Пилотируем большой реактивный(часть 2)

Центровка (CG)
Центровка воздушного судна (Center of Gravity (CG) position)— положение центра тяжести, измеряемое в процентах длины так называемой средней аэродинамической хорды (САХ, Mean Aerodynamic Chord, MAC) — т.е. хорды условного прямоугольного крыла, равноценного данному крылу, и имеющее с ним одинаковую площадь.
Хорда — отрезок прямой, соединяющий переднюю и заднюю кромку профиля крыла.
Длину средней аэродинамической хорды находят интегрированием по длинам хорд вдоль всех профилей полукрыла. Грубо говоря, САХ характеризуют наиболее распространенный, наиболее вероятный профиль крыла. т.е. предполагается, что все крыло со всем его разнобоем профилей можно заменить одним единственном усредненным профилем с одной единственной усредненной хордой — САХ.
Чтобы найти положение САХ, зная его длину, нужно пересечь САХ с контуром реального крыла и посмотреть, где находится начало полученного отрезка. Эта точка (0% САХ) и будет служить точкой отсчета для определения центровки.
На рисунке показано положение центра тяжести 25% САХ.
Разумеется, транспортный самолет не может иметь постоянную центровку. Она будет меняться от вылета к вылету из-за перемещений грузов, изменения количества пассажиров, а также в процессе полета по мере выработки топлива. Для каждого самолета определен допустимый диапазон центровок, при котором обеспечивается его хорошая устойчивость и управляемость. Обычно различают переднюю (для Ту-154Б — 21-28%), среднюю (28-35%) и заднюю (35-50%) центровки — для других типов цифры будут несколько отличаться.
Центровка пустого самолета сильно отличается от центровки заправленного самолета со всеми грузами и пассажирами, и для ее расчета перед вылетом заполняется специальный центровочный график.
Пустой Ту-154Б имеет центровку порядка 49-50% САХ, при том, что при 52,5% он уже опрокидывается на хвост (двигатели на хвосте перетягивают). Поэтому под хвостовой частью фюзеляжа в некоторых случаях необходимо устанавливать страховочную штангу.
Балансировка в полете
У самолета со стреловидным крылом центр приложения подъемной силы на крыле расположен в точке примерно 50-60% САХ, т.е. позади центра тяжести, который в полете обычно располагается в районе 20-30 % САХ.
В результате, в горизонтальном полете на крыле возникает рычаг подъемной силы, который хочет опрокинуть самолет на нос, т.е. в нормальной ситуации самолет находится под действием пикирующего момента.
Чтобы избежать всего этого, в течении всего полета придется парировать возникающий пикирующий момент балансировочным отклонением РВ, т.е. отклонение руля высоты не будет равно нулю даже в горизонтальном полете.
В основном, чтобы удержать самолет от "клевка" нужно будет создавать кабрирующий момент, т.е. РВ нужно будет отклоняться вверх.
Кабрировать — от фр. cabrer , "ставить на дыбы".
Всегда только вверх? Нет, не всегда.
При увеличении скорости, скоростной напор увеличится, а значит пропорционально возрастет суммарная подъемная сила на крыле, на стабилизаторе и на руле высоты
F под = F под1 – F под2 – F под3

Но сила тяжести останется прежней, а значит самолет перейдет в набор. Чтобы снова сбалансировать папелац в горизонтальном полете, придется опустить руль высоты пониже (отдать штурвал от себя), т.е. уменьшить слагаемое F под3. Тогда нос опустится, и самолет снова сбалансируется в горизонтальном полете, но уже на меньшем угле атаки.
Таким образом, для каждой скорости у нас будет свое балансировочное отклонение РВ — мы получим ажно целую балансировочную кривую (зависимость отклонения РВ от скорости полета). На больших скоростях, придется отдавать штурвальную колонку от себя (РВ вниз), чтобы удержать самик от кабрирования, на малых скоростях придется брать штурвальную колонку на себя (РВ вверх), чтобы удержать самик от пикирования. Штурвал и руль высоты будут находится в нейтральном положении только на какой-то одной определенной приборной скорости (около 490 км/ч для Ту-154Б).
Стабилизатор (Horizontal Stabilizer)
Кроме того, как видно из приведенной схемы, самолет можно балансировать не только рулем высоты, но и переставным стабилизатором (слагаемое Fпод2). Такой стабилизатор с помощью специального механизма может целиком устанавливаться на новый угол. Эффективность такой перекладки будет примерно в 3 раза выше — т.е. 3 град отклонения РВ будут соответствовать 1 град отклонения стабилизатора, т.к. его площадь горизонтального стабилизатора у "тушки" примерно в 3 раза больше площади РВ.
В чем преимущество использования переставного стабилизатора? Прежде всего в том, что при этом уменьшается расход руля высоты. Дело в том, что иногда из-за слишком передней центровки для удержания самолета на определенном угле атаки приходится использовать весь ход штурвальной колонки — пилот выбрал управление полностью на себя, и дальше самолет уже не заманишь вверх никакой морковкой. Это особенно может иметь место на посадке с предельно передней центровкой, когда при попытке ухода на второй круг, руля высоты может не хватить. Собственно говоря, значение предельно передней центровки и устанавливаются из расчета, чтобы располагаемого отклонения руля высоты хватало на всех режимах полета.
Поскольку РВ отклоняется относительно стабилизатора, то нетрудно видеть, что применение переставного стабилизатора уменьшит расход штурвала и увеличит доступный диапазон центровок и доступных скоростей. А значит можно будет взять больше грузов и расположить их более удобным способом.
В горизонтальном полете на эшелоне стабилизатор Ту-154 находится под углом -1.5 град на кабрирование по отношению к фюзеляжу, т.е. почти горизонтально. На взлете и на посадке, он перекладывается дальше на кабрирование на угол до -7 град относительно фюзеляжа, чтобы создать достаточный угол атаки для поддержания самолета в горизонтальном полете на малой скорости.
Особенностью Ту-154 является то, что перестановка стабилизатора осуществляется только на взлете и на посадке, а в полете он убирается в положение -1.5 (которое считается нулевым), и самолет тогда балансируется одним рулем высоты.
При этом, для удобства экипажа и по ряду других причин, перекладка совмещена с выпуском закрылков и предкрылков, т.е. при переводе рукоятки закрылков из положения 0 в положение на выпуск, автоматически выпускаются предкрылки и стабилизатор перекладывается в согласованное положение. При уборке закрылков после взлета — то же самое, в обратном порядке.
Приведем таблицу, которая висит в кабине экипажа, чтобы постоянно ему напоминать, что у них там блин на фиг выпускается...

Таким образом, все происходит само собой. На круге перед посадкой на скорости 400 км/ч экипаж только должен проверить соответствует ли балансировочное отклонение РВ положению задатчика стабилизатора и, если нет, то устанавить задатчик в нужное положение. Скажем, стрелка указателя положения РВ в зеленом секторе, значит задатчик ставим на зеленое "П" — все достаточно просто и не требует значительных умственных усилий...

При отказах автоматики все выпуски и перекладки механизации можно проделать и в ручном режиме. Например, если речь идет о стабилизаторе, нужно откинуть колпак слева на фото и переставить стабилизатор в согласованное положение.
На других типах ВС, эта система работает иначе. Например на Як-42, MD-83, B-747 (затрудняюсь сказать за всю Одессу, но так должно быть на большинстве западных самолетов) стабилизатор отклоняется в течение всего полета и полностью заменяет собой триммер. Такая система более совершенна, т.к позволяет уменьшить сопротивление в полете, поскольку стабилизатор из-за большой площади отклоняется на меньшие углы, чем РВ.
На Як-40, Ту-134 стабилизатор также обычно регулируется независимо от механизации крыла.
Теперь об MSFS. В симуляторе мы имеем ситуацию "триммирующего стабилизатора", как на западных типах. Отдельного виртуального триммера в МSFS нет. Та прямоугольная штучка (как на "цесссне"), которая у микрософт называется "триммером" на самом деле является стабилизатором, что заметно, по независимости ее работы от РВ.
Почему так? Вероятно, все дело в том, что изначально (в конце 80-х) FS использовался как программная база для полнофункциональных тренажеров, на которых стояли реальные штурвальные колонки и реальные МЭТ-ы. Когда МS купила (сперла?) FS, она не стала глубоко вникать в особенности его работы (а возможно, даже не имела к нему полного описания), поэтому стабилизатор стал называться триммером. По крайней мере, такое предположение хочется сделать, изучая MS+FS, ведь описание к air-файлу так и не было опубликовано, а по качеству дефолтных моделей и ряду других признаков можно сделать вывод, что микрософт и само в нем не особо разбирается.
В случае Ту-154, вероятно, следует установить микрософтовский триммер один раз перед посадкой в горизонтальном полете, чтобы индикатор руля высоты был приблизительно в нейтральном положении, и больше к нему не возвращаться, а работать только триммером джойстика, которого ни у кого нет... Или работать c "прямоугольной штучкой", закрывать глаза и повторять про себя: "Это не стабилизатор, это не стабилизатор...."
Автомат тяги (Auto Throttle)
В штурвальном режиме КВС или 2П управляет двигателями с помощью РУД-ов (рычагов управления двигателями) на среднем пульте или подавая команды бортинженеру: "Режим такой-то"
Иногда бывает удобно управлять двигателями не вручную, а с помощью автомата тяги (auto throttle, АТ), который старается удержать скорость в допустимых пределах, автоматически регулируя режим двигателей.
Включите АТ (клавиша Shift R), задайте нужную скорость на УС-И (указатель скорости), и автоматика будет пытаться выдерживать ее без вмешательства пилота. На Ту-154 скорость при включенном АТ-6-2 можно регулировать двумя способами 1) вращая кремальеру на левом либо на правом УС-И 2) вращая регулятор на ПН-6 (=пультик СТУ и автомата тяги).
РАЗНОВИДНОСТИ СИСТЕМ ПОСАДКИ
Различают визуальный заход и заход по приборам.
Чисто визуальный заход на посадку на больших самолетах применяется редко и может вызвать трудности даже у опытного экипажа. Поэтому обычно заход осуществляется по приборам, т.е. с применением радиотехнических систем под управлением и контролем диспетчера УВД.
Управление воздушным движением (УВД, Air Traffic Control, ATC) — управление движением воздушных судов в полете и на площади маневрирования аэродрома.
Радиотехнические системы посадки
Рассмотрим заходы с применением радиотехнических систем посадки. Их можно подразделить на следующие типы:
“по ОСП”, т.е. с использованием ДПРМ и БПРМ
“по РМС”, т.е. с использованием ILS
“по РСП”, т.е. по локатору.
Заход по ОСП
Также известен как "заход по приводам".
ОСП (оборудование системы посадки) — комплекс наземных средств, включающих две приводных радиостанции с маркерными радиомаяками, а также светотехническое оборудование (СТО), установленное на аэродроме по утвержденной типовой схеме.
Конкретно, ОСП включает в себя
"дальний" (приводной радиомаяк) (ДПРМ, Outer Marker, OM)
— дальнюю приводную радиостанцию со своим маркером, которая располагается в 4000 (+/- 200) м от торца ВПП. При пролете маркера в кабине срабатывает световая и звуковая сигнализация. Морзянка cигнала в системе ILS имеет вид “тире-тире-тире...“.
"ближний" (приводной радиомаяк) (БПРМ, Middle Marker, MM)
— ближнюю приводную радиостанцию тоже со своим маркером, которая располагается в 1050 (+/- 150) м от торца ВПП. Морзянка в системе ILS имеет вид “тире-точка-...“
Приводные радиостанции работают в диапазоне 150-1300 кГц.
При полете по кругу, первый и второй комплекты автоматического радиокомпаса (АРК, Automatic Direction Finder, ADF) настраиваются на частоты ДПРМ и БПРМ— при этом одна стрелка на указателе АРК будет показывать на ДПРМ, вторая на БПРМ.
Напомним, что стрелка указателя АРК всегда показывает на радиостанцию подобно тому, как стрелка магнитного компаса, всегда показывает на север. Следовательно, при полете по схеме, момент начала четвертого разворота можно определить по курсовому углу радиостанции (КУР). Скажем, если ДПРМ радиостанция точно слева, то КУР=270 град. Если мы хотим развернуться на нее, то разворот нужно начинать на 10-15 град раньше (т.е. при КУР=280...285 град). Пролет над радиостанцией будет сопровождаться разворотом стрелки на 180 град.
Таким образом, при полете по кругу курсовой угол ДПРМ помогает определить моменты начала выполнения разворотов на круге. В этом плане ДПРМ представляет собой что-то вроде точки отсчета, относительно которой рассчитываются многие действия при заходе на посадку.
К радиостанции также присобачен маркер, или маркерный радиомаяк — передатчик, посылающий вверх узконаправленный сигнал, который при пролете над ним воспринимается самолетными приемниками и заставляет срабатывать индикаторную лампочку и электрозвонок. Благодаря этому, зная на какой высоте следует проходить ДПРМ и БПРМ (обычно это 200 и 60 м соответственно) можно получить две точки, по которым можно построить предпосадочную прямую.
На западе, на аэродромах категории II и III cо сложным рельефом местности на расстоянии 75..100 м от торца ВПП устанавливают еще и внутренний радиомаркер (Inner Marker, IM) (c морзянкой “точка-точка-точка....“), который используется как дополнительное напоминание экипажу о приближении к моменту начала визуального наведения и необходимости принятия решения о посадке.
Комплекс ОСП относится к упрощенным системам посадки, он должен обеспечивать экипажу воздушного судна привод в район аэродрома и маневр снижения до высоты визуального обнаружения ВПП. На практике он играет вспомогательное значение и обычно не отменяет необходимость использования системы ILS или посадочного радиолокатора. Чисто по ОСП заходят только при отсутствии более совершенных систем посадки.
При заходе только по ОСП горизонтальная видимость должна составлять не менее 1800 м, вертикальная не менее 120 м. Если этот метеоминимум не соблюдается, необходимо уйти на запасной аэродром.
Обратите внимание, что ДПРМ и БПРМ на разных концах полосы имеют одну и ту же частоту. В нормальной ситуации, радиостанции на другом конце должны быть выключены, но в симе это не так, поэтому при полете по кругу, АРК часто начинает глючить, цепляя то одну радиостанцию, то другую.

(На фото ПКП-1 Ту-154Б. Красные бленкеры означают отказ командных стрелок — фотография сделана на земле).
Заход по РМС
Также говорят "заход по системе". В общем-то, это то же самое, что и заход по ILS.
В русскоязычной терминологии радиомаячная система посадки (РМС) используется как обобщающий термин, который включает в себя различные разновидности систем посадки— в частности, ILS (Instrument Landing System) (как западный стандарт) и СП-70, СП-75, СП-80 (как отечественные стандарты).
Принципы захода по РМС достаточно просты.
Наземная часть РМС состоит из двух радиомаяков — курсового радиомаяка (КРМ) и глиссадного радиомаяка (ГРМ), которые излучают два наклонных луча (равносигнальные зоны) в вертикальной и горизонтальной плоскости. Пересечение этих зон образует траекторию захода на посадку. Самолетные приемные устройства определяют положение самолета относительно этой траектории и выдают управляющие сигналы на командно-пилотажный прибор ПКП-1 (проще говоря, на авиагоризонт) и планово-навигационный прибор ПНП-1 (проще говоря, на указатель курса).
Если частота настроена правильно, то при подходе к полосе пилот увидит на большом авиагоризонте две перемещающихся линии — вертикальную командную стрелку курса и горизонтальную командную стрелку глиссады, а также два треугольных индекса, обозначающих положение ВС относительно расчетной траектории.
При заходе по ILS, важно запомнить, что лететь следует всегда в сторону командных стрелок. Например, если стрелка глиссады вверху, лететь нужно вверх. Если стрелка курса находится справа, лететь нужно вправо. При правильном маневрировании самолет должен оказаться “на курсе, на глиссаде”, а командные стрелки должны образовать правильный крест.
Если ограничения по максимально допустимым отклонениям по курсу и по глиссаде нарушены, и самолет вышел из допустимого коридора, в кабине должна сработать предупредительная сигнализация.
Не пытайтесь, осуществлять посадку вручную только по ILS — это достаточно сложная задача. Стрелки лучше использовать как вспомогательное средство, а основную часть внимания лучше направить на отслеживание внекабинного пространства. В целом, лететь визуально при четком горизонте и хорошей видимости всегда легче, чем только по приборам, поэтому в тех случаях, когда это возможно, следует больше использовать визуальное наблюдение.
Различают РМС I-й категории (обеспечивающие заход до H=60 м), II-й категории (заход до H=15 м) и III-й категории (до поверхности ВПП и вдоль нее).
Кроме того, заход по РМС делится на две разновидности
1) директорный — т.е. в штурвальном режиме. В этом случае, автопилот – точнее его часть, называемая система траекторного управления (СТУ) – только отображает командные стрелки, а управлением самолетом в процессе снижения по глиссаде занимается экипаж.
2) автоматический — т.е. в автоматическом режиме. В этом случае, экипаж только контролирует захват глиссады автопилотом, а дальше управлением самолетом при снижении по глиссаде выполняет автопилот. Обычно на высоте 60 м его отключают, и переходят на штурвальное управление.
Заход по РСП
Также известен как "заход по локатору"
Выполняется с помощью РСП (радиолокационной системы посадки), которая включает в себя диспетчерский радиолокатор (ДРЛ) для контроля за полетами в районе аэродрома и посадочный радиолокатор (ПРЛ).
Посадочный радиолокатор имеет антену курса и антену глиссады для контроля за выдерживанием воздушными судами правильного положения по курсу и по глиссаде до момента выравнивания. Диспетчер "Посадки" периодически сообщает экипажу положение ВС относительно расчетной траектории, например. "Борт такой-то, курс 275, удаление 8 (км), левее 40 (м), выше 15 (м)", а экипаж старается соответствующим образом корректировать траекторию захода на посадку.
О применении VASI и PAPI
Как уже говорилось, выдерживание глиссады в чисто визуальном режиме на большом самолете — трудная задача даже для опытного пилота, попытка справиться с ней скорее всего приведет к неточному снижению по синусоиде с опасностью преждевременного приземления и т.д.. Поэтому на случай отказов ILS полоса оборудуется различными типами светосигнальных индикаторов глиссады, в частности на западе широко применяются индикаторы типа "Папа" и "Вася".
PAPI (Precision Approach Path Indicator) (на фото) имеет четыре горизонтально расположенных огня. Если все огни белые — идешь гораздо выше глиссады. Один огонь справа красный — идешь чуть выше глиссады. Половина белых, половина красных — идешь в глиссаде. Все красные — идешь гораздо ниже глиссады. Говорят: "All red, you´re dead"
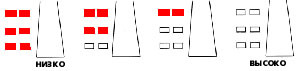
VASI (Visual Approach Slope Indicator) — тоже самое, но состоят из 2x3 (чаще всего) горизонтально расположенных огней (на чертеже).
На случай, если забыл, что когда, для VASI существуют такие классические поговорки:
"Red over red, you´re dead"
"Red over white, you´re all right"
"White over white, you´ll fly all night"