
CoDeSyS 3.5 Soft Motion. Как добавить ось сервопривода?
Для различных точных систем, где требуется позиционирование рабочего элемента, манипуляторов и роботов существуют специальные готовые решения. И одно из них это PAC-ПЛК с CoDeSyS на борту.
Эта статья будет посвящена готовой библиотеке под названием Soft Motion в дистрибутиве CoDeSyS. Как обычно стараюсь писать по существу, без всякой воды.
Вторая часть Soft Motion. Эта статья будет посвящена подключению Сервопривода по EtherCAT.
Настройки в дереве объектов
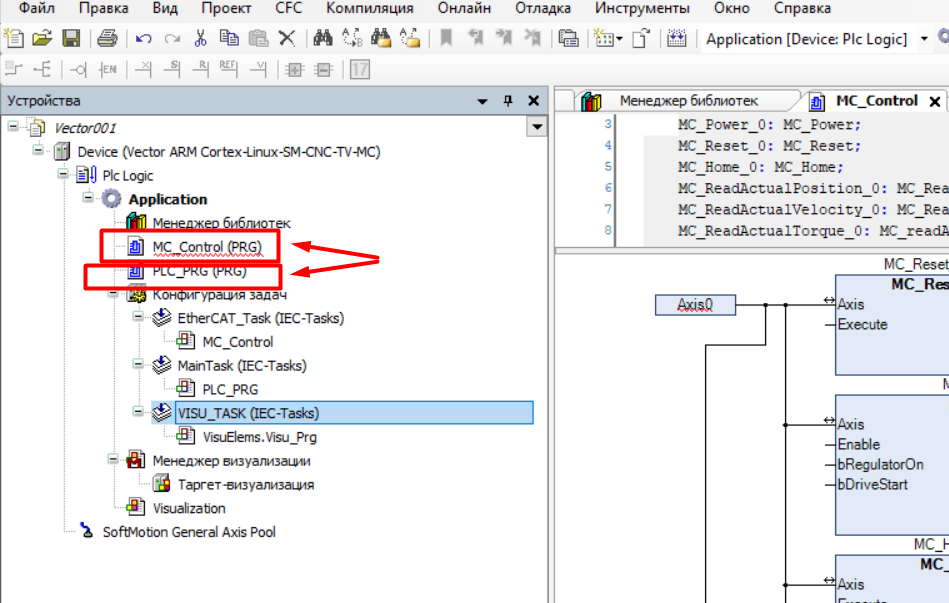
Создаем две программы. отдельно для основных задач, отдельно для задач управления Осями.
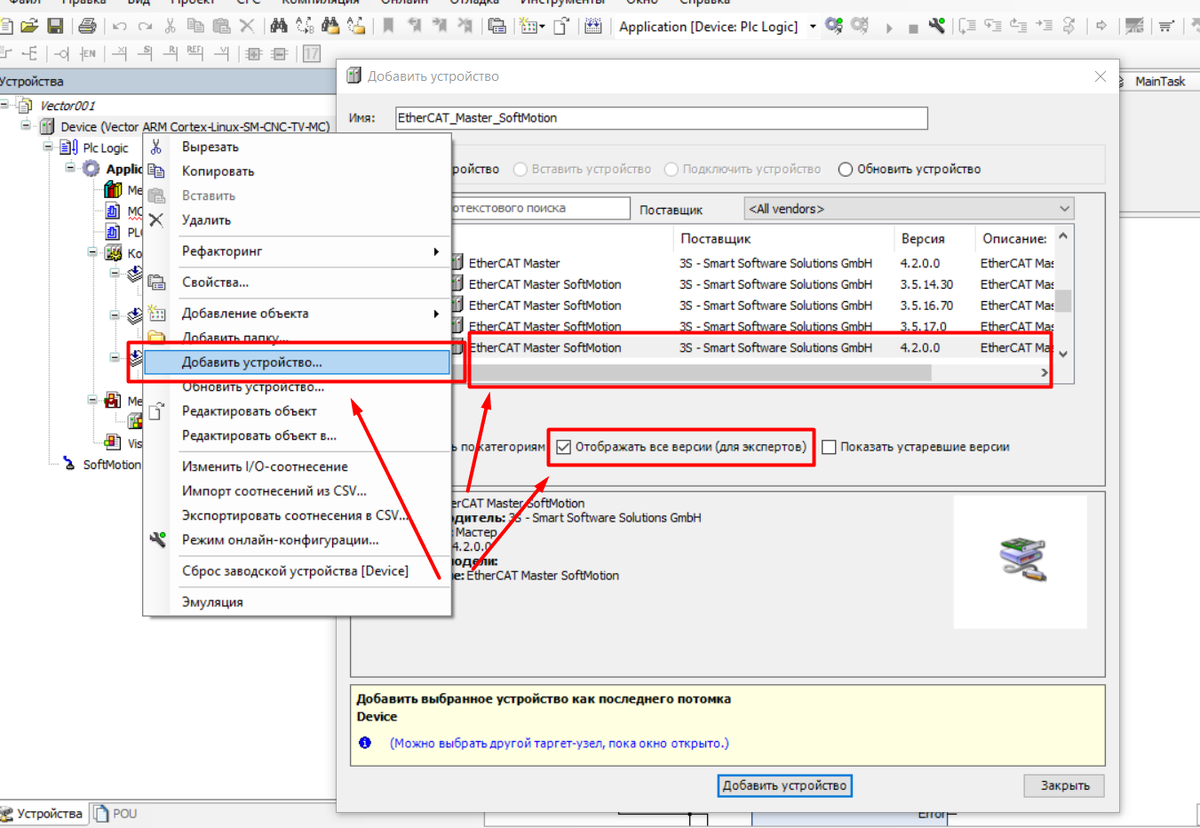
После этого добавляем новое устройство EtherCAT. Лучше добавить той версии, в которой создан ваш проект.
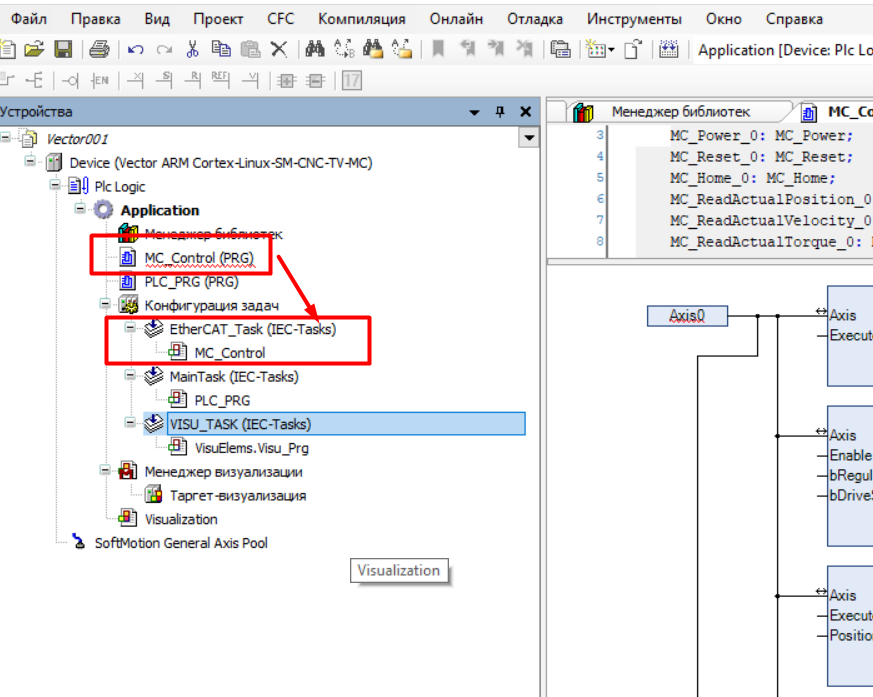
В задачу нужно переместить вашу программу.
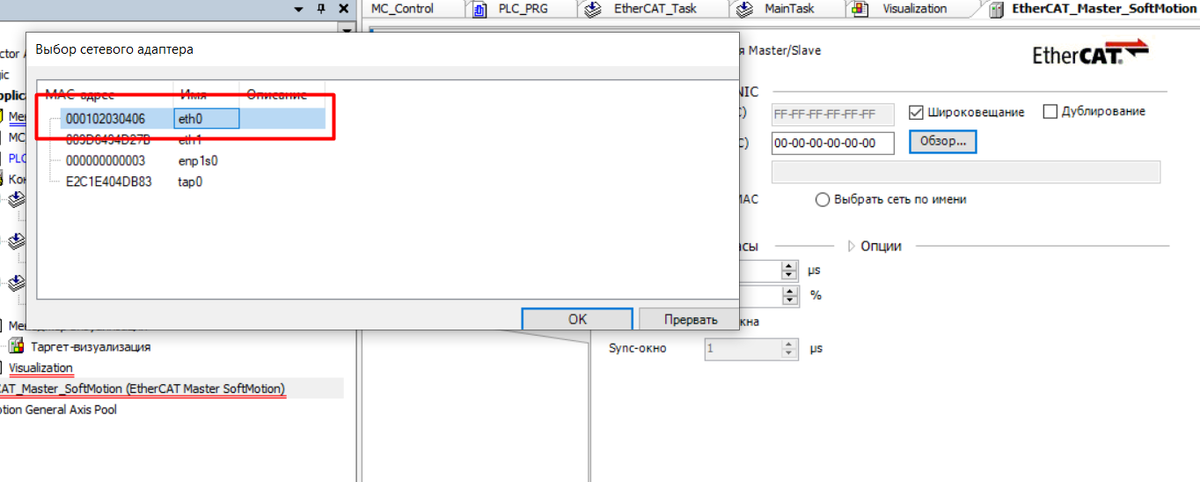
После этого выбираем MAC внешней шины EtherCAT.
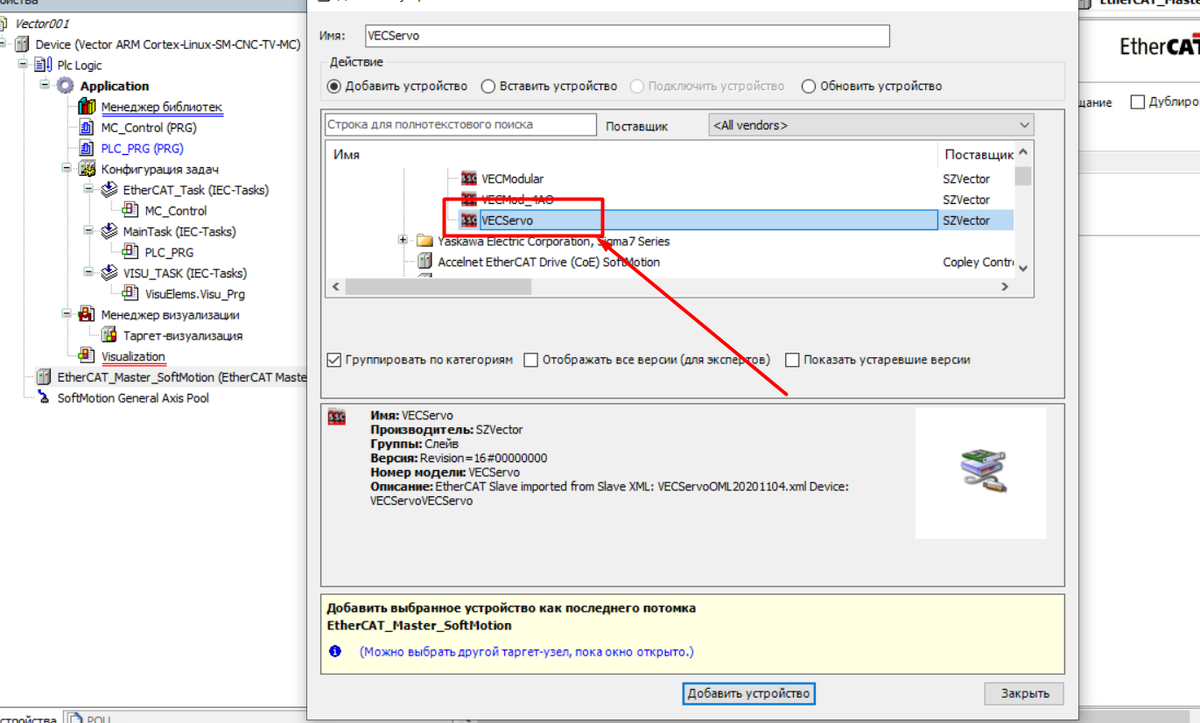
Добавляем устройство Сервопривода.
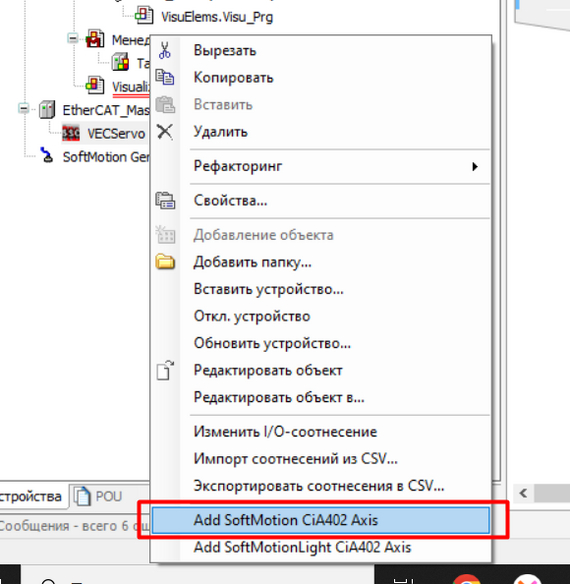
Добавляем Ось Axis.
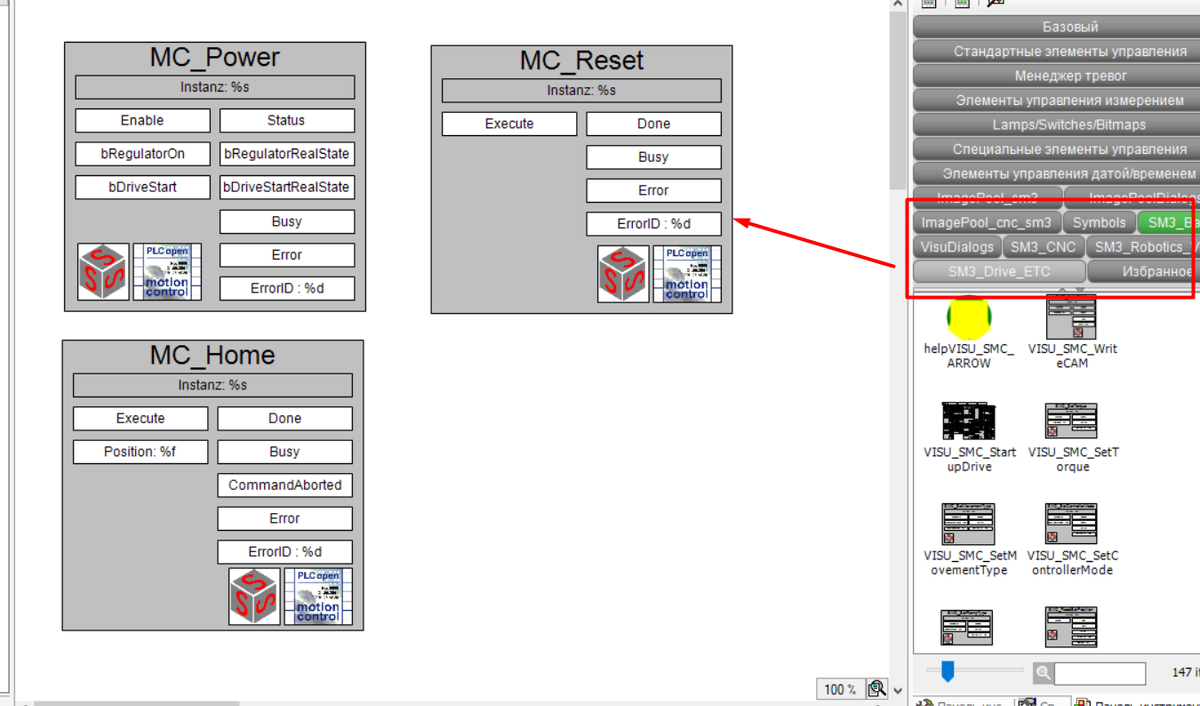
Можно создать визуализацию, и на ней перекинуть базовые блоки Soft Motion.
И конечно же результаты. Всем пока-пока.