Постоянно выключается светильник с датчиком движения in Home. Решение
Купил светильник МД-1565 с микроволновым датчиком движения и поставил в предбаннике между квартирами. Лампа (светильник) включалась четко, но через минуту работы выключалась и секунды 3 ее никакими движениями нельзя было включить. Изначально это не вызывало огромных неудобств, поскольку в том коридоре нужно было просто пройти. Но когда начался ремонт и по этому коридору ходило много людей, надо было таскать мебель и складывать материалы, тут то лампа и выбесила. Постоянно несешь что-нибудь и на пол пути лампа выключается и приходится стоять в темноте изображая активное движение для появления света.

Такой светильник.
Для дальнейших махинаций необходима разборка лампы. Колпак ее вклеен в корпус на герметик, поэтому без распиливания ее не разобрать. Внутри лампы стоит LED драйвер EG2300, на отдельном модуле расположена микросхема микроволнового датчика KU5532, создающая задержку микросхема 5323R 3s-60s (по моим догадкам), линейный стабилизатор на 4,4В 7544 и т.д.
Производителем заложена работа лампы только в темное время суток, от этого она реагирует и на собственный свет, поэтому после истечения 60сек работы лампа вынуждена выключиться для получения возможности детектирования движения и дальнейшего включения. Эту функцию можно отключить, убрав фотоэлемент с платы датчика.

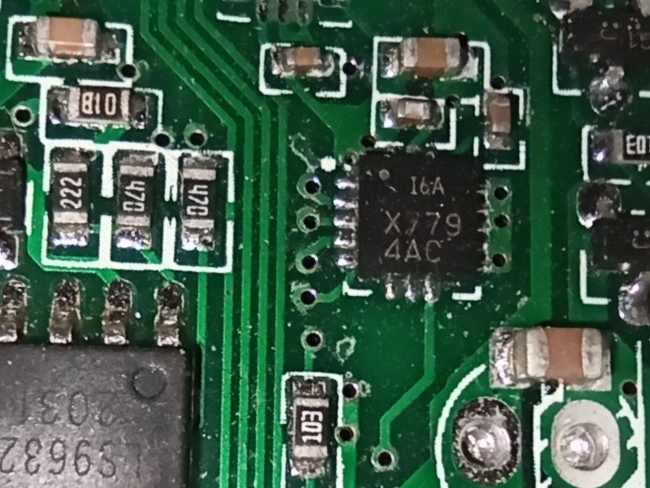
фото делал по ходу работы, поэтому флюс не отмыт
После удаления фотоэлемента лампа все равно будет выключаться по истечении 60сек, поскольку микросхема, отвечающая за задержку, обратит внимание на входящий в нее сигнал (с микросхемы датчика движения) только после ~3сек от момента выключения. Для устранения этого недостатка необходимо собрать схему задержки.
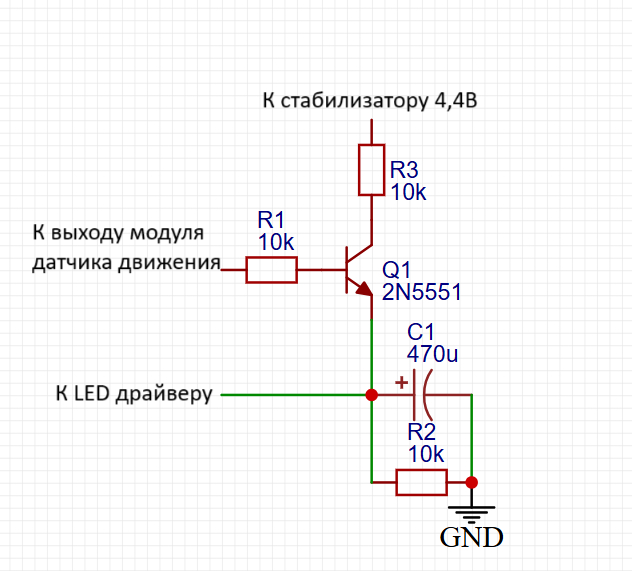
Схема задержки сигнала.

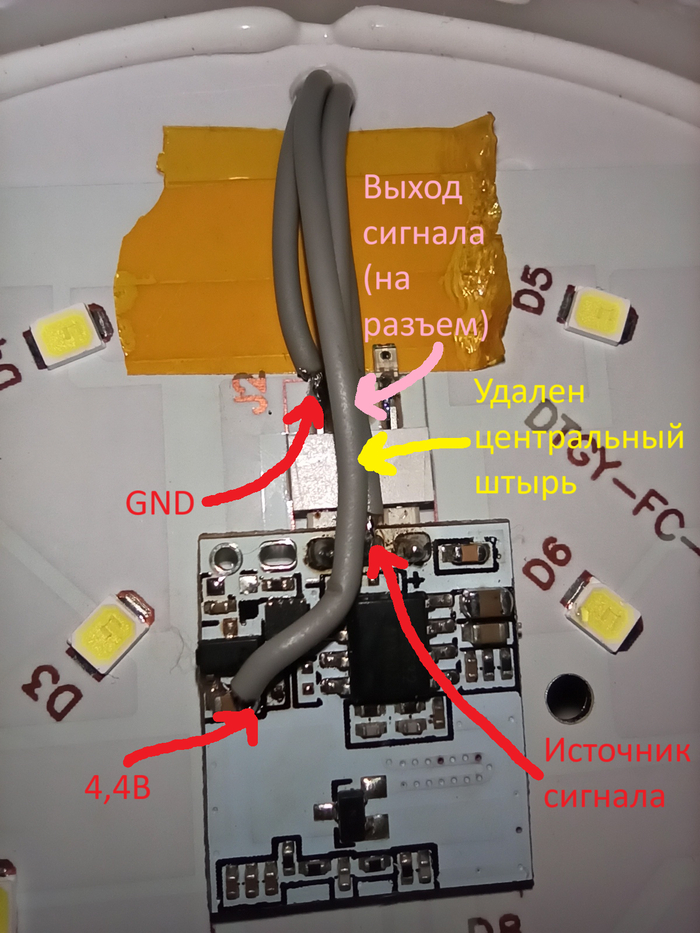
Подключение схемы.
С данным дополнением лампа не будет постоянно выключаться, но включение будет происходить с плавным нарастанием яркости (во время заряда С1), а во время осуществления задержки яркость лампы будет плавно снижаться (разряд С1), сигнализируя о скором выключении если не будет обнаружено движение.
Изменение яркости лампы можно убрать, использовав компаратор. Далее я изложу принцип работы лампы для тех, кто захочет сам поэкспериментировать.
Драйвер светодиодов выдает слаботочные дежурные 5в (колебание напряжения этой линии не проверял), от которых питается модуль датчика. На нем установлен стабилизатор на 4,4В, от которого он (модуль) запитывается. При обнаружении движения микросхема датчика выдает сигнал на таймер, который включается при отсутствии освещенности (мониторится фотодатчиком). Движение есть и темно, значит таймер выдает логическую единицу (4,4В) на вроде вторую ногу драйвера и тот включается. После включения выхода таймера, он перестает смотреть на входной сигнал. По истечении 60сек таймер выдает лог 0 (0В) и еще ~3 секунды не обращает внимание на свой входной синал и далее по новой.
Дежурное питание 5в очень слаботочное, это надо учитывать. Думаю стоит делать задержку по медленному заряду конденсатора, а не по его разряду как сделал я.
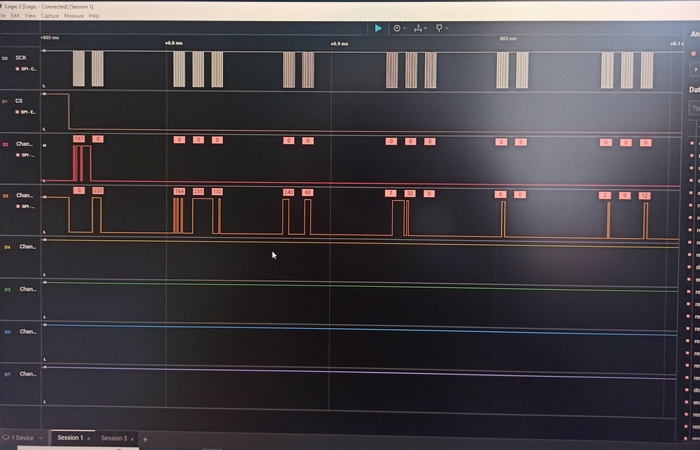
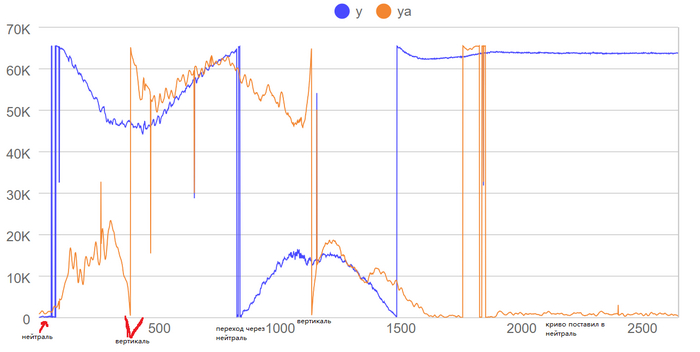
Драйвер по управляющему сигналу переходит из состояния в состояние (вкл-выкл и наоборот) резко. Вкл -> выкл <410мВ, Выкл -> вкл >470мВ. Этим же сигналом яркость лампы плавно изменяется в диапазоне от этих ~0,5В до 4,4В.
Выход таймера имеет пуш-пул каскад (переключается между плюсом и минусом питания), этот выход через резистор 1кОм подключен к разъему модуля.