Летательный пост №6 Моторы и их контроллеры!
Итак, продолжаем. Сегодня поговорим о моторах и о том, что заставляет их крутиться.

Как обычно, сначала небольшой экскурс в теорию. В первую очередь стоит отметить, что мы говорим именно о электромоторах. ДВС коптеры вообще говоря бывают, но я пока видел только такие здоровые дуры размахом далеко за метр.

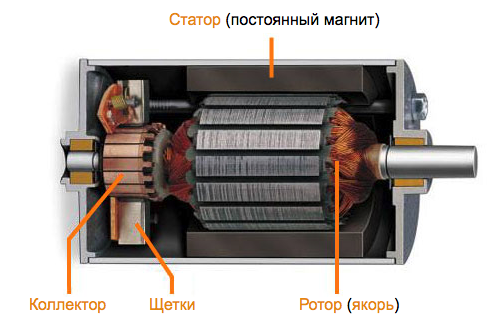
Базовые физические принципы работы таких моторов очевидны: вращать магнитным полем магниты, или токи, ничего другого не изобрели. Соответственно в моторе можно выделить 2 части: на одной из них закреплены магниты (варианты без магнитов присущи довольно мощным двигателям, типа тех, что ставят в дрели), вторая генерирует магнитное поле посредством электрического тока. Ну и в рабочем режиме эти части друг относительно друга вращаются. В одну из частей надо воткнуть провода с электричеством, иначе ничего работать не будет. Очевидно, что такая часть будет жестко закреплена в корпусе аппарата и вращаться относительно него не будет. Такую часть называют СТАТОРом. В противовес ей, то что крутится - РОТОР. Перепутать сложно.
Дальше начинается интересное. Если магниты с сопутствующей фигней (корпус, ярмо и прочее) закреплены на статоре, то такой мотор будет называться коллекторным из-за наличия так называемого щеточно-коллекторного узла. Он необходим для передачи тока с проводов, втыкаемых куда-то в статор, на ротор и выполнения ряда сопутствующих функций.
На роторе располагаются штуки, которые с точки зрения школьной физики можно окрестить “рамкой с током”. А на такую рамку в магнитном поле будет действовать некий, момент (читай сила), который будет стремиться повернуть ее в строго определенное положение.
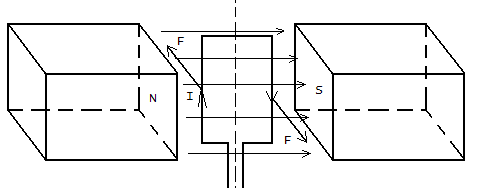

где B - вектор магнитной индукции, I - ток, S- площадь рамки, betta - угол между вектором магнитной индукции и плоскостью рамки.
Так что как только мы подключим напряжение к нашему мотору, через щетки на коллектор оно подастся к ротору, там образуется наша рамка, которая начнет вращаться в магнитном поле. Вот она занимает устойчивое положение и что дальше? Дальше вступает в действие наш коллектор, т.к. ротор с коллектором провернулись, то щетки касаются коллектора уже в другом месте и в нашу старую рамку ток не течет. А в том новом месте находятся контакты от следующей рамки, на которую подается напряжение и которая опять начинает вращаться в магнитном поле. Дойдет до равновесия - и контакт автоматом съедет на следующую. Рамок много, но в каждый момент времени ток течет лишь через ту, что обеспечивает максимальный момент сил. Вот так и вертимся в строго определенном направлении от постоянного тока. Сменили полярность - сменили направление вращения. Скорость вращения регулируем напряжением. Все очень просто, никакой сложной управляющей электроники. Такие моторы дешевы и имеют нормальную мощность даже на малых оборотах и крайне удобны в использовании. Их ставят на дешевые модели коптеров. Из минусов - ухудшение характеристик по мере старения магнитов и (что наступает на порядки быстрее) износ щеток. Сами понимаете, когда у вас кусок меди (реже карбона) трется о быстро вращающийся другой кусок меди ничего хорошего ждать не приходится. Побочный эффект - выброс медной / углеродной пыли от изнашивания щеток. Но это уже проблема аппаратов другого класса. Так, например, не рекомендуют использовать строительные пылесосы для бытовых уборок ( а жаль, они сосут и воду и камни и стоят не так дорого) именно по той причине, что у них как правило нет фильтров для удерживания пыли от щеток. Это не страшно при ремонте, но неприятно при регулярном домашнем использовании.
Поэтому в летных кругах ценят моторы другого типа - бесколлекторные ( они же б/к, б/щ, безщеточные). В этом случае магниты закреплены на роторе, а наши рамки (которые мы тут будем пожалуй называть катушками) наоборот на статоре. А раз на статоре, то и никакие щетки им не нужны, провода можно прям к ним и подключать. Подали мы ток на катушки, магниты оп и повернулись в направлении суммарного вектора тока по сути.
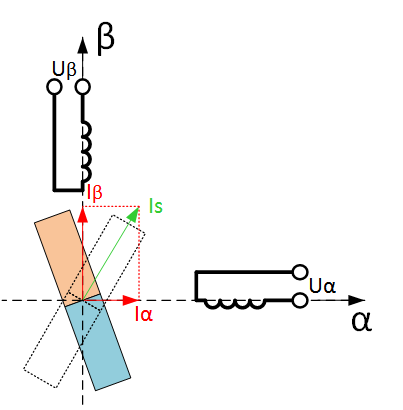
А максимальная сила, раскручивающая магнит, будет действовать, если этот самый вектор мы будем к магниту держать под углом 90 градусов. Постоянно держать. Это примерно соответствует синосуидальному напряжению на каждой катушке для нашего рисунка и равномерного вращения. Тогда по сути магнит будет притягиваться с одной стороны и толкаться с другой. Но вот беда, для того, чтобы держать ток под 90 градусов нам епть нужно знать положение магнита! Иначе хрен его знает, успевает он там поворачиваться, или мы уже обогнали его пару кругов. Для решения поставленных задач в серьезных двигателях используются датчики положения ротора и схемы векторного управления. Но в маленьких и не слишком мощных моторах это стрельба из пушки по воробьям. Поэтому схему несколько упростили. Оставили всего 3 фазы на весь набор катушек (рассмотрим далее вариант из 6 катушек). В каждый момент времени включены 4 штуки. 2 тянут, 2 толкают. Форму импульса заменили с синуса на трапеции и просто поочередно подают напряжение на требуемые пары катушек. А вместо нормального датчика положения слушают напряжение с оставшихся катушек. Ведь мотор от генератора ничем не отличается, и если вращать магнит рядом с катушкой, то в ней будет возникать индукционный переменный ток. А как только полюс магнита пройдет мимо катушки, то этот ток сменит направление (фаза пересечет 0) - эту информацию и можно использовать вместо полноценного датчика. Минусы подхода - пока довольно сильно не раскрутишь двигатель - ЭДС индукции будет мизерным и будет тонуть в шумах. Поэтому на старте приходится тупо от фонаря переключать катушки в надежде, что там все успевает, а нормальная синхронизация подключается, когда ЭДС достигает рабочих значений. Пожалуй одна из самых больших неприятностей - словить рассинхрон в полете.
Если кто-то визуально информацию воспринимает лучше, чем мои каракули, вот вам видео на языке потенциального противника:
После прочтения вышеизложенного вы должны были понять, что если для увеличения скорости вращения коллекторного мотора достаточно было просто увеличить напряжение, то тут такой номер не пройдет. Тут вообще для того, что бы хотя б 1 оборот совершить потребуется нехилый такой набор электроники. Для этого созданы специальные платки - контроллеры б/к моторов, electronic speed control, или ESC. Они служат связующим звеном между мозгами коптера и моторами. Таким образом мозгу достаточно указать как быстро должен крутиться мотор, а контроллер уже сам выдаст нужные токи на нужные катушки. Бывают модели, позволяющие контролировать сразу несколько двигателей, но чаще все-таки встречаются версии для контроля всего одного. Более того, существуют моторы, в которые эти контроллеры сразу и встроены, но пока это тоже скорее исключение.
Давайте посмотрим на них.

С одной стороны esc подключаются тремя проводами к мотору (тут они синие). Если коллекторные моторы обычно помечают как вращающиеся по часовой/против часовой, то с б/к такого разделения нет, и моторам и контроллерам сугубо фиолетово куда вращатся, направление можно изменить тупо поменяв местами любые 2 провода из 3х. Т.к. заранее определить куда у вас будет вращаться мотор невозможно, то обычно напрямую моторы и esc не спаивают, а делают разъемные коннекторы.
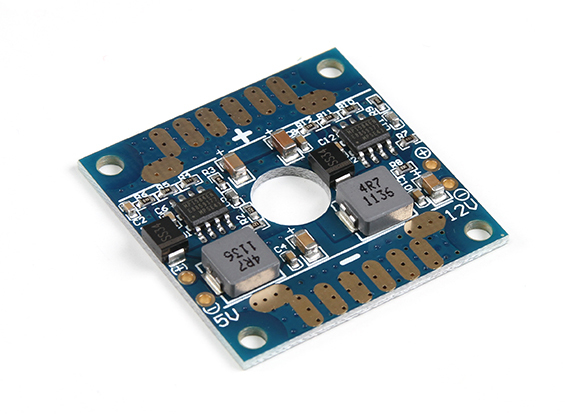
Пара толстых проводов идет напрямую к батарее, ну точнее к плате развода питания. Батарея подключается к ней, а от нее уже все цивильно расползается по каждому уголку вашего дрона.
Причем чем напрямее - тем лучше. Каждый гребанный см уменьшает срок жизни вашего контроллера, а точнее входного конденсатора на нем. Это связано с таким явлением как индуктивность. Немного школьного курса физики:
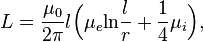
Чем больше длина l - тем больше индуктивность провода. Укорачиваем как можем.
Данный факт подтверждается рядом исследований проведенных производителями. Вывод: лучше удлиняйте провода между esc и мотором, чем между esc и батареей. Альтернативный вариант - дополнительные емкости на входе, но там уже нужны ВЫЧИСЛЕНИЯ, если вы это читаете, то скорее всего этот способ не для вас.
Через оставшийся шлейф контроллер общается с мозгами коптера (ну или можно напрямую в ресивер воткнуть, если у вас самолет к примеру. На нем в обязательном порядке будет черный провод - земля и еще один на противоположенном конце коннектора - для передачи сигнала. Иногда встречается еще третий, красный, идущий по центру. С ним забавная история.
Когда я собирал свой первый коптер, я перелопачивал документацию по полетным контроллерам. Как официальные, так и инструкции на разных форумах/сайтах от простых ребят. Глаза мне резала фраза, независимо встретившаяся у трех различных человек. Что дескать при сборке не забудьте перерезать красный провод у всех esc кроме одного. "Да ну, бред какой-то", подумал я, решив, что это какие-то старые инструкции от старых esc и вообще авторы не в себе. Ну кому придет в голову необходимость отрезать провода в 2015 году у фабрично выпускаемых устройств. Разъем на три провода втыкается в ответный разъем на три штырька. И тут вдруг перерезать... Полез читать официальную документацию на один из новых контроллеров полета. "В случае, если вы хотите оставить средний провод на всех esc, не забудьте припаять диоды на средние ножки" гласила инструкция. Какой-то жидо-массонский заговор красных проводков, решил я и полез разбираться.
Дело в следующем. Мозги коптера нужно чем-то питать. Делать это можно двумя различными способами. Первый - с платы, что изображена выше. Это не просто плата, там еще и преобразователь, выдающий 5В от любой батарейки специально для этих целей. Это наилучший вариант. Но не все платы разводки питания такое умеют. Поэтому питание можно брать из другого источника, который гарантированно воткнут в батарейку - esc! Некоторые esc имеют встроенный BEC (Battery Elimination Circuit) и умеют подавать те самые 5В на среднюю ногу (если не умеют, то и третьего провода у них нет). И все (ну ладно, насчет совсем всех не гарантирую) мозги умеют от этих разъемов запитываться. И вот до тех пор, пока на каждой средней ноге ровно 5В все хорошо, ток течет куда надо. Но вот мы решили наклонить коптер и пара моторов стала крутиться быстрее остальных. А значит через одну пару esc к моторам потек больший ток, чем через вторую. И тут электротехническая магия: в дешевых реализациях BEC напряжение на среднем проводе начинает меняться в зависимости от протекаемого через esc к моторам тока. Не то что бы прям сильно, в пределах допустимого по нормам питания. Но на двух соседних средних штырьках теперь разное напряжение. А если есть разность напряжений, то там начинает течь ток. А никто никогда не предполагал, что ток там будет течь, ибо esc от мозга через другой esc запитывать не собирался. И рано или поздно у вас что-нибудь сгорит. Поэтому запитывайте мозги от внешнего bec с тотальным обрезанием (покупкой esc без bec), или оставляйте только один красный центральный провод. Как процедуру кастрации сделать легкой и обратимой - ищите на ютубе, там можно отжать штырек.
Помимо наличия/отсутствия bec можно выделить еще некоторые отличия разных моделей.
- В первую очередь это максимальный ток. Чем больше ток, тем дороже esc. Подбирать надо под конкретный мотор с небольшим запасом.
-Входящее напряжение. Ну там от 2s и выше, лучше бы с поддержкой 4s.
-Поддержка Oneshot125. Это обновленный протокол связи между мозгами и контроллером мотора. Увеличивает частоту обновления параметров, что должно выливаться в более стабильный и контролируемый полет. Протокол должен поддерживаться как мозгами, так и контроллером мотора и его прошивкой.
-Собственно прошивки. Для мультироторов актуальны Simonk и BLHeli. Продаются как уже прошитые, так и с возможностью перепрошивки / настройки через программатор. От авиационных отличаются более резвым изменением числа оборотов, что есть хорошо.
Вне зависимости от всего вышеперечисленного, любые esc после сборки коптера надо откалибровать. Это необходимо для того, что бы при одинаковых сигналах от мозга они выдавали одинаковые обороты. Процедура проводится со снятыми пропеллерами и подробно описана в инструкции к вашему полетному контроллеру и контроллеру моторов.
Вернемся к моторам. Выбор мотора - натуральнейший геморрой, о характеристиках производители врут как дышат. Причем ошибаться могут в обе стороны. Информацию приходится выискивать по youtube каналам и форумам. И хорошо, если это адекватные таблицы с результатами испытаний, а не:

Кхм, к конкретике! Рассмотрим пример: DYS BE1806-2300kv Brushless Multirotor Motor 2S~3S

Specs:
Rpm/V: 2300kv
Dimensions: 23 × 21mm
Shaft: 2mm
Voltage: 2S~3S (7.4v to 11.1v)
Weight: 24g
Watts: 89W
Max Current: 8A
Suggested Prop: 5x3(3S 11.1v) ~ 6x2 (2S 7.4v)
Motor Mount Holes: M2 x 12mm /16mm
Тип мотора: outrunner/inrunner. Обычно не указывается, легко определяется визуально. У первых крутится половина корпуса, у вторых только торчащий из корпуса штырь.
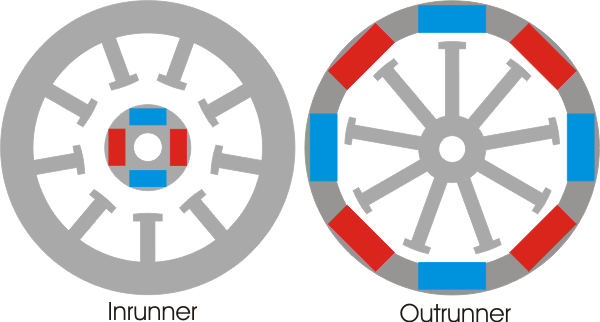
Обычно outrunner'ы имеют лучшее охлаждение и более актуальны для коптеров.
Размер мотора. Размер состоит из четырех цифр. В нашем случае 1806. Это означает, что диаметр СТАТОРА 18 мм. Вторые две цифры как-то связаны с высотой мотора. Кто пишет, что статора, кто ротора. Я, вооружившись линейкой так и не нашел, какой физический объект ей точно в моих моторах соответствует. Ближе всего - высота катушек в статоре. Иногда через слеш указывают с понтом число магнитных полюсов. Так что опирайтесь на первые две цифры. Совместимость с ними обычно указывается на выбранной вами раме. Если это 250 коптер, то скорее всего вам надо 18 (реже 22), если 450 - то скорее всего 22.
2300kv - ниже в спеках указано, что это число оборотов на каждый приложенный вольт. Не врут. Для 250 коптеров ориентир - 2000-3000, для 450х 800-1000.
2мм - диаметр оси. Ну вдруг вы ее поменять там захотите, или крепление под пропеллер свое прицепить.
2S~3S (7.4v to 11.1v) - поддерживаемые батарейки. Ложим болт и лезем на форумы. В 80% случаев производители на всякий случай занижают. Люди вполне себе летают и с 4s на таком моторе. Греется, но не перегорает. Разумеется, лучше искать те, что официально держат 4s.
24g - вес
Watts: 89W - бесполезная информация в отрыве от используемой батареи и пропеллера.
Max Current: 8A Вообще говоря аналогично предыдущему, но глядя сюда можно оценить примерно какой ток должен держать выбираемый к мотору esc.
Ну и остались рекомендуемые пропеллеры и крепежные отверстия.
Перечисленного выше должно хватить для грубой оценки пригодности мотора для ваших условий. Ориентир от 10А на 250 квадрик, от 20 на 450. Смотрите по весу и желаемому результату. Не брезгуйте чужим опытом.
Теперь о чем производители часто умалчивают (но не все). Вас интересует таблица, в которой будут данные по мощностям, тяге и потребляемым токам для 2s, 3s, 4s и для каждого типоразмера предполагаемых пропеллеров. Для этого добрые дяди на форумах и ютубах держат специальные стенды и тестируют разные моторы в одних и тех же условиях. И только так можно реально оценить окончательную мощность вашей сборки. Это уже для более осмысленного выбора. Сюда же можно отнести качество организации охлаждения и балансировки мотора. Хорошие производители перед продажей моторы балансируют, плохие - как повезет. Поэтому на дорогих моторах вы точно полетите, дешевый китайский ноунэйм возможно придется доработать напильником, в прямом смысле. Хотя многие летают и не жалуются.
М... Вроде все. Про пропеллеры и сопутствующие вещи запилю отдельно.
