

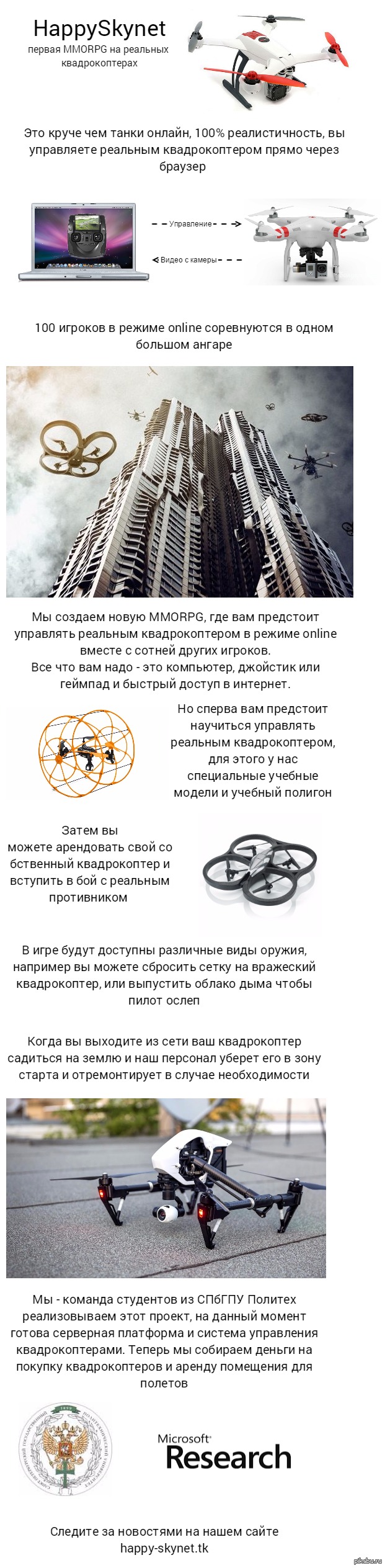
HappySkynet MMORPG на квадрокоптерах
Команда из СПбГПУ Политех создает революционную MMORPG
Я конечно не маркетолог, но!
Есть мнение, что лучше сделать не войнушку в ангаре, а гоночную трассу с различными препятствиями. Разбить квадры на классы (по мощности, скорости ну или по стоимости) для нубов - первый класс, дешёвенькие квадры, экшена будет хоть отбавляй. Можно устроить режим догони или эстафетный и т.п.
Про то, что желания не будет - желание будет - вопрос лишь в ваших финансах и как вы будете окупать проект (реклама, ежемесячная абонентка и т.д.)
В итоге - вам нужно сделать, что бы было дешевле погонять у Вас, чем покупать свой квадр и гонять на нём. ИМХО
Пол команды тоже так считает, но как показали тесты на людях без опыта, гонки для них слишком сложно, там нужен скил управления.
Мы подумаем над этим, для гонок нам нужна сложная система позиционирования на лазерах (как утверждают наши инженеры) без нее не точно получается определять кто первее пришел и не выходил с дистанции
вы лучше сперва дайте 10 15 людям которые вообще не умеют летать на квадакоптаре и опробуйте свою идею, если все квадракоптары разобьют то лучше не начинать :)
А для учета повреждений в войнушке лазер не потребуется? Там же то же нужны учёт состояния повреждения, устройство ведения пусть и виртуального огня, это всё нужно вешать на квадр, он тяжелеет и на сколько хватит этой войнушки? на 5-10 минут? - когда для гонок этих 5-10 минут может хватить на трассу и вешать на квадр ничего не нужно, достаточно думаю будет радиометки на каждом препятствии, что бы квадр там отмечался и летел дальше, а подсказки можно реализовать программно - например стрелочками.
А можно лазерным позиционированием ограничить дистанцию маневрирования, чтобы квады лишний раз не разбивали?
используйте не лазеры, а радио маячки, их в модельных соревнованиях используют, тут на пикаба был пост про то как парень делает такие маяки. каждый маячо имеет индивидуальный номер и при пересечении финиша срабатывает кажется. надо точно поискать, но никаких лазеров, это они перегнули.
для контроля выхода за дистанцию так же маяки, излучатели, ставится на трассе три стации приемника и вычисляется положение в пространстве по времени задержки сигнала, дальше сравнивается с виртуальной картой. при этом надо ввести допуска на выход за дистанцию, что считать сокращением пути по прямой, что непреднамеренным. сделать такую систему как... ну в общем не сложно.
для начала может вам сделать онлайн трансляцию полётов на коптере? может людям будет интересно посмотреть город с высоты полёта. или что-то интерактивное. может для начала машинку на радиоуправлении с камерой, чтобы по институту ездила, а ей люди управляли.





