


Ледяные горы на Плутоне
Видео, которое доносится до нас с расстояния в шесть миллиардов километров от Земли: насладитесь полетом над ледяными горами Плутона.


Из чего делают колеса для космоса
Космические программы различных стран предполагают не только полеты человека в космос и его высадку на ближайших к Земле планетах и спутниках, но и транспортировку разной исследовательской техники, чьей задачей является сбор данных об иных мирах. К таковым относятся не только спутники, но и различная колесная техника вроде автономных роверов, высаженных на Луне и Марсе. Но так как среда на этих планетах сильно отличается от земной, колеса для луноходов и марсоходов сделаны по-иному принципу. Рассказываем…
Высадка на Луну
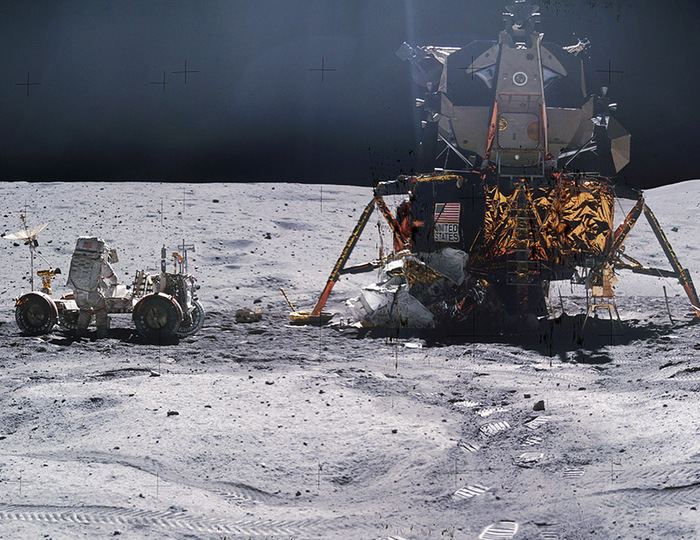
По состоянию на сегодняшний день Луна является единственным астрономическим объектом, на котором побывал человек. Это достижение стало результатом миссии «Аполлона-11» – американского пилотируемого корабля, в ходе полета которого с 16 по 24 июля 1969 года жители Земли впервые в истории совершили посадку на поверхность другого небесного тела. Это сделали астронавты Нил Армстронг и Эдвин Олдрин, которые оставались на лунной поверхности 2 часа 31 минуту 40 секунд.
Предтечей события стала успешная посадка советской исследовательской автоматической межпланетной станции «Луна-2», а также беспилотный облет земного спутника автоматической межпланетной станцией «Луна-3», сумевшей сфотографировать обратную сторону планетоида.

В результате данных экспедиций было установлено, что атмосфера и гидросфера на Луне практически отсутствуют, а поверхность спутника представляет собой смесь тонкой мелкодисперсной пыли и скалистых обломков, называемых реголитом, которые образовались в результате столкновений метеоритов с лунной поверхностью. Подобные ударно-взрывные процессы способствовали взрыхлению и перемешиванию грунта, одновременно спекая и уплотняя его частицы. Толщина слоя реголита составляет до десятков метров.
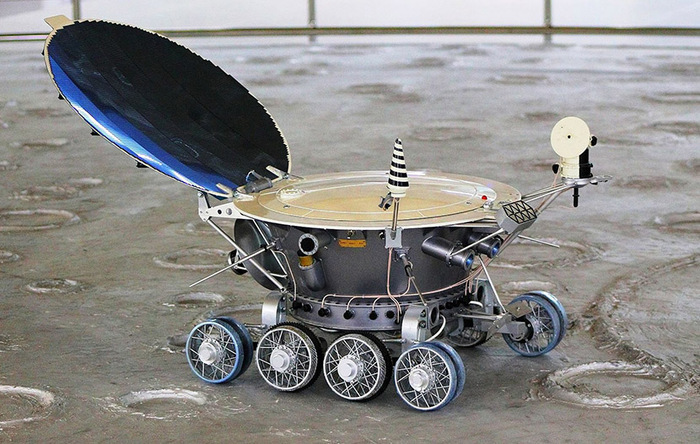
На основе полученной информации Научно-производственное объединение имени Лавочкина разработало конструкцию первого в мире планетохода, который был успешно доставлен на поверхность земного спутника 17 сентября 1970 года. Аппарат под названием 8ЕЛ № 203, также известный как «Луноход-1», был предназначен для изучения особенностей лунной поверхности, радиоактивного и рентгеновского космического излучения на спутнике, химического состава и свойств его грунта. Он проработал 302 суток и проехал 10.540 метров, после чего связь с аппаратом прервалась.

В 1971-м автоматическая межпланетная станция «Луна-21» доставила на спутник Земли «Луноход-2». За четыре месяца работы он прошел 42 километра (это расстояние оставалось рекордным до 2015 года, когда его превзошел марсоход Opportunity), передал на Землю 86 панорам и около 80 тысяч кадров телесъемки, но его дальнейшей работе помешал перегрев аппаратуры внутри корпуса.
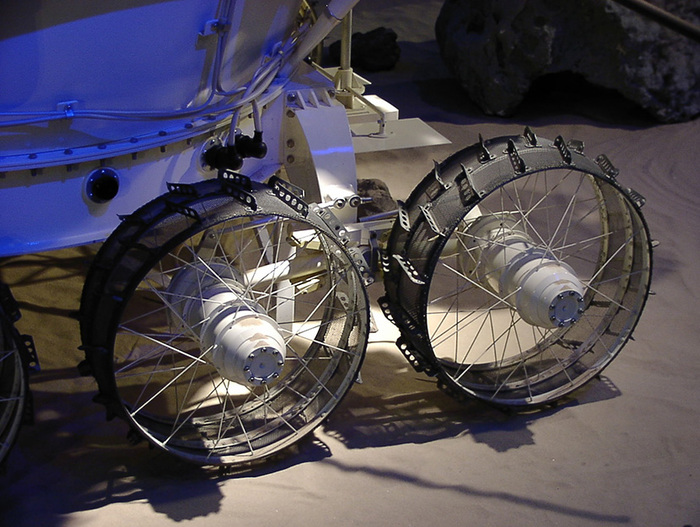
Колеса обоих аппаратов состояли из трех титановых ободов, покрытых сеткой из нержавеющей стали и соединенных грунтозацепами. При этом сами колеса работали независимо друг от друга и не соединялись мостами. Такая конструкция оправдывала себя и была разработана с учетом борьбы с непреодолимыми препятствиями: в случае столкновения с таковым неспособное дальше двигаться колесо просто отбрасывалось, а луноход продолжал свое движение. К слову, данная способность ни одному советскому луноходу так и не пригодилась.
Любопытно, что каждое колесо данной техники имело собственный автономный электродвигатель, энергию для которого вырабатывали бортовые источники – полониевый радиоизотопный тепловой генератор и солнечная батарея на внутренней стороне крышки лунохода. Разворачиваясь, крышка одновременно открывала радиатор, необходимый для охлаждения приборов в герметичном контейнере.
Лунный ровер
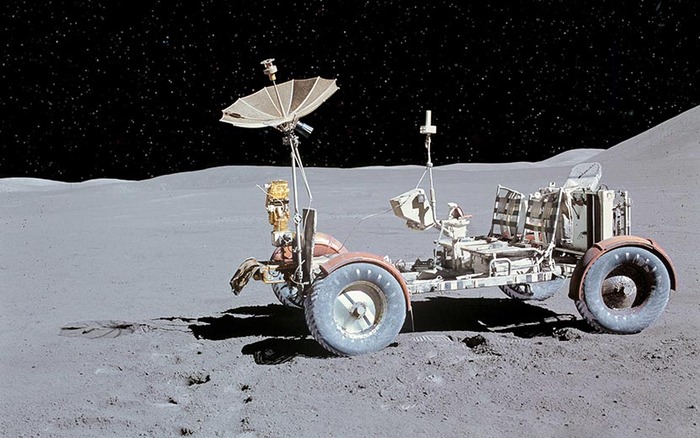
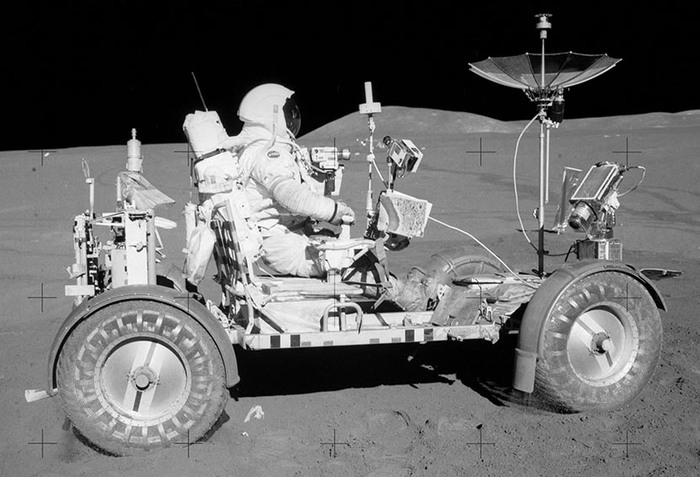
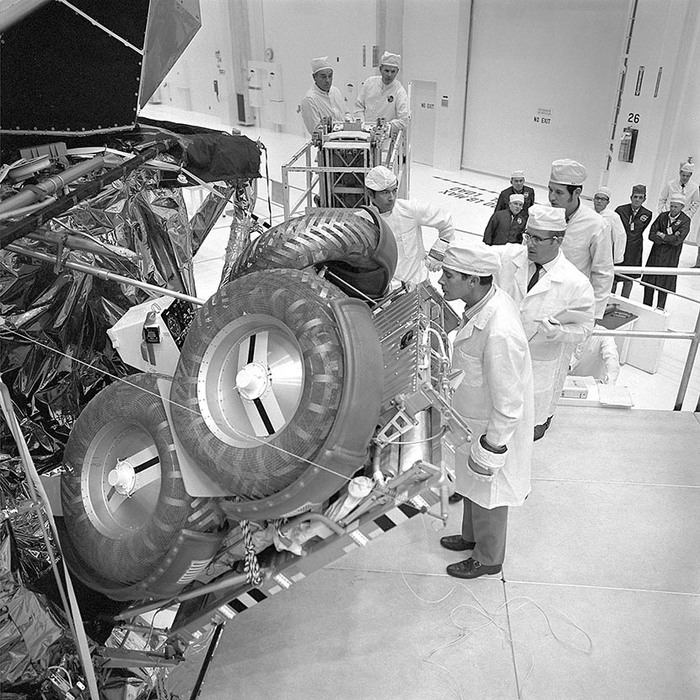
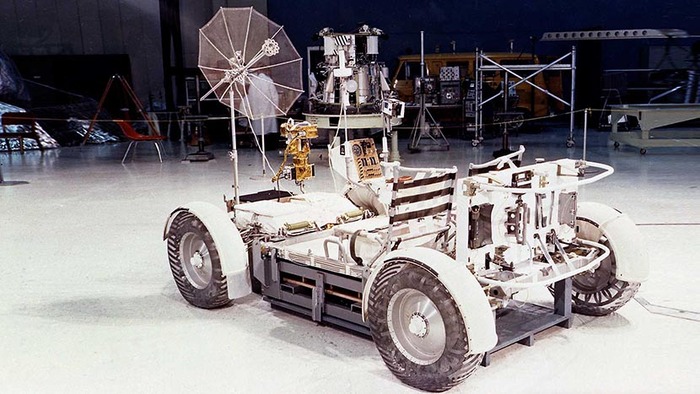
Во время успешных экспедиций «Аполлон-15», «Аполлон-16» и «Аполлон-17», предпринятых американцами, данный вездеход, называвшийся Lunar roving vehicle, или LRV, использовался для более развернутого исследования местности. Этот транспорт представлял собой четырехколесный планетоход на электротяге, рассчитанный на двух пассажиров. Сконструировал его Ференц, а генеральным подрядчиком выступила компания Boeing.
Этот лунный электромобиль весил 210 кг и мог в условиях силы тяжести земного спутника перевозить груз в 490 кг. Рама его шасси достигала в длину 3 метра (колесная база – 2,3 м) и была сварена из алюминиевых труб.
Американский луноход оснащался четырьмя тяговыми двигателями постоянного тока производства Delco (по одному на каждое колесо) мощностью 190 Вт при совершаемых оборотах до 10.000 в минуту. В роли источника электроэнергии выступали две серебряно-цинковые батареи напряжением 36 вольт и емкостью 121 А*ч каждая. К слову, ввиду примитивности технологии по сравнению с современностью эти батареи не заряжались. Зато конструкция предусматривала возможность питания от этих элементов устройства связи или телекамеры. Кроме того, батареи и вся электроника были подключены к системе пассивного охлаждения.
При таком оснащении средняя скорость LRV по лунным ландшафтам составляла 13 км/ч. Однако это не было пределом возможностей данной техники: в ходе экспедиции «Аполлон-16» был установлен рекорд скорости передвижения по Луне, составивший 18 км/ч. Сами участники экспедиции признали, что такая скорость оказалась чрезмерной для спутника с иной силой притяжения, ведь малейший наезд на препятствие сопровождался сильной тряской и взбиванием больших фонтанов лунной пыли.
Также отметим, что максимальное удаление LRV от лунного модуля из соображений безопасности ограничивалось ресурсами индивидуальных систем обеспечения астронавтов, которых должно было хватить для пешего возвращения к модулю в случае поломки луномобиля. В итоге максимальное расстоянии во время экспедиций «Аполлон-15» и «Аполлон-16», преодоленное этим транспортом, составило 28 и 27 км соответственно (в обе стороны). В ходе этих исследований и лунный автомобиль, и скафандры астронавтов показали свою надежность, так что данное ограничение было смягчено. Во время экспедиции «Аполлон-17» это позволило группе исследователей удалиться от лунного модуля на максимальное расстояние 7,6 км, а общая протяженность пути составила 36 км, что до сих пор является рекордом среди планетоходов, пилотируемых человеком.
Покрышки для космоса
Колеса луномобиля были разработаны компанией General Motors. В основе их конструкции применялся алюминиевый диск, на который устанавливалась своеобразная покрышка диаметром 810 мм и шириной 230 мм. Она была выполнена из плетеной стальной проволоки (волокон) толщиной 0,84 мм с цинковым покрытием. При этом около половины площади такой покрышки занимал специальный титановый протектор для обеспечения более надежного контакта с грунтом. Над колесами луномобиля также устанавливались пылевые щитки, которые неоднократно доказывали свою эффективность, не позволяя экипажу и органам управления техники покрыться за считаные минуты мелкодисперсной пылью.
Данная технология полностью оправдала себя, ведь использовать традиционный при изготовлении колес каучук за пределами нашей планеты возможностей не было. Температурные перепады на поверхности Луны составляют от -170°C до +120°C, а дополнительное высокоэнергетическое радиационное излучение еще больше ускоряет деградацию резиновых элементов. Словом, выдержать длительное использование вне условий Земли никакая резина не может.

Также лунный автомобиль был оборудован собственной системой радио- и телевизионной связи. На его борту имелась остронаправленная сетчатая параболическая антенна для прямой связи с Землёй, а также ненаправленная антенна. На борту были установлены цветная телекамера, 16-миллиметровая кинокамера, а также 70-миллиметровая фотокамера, для которых имелся запас пленок в кассетах.
Интересно: цветная телевизионная камера с 6-кратным объективом-трансфокатором, установленная на луномобиле, была оснащена электроприводом для поворота в горизонтальной и вертикальной плоскостях и изменения фокусного расстояния, благодаря чему ею могли управлять не только астронавты, но и оператор с Земли. Это значительно расширило возможности видеосъемок и даже позволило заснять старт лунного модуля с Луны. Для выполнения такой съемки луномобиль пришлось заранее оставить на спутнике в нужной позиции и на таком расстоянии от модуля, чтобы в поле зрения его телекамеры он попадал целиком.
Детали: для второго пришествия американцев на спутник Земли спроектирован луноход VIPER, цельнометаллические колеса которого успешно прошли все тесты на симуляторе имитации лунного грунта. Учеными моделировалось передвижение по разным склонам и камням, проскальзывание колес – всего было применено 196 различных сценариев. Луноход VIPER разработан Исследовательским центром Эймса и будет использоваться для поиска полезных ископаемых и водяного льда в затененных областях Южного полюса Луны. Его планируют доставить на поверхность спутника спускаемым модулем Griffin в конце 2023 года.
***
Вот такое получается занимательное материаловедение во внеземных условиях. Надеемся, вам было интересно. В следующем материале на эту тему мы расскажем об особенностях колес марсоходов.
Показать полностью
10

О РАЗМЕРЕ
...который в ряде случаев, по-видимому, всё же имеет значение.
Я имею в виду не нынешнюю новость насчёт прощания россиян с "Виагрой" — мол, поставок больше не будет, производства из иноагентских ингредиентов больше не будет; хватит лениться, дальше эрегируйте сами, как хотите!
Я имею в виду рендер со сравнительными размерами космических кораблей. Впечатляет.


Инверсионный след от попутного самолёта
Инверсионный след возникает при температурах за бортом -40 и ниже. Это не химические распыления, как считают некоторые сторонники теории заговора. Водяной пар собирается в компрессоре и замерзает сразу на выходе из двигателя.
Кстати на видео играет трек моей группы SAHALIN-Я сегодня улетаю
Показать полностью

Как космические корабли стыкуются с МКС
“Парковка по звуку” – не вариант, когда дело касается скоростей под 30 тыс км/ч. Сближение корабля с Международной космической станцией происходит по четкому сценарию, но даже в нем есть место для небольшой импровизации.
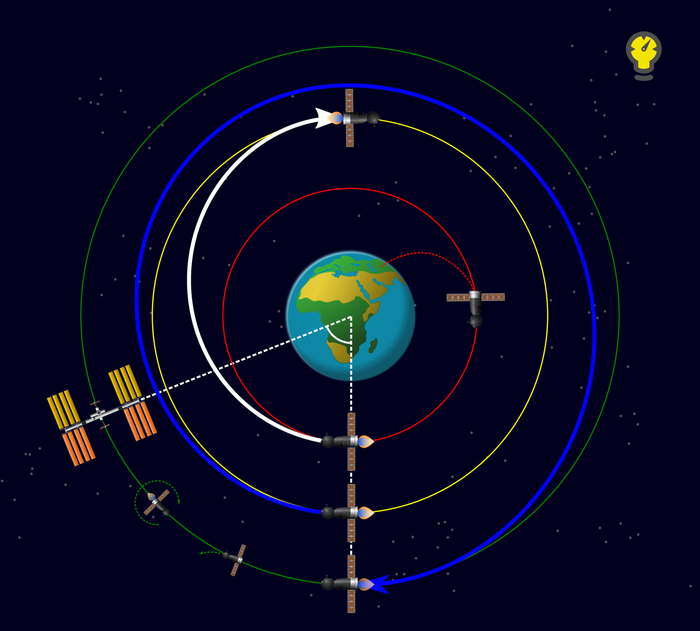
1. Ракета-носитель доставляет корабль на орбиту выведения примерно в 200 км над Землей. Он летит со скоростью 27000 км/ч, чуть медленнее, чем МКС. Время запуска ракеты рассчитывают так, чтобы на момент стыковки станция была хорошо освещена и видна космонавтам.

2. Корабль поднимается выше с помощью маневра, известного как гомановский переход. Двигатель включается два раза. Первый импульс выводит аппарат на новую высоту по эллиптической траектории. Второй позволяет остаться на этой высоте и занять круговую орбиту.

3. Орбита фазирования (желтый) располагается на высоте примерно 300 км, скорость здесь равняется 27800 км/ч, как у МКС. На этой промежуточной орбите корабль дожидается идеального расположения по отношению к станции. Говоря точнее, верного фазового угла.

4. Фазовый угол — это угол между орбитальными радиусами, на которых находятся станция и корабль. К примеру, если корабль летит прямо под МКС, угол равен нулю. Радиус орбиты фазирования меньше, чем орбиты станции, поэтому при равных линейных скоростях двух аппаратов угловая скорость корабля выше. Чтобы добиться идеального положения, достаточно просто подождать.
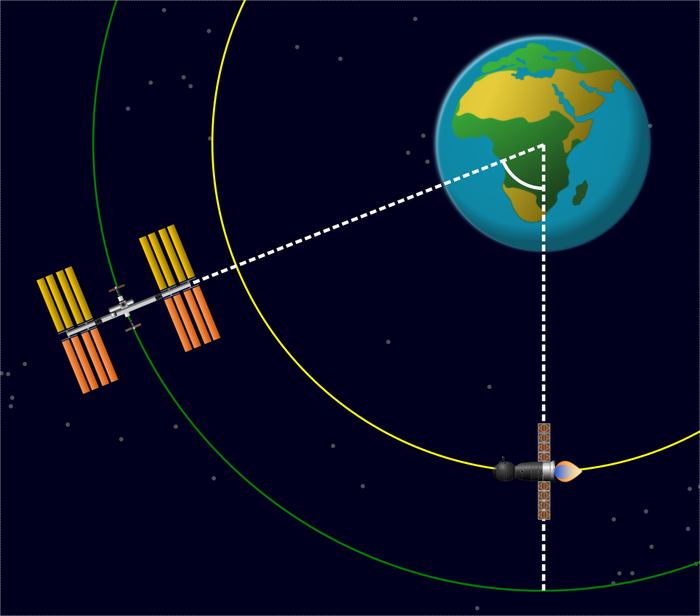
5. Дождавшись идеального фазового угла, корабль переходит на орбиту МКС (зеленый, приблизительно 400 км). Гомановский переход для этого недостаточно точен, поэтому используют другой маневр — биэллиптический переход с тремя включениями двигателя.

6. Корабль движется по орбите на 200 км/ч быстрее МКС, стремительно догоняя станцию. Чтобы избежать столкновения в случае неудачного торможения, корабль уводят чуть в сторону с помощью маневрового двигателя.
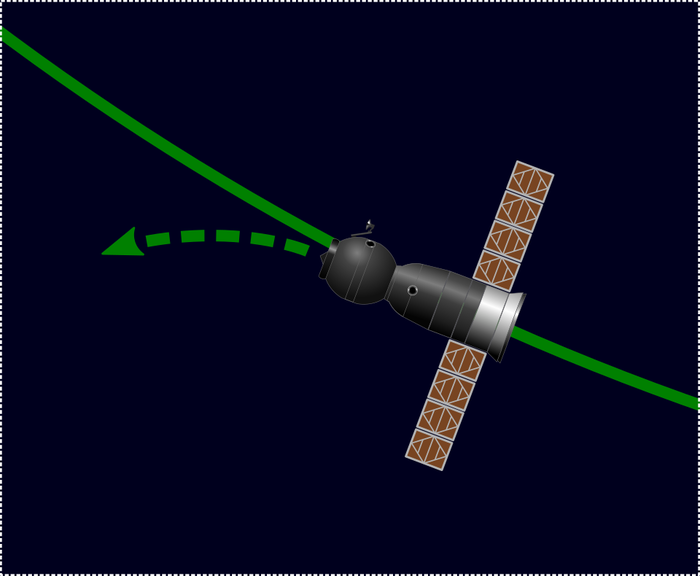
7. Когда до станции остается менее 200 км, корабль быстро разворачивается на 180 градусов и включает основной двигатель, чтобы затормозить. Сравняв скорость с МКС, аппарат разворачивается обратно.

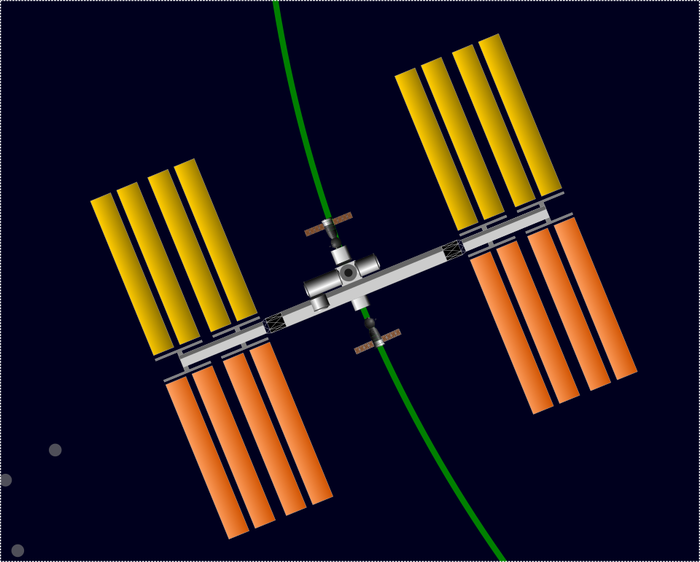
8. За 180 км до станции радарная система “Курс” захватывает МКС. Маневровыми двигателями управляет компьютер, и стыковка проходит в полностью автоматическом режиме. Однако при необходимости командир может включить ручной режим и взять управление на себя.
пост уже был на пикабу, но скорее всего подписчики сообщества не видели его.
Познавательные посты и ролики о том как устроены вещи, как работают и как сделаны публикуются в сообществе Как это сделано , присоединяйтесь, там много интересного!
Показать полностью
9

Ракета с руками

18 марта 1965 года советский космонавт Алексей Леонов совершил первый в мире выход в открытый космос, перевернув новую страницу в истории космонавтики. Спустя менее трех месяцев, 03 июня 1965 года это повторил американский космонавт Эдвард Уайт. Дальше — больше. Однако, хоть работы в открытом космосе и превратились из подвига в обыденность, менее опасными и менее простыми они не стали.
Космонавту угрожает опасность столкновения с микрометеоритами или космическим мусором. Любое серьезное повреждение скафандра грозит разгерметизацией и практически неизбежной смертью. Космонавт может оторваться от корабля и затеряться в космическом пространстве. Спасти его в этом случае также почти невозможно. Длительные и сложные манипуляции в многослойных скафандрах требуют от космонавтов высочайшей квалификации и физической подготовки.
Поэтому неудивительно, что в НАСА довольно быстро задумались о том, чтобы облегчить жизнь работникам орбиты. На волне моды на роботизацию всего и вся возник проект по оснащению каждого космического корабля и станции одним или несколькими вспомогательными аппаратами, которые бы помогали космонавтом во время работ в открытом космосе, а в идеале и вовсе бы их заменяли. Эдакие дроны-помощники, в лучших традициях современной фантастики.

В 1971 году был дан старт проекту Free Flyer по разработке телеуправляемых миниракет, оснащенных манипуляторами, которые смогли бы избавить космонавтов от многих трудных или опасных задач, выполняемых на орбите.
Предполагалось, что такой дрон будет иметь форму коробки 1.2х0.9х0.8 м и снаряженной массой около 180 кг. Каждый дрон оснащался как минимум двумя сложными манипуляторами с 7 сочленениями. При необходимости манипуляторы могли заменяться другим оборудованием. Также имелось как минимум три камеры. Главная, на выдвижной стреле спереди и две вспомогательных на манипуляторах. За перемещение дрона в пространстве отвечали 16 направленных разные стороны миниатюрных двигателя на гидразине.
А почему гидразин, а не пневмо например... ведь было бы гораздо экологичнее (для испытаний в лаборатории) да и в кино видали. Разгадка проста — 50 лет назад топлива на гидразинах были очень широко распространены, особенно у военных, и работать с ними, скажем так, не боялись и умели. Минус у гидразина существенен — его чрезвычайная токсичность, но на этом минусы на тот момент заканчивались. А среди плюсов есть возможность использовать его в качестве однокомпонентноого топлива, в том числе и для маломощных двигателей. В общем, удобно, практично, дёшево и всё для него уже есть.

Если желаете углубиться в вопрос, вот хорошая хабростатья.
Такой дрон предполагалось по умолчанию загружать в грузовой отсек каждого шаттла и применять по мере надобности.

Экспериментальный образец дрона.
Отдельно хочется сказать пару слов про манипуляторы. Дрон планировалось оснастить манипуляторами модели M-12, разработанными на основе протеза «Золотая рука» — механизированного ортеза для рук, разработанного в 1965 году мединститутом Rancho Los Amigos, Inc. Впоследствии велись работы по созданию полноценного протеза, полностью заменяющего руку и управляемого нейросигналами нервной системы. Увы, не давшие на то время ощутимого результата. Однако сам ортез был очень популярен в США на фоне всплеска заболеваемости полиомиелитом.
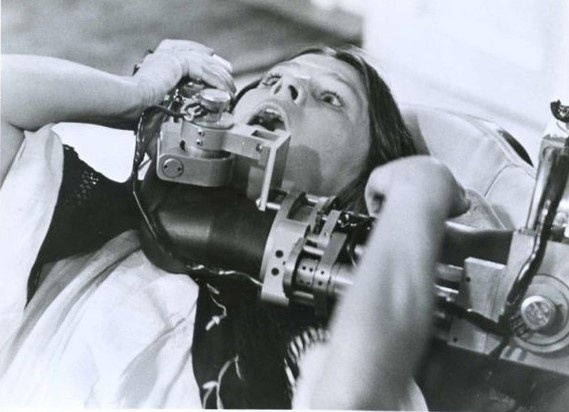
В середине ХХ века полиомиелит был настоящим бичом в ШтатахВакцину от него придумали в конце 1950-х, а до этого времени довольно обыденным явлением были подобные картины:

Лос-Анджелес, 1950-е. Пациенты с осложнениями полиомиелита часто становятся парализованными настолько, что не могут дышать самостоятельно. В те времена их аппараты ИВЛ выглядели так.
Менее тяжёлые последствия «всего лишь» вызывали паралич и атрофию мышц конечностей. И тогда на помощь людям приходили первые «экзоскелеты» — ортезы.
Ортез даже успел сыграть одну из главных ролей в фильме.

В 1972 году были начаты испытания экспериментального образца дрона, во многом не менее интересные, чем сам дрон. В испытательном центре Textron Bell Aerospace (Буффало, штат Нью-Йорк) была смонтирован испытательный бокс размером 145 кв. м. Дрон закреплялся на мобильной платформе на воздушной подушке, которая с минимальным сопротивлением ездила по пластиковому покрытию пола. Экспериментальный дрон был оснащен 12 реактивными минидвигателями, мощности которых хватало для перемещения платформы вперед и в стороны. Сделано это было для того, чтобы создать имитацию инерции, которая неизбежно будет возникать при маневрах дрона в космосе. За вертикальные маневры всё же отвечала гидравлика платформы. Управление дроном осуществлялось миниатюрными джойстиками с операторского пульта в другом помещении, ориентироваться оператор мог только по встроенным в дрон телекамерам и приборной доске. Напротив дрона монтировался имитатор стыковочного узла, отдельных элементов спутника или иные модели.

Испытательный стенд и пульт управления.
В ходе серии испытаний экспериментальному Free Flyer удалось состыковаться со спутником с помощью простого стержнеобразного зонда. С помощью дистанционного управления он удалил и заменил узел двигателя спутника, установил и удлинил штыревую антенну, сменил аккумулятор. Он также смог обнаружить треснувшие и разрушенные элементы солнечных панелей. С помощью зеркала и телекамеры на манипуляторе оказалось возможным даже провести инспекцию внутренних узлов оборудования. Нельзя сказать, что испытания прошли идеально — все действия оператору удавалось выполнить со второй-третьей попытки. Однако было доказано, что при должных тренировках и навыках оператора дрон может полноценно выполнять возложенные на него задачи.
Увы, практической реализации именно этот проект так и не дождался, хотя в вялотекущем состоянии продолжается до сих пор.

V-Bat от DARPA (США) — дрон с «рукой».
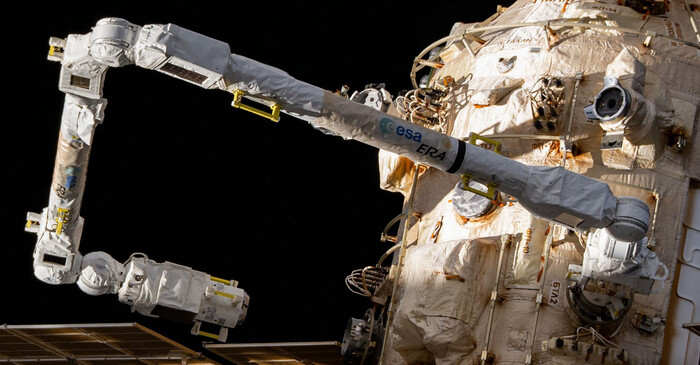
Европейский же манипулятор на модуле «Наука» — без движков — прикручен.
После окончания Холодной войны и распада СССР темпы освоения космоса сильно снизились и сейчас там для автономных роботов банально нет работы. Вся надежда на будущее.
Подпишись на наш блог, чтобы не пропустить новые интересные посты!
Показать полностью
9

Сможете найти на картинке цифру среди букв?
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi

Американская ракета-носитель «Атлас»

Ракета «Атлас», созданная в конце 50-х годов, считается одной из самых надежных ракет-носителей. В различных модификациях она используется до сих пор, как самостоятельно, так и в качестве первых ступеней более мощных носителей. Американцы еще в 1946г. приступили к разработке мощных ракет носителей атомного оружия.
Судьбы первых в мире межконтинентальных баллистических ракет (МБР) – советской «семерки» Р-7 и американского «Атласа» удивительно похожи. Обе МБР обязаны своим появлением холодной войне и прогрессу в области ракетной техники, аэродинамики, радиоэлектроники и т.п. Обе должны были нести разрушение и смерть, а в результате стали своеобразными гонцами жизни – с их помощью люди смогли подняться на космические орбиты. Ракеты схожи концептуально. Иногда эта схожесть прячется (обе построены по параллельной схеме деления ступеней, но, как же они внешне не похожи друг на друга!), иногда скрыть ее невозможно (обе оснащены кислородно-керосиновыми ЖРД и управляются качающимися камерами). Разработчики считают, что идеологически «Атлас» родился в 1946 г. из идеи Карела Дж. Боссарта, технического директора отдела астронавтики фирмы Convair, предложившего объединить несущую конструкцию и топливные баки ракеты в единое целое. Фактически это превращало ее в летающий бак с двигателем и давало заметные преимущества по сравнению с классической немецкой ракетой A-4 (V-2), имевшей тяжелую конструкцию наружной оболочки, подкрепленную шпангоутами и стрингерами, и специальные баки для горючего и окислителя. В новой схеме использовался наддув газообразным азотом как способ обеспечения устойчивости стенок ракеты, что позволило отказаться от внутреннего силового набора и одновременно уменьшить ее массу.
Попытаемся проследить, как американская «межконтиненталка» превратилась в успешный космический носитель. Одной из первых разработок была ракета МХ-774 в 1946–1947гг. К 1951г. ее модификацию (ракету МХ–1593) переименовывают в ракету «Атлас». Первый экспериментальный запуск «Атласа» был осуществлен 11 июля 1957г. К 15 пуску была достигнута расчетная дальность 10 250 км. Стартовый вес одной из первых модификаций «Атласа» составлял 125-135 т, высота ракеты на стартовом столе — 31-36 м. Первая ступень имеет три жидкостно-реактивных двигателя с суммарной тягой 163 тонны.

Первые космические носители на базе МБР Atlas D.Модификации: LV-3B (Mercury), LV-3A (Agena)и LV-3C (Centaur).

Старт РН « Атлас»
В качестве топлива используется жидкий кислород и керосин. Самостоятельно носитель «Атлас» используется сравнительно редко, для вывода на орбиту космических аппаратов обычно это варианты «Атлас-Аджена» и «Атлас-Центавр». Полезная нагрузка, доставляемая на орбиту, колеблется в зависимости от варианта и модификации от 2.2 до 5 т.
С помощью ракеты-носителя «Атлас» на орбиту ИСЗ выводятся почти все секретные американские спутники. На ранних этапах космической эры именно «Атласы» выводили такие научные и экспериментальные спутники, как ИСЗ серий ATS, OV-1, OGO, OSO и многие другие. С помощью носителей «Атлас-Центавр» выводились спутники военной связи ФЛИТСАТКОМ, астрономические ИСЗ HEAO, многие другие большие ИСЗ и космические аппараты, в том числе спутники связи международного консорциума ИНТЕЛСАТ. Характерной особенностью РН «Атлас-Центавр» является то, что на ней работает разгонный блок «Центавр», на котором установлен ЖРД RL-10 – первый в мире кислородно-водородный двигатель. Первый опытный запуск ракеты с этим блоком был осуществлен 27 ноября 1963г.
Первый ЖРД на жидком водороде и жидком кислороде был произведен в СССР 26 июля 1967г. До 1966г. шла отработка ракеты с этим блоком для запуска космических аппаратов. 2 июня 1966г. был запущен к Луне первый аппарат «Сервейор». РН «Атлас-Центавр» работала до 1989г. За это время было осуществлено около 150 пусков ИСЗ и АМС, в том числе полеты к Меркурию, Венере, Марсу, Сатурну, Урану и Нептуну таких АМС как Pionеr, Mariner, Surveyor, Viking, Voyager, Cassini. Разгонный блок «Центавр» с первым в мире кислородно-водородным двигателем RL-10 устанавливался и на других РН, но в основном он использовался с РН «Атлас».

РН семейства Atlas 5 (слева направо) серий 300 (обтекатель MPF), 400 (обтекатель EPF), 500 (обтекатель 5-m Short PLF) и Heavy (обтекатель 5-m Large PLF). ( НК№ 5 1999г)
Американцы не особенно стремятся к созданию новых ракет-носителей, поскольку у существующих, конструктивно отработанных ракет, грузоподъемность вполне достаточна для современного уровня околоземных исследований. Они учли наш горький опыт создания таких сверхмощных ракет, как «Энергия», которая после двух запусков уже не выпускается из-за отсутствия достаточно тяжелых полезных нагрузок для сверхмощных носителей.
Необходимо отметить, что в начале 60-х годов наши ракеты С.П. Королева Р-7 и Р-9 по своим тактико-техническим данным как боевые ракеты фактически были одинаковы с американскими «Атлас» и « Титан». Единственно, в чем Америка нас опережала, так это в двигателестроении. Однокамерные двигатели имели у них большую тягу. Об этом 8 августа 1960г. С.П. Королев писал в аналитической справке для правительства. Пройдет 40 лет и для последних модификаций «Атлас» Америка станет закупать двигатели в России. На первой ступени РН «Атлас-5» стоит российский двигатель РД-180 — прототип РД–170, использовавшийся на сверхтяжелой ракете «Энергия».
23 августа 2002г. состоялся первый старт РН «Atlas-5». На ее разработку было затрачено более $1 млрд. Стоит отметить, что двигатели РД-180 для первой ступени РН «Atlas-5» созданы специалистами российского НПО «Энергомаш» имени академика В.П.Глушко. Это третий случай использования российских ракетных двигателей на американских космических носителях. Ранее были проведены два старта РН «Atlas-3», первые ступени которых также были оснащены РД-180.
«Атлас-5» должна выводить на геостационарную орбиту спутники весом около 4 тонн. В будущем планируется использовать «Атласы» с российским двигателем для запуска АМС к Марсу. К середине 2003г. было произведено четыре запуска «Атласа» с российским двигателем: 24 мая 2000г., 21 февраля и 21 августа 2002г. и 12 февраля 2003г.
12 августа 2005г. РН «Атлас-5» с российским двигателем РД-180 и разгонным блоком «Центавр» стартовала к Марсу АМС MRO (Марсианский разведчик). Это был первый в космонавтике случай, когда межпланетная АМС запускалась двухступенчатым носителем. Высота ракеты с полезным грузом – 57.4 м, стартовый вес около 333 т. и вес АМС 2180 кг. Для ракет семейства «Атлас» это был 77-й успешный старт подряд за последние 12 лет. 18 июня 2009 г. РН Atlas-5 (AV-020) произведен запуск двух лунных АМС LRO (Lunar Reconnaissance Orbiter) и LCROSS (Lunar Crater Observation and Sensing Satellite).Этот старт стал 19-м использованием ракет типа Atlas для запуска американских аппаратов к Луне (включая старты 1960-х годов), 8-м использованием разгонных блоков Centaur в рамках лунной программы США, 16-м стартом РН Atlas-5 (начиная с 2002 г.), 15-м пуском РН Atlas-5 с мыса Канаверал, 7-м применением ракеты в конфигурации 401, 8-м пуском ракеты специалистами компании United Launch Alliance и 3-м применением ракеты Atlas-5 для нужд NASA.
23 ноября 2009 г. выполнен пуск ракеты-носителя Atlas-5 / 431 (AV-024) с ттелекоммуникационным спутником Intelsat-14 на борту. Состоявшийся пуск стал 601-м пуском ракет семейства Atlas, начиная с 1957г. Это также 315-й пуск данного типа ракет с мыса Канаверал.

РН «Atlas-5» / 431 (AV-024)

Спутник « Intelsat-14»
История ракеты Атлас / History of the Atlas Missile (1960)
Показать полностью
5
1