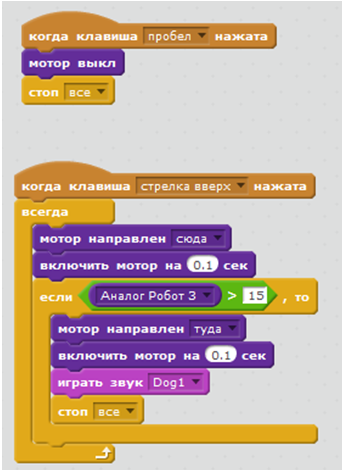
Клавиша "пробел" для экстренной остановки.
Как видите, все легко и просто. Короче говоря, у нас получилось целое руководство пользователя (можно скачать). Быстро исчерпав возможности робота, управляеого с копьютера при помощи программы Скретчдуино, я очень легко перешел на программирование в Ардуино. Таким образом, Ардуино стало моим хобби.
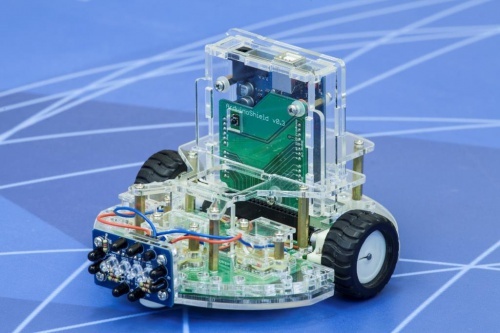
Посмотреть на робота, которого продают, можно на официальном сайте.
Как видите, главный недостаток - это достаточно высокая стоимость. Но разве мы не инженеры? Достоинство проекта в том, что все лежит в открытом доступе. Начиная от ПО и заканчивая чертежами, схемой, документацией на печатные платы и т.д.
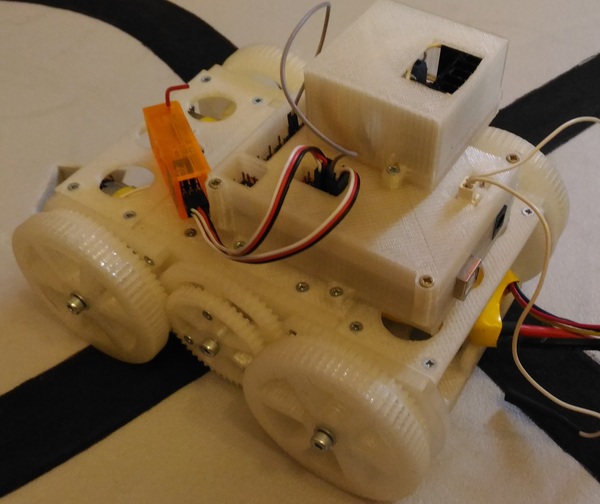
Мне сразу же пришло в голову построить робота под эту программу на китайском клоне Ардуино, что я и сделал.
Что еще интересного хотелось бы рассказать об этом проекте. Чтобы не заморачиваться с установкой ПО, драйверов и так далее, можно скачать образ флешки с установленным Линуксом, где уже установлено все нужное ПО - Arduino IDE, Скретчдуино 2.0. После скачивания образа, останется лишь записать его на флешку с помощью, например Unetbootin и выбрав при загрузке компьютера загрузку с этой флешки, сразу подключать робота. Ну и линукс на флешке - можно попользоваться и носить свою систему с собой в кармане, запустить ее можно на любом компьютере.
К сожалению, в Windows программа не видит робота, если установлен китайский клон Ардуино. Но и не страшно - флешка же есть.
Теперь ссылки того, что можно найти в абсолютно свободном доступе:
Здесь можно посмотреть на учебные материалы.
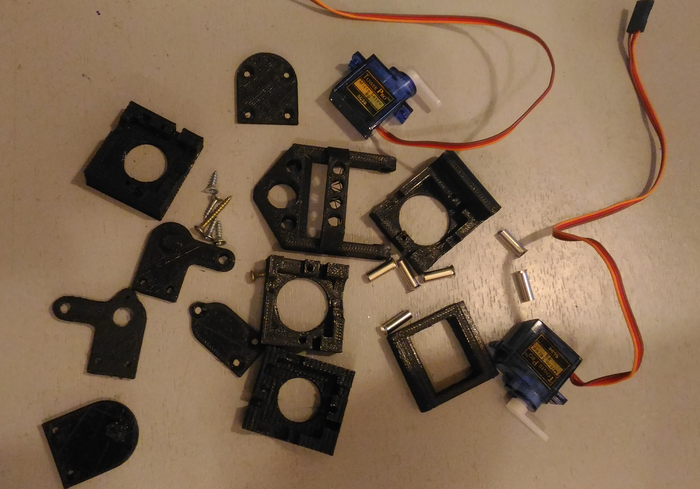
Здесь можно скачать документацию для изготовления.
Здесь можно скачать образ флешки с линуксом и установленным ПО.
Это вики проекта.
Прошивка находится в Скретчдуино 2.0, она заливается автоматически при запуске программы.
Надо сказать, что я тестировал устройство на дочери 12 лет, она саостоятельно прочитала руководство и придумала собственные задания для робота. Вообще детям и подросткам нравится быстрый успех и программирование здесь не исключение. Хоть я далеко не подросток, но познакомившись с этим проектом, приобрел интересное хобби - Ардуино. Если кого-то заинтересует, готов отвечать на вопросы.