
Самодельная четырехколесная полноприводная платформа для робота на Ардуино.
Я уже писал ранее о постройке такой платформы. После испытаний ее на радиоуправлении, кое-что перерисовал, создав версию, так сказать, 2.0.
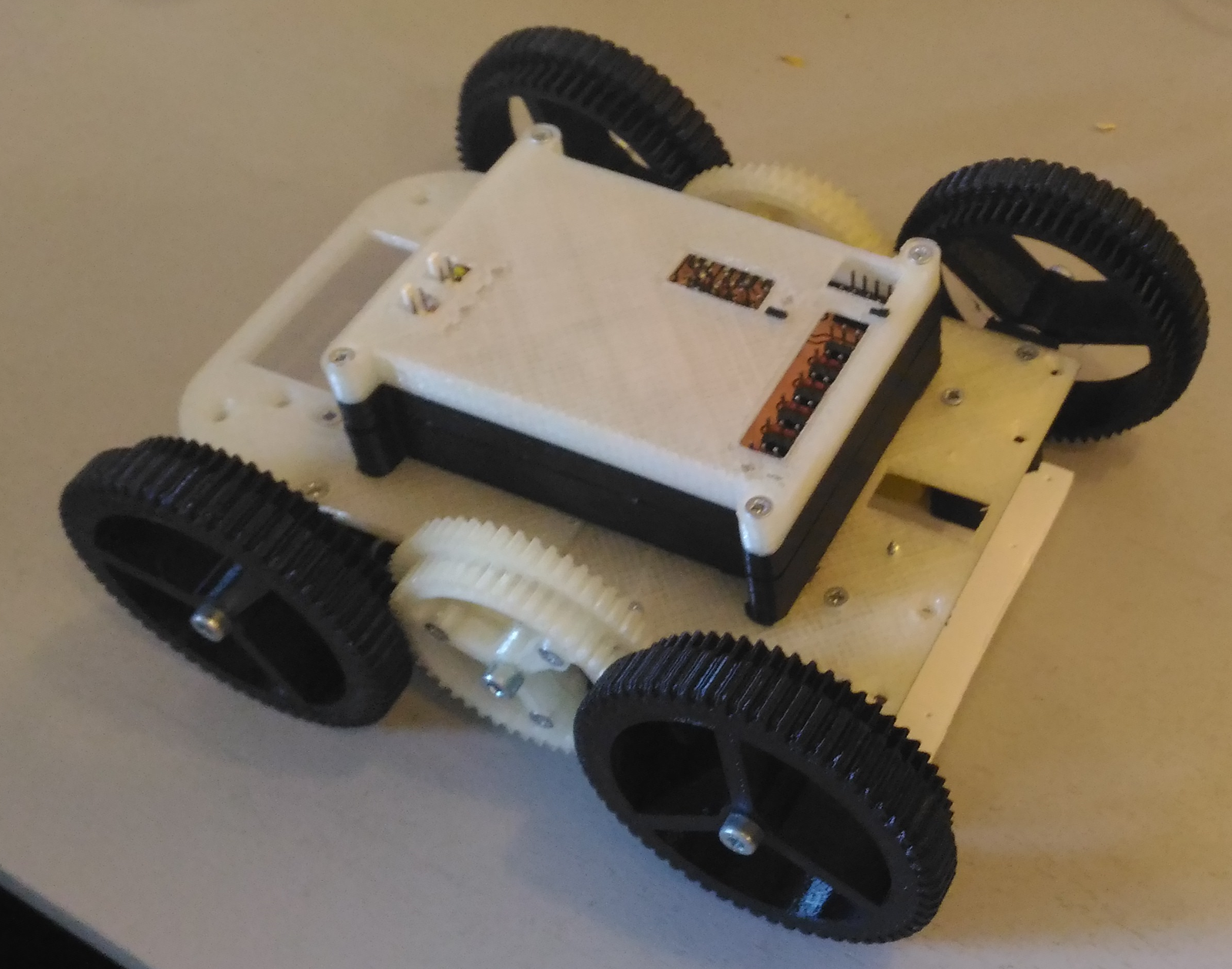
Передача крутящего момента на вторую пару колес также происходит с помощью редуктора.

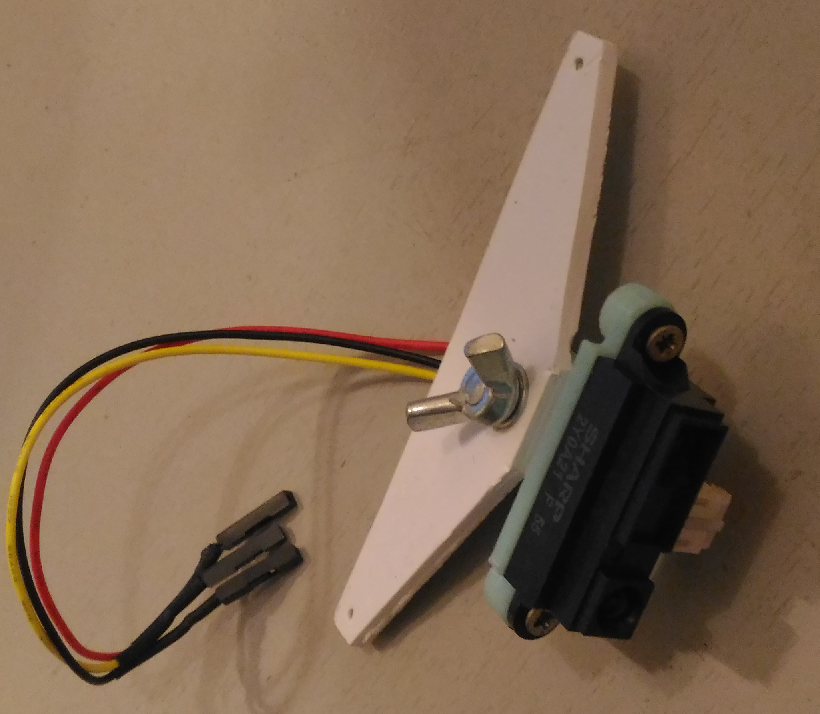
Теперь попробуем протестировать автономное движение платформы, оснастив ее различными датчиками. Дополнительные оборудование размещается на вырезанных из листового ПВХ ножом площадках, которые легко крепятся саморезами спереди и сзади платформы. На фото ультразвуковой дальномер и датчики линии.

Или, например, инфракрасный.
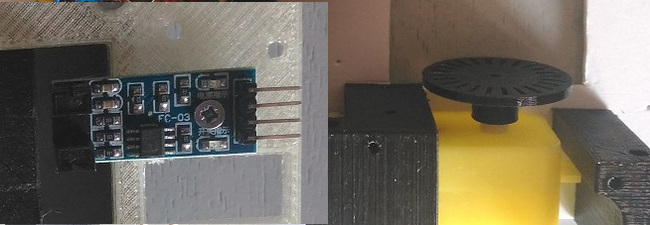
Датчик угла поворота со щелевым диском считает больше отверстий, чем их есть на самом деле. Нужно попробовать свой сделать, возможно это "дребезг контактов".
В остальном - бегает нормально, можно тренироваться в программировании и тестировать различные модели датчиков, которые легко устанавливаются. Результат тестирования платформы можно посмотреть на видео.
Arduino & Pi
1.5K поста20.9K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте - используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
• Нарушать установленные правила Пикабу