

Самодельный стратостат. Часть 1б

Продолжаем продолжать
Вторая подчасть первой части "инструкции" по сборке своего стратостата из мангала и детских травм. Она будет немного скучновата, но без нее у вас ничего не полетит. Так что давайте перетерпим эту часть и дальше будет веселее :-)
Мы закончили на описании отладки dotnet приложения на RPI. Теперь давайте немного осмотрим сам код.
Программирование
Сразу ссылка на репозиторий с исходниками — GitHub
Я очень долго откладывал этот раздел для написания, т.к. софт был написан год назад и я почти забыл все те ужасы, которые мне пришлось побороть, сражаясь с китайскими комплектующими. Но попробуем хоть что-то наковырять. Сейчас я лишь заменил project reference на nuget package, т.к. зачем-то я скачивал исходники проекта нугет пакета (надеюсь просто так, сейчас солюшен билдится).
Как и в системе "театр-вешалка", dotnet приложение начинается с конфигурации. Конфигурации DI, логгеров и вот этого всего. В нашем случае в функции Main:
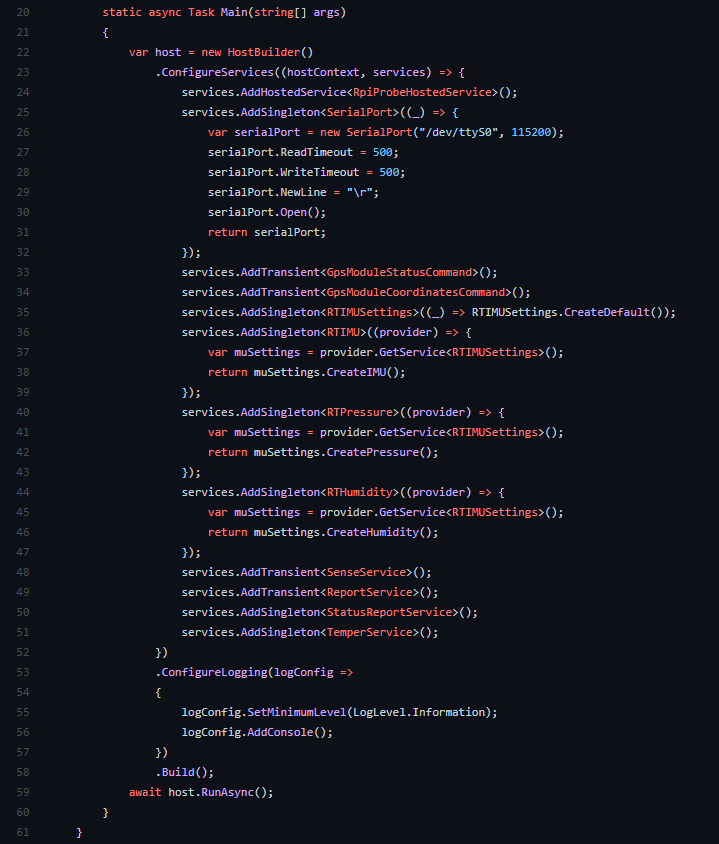
Как видите, мы пошли путем использования IHostedService как основной крутилки нашего логгера, настроили SerialPort для доступа к GPS HAT (зачем-то я его инжектю в hosted service, вместо того чтобы использовать там GpsModuleCommand, очевидно проглядел тогда), добавили наши сервисы для доступа к SenseHat в контейнер DI и настроили логирование в консоль. Тут все — host.RunAsync()!
Не буду приводить тут содержимое каждого файла, кому надо — посмотрят на гитхабе. Тут обрисую основную идею. Вся она описана в нашем хостед сервисе RpiProbeHostedService. Содержммое метода StartAsync:
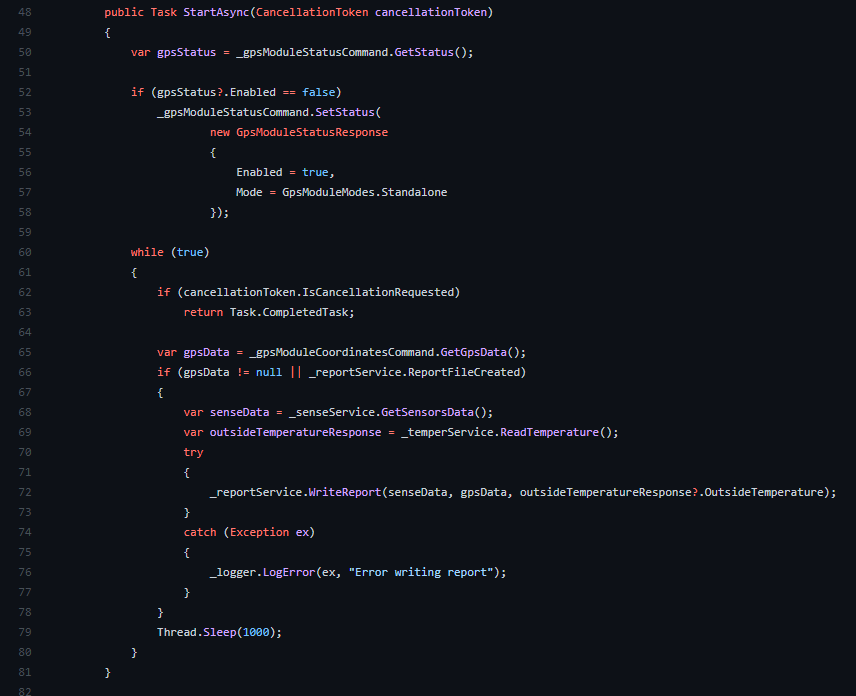
Итак, для начала нам нужно узнать в каком состоянии наш GPS HAT. Т.к. тот факт, что он включен — еще не означает, что включен непосредственно GPS модуль. Если GPS выключен — включаем его и идем дальше.
А дальше у нас бесконечный цикл с задержкой в 1с. В первую очередь нам нужны показания GPS — так как это есть точка синхронизации всех данных. Так же, дата из этих показаний используется как имя файла-репорта. Так что нам эти данные прям очень нужны.
Затем собираем данные с SenseHat и внешнего градусника и записываем это все в файл-репорт. Вот и вся нехитрая логика.
С SenseHat проблем не было вообще никаких. А сейчас, при написании статьи, оказалось что с тех пор MS даже добавила его поддержку в свою iot library. Тут подробнее — MSDN.
Проблемы, как вы догадались, были с внешним градусником. Я перепробовал с десяток разных проектов на разных языках (Python в их числе). Но ни один не заработал именно с этим градусником. Пару раз было очень близко, но видимо моя модель чуть-чуть отличалась и показания отрицательных температур были неверны. Это сейчас, с остывшей головой, я понимаю — если проблема в месте, где присутствует минус — надо смотреть на тип данных. И таки да, замена byte на sbyte сделала свое дело. Но тогда, год назад, я был на грани отчаяния. Метод ReadTemperature:
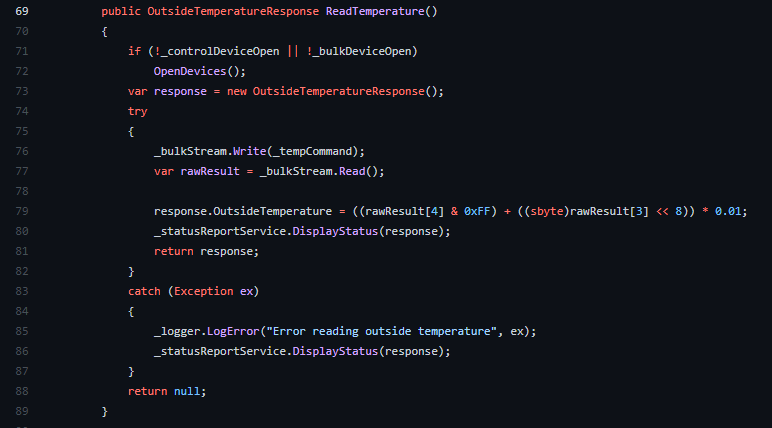
Метод хоть и небольшой, но содержит парочку magic numbers. Знаете, где вы найдете их объяснение? Нигде. Это все наковыряно и проверено (методом проб и ошибок) из разных проектов. Так что если у вас такой градусник — поздравляю, ваши страдания окончены.
Не стоит забывать, что наш самописец не подключен к монитору и нам надо бы как-то понимать — все ли на нем работает штатно. Для этих целей я использовал LED матрицу на SenseHat. Она небольшая, всего 8x8, так что выводить туда картинки не получится. Но получится мигать/светить лампочками. Более чем достаточно в столь аскетичном устройстве. Код метода DisplayStatus:
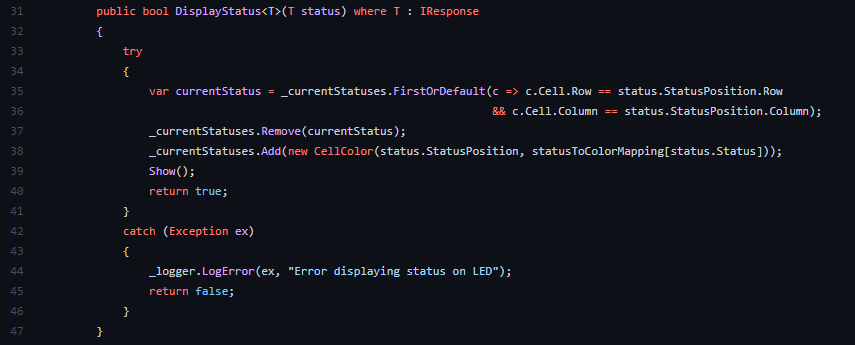
Видим, что я инкапсулировал координаты лампочки, которой надо посветить, в класс ответа от конкретной функции (GPS ответ, Sense ответ, ответ от внешнего градусника и т.п.). Все эти response реализуют интерфейс IResponse:
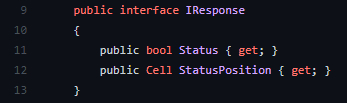
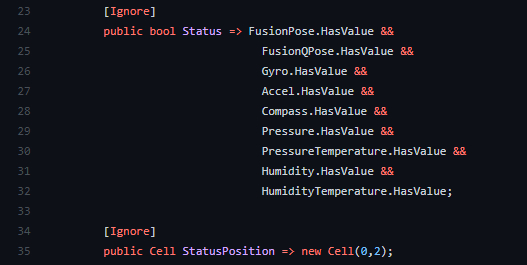
Соответственно, обязаны предоставлять статус в формате "Успех\провал" и координаты ячейки LED куда его поместить, и делают это на свое усмотрение. Не буду говорить что это идеальный дизайн, но, как минимум год назад, мне он показался подходящим. Вот, например, как реализует свой статус ответ от SenseHat:
Итого у нас есть 5 подсистем:
1. GPS модуль: вкл\выкл
2. GPS модуль: координаты получены и прочитаны
3. SenseHat
4. Внешний градусник: показания есть\нет
5. Лог-файл: координаты имеются\нет
Таким образом, маркером того, что мы готовы к запуску, будет служить 5 зеленых индикаторов на матрице.
GPS HAT тоже не вызвал особых проблем, насколько я помню. За исключением новости (для меня), что для работы с SerialPort нужны привелегии root и его ответ пришлось немного попарсить:
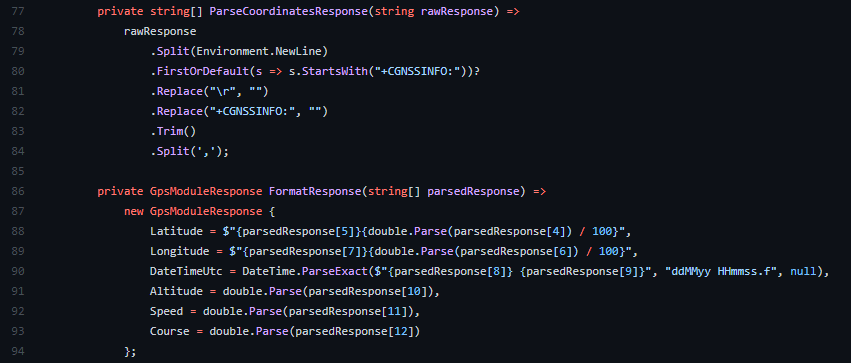
Положение всех компонентов ответа указано в документации.
Еще 1 момент — EventBased подход я решил не использовать, но он вроде работает и методы для него (DataReceived) остались в коде. Честно говоря, не помню почему я так решил, но думаю причины были.
Перейдем к финансам.
Бухгалтерия
Быстренько пробежимся по моей нелюбимой части — сколько все это чудо стоит. В этот манускрипт не попали: стоимость камеры (она у меня уже на тот момент и так была), стоимость спасения и всякая мелочевка, типа клея и винтиков. Эти позиции сильно субъективны.
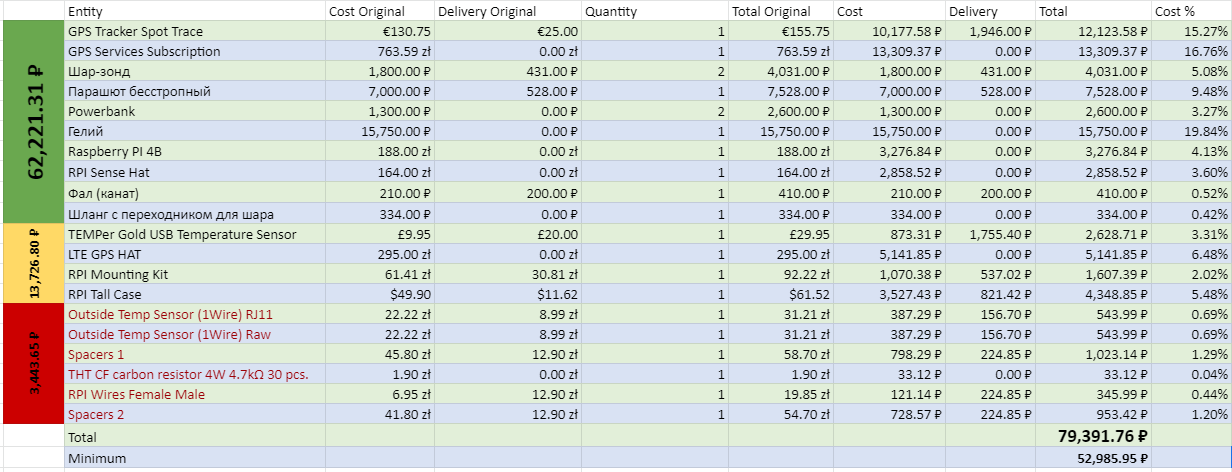
Внизу 2 суммы: одна за все позиции, вторая (Minimum) — это только если запускать одну камеру — без RPI и всего с ней связанного. Как видите, поисковый трекер вместе с подпиской занимают ~30% цены всего аппарата. Так что если найдете вариант подешевле — это хороший повод сэкономить.
Также, в процессе моих экспериментов, я накупил много лишнего — это красная секция в табличке. Это то, что совсем не пригодилось. Желтая секция — это то, без чего можно было бы обойтись. Эдакая ни вам, ни нам середина. Запуск только лишь зеленой секции означает запуск только камеры и RPI с Sense Hat. Мы запускали зеленую + желтую.
Конечно тут есть простор для оптимизации. Например, я считаю, что вместо GPS HAT можно было бы найти что-то подешевле, за парашют мы тоже явно переплатили, карту памяти для RPI можно смело брать 16Гб (а то и меньше), ну и так далее. Но это все было в первый раз, хотелось подстраховаться — отсюда и цена соответствующая.
Подготовка к запуску
Прежде всего надо понять — где запускать? Если вы житель мегаполиса, у меня для вас плохие новости — нигде. Ладно шучу, не все так плохо =)
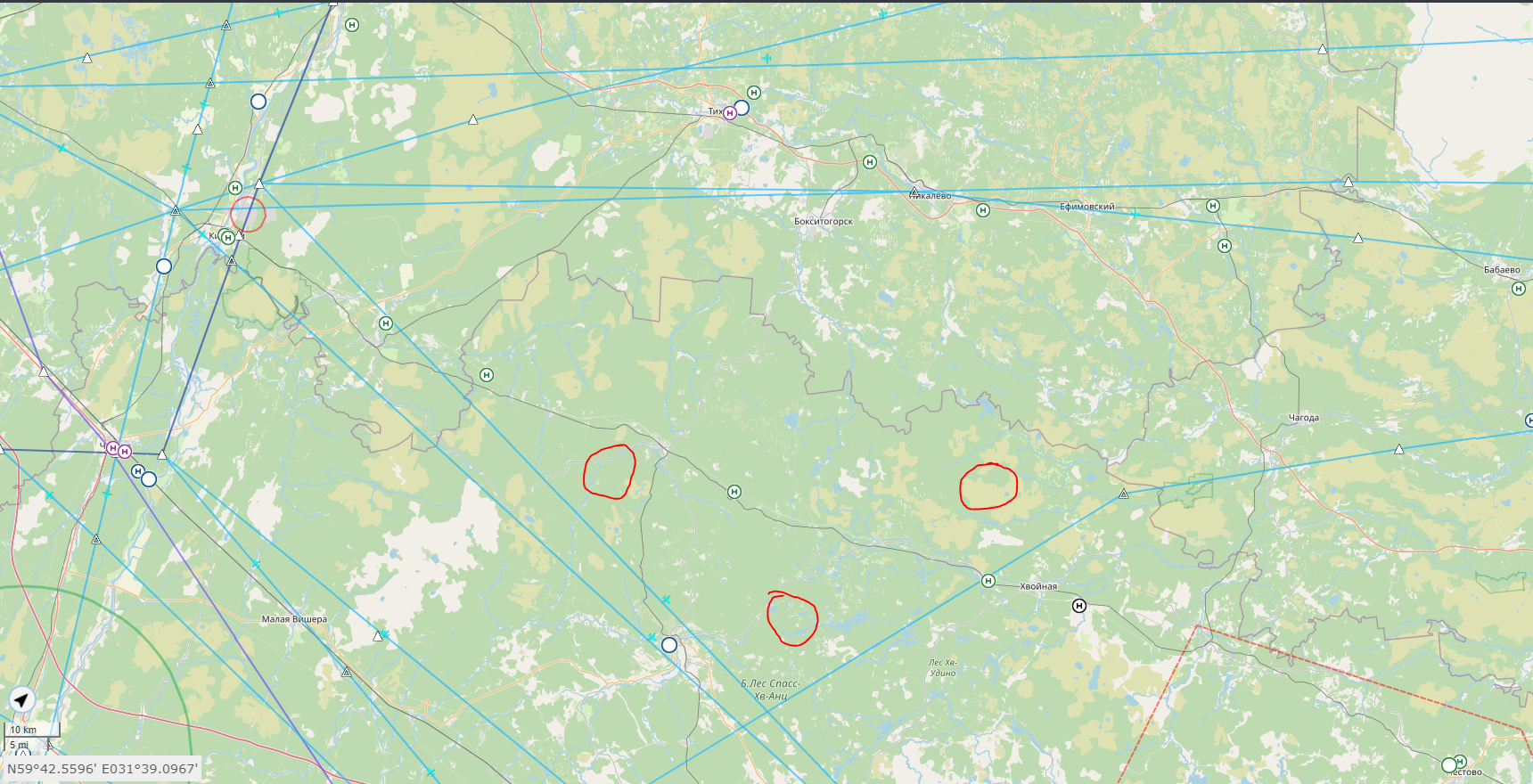
Главное — надо никому не мешать. Рядом не должно быть ни воздушных трасс, ни аэродромов, ни запретных или бесполетных зон. Выбирать место надо с учетом предполагаемой траектории движения (которая зависит от ветра и вертикальной скорости аппарата).
Для этого можно воспользоваться сервисом FPLN: включаем в настройках показ всего что нам нужно и ищем глазами свободное место. Вот чисто для примера такое (в зависимости от предполагаемой траектории):
Откуда нам взять предполагаемую траекторию? Тоже есть сервис. CUSF Landing Predictor 2.5. Вбиваем наши варианты и параметры и смотрим что будет:
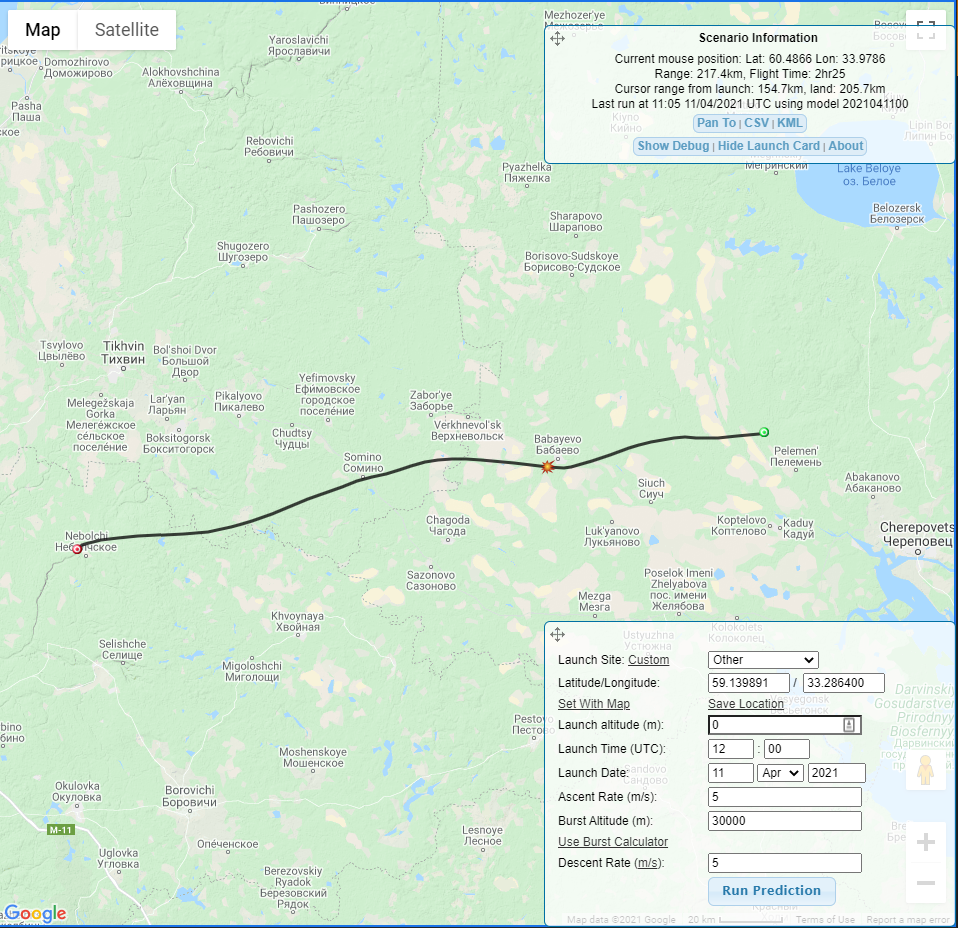
Совмещаем картинку с FPLN и смотрим — подходит/не подходит? Если нет — ищем новое место, если да — поздравляю.
Для прогнозирования ветра можно использовать Windy. CUSF Landing Predictor так же учитывает направление и силу ветра на выбранное время и координаты. Как вспомогательное средство, можно использовать FlightRadar чтобы помониторить в реальном времени самолеты в предполагаемом районе запуска.
Ну что. Если вы дошли до этого этапа, значит бОльшая часть пути позади. Впереди запуск!
Запуск
Со слов участников: Выбрали точку, заправили тарантас, взяли пару баллонов гелия и двинули на место. Описывать тут особо нечего. Имейте только ввиду — шар такого размера с гелием имеет неплохую подъемную силу! Так что придерживайте его пока будете надувать (а лучше привяжите временно).
В этой операции использовались:
1. Клапан Голубева
2. Переходник под него
3. Шланг
4. Переходник со шланга на баллон 3/4 дюйма
Просто вставлю пару фото, чтобы дать понять масштабы:


Убедитесь что GPS трекер включен! Без него — вся эта затея будет провалена сразу после запуска. Далее подключаем питание к RPI и GoPro. Ждем успешный статус на RPI, включаем запись видео на камере, запаковываем короб, крепим к парашютному фалу, парашют к шару и… Поехали!
Нуштош... Скучности, так необходимые, заканчиваются, как и лимит символов на пост у Pikabu. В следующей части (Часть 1в) нас ждет: Поиск и спасение, Результаты (анализ телеметрии), Видео с бортовой камеры (и не только) и Выводы
Оставайтесь на связи и: Fly safe, cmdr!