

Мотор-колёса и поворот поезда
На протяжении многих последних лет конструкция традиционных колёсных пар подвижного состава железных дорог не претерпела принципиальных изменений.
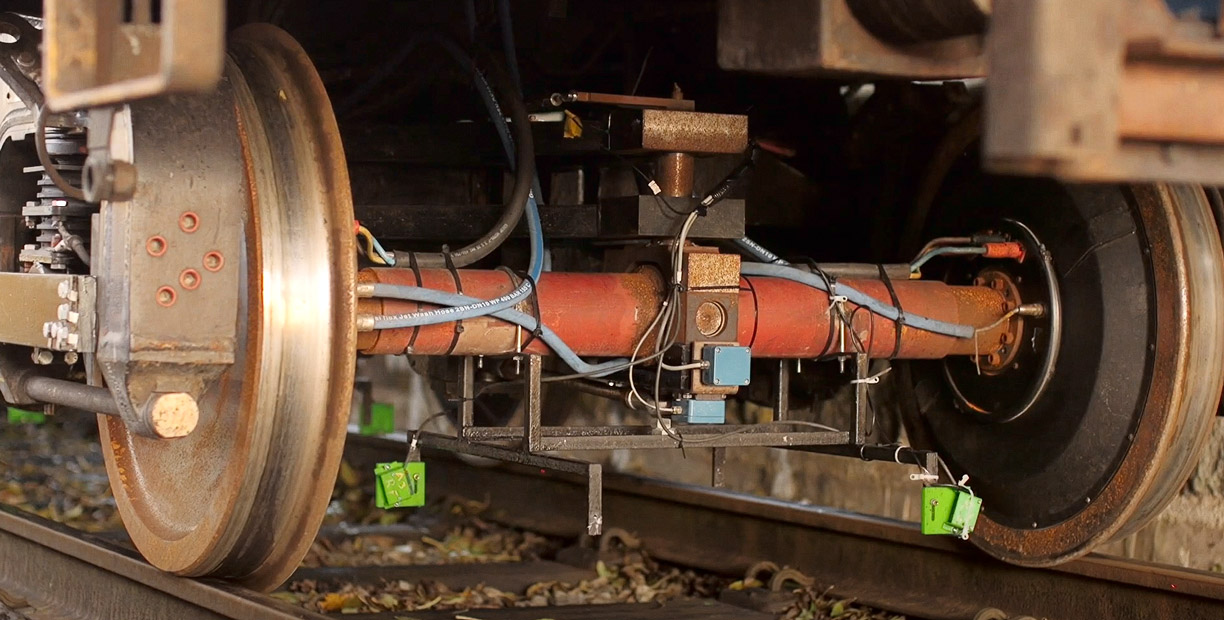
Колёсная пара состоит из цельнометаллической оси и напрессованных на нее колес с конической поверхностью катания.
Как известно, на повороте внешнее колесо проходит больший путь, чем внутреннее.
Поэтому поверхность катания делают конической: на плавных поворотах колесные пары по инерции смещаются к внешнему рельсу, и колесо катится по нему той зоной, где его радиус больше.
Несмотря на свои преимущества, это решение не лишено недостатков.
Для колесной пары традиционной конструкции существует ограничение по минимальному радиусу проходимой кривой.
В кривой малого радиуса гребень колеса прижимается к внешнему рельсу, что сопровождается сильным скрежетом и проскальзыванием другого колеса колёсной пары.
В результате возникают повреждения поверхностей катания, увеличивается боковой и вертикальный износ головок рельсов, а также износ колёс.
Кроме того, приходится искать компромисс между жесткостью рессорного подвешивания и устойчивостью колесной пары, так как она склонна к вилянию, что негативно сказывается на динамических качествах подвижного состава и увеличивает износ рельсов.

Попытки применить колесные пары с независимо вращающимися колесами предпринимались и ранее, но без надежной системы управления гребни независимых колес легко входят в контакт то с наружным, то с внутренним рельсом.
В основе тягового привода Acti-Wheel — встроенный в ступицу колеса синхронный двигатель с возбуждением от постоянных магнитов.
Масса двигателя — 40 кг.
Поскольку необходимость установки редуктора между двигателем и колесом отсутствует, удалось снизить массу тележки почти на 2 т.
Система Acti-Wheel была испытана на переоборудованном вагоне, ранее эксплуатировавшемся на линии District лондонского метрополитена и ныне принадлежащем компании Vivarail.

Одновременно повышается эффективность торможения за счет того, что каждое колесо вагона обмоторено и управляется индивидуально.
Мотор-колёса со встроенными в них компактными двигателями позволяют разогнать поезд массой 40 т до скорости 140 км/ч и затем остановить его при помощи рекуперативного торможения.
Для подвижного состава с питанием от аккумуляторов это будет означать заметное увеличение пробега без подзарядки либо возможность установки аккумуляторов меньшей емкости, что способствует уменьшению суммарной массы подвижного состава.

Управление каждым колесом осуществляется независимо.
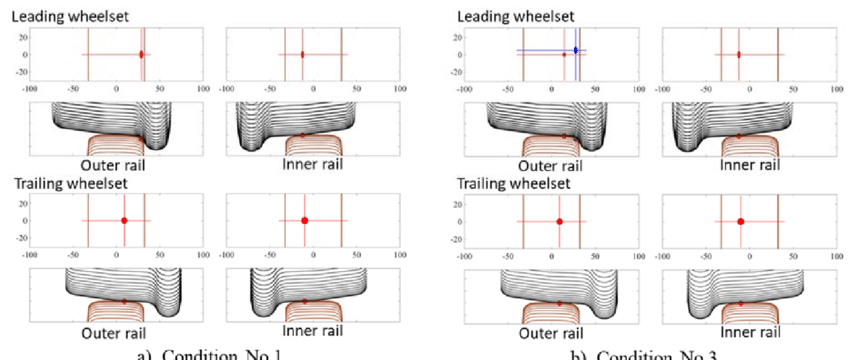
Для контроля положения колес относительно рельсов, радиусов кривых и других параметров колеса и тележки оборудованы датчиками.

На основании полученных от них данных компьютер вычисляет скорость, необходимую для того, чтобы каждое колесо сохраняло оптимальное положение относительно рельса.
При этом величина изменения скорости, как правило, незначительна, поэтому существенных изменений крутящего момента двигателей не требуется.

Технология Acti-Wheel–достаточно сложная система управления, а усложнение любой технической системы всегда повышает риск ее отказа.
Предложенная система пока находится в стадии экспериментов и не готова к широкомасштабному использованию.
Мощность двигателя не сообщается.
От себя добавлю, думаю, что большую мощность передать при небольших габаритах вряд ли возможно, а отказ от отдельной системы тормозов небезопасен.
Когда искал материал по мотор-колёсам для железной дороги, обнаружил, что таковые достаточно успешно применяются для современных трамваев, где и радиусы поворотов и нагрузки поменьше.
Да и вообще, есть много нестандартных решений компоновки тягового привода.
Тут тип привода – безредукторный, основанный на применении в данном случае тягового асинхронного двигателя типа мотор-колесо, использован при производстве трамваев семейства Variobahn(Variotram), выпускавшихся компаниями Adtranz/Bombardier, а несколько лет назад переданных для производства компании Stadler (Швейцария).
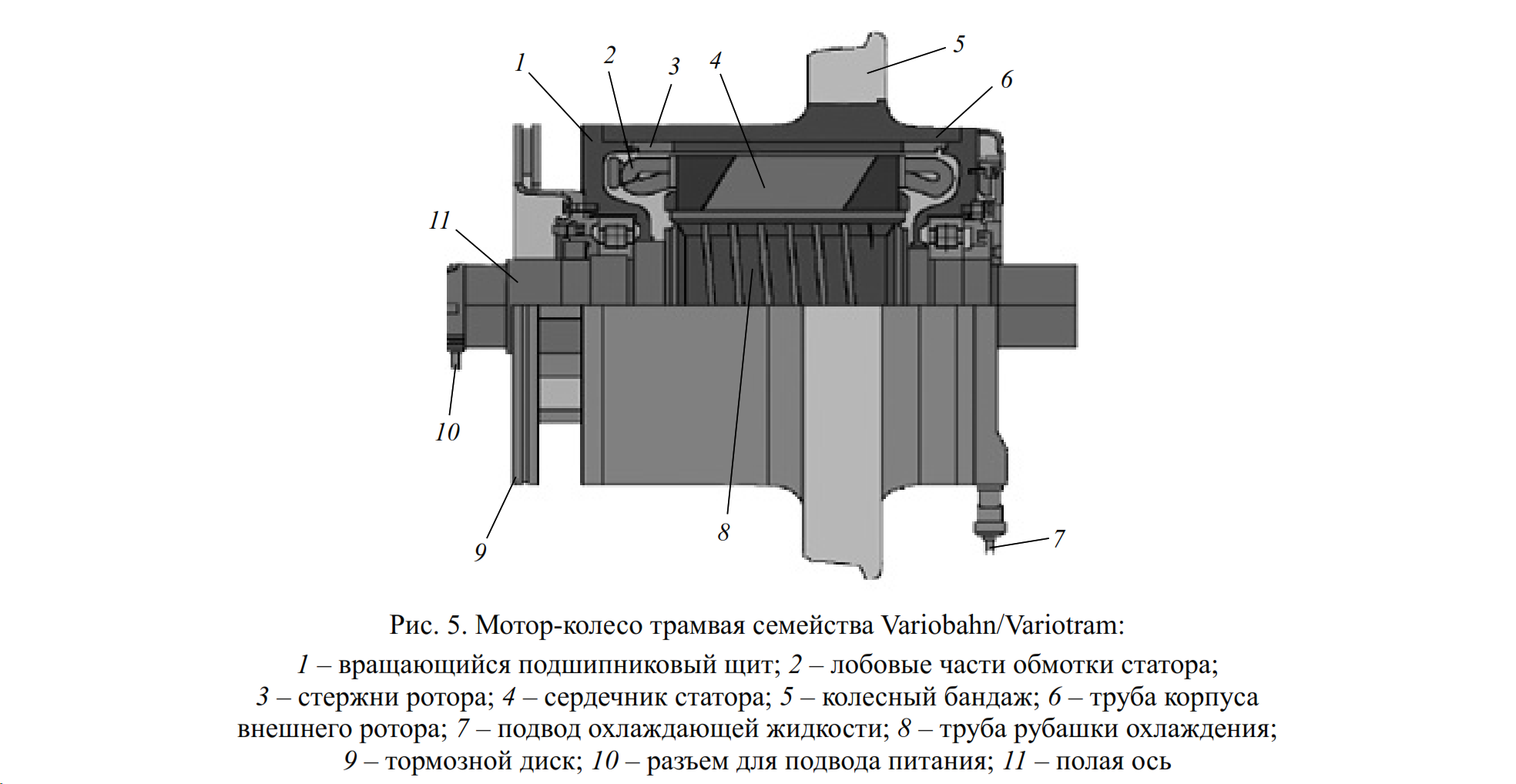
Безредукторный привод выполнен в виде трехфазного восьмиполюсного асинхронного двигателя мощностью 35…45 кВт цилиндрического исполнения с
внешним ротором, совмещенным с движущим колесом, и внутренним статором с
жидкостным охлаждением.
К недостаткам конструкции является увеличение неподрессоренной массы.

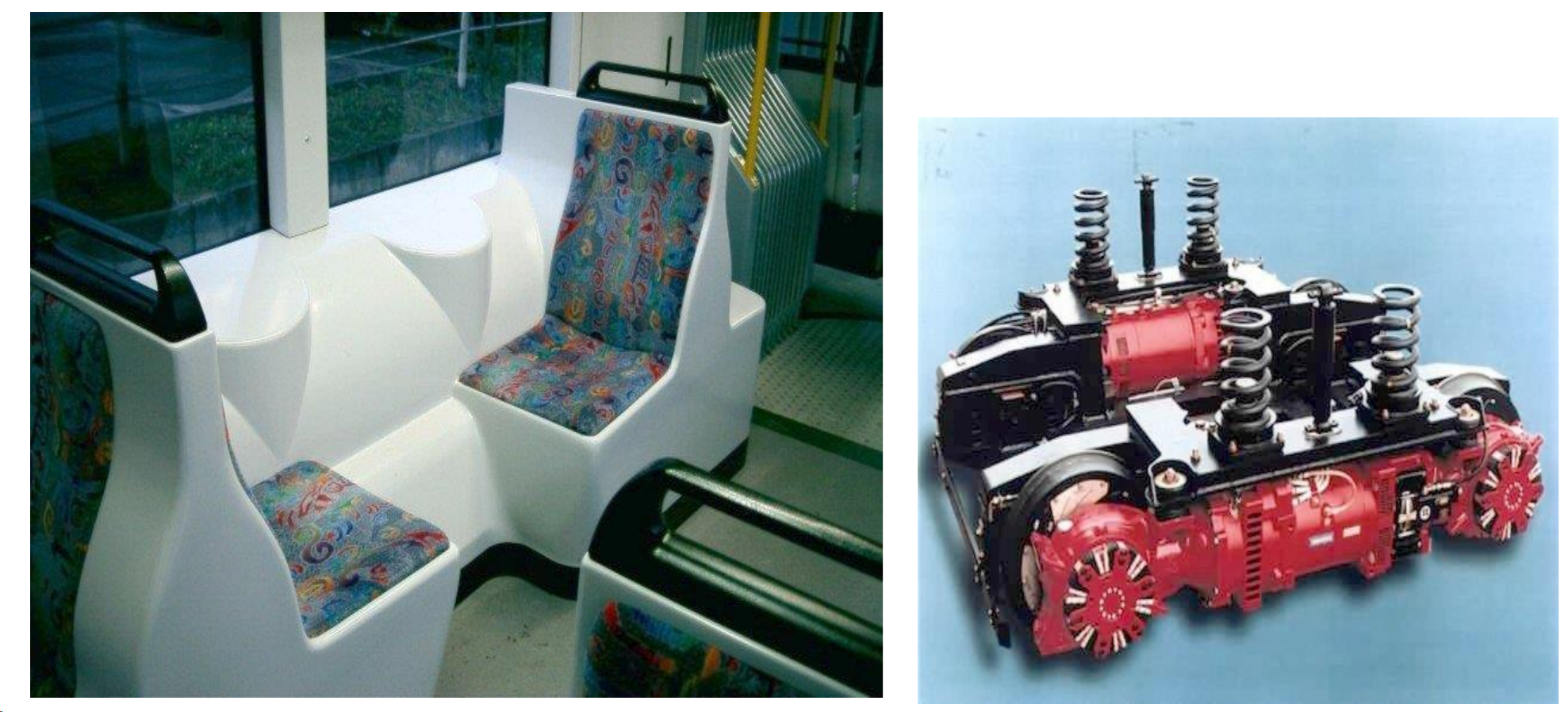
Хотя тут и ещё один плюс для трамваев–низкий уровень пола, который сейчас практически обязателен, поэтому и тележки современных трамваев смотрятся достаточно необычно с "железнодорожной" точки зрения.
Вот например Siemens Combino.
На тележке с обеих наружных сторон размещаются два групповых привода "один двигатель на два колесных центра", каждый со своей стороны.
Двигатели мощностью 100 кВт размещены продольно и с обеих концов передают момент на тяговые редукторы с коническими зубчатыми передачами, а те, в свою очередь, передают момент через упругие муфты на колесные центры.
К недостаткам привода относится более высокая сложность производства и ремонта, особенно в сравнении с непосредственным приводом, и, по сравнении с последним, также более высокий уровень шума.
Выступающие с боков тележки муфты могут быть легче повреждены при наезде на случайные предметы, оказавшиеся в габарите пути, что чаще случается на городской линии, особенно совмещенной с проезжей частью улицы.
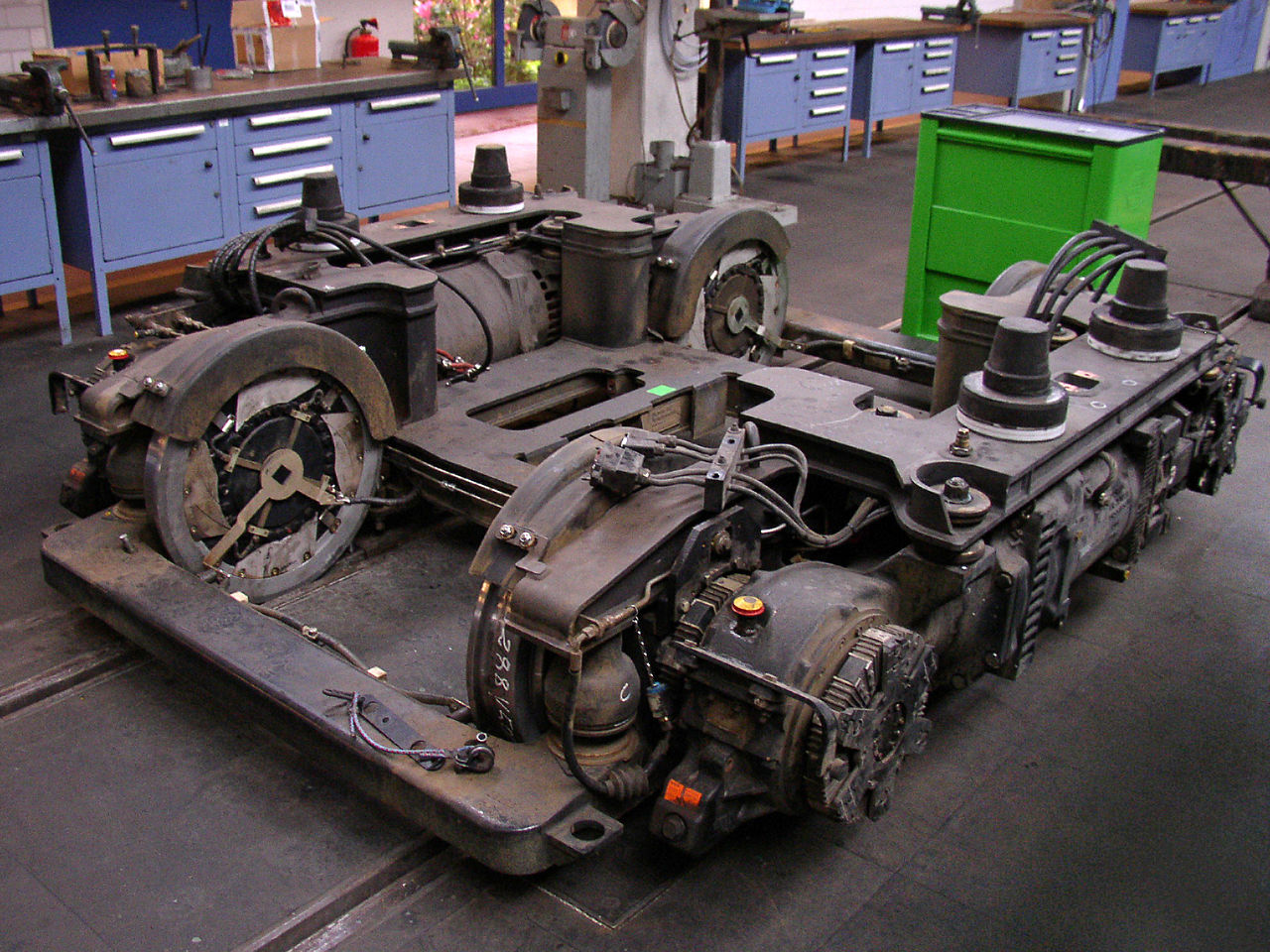
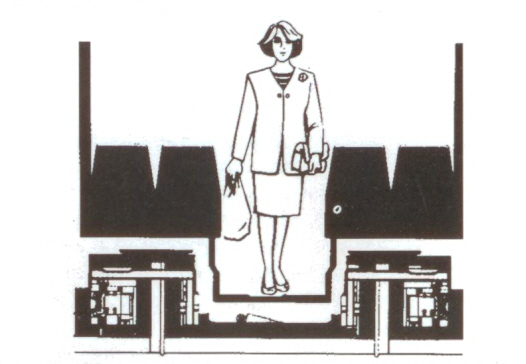
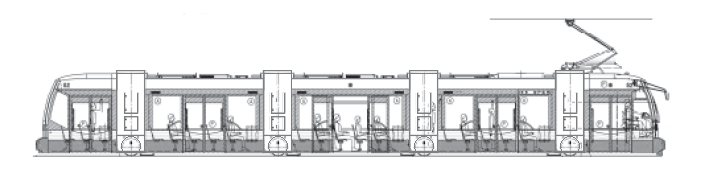
Последним этапом, реализованным в 2004–2006 годах концерном Siemens, является создание трамвая серии ULF(Ultra Low Floor) с предельно низким уровнем пола (200…210 мм).
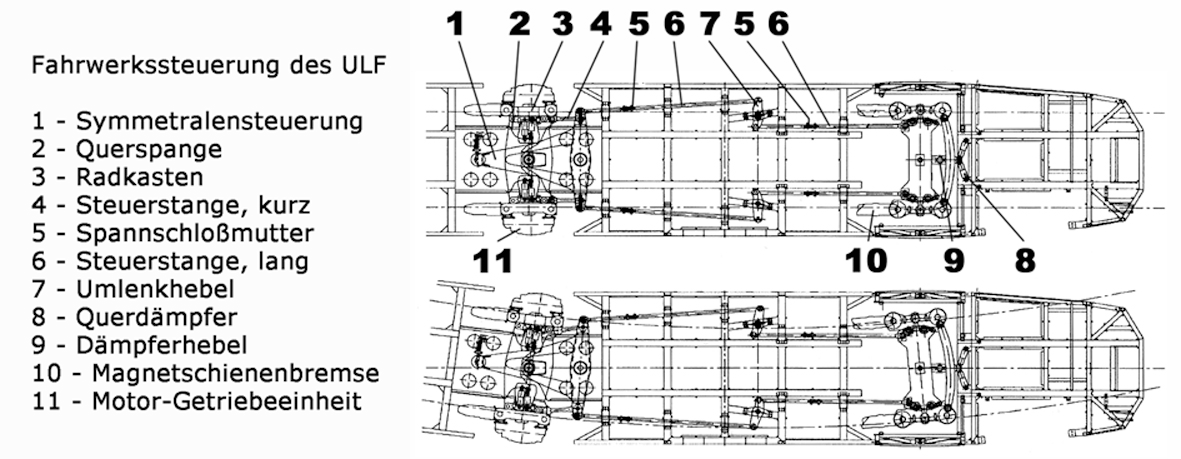
Отличительной особенностью трамваев данной серии являются одноосные тележки портального типа с независимо вращающимися колесами, расположенные между секциями трамвая.
Колесо с каждой стороны приводится отдельным двигателем, размещенным вертикально, через конический редуктор.

Отказ некоторых заказчиков от дальнейшего пополнения парка трамваями типа ULF в пользу вагонов более традиционной компоновки был объяснён сложностью технического обслуживания трамваев этого типа, из-за чего до четверти всего парка регулярно простаивало в ожидании ремонта.

Для передней и хвостовой секции была разработана система, при которой секция помимо тележки в сочленении опиралась на собственную одноосную тележку.
Кинематическая связь тележек была обеспечена рычажной передачей.
Вообще, тема обширная и интересная, с трамваями я практически не знаком (знакомлюсь в процессе), поэтому комментарии приветствуются.)
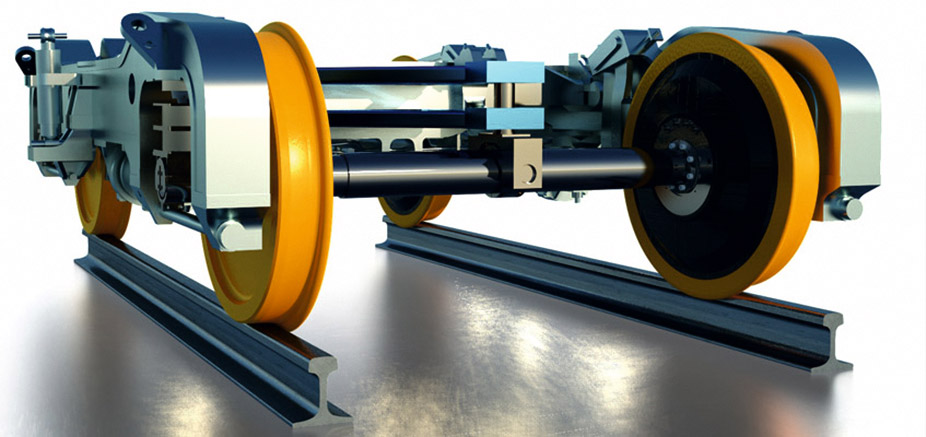
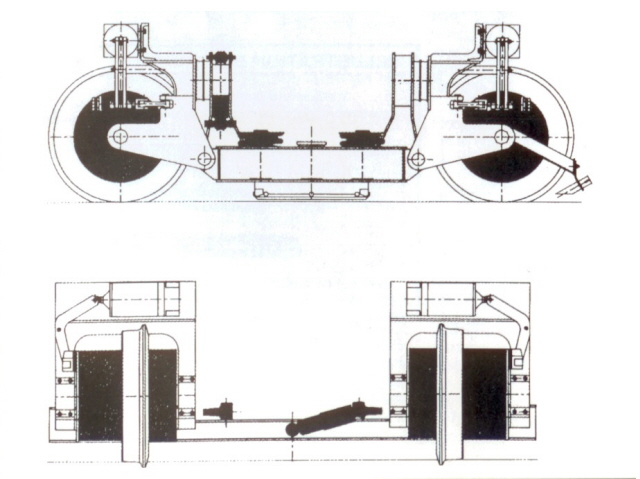
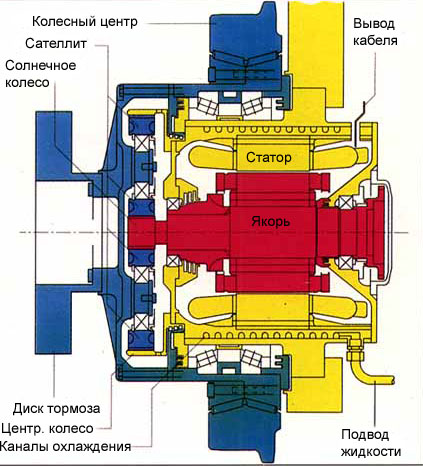
Тележка трамвая Cityrunner фирмы Bombardier.
В этом случае тяговый привод выполнен в виде мотор - колёс с планетарным редуктором для снижения габаритов и массы привода.
Колесный центр с подрезиненным бандажом представляет собой вращающийся цилиндрический корпус, опирающийся через пару конических роликовых подшипников на статор двигателя.
К корпусу также прикреплен тормозной диск.
Мощность двигателя 45 кВт, с жидкостным охлаждением.
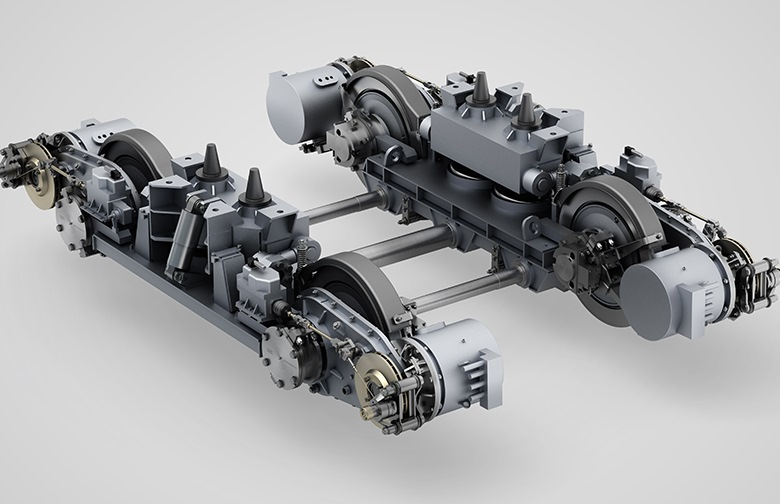
перспективная тележка неосуществлённого проекта R1
Железная дорога
4.3K поста6.7K подписчиков