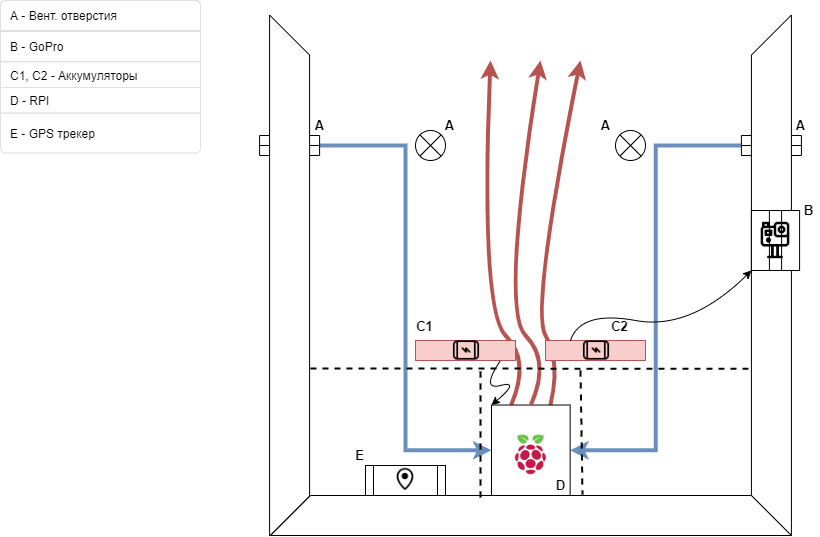
Обратите внимание, что это схема без развесовки. Сбалансируйте компоненты так, чтобы короб не перекашивало в подвешенном состоянии. Мы это делали методом проб и ошибок.
RPI располагается внизу. Забортный воздух поступает через вент. отверстия (дюбели, 8 штук) в короб и опускается к RPI. RPI выделяет тепло в процессе своей работы и нагретый воздух поднимается вверх. Тем самым подогревая аккумуляторы, расположенные над RPI. GPS трекер имеет собственное питание и довольно неприхотлив к внешним условиям (водонепроницаем, ударопрочен, низкое энергопотребление), так что за него голова не болела. До кучи, мы еще загерметизировали соединения с камерой и внешним градусником (обычным клеем залили), т.к. ожидали образование конденсата.

Вент. отверстия также используются для крепления фала от парашюта:

Конфигурация Raspberry PI 4B
Сам по себе не представляет никаких проблем, все очень просто и понятно. Это мини-компьютер с портами ввода-вывода к которым мы, в дальнейшем, планируем подключать все наши датчики\сенсоры\велотренажеры.
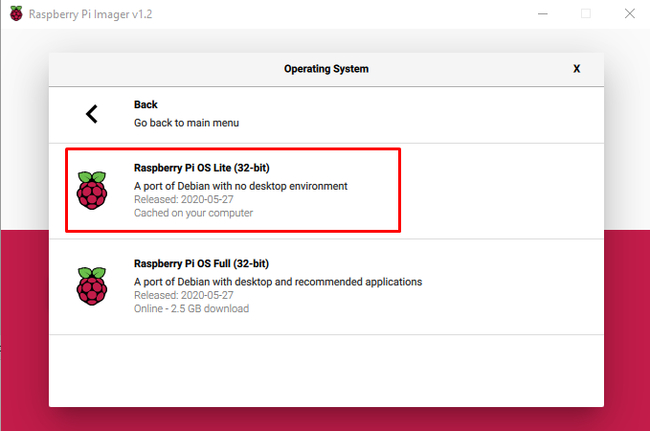
Скачать Raspberry PI Imager, выбрать нужную OS, свою SD карту и нажать WRITE:

OS было решено взять максимально облегченную. Десктоп и рюшечки нам не нужны, только консоль, только хардкор. Выбор пал на Raspberry PI OS Lite 32-bit:
SD карта для Raspberry PI
Хоть в официальной документации толком и не указан максимально допустимый объем карты памяти с которой RPI сможет загрузиться (но указан минимальный — 16GB и, как-то намеками указана возможность загрузки с 256GB с определенного дистрибутива), быстрый гугл показал, что лучше взять 32GB. На этом и остановились. Класс карты не сильно критичен, но разница в цене между Class 4 и Class 10 мне показалась не критичной, так что почему бы не взять ту, что побыстрее? Тем более что это, в дальнейшем, открывает возможность скидывать поток видео с GoPro на карту. Но до этой реализации мы не дошли и, честно говоря, я пока не придумал зачем это надо. Карту взяли SanDisk Extreme 32GB типа такой
Подключаем RPI к компу
После того как OS записана на карту и карта вставлена в слот на RPI, можно включить RPI просто подав на него питание. Питается это чудо через порт USB-C, так что озаботьтесь проводом заранее (я использовал 1 из павербанков).
Тут у нас первая проблема: ну включили, лампочки замигали, вроде все ОК.
И что?
Да, операционку то мы поставили без десктопной оболочки, да и мониторы с клавиатурами мы подключать не планировали, и Wi-Fi там еще не настроен.
Так что я немного присел на стул на полчаса.
(╯°□°)╯︵ ┻━┻
Честно говоря, бежать в магазин за проводом\переходником mini HDMI у меня не было никакого желания. Снова запускаем гугол и видим, что ситуация не безвыходная: можно подключить RPI к компу через USB и через него же наладить SSH. И, хотя тот же гугол говорит обратное, RPI при этом будет и питаться от компа и эмулировать сетевое соединение через один и тот же USB кабель. Нуштош, вытыкаем наш кабель из павербанка и подключаем его в USB компа. Снова замигали лампочки, RPI загрузился и, судя по статусу лампочек — у него все отлично.
Но по SSH все еще не подключиться. Курим вот эту страницу. Нас интересует headless mode:
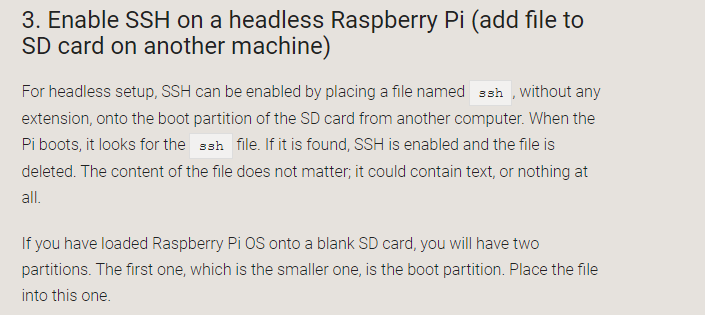
Ага, надо поместить пустой файл с именем ssh в корень SD карты. Извлекаем карту из RPI и вставляем ее в комп (предварительно обесточив устройство). Делаем. Пробуем снова. Hostname, User, Password указаны там же, в подразделах для каждой OS. Но, честно говоря, информация там немного устаревшая. Например для Win10 указано, что надо использовать IP вместо имени хоста. Это не так. Забегая вперед, скажу, что и hostname: raspberrypi.local тоже заработал без приключений.
Интернеты пишут, что для этого необходимо поставить доп. приблуды от Apple, чуть ли не iTunes. Либо опенсорс аналог драйвера для таких доменных имен. Но, как я уже сказал, у меня все заработало и без вот этих вот дел. На всякий случай, вот подробная статья
Итого. Что мы имеем по подключению по SSH:
Hostname: raspberrypi.local
User: pi
Password: raspberry
Пробуем… не работает. К сожалению у меня не сохранились все скрины этих приключений, ну да ладно, придется поверить мне на слово — не работает.
(╯°□°)╯︵ ┻━┻
Переходим на нижние интернеты… Оказывается, мы забыли включить режим Lan Over Usb про который я что-то не нашел упоминания в документации (в итоге на офф форумах это им припоминали). Искомая статья (может не именно она, но шаги в ней описаны верные) — тут
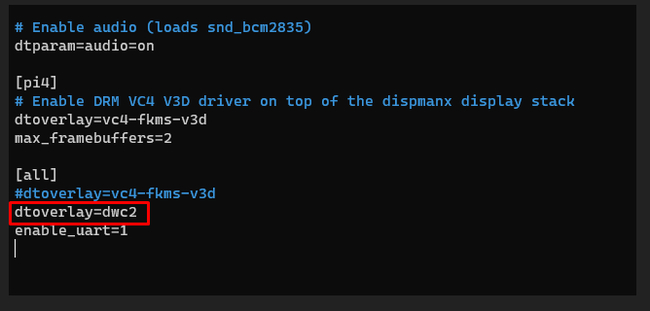
Итак, если вкратце, нам нужно будет поменять 2 файла на SD карте: config.txt && cmdline.txt (могут быть без расширений, я уже не помню). Вынимаем карту из RPI, подключаем к компу, находим первый файл и добавляем в конце строчку dtoverlay=dwc2:
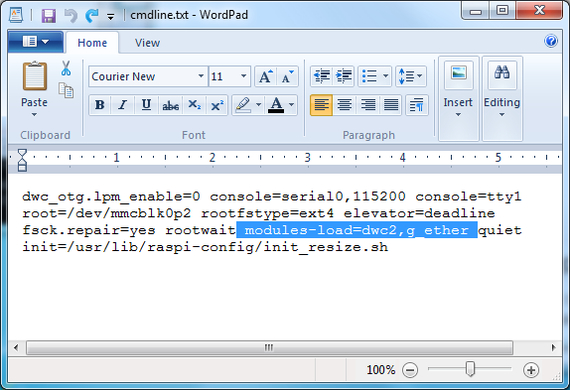
Теперь ищем второй файл (cmdline.txt).
По поводу второго файла небольшое отступление — мне его менять не пришлось — и так все было как надо. Но мало ли ¯\_(ツ)/¯
Добавляем в него строчку, указывающую на необходимость загрузки нужного модуля ядра (все параметры идут через пробел в одну строчку, это важно!). Скрин из статьи:
Всё, файлы сохранили, карту вставили обратно в RPI, подключаем USB кабель в комп и в порт питания RPI, RPI загружается. Пробуем SSH:
> ssh pi@rasberrypi.local
(да, кстати, озаботьтесь наличием SSH клиента на рабочем компе, если вдруг у вас его еще нет)
На этот раз все должно пройти как по маслу (извините, этого скрина тоже не сохранилось). Мы попадем в bash консоль на нашей Raspberry PI 4B по USB и теперь можем наворотить там дел ;-) А первое дело будет — обеспечить себе максимально удобные условия работы, иначе говоря — Wi-Fi!
Включаем Wi-Fi на RPI
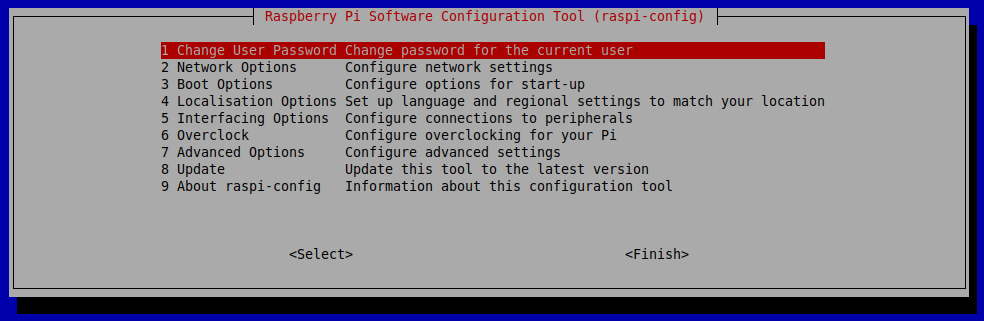
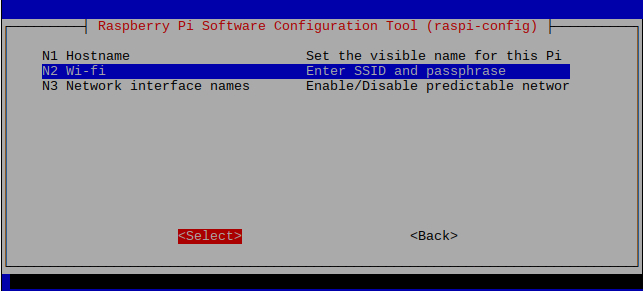
Тут совсем все просто и без неожиданностей. В RPI OS входит утилита конфигурации через которую можно сделать все (или почти все) что может понадобиться в дальнейшем. Называется она raspi-config и ее использование, в частности в контексте настройки вафли неплохо описано в официальной документации — тут.
Подключаемся по кабелю в SSH сессию нашего черного ящика, запускаем из консоли:
> sudo raspi-config
Всего несколько клацаний кнопками и можно отсоединять наш USB кабель от компа и подключать его к павербанку (картинки из интернета):
Ну что, теперь это гораздо больше похоже на независимый бортовой самописец для стратостата, хоть он пока ничего и не самопишет.
Для удобства также советую добавить SSH ключи. Надеюсь не надо объяснять как это делать, но если вдруг, то вот отличный тутор от DigitalOcean
Сборка .NET Core проекта под RPI
Небольшое отступление: вся возня с RPI, периферией и написание софта делалось почти год назад. Много информации с тех пор утекло из моей головы и сейчас я эту часть пытаюсь восстанавливать по памяти. К сожалению, восстановить 100% этого приключения у меня не получится, но общие моменты я обозначу.
Настало время что-нибудь напрограммировать для нашего самописца. Сейчас, прочитав этот подзаголовок, многие могут подумать:
А почему не питон??
Ну… по нескольким причинам. Во-первых: хваленое комьюнити, которое "уже все давно написало, просто подключай и поехали", оказывается не всё написало, а то, что написало, мягко скажем — не едет (об этом в разделе про внешний градусник). А во-вторых: что-бы я не начинал писать — все равно получается C#.
Так что стереотипы прочь — будем ваять простенький скрипт на шарпе (зря нам что ли кроссплатформу завозили)! Я буду показывать всё на примере своего проекта для логирования всех показателей. Кто захочет — может использовать свой "hello world", кто не захочет — вот исходники на гитхабе
Бытует мнение, что для того, чтобы завести что-то на dotnet, надо для начала этот самый dotnet установить. На самом деле это не так. Dotnet умеет паковать свой CLR в приложение для целевой платформы. Для этого у dotnet cli есть флаг --self-contained. Так же нам потребуется указать какой конкретно рантайм мы будем использовать при помощи параметра -r linux-arm. Ну и фреймворк укажем, чего уж там. Итого полная команда для сборки самодостаточного dotnet приложения (не требующего установки dotnet runtime на целевую машину) будет выглядеть так:
> dotnet publish RpiProbeLogger\RpiProbeLogger.csproj --self-contained -r linux-arm -f netcoreapp3.1 -c Release
На выходе у нас получится исполняемый файл под linux arm со всеми зависимостями. Нам останется только скопировать все содержимое директории на Raspberry по SSH, сделать файл исполняемым (не обязательно) и, собственно, запустить (подробнее в разделе про CI/CD):
> chmod +x /home/pi/RpiProbeLogger/RpiProbeLogger
> ./home/pi/RpiProbeLogger/RpiProbeLogger
Если кто-то крутит носом от self-contained приложений — ничего страшного, вариант с установкой рантайма и фреймворка (ну мало ли кто-то захочет еще и билдить на распберри) на RPI тоже допустим и прекрасно работает — проверено! Вот статья которую я лично использовал (в ходе экспериментов).
CI/CD для Raspberry
Немного громкое название, но смысл тот-же — приложения мы писать умеем, надо теперь их собирать под целевую платформу и как-то их туда доставлять. Тут нам поможет его величество PowerShell (linux-like товарищи легко заменят его на bash, sh, etc по вкусу. Это не принципиально).
Весь скрипт находится в корне репозитория и называется buildAndDeploy.ps1. Общий алгоритм такой:
1. Подключиться к RPI по SSH для выполнения команд
2. Установить SFTP сессию для работы с файлами
3. Собрать наше приложение
4. Скопировать билд на RPI
5. Установить и включить сервис нашего приложения (чтобы запускался автоматически при загрузке RPI)
SSH
Поехали по очереди: с SSH/SFTP нам сильно поможет модуль для Powershell — Posh-SSH. На мой взгляд с этим модулем все хорошо, кроме одного — почему-то документацию по нему приходится искать по всему интернету и собирать по крупинкам. Может автор посчитал, что его API и ежу понятно, но вот мне было не очень понятно. Примеры использования с описаниями нашлись тут. Нас же сейчас интересует установка SSH сессии и делается она вот так:
$sshSession = New-SSHSession -Computer raspberrypi.local -Credential $credentials -KeyFile $rsaKeyFile
Сама сессия сохраняется в переменную $sshSession. Обратите внимание на 2 переменные: $credentials и $rsaKeyFile: мы же не хотим использовать привет из 90-х пароли? Мы будем использовать RSA ключи! И как это делать в случае Posh-SSH мне пришлось поискать. Сначала объясню немного про креденшиалс — в Powershell есть такой командлет Get-Credential — он занимается тем, что нативными средствами запрашивает пару логин-пароль у пользователя и возвращает их в качестве объекта:
$credentials = (Get-Credential pi)
В Win10 это выглядит так:
Как вы уже догадались, первым параметром можно сделать пре-ввод логина — pi. Нам это подходит. Теперь тонкий момент про Posh-SSH: он имеет параметр -KeyFile куда передается путь до приватного SSH ключа. НО! Приватный ключ может иметь passphrase — а такого параметра Posh-SSH не имеет. Оказывается, и это пришлось поискать, Posh-SSH будет в качестве passphrase использовать пароль из объекта $credentials — и это не слишком очевидное поведение, но именно из-за этого и затевалось использование Get-Credential. Что ж, этого вполне достаточно, чтобы подключиться по SSH к RPI. Полный скрипт находится в репозитории, а мы двигаемся дальше.
SFTP
Никаких откровений тут не скрыто, тот же Posh-SSH, те же Credentials, немного другое имя команды:
> $sftpSession = New-SFTPSession -Computer raspberrypi.local -Credential $credentials -KeyFile $rsaKeyFile
Сразу укажу команду для копирования файлов (да, всего в одну строчку деплоим, без хитростей):
> Set-SFTPFolder -SFTPSession $sftpSession -RemotePath '/home/pi/RpiProbeLogger' -LocalFolder "RpiProbeLogger\bin\$($c)\netcoreapp3.1\linux-arm\publish" -Overwrite
Да, называется она Set-SFTPFolder, не спрашивайте почему — я не знаю. Можно догадаться, что копирует она содержимое исходной директории в целевую директорию, а параметр -Overwrite указывает что содержимое целевой директории будет перезаписано в случае совпадения имен файлов. Параметры -RemotePath и -LocalFolder ясны без пояснений. Единственное, что может привлечь внимание — $($c) — это передача параметра командной строки, который содержит тип сборки: Release или Debug. Он также используется в следующем пункте — сборке приложения.
Сборка
Итак, как уже было описано в разделе про сборку .net под arm — наша команда сборки будет выглядеть следующим образом:
> dotnet publish RpiProbeLogger\RpiProbeLogger.csproj --self-contained -r linux-arm -f netcoreapp3.1 -c $c
Единственная разница тут — это параметр $c который мы будем подставлять из параметров командной строки (Release, Debug, etc) — на самом деле можно и не параметризовывать это, а захардкодить "Release" — на любителя.
Включение\запуск сервисов
Все тот же Posh-SSH имеет еще одну полезную команду: Invoke-SSHCommand. С помощью нее мы выполним установку systemctl сервиса. Unix-like ребятам тут делать нечего, для остальных немного пролью свет что это.
systemctl — это системная служба для управления службами (да-да). Она запускается автоматически и запускает, останавливает, управляет пользовательскими службами, основываясь на специальных файлах — .service. Такой файл присутствует и у меня в репозитории в подпапке с проектом — probelogger.service и вот его содержимое:
[Unit]Я не буду врать, говоря что мне тут понятно абсолютно все, но, в основном, это читается как-то так:
Description=Probe Logger Service
[Service]
User=root
WorkingDirectory=/home/pi
ExecStart=/home/pi/RpiProbeLogger/RpiProbeLogger
ExecReload=/bin/kill -HUP $MAINPID
KillMode=process
Restart=on-failure
Type=exec
StandardOutput=syslog
StandardError=syslog
SyslogIdentifier=RpiProbeLogger
[Install]
WantedBy=multi-user.target
1. запускать службу от пользователя root (да, секурность — не секурность, я понимаю. но рут привелегии потребовались для чтения данных с порта USB. Об этом позже)
2. рабочая директория — такая-то
3. запускать — тот-то файл
4. для перезапуска сервиса в случае катастрофы использовать команду kill
5.перезапускать в случае падения
6. логи сохранять в syslog
Далее пара команд Posh-SSH. Включение сервиса (означает что он будет запускаться автоматически при запуске RPI):
> Invoke-SSHCommand -Command 'sudo systemctl enable /home/pi/RpiProbeLogger/probelogger.service' -SSHSession $sshSession
Немедленный запуск сервиса (не обязательно же перезапускать RPI для нашего логгера, мы же не драйвера пишем):
> Invoke-SSHCommand -Command 'sudo systemctl start probelogger.service' -SSHSession $sshSession
Переменная $sshSession нам знакома из раздела про SSH сессию — это именно та самая сессия. Файл probelogger.service — в репозитории.
Что ж, на этом пожалуй все, что касается билда и доставки нашего самописца на RPI. Напоминаю, весь powershell-скрипт — в корне репозитория (buildAndDeploy.ps1). Не совсем автоматизировано — запускать нужно ручками, но вполне себе "continuous" — билди хоть после каждого коммита. Можно было бы конечно поднять pipeline на основе этого на каком-нибудь Azure DevOps или кто что любит (благо выбор сейчас из десятка платформ присутствует), но я посчитал это оверкилом для таких задач. Побилдим руками, не сломаемся.
Команда билда и деплоя выглядит вот так:
> .\buildAndDeploy.ps1 -enableService -runService
По умолчанию билдится Debug версия (нам же для разработки и отладки надо). Можно добавить параметр -c=Release если необходимо собрать финальную версию.
Отладка в Visual Studio
Это та часть, где время стерло бОльшую часть информации. Но поверьте — тут все просто и прозрачно, а на MSDN есть даже статья по отладке кода на RPI для VSCode и Visual Studio — VS Remote Debug.
Я опишу буквально в 2-х словах для своего случая (Visual Studio):
1. Открываем окно удаленного дебага: Debug -> Attach to Process
2. Выбираем Connection Type: SSH
3. Вбиваем в поле Connection Target наш pi@rasberrypi.local
4. Ищем в списке наш процесс dotnet (иногда может потребоваться включить Show processes from all users, зависит от вашей конфигурации)
5. Жмем Attach и мы в деле!
Breakpoints, Watches, Locals, Immediate Window, Threads — все работает.
Нуштош... На этом моменте пикабу сказал мне, что длина текста превышена, так что закругляемся. Если эта тема зайдет - я продолжу переносить эту историю сюда.
Fly safe, cmdr!






