
Hardiman 1: первый силовой экзоскелет
Текстовая версия:
Ориентировочно в 1965 году компания General Electric и вооруженные силы США подписали контракт, согласно которому было необходимо разработать первый практичный силовой экзоскелет. Проект получил наименование «Hardiman 1», что является сокращением от полного обозначения «Human Augmentation Research and Development Investigation manipulator», что можно перевести на русский язык как «Манипулятор для исследований и разработок в области аугментации человека». А цифра 1 соответственно обозначала первую модель.

Разработку возглавил американский инженер Ральф Мошер. В конце 60-х годов 20-ого века он трудился над другим проектом под обозначением «Handyman». На английском языке этим словом обозначают человека, который любит мастерить что-либо, ну или по нашему «рукастый» или же «мастер на все руки». Проект проходил при финансовой поддержке все той же General Electric и был направлен на разработку манипуляторов.

Интересно отметить, что свой проект «Handyman» Ральф Мошер осуществлял не для какого-нибудь склада с погрузкой ящиков, а для военной программы «Ядерная энергия для движения самолета». Я думаю, что из названия понятна главная цель – разработка ядерной силовой установки. Кстати у меня на канале есть обзор самого ультимативного и «грязного» ядерного оружия времен «Холодной войны», а именно видео про крылатую ракету «SLAM» с таким двигателем, рекомендую:
Давайте теперь закончим с названием «Hardiman», а конкретно со словом аугментация. Главное значение это увеличение, усиление, приращение и т.д. Так что в ключе нашей разработки, проект можно перевести как «Манипулятор для исследований и разработок в области увеличения силы человека». Как Вы уже поняли, раз в проекте участвуют военные, то гражданское применение было не на первом плане, но не нужно думать, что армия США планировала сразу оснастить экзоскелет оружием и направить в бой, хотя я думаю, в дальнейшем такие планы были.
В первоначальном варианте планировалось использовать экзоскелеты «Hardiman» на аэродромах. В частности главной задачей должна была стать работа по подвесу ракетно-бомбового вооружения. Идея была проста – сократить время за счет отказа от лебедок и подъемников, ведь гораздо проще и быстрее взять и прицепить боеприпасы на подвесы руками. Таким образом, это позволило бы гораздо чаще производить боевые вылеты самолётов, в том числе и с авианосцев.
Если обратиться к официальному отчету, то там можно найти информацию, о том какую именно цель ставили General Electric. Предполагалось увеличение силы оператора примерно в 25 раз, т.е. поднятие оператором 100 килограммов ощущалось бы им как 4. Максимальный вес, которым можно будет оперировать в экзоскелете, описывался довольно размытой фразой «более 1000 фунтов», что примерно равно 450 килограммам.

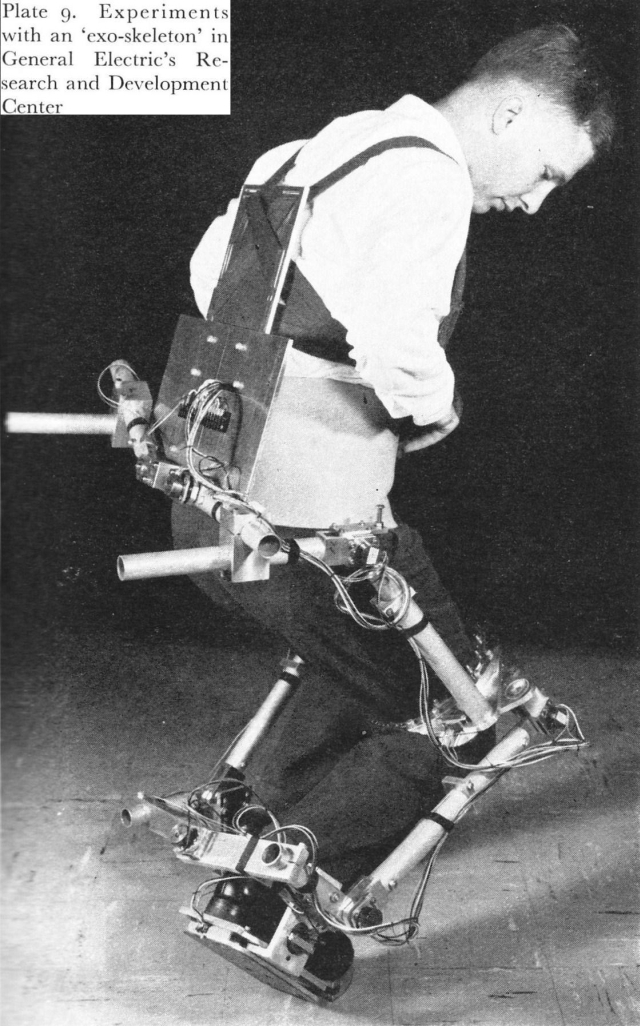
Первые наработки по «Hardiman» появились уже к ноябрю 1965 года. Вначале инженеры сосредоточились на изучении кинематики применительно к взаимодействию оператора и экзоскелета. Сложнейшей задачей было придумать и настроить систему, которая отслеживала движения человека и дублировала их с достаточной четкостью и отзывчивостью. Итогом стало решение о разделении экзоскелета на две составные части: нижнюю - для ног и пояса и верхнюю для рук.
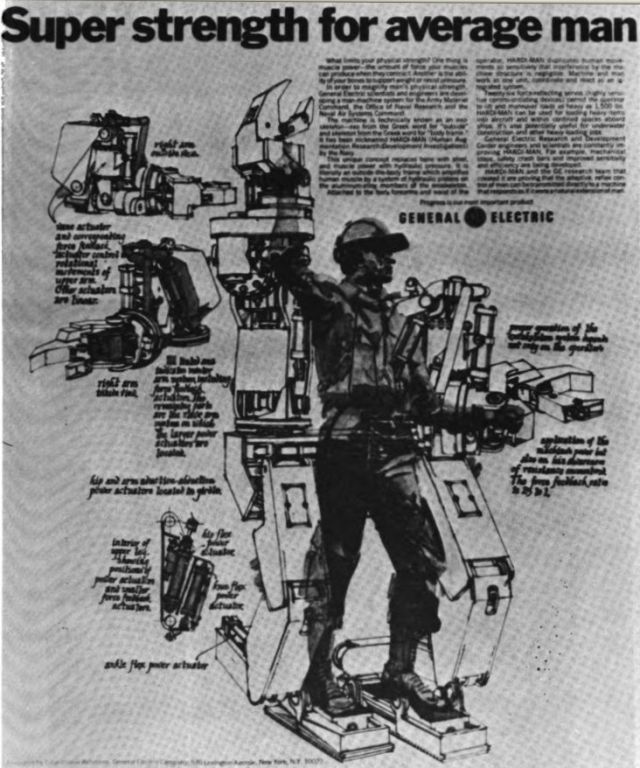
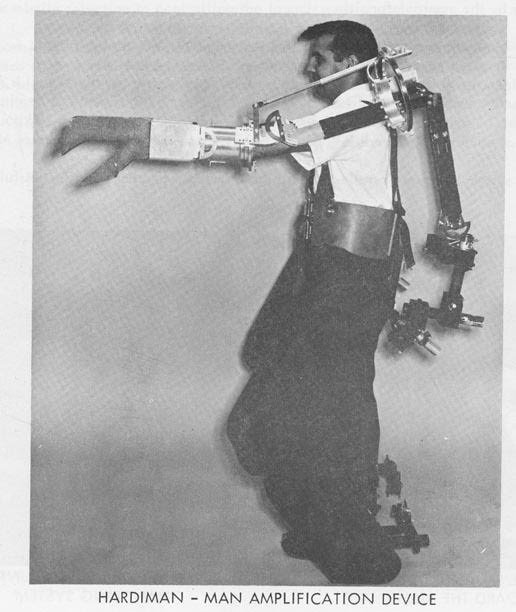
Интересно, но сам факт разработки «Hardiman» не являлся тайной. Так, начиная с 1966 года, в прессе начали появляться первые рисунки и фотографии концептов нового изобретения, которые не совсем соответствовали внешнему виду будущего экзоскелета. А сама General Electric выпустила рекламный постер. Идею подхватили в Голливуде, и уже в декабре 1967 года в прокат вышел фильм «The Ambushers» (в русской локализации «Сидящие в засаде»).
Изначально инженеры применили гидравлическую систему для движения частей «Hardiman». С помощью клапанов в суставах, которые срабатывали от нажатия телом оператора, повышалось и понижалось давление в рабочих цилиндрах, которые приводили в движение конечности. Но точность и стабильность работы при таком решении была крайне неудовлетворительная. Вдобавок мощности гидравлической системы не хватало для того, чтобы двигать ногами с достаточной скоростью.

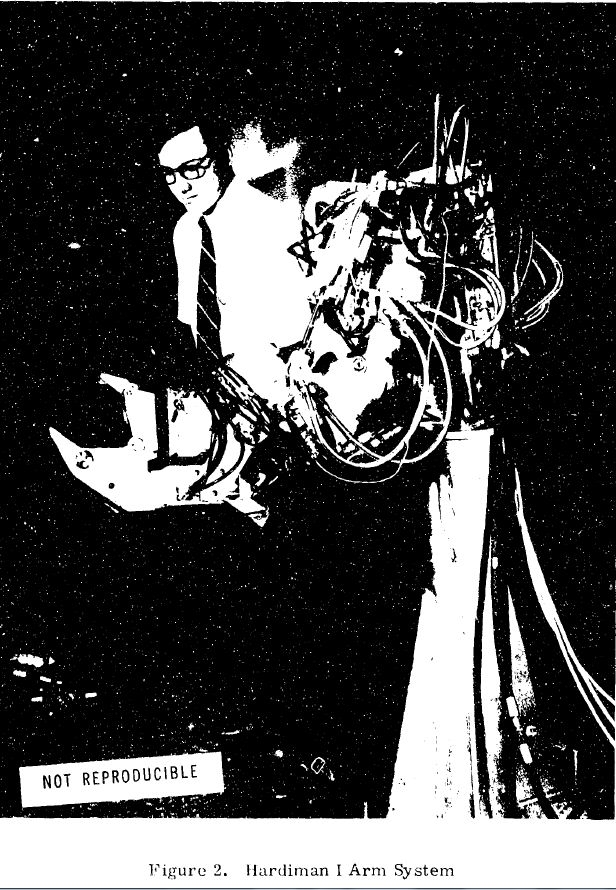
В апреле 1968 года был завершен очередной этап испытаний, итогом которых являлся переход на применение электрогидравлических приводов. Планировалось, что нижняя часть экзоскелета будет выполнена первой, но от этой идеи отказались ввиду сложности и сконцентрировались на руках. Теперь электрические датчики регулировали давление в исполнительных цилиндрах через управляемые обороты двигателей нагнетателей, и точность движений значительно повысилась.
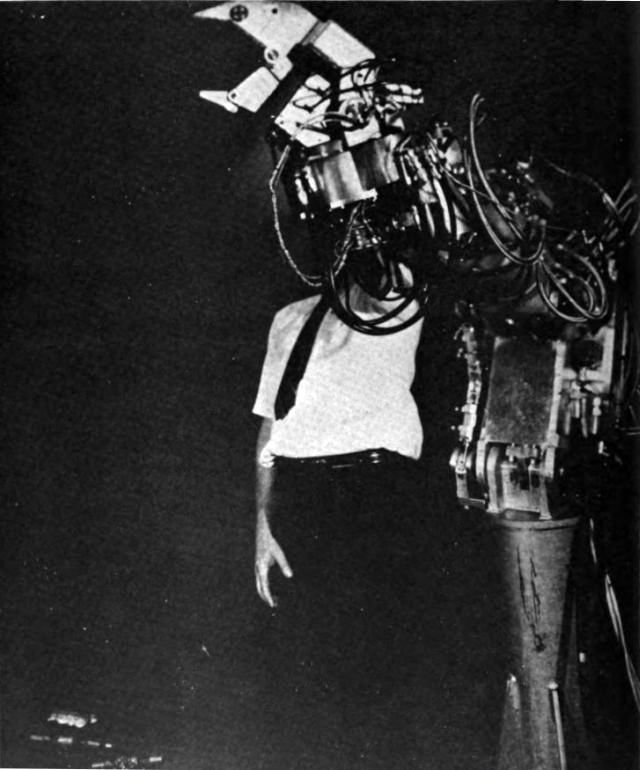
К кону 1969 года инженерам General Electric удалось сконструировать рабочий прототип левого манипулятора. С его помощью получилось поднять 340 килограммов, но была одна проблема: вес самой механической руки составлял 750 килограммов, что в два раза превышало подъемную мощность. А вес полностью собранного «Hardiman» на тот момент составлял более 3-х тонн. Естественно в таком виде экзоскелет нельзя было допускать до каких-либо работ.
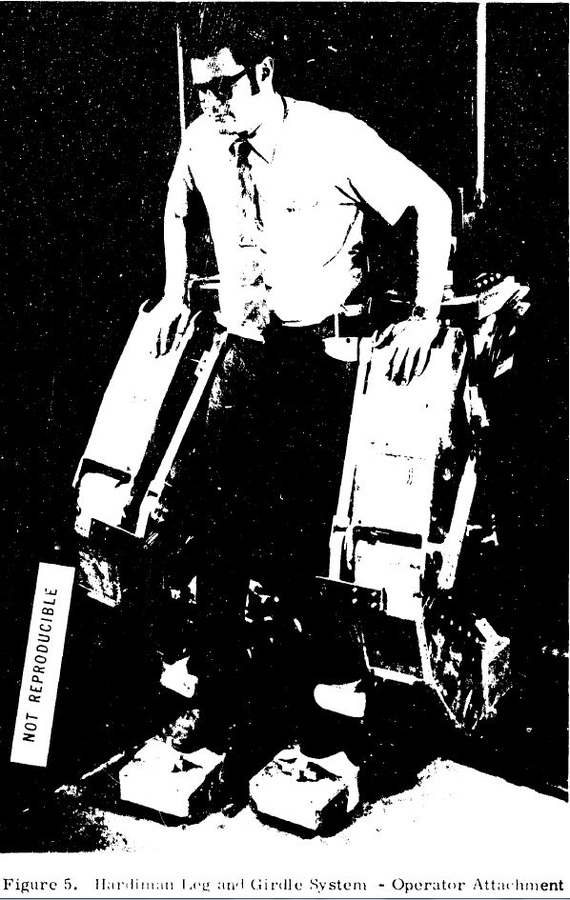
Что касается нижней части, то она была закончена в конце 1970 года. Я напомню, что в эту систему входили ноги и пояс. До конца не ясно, как далеко продвинулись инженеры General Electric в этой части, но грандиозных успехов там не было. Возникли большие проблемы в кинематике, которые не могли быть решены в рамках программы. Полноценного перемещения так и не удалось добиться, тем более кое-как работала только одна нога, а другая просто была прикреплена в области пояса.
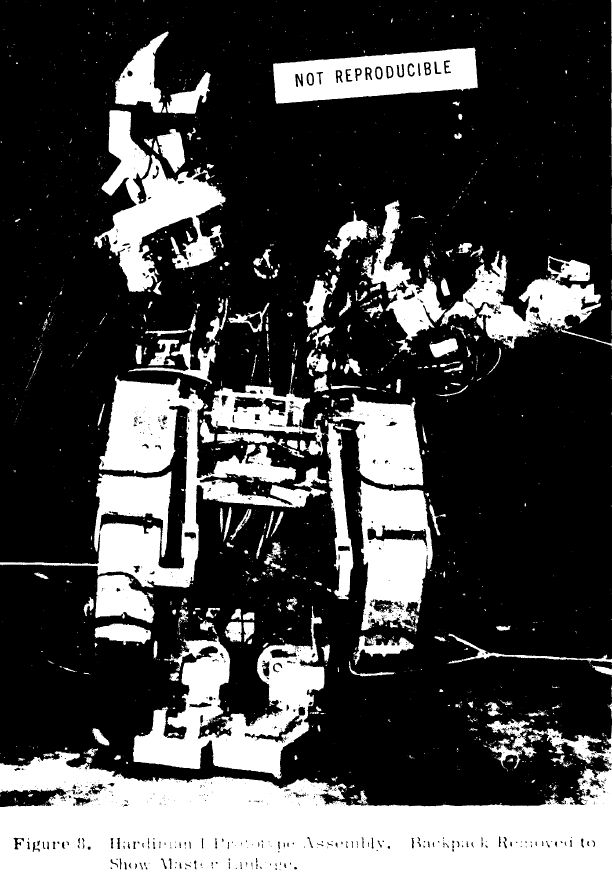
Давайте подведём небольшой итог. General Electric удалось разработать и сконструировать экзоскелет «Hardiman». Однако рабочей оставалась только левая рука и то, стоящая на специальном стенде, хотя вторая была так же воплощена в металле. Было сконструировано две ноги, но кое-как функционировать могла только одна. Поддерживать баланс и ходить без посторонней помощи оператор был не в состоянии. Гибкость была ограничена 28 движениями, плюс были доступны лишь две степени «захвата». Таким образом, как-либо функционировать в полностью собранном виде «Hardiman» не мог, он годился разве что для фотографий. Любая попытка использования экзоскелета в собранном виде заканчивалась интенсивным неконтролируемым движением, в результате чего он никогда не проверялся с человеком внутри.
Мне сложно дать какую-то оценку данному проекту, так как это была первая попытка создать практичный экзоскелет, да я знаю, что и раньше были какие-то наработки по этой теме, но вот именно в таких масштабах это было впервые. Принимая во внимание все вышеперечисленные трудности, а также главную проблему, которая заключалась в создании мобильного и мощного источника питания проект экзоскелета «Hardiman 1» был закрыт в 1971 году.
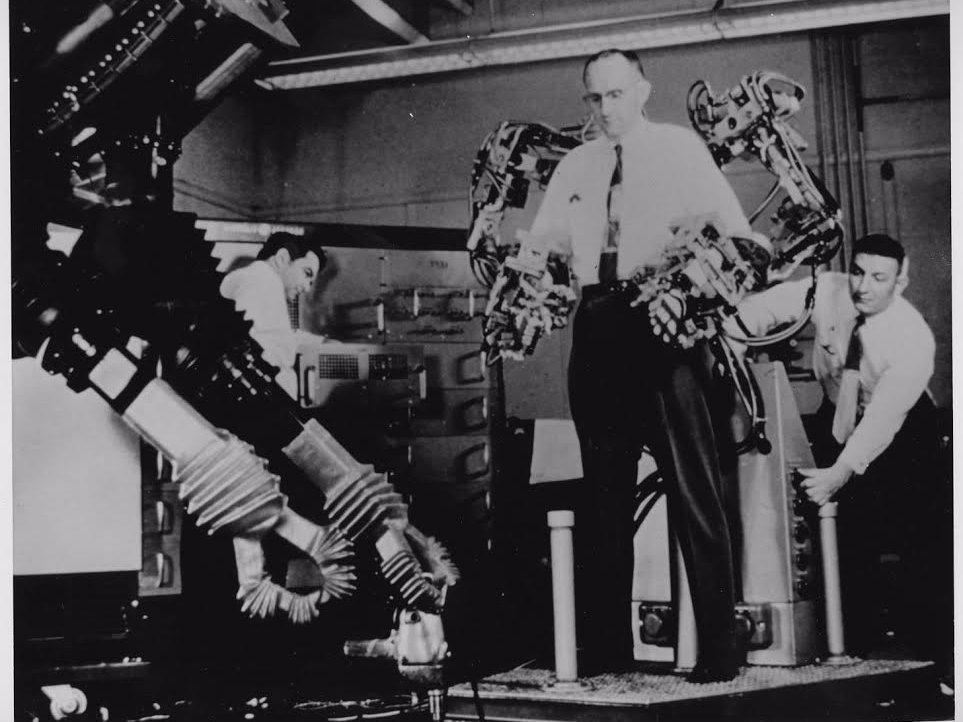
Под конец разработки Ральф Мошер с коллегами предлагал разнообразные варианты машин, которые развивали эту идею. В частности манипуляторы для погрузки и разгрузки, которые были призваны значительно снизить издержки на рабочую силу и технику. Ниже вы видите фотографию, на которой изображен сам Ральф Мошер (по центру), его коллега, ранний концепт «Hardiman» и «шагающий грузовик», в котором угадываются черты, так называемой «робота-собаки» от «Boston Dynamics», так что вполне вероятно, что наработки по проекту не были утеряны безвозвратно.

Ну и напоследок я предлагаю опять вернуться кино, а точнее к одной из моих любимых картин: научно-фантастическому фильму режиссёра Джеймса Кэмерона 1986 года «Aliens» («Чужие»). Ведь, по моему мнению, именно экзоскелет «Hardiman» послужил источником вдохновения при создании погрузчика «Caterpillar» P-5000 - шагающей грузовой машине, на которой Эллен Рипли сначала таскала ящика, а потом сражалась с королевой Чужих.

На этом все, удачи!