В наше время, из-за санкций одноплатники стали стоить каких-то «конских» денег. Даже б/у RaspberryPi Zero стоит 2-3 тысячи рублей на барахолках, что, мягко скажем, не совсем лояльная цена для «самого дешевого одноплатного компьютера в мире». Конечно, Orange Pi Zero всё ещё можно купить в пределах 1.500-2.000 рублей, но как по мне и эта цена не слишком лояльна за те характеристики, который предлагает такой одноплатник. С другой стороны, Android-планшеты 10-летней давности продаются на барахолках по 100-300 рублей, что выглядит гораздо привлекательнее, причём на некоторые устройства практически без костылей можно установить полноценный дистрибутив Linux! Вероятно, многие читатели скажут мол «автор бомж» и будут правы: ведь в рамках этой статьи, я хочу рассказать о том, как использовать полурабочий древний планшет в качестве полноценного одноплатника путём подключения его к микроконтроллеру и выводу GPIO! Сегодня мы с вами: узнаем, как подключить микроконтроллер к шине UART в планшете и научимся работать с последовательной шиной в Android прямо из Java и нативных программ. Интересна моя концепция антикризисного одноплатника? Тогда добро пожаловать под кат!
❯ Зачем это нужно?
Пожалуй, нельзя сказать, что подобная концепция пристраивания старых планшетов — вопрос исключительно цены. 2-3 тысячи рублей не такие уж и большие деньги и при желании можно купить хотя-бы Б/У, но всё таки полноценный одноплатник с нормальной GPIO-гребенкой. Однако здесь стоит вопрос не столько дешевизны, сколько E-Waste: зачем выкидывать в помойку потенциально рабочие планшеты с живым процессором, если их можно пристроить куда-то ещё?
На самом деле, планшеты с ROOT-доступом уже из коробки могут выполнять весьма полезные задачи, как, например, хостинг http-сервера для домашней страницы, работать как панель с часиками и погодой, или, например, работать в качестве HMI-панели для оформления заказов в шаурмечной. Кроме того, многие планшеты на базе смартфонных чипсетов (MediaTek, Spreadtrum) имеют полноценный Bluetooth-модуль, что позволяет «подружить» планшет с микроконтроллером через радиоканал, что значительно расширяет возможный спектр применений.
Преимуществ у такого подхода много: у «пожилого» планшета уже есть большой, достаточно качественный (хороший TN, либо даже IPS) дисплей с тачскрином, который поддерживает мультитач, GPU для вывода 3D-графики, 3.5мм для вывода звука + встроенные динамики, а также весьма неплохое, по сравнению с дешевыми одноплатниками, железо. Звучит весьма вкусно для цены в 300 рублей: собрать хоть немного похожую конфигурацию на базе RPi выйдет в 10-15 тысяч рублей (учитывая дороговизну MIPI-матриц с тачскринами + цену самой «малинки» и обвязки для аудиотракта).
Но при всех перечисленных достоинствах, атрибутом любого полноценного одноплатника является наличие GPIO — и даже здесь мы сможем с вами выкрутится! Первый способ, о котором я чуть выше вскользь рассказал, позволяет реализовать общение с МК и «ногодрыг» через BT-радиоканал, но минусы такого подхода очевидны (МК с BT дороже, радиоканал потребляет дополнительную энергию, некоторые могут посчитать BT небезопасным). Однако есть и второй подход, который заключается в использовании диагностических пятачков UART на плате устройства для наших личных целей!
С таким подходом можно использовать как «голый» Linux, используя концепцию, которую я представил в этой статье, так и взаимодействовать из Java-приложений для Android (что даёт уже, как минимум, удобный GUI-фреймворк). Сегодняшняя статья будет «без воды», только чистая конкретика, поэтому давайте перейдем к реализации!
❯ Подготовка
Как я уже говорил выше — в рамках данной статьи мы рассмотрим использование UART в планшете для наших собственных целей. UART — это двунаправленная полнодуплексная цифровая шина, которая позволяет обеспечить стабильную передачу данных при относительно невысокой скорости, измеряемой вбодах. То есть, быстро стримить картинку с её помощью вы не сможете, но сможете, например, получить состояние входов МК, прочитать что-то на шине I2C, используя мост UART -> I2C или, например, прочитать показания датчиков, которые МК предварительно опросил.
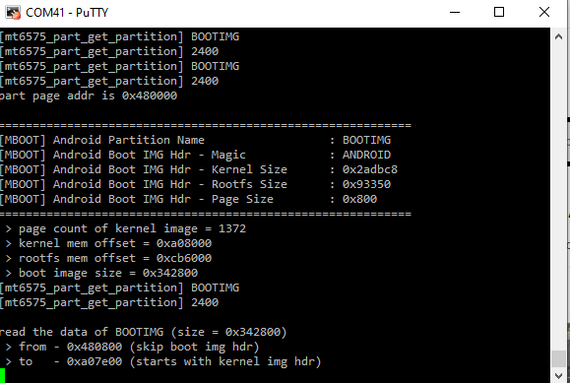
Сама по себе концепция очень простая: многие китайские производители планшетов и смартфонов не только разводят UART в виде отдельного пятачка на плате, но и подписывают его, задействуя UART-канал как вывод для логов ядра, а иногда и предоставляя доступ к рутовой консоли! В свою очередь, из юзерспейса мы можем получить доступ к UART с помощью устройства/dev/ttyS<x>на подавляющем числе чипсетов и/dev/ttyMT<x>на MediaTek. Однако учтите, что в некоторых случаях придется патчить загрузчик, дабы редиректнуть логи ядра в /dev/null.
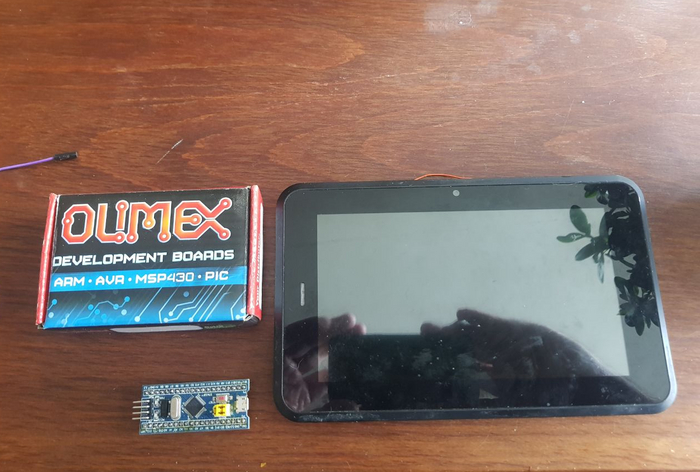
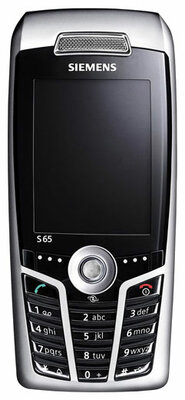
Однако наличие UART на плате — не всегда признак того, что он сконфигурирован в системе верно. Например, на смартфонах с чипсетами SC6820 нормально завести UART я так и не смог, а на некоторых устройствах на базе MT657x нужно патчить загрузчик, дабы он «увидел» нужный канал UART! В моём случае, героем статьи стал планшет Prestigio, у которого отказал тачскрин, но был доступен UART:
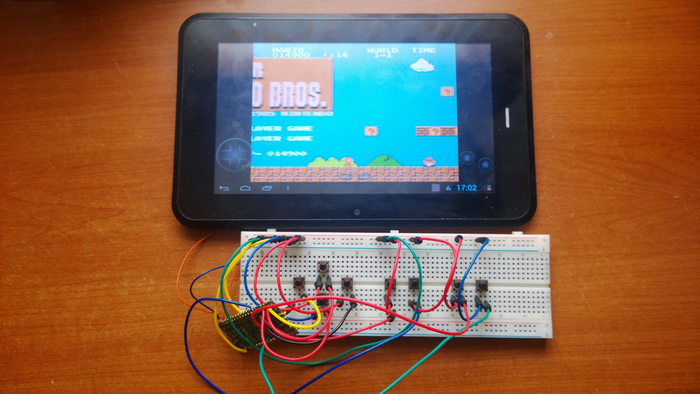
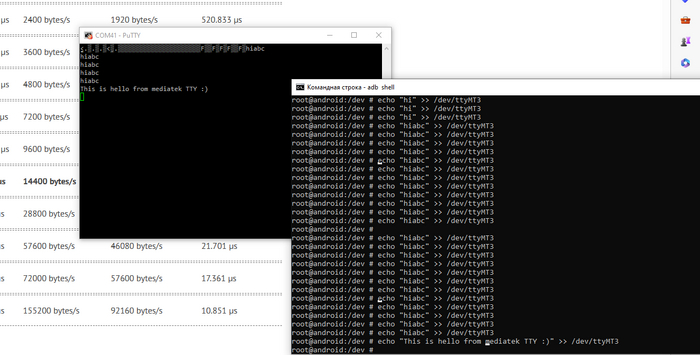
Конкретно в моём случае, после установки последней официальной прошивки планшет перестал слать логи на UART и устройство /dev/ttyMT3 оказалось доступным для наших операций, в вашем же случае может потребоваться настройка devicetree, или просто патчинг загрузчика, дабы редиректнуть консоль на другой вывод UART. Кроме того, необходимо обязательно получить root-доступ хотя-бы к adb shell, поскольку доступ к /dev/tty устройствам возможен только от имени суперпользователя. Как же проверить UART на возможность чтения/записи? Сначала нам необходимо взять ESP32 или любой UART-USB преобразователь, припаять сигнальные линии RX/TX и использовать любую программу для работы с последовательным портом, например Putty. Заходим в adb shell, и пишем что-нибудь в консоль:
Вуаля! Всё работает :)
Работает? Замечательно, значит мы сможем использовать планшет вместе с микроконтроллером! Переходим к практической реализации нашего приложения!
❯ Используем из Java
Я специально решил выделить для Java-подхода отдельный раздел, поскольку просто взять и открыть /dev/ttyMT3 с помощью FileInputStream не выйдет. Дело в том, что даже несмотря на наличие root-доступа, по факту ни одно Android-приложение его не имеет (за исключением подписанных системных в папке /system/app/) и для всех операций, требующих повышенных привилегий, либо распаковывают и запускают внешнюю нативную программу из под суперпользователя, либо с помощью специального костыля с запуском sh-программ читают/пишут нужные блочные устройства сами. Связано это с тем, что все Android-приложения работают в хост-процессе app_process, который форкается (отпочковывается) от «главного» процесса, который запущен из под «простого» пользователя, который не находится в группе system.
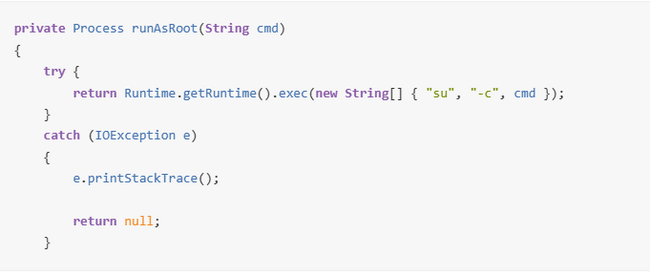
Здесь концепция также очень простая: su имеет аргумент -c, который позволяет запустить команду от имени root-пользователя и возвращает объект процесса, дабы мы потом могли перехватить stdout:
Таким образом, для чтения текстовых данных из UART'а нам достаточно лишь периодически «слушать» stdout команды cat и обрабатывать данные:
Костыль, но со вкусом :) Если вас не устраивает такой подход или ваше приложение значительно более комплексное, вы можете использовать UART и из под нативных программ.
❯ Используем из C
Работа с последовательными портами в Linux не отличается от работы с любыми другими файлами и устройствами: вызовов open, read, write и close обычно хватает и лишь иногда к ним в довесок нужен ioctl.
int fd = open("/dev/ttyMT3", O_RDWR); int result = write(fd, command, strlen(command));
Для работы с терминалом необходимо использовать модуль termio который предоставляет все необходимые структуры для настройки режима работы терминала, в т.ч и бодрейт. Дело в том, что изначально последовательное устройство настроено на режим работы в качестве терминала, т.е драйвер отдаст данные только после того, как устройство на UART пошлёт \n, или превысит размер внутреннего буфера для сообщения. Если вам нужно работать с бинарными данными и получать их «на лету» — необходимо настроить последовательный порт в «binary» режим:
Если же вам достаточно текстового терминального режима, то можно продолжить как есть и использовать fgets, fscanf и прочие удобные функции из libc! О том, как собрать нативную программу для смартфона и как вообще выбросить Android из него, читайте в моей отдельной статье.
❯ Заключение
Вот таким образом можно использовать проводную шину в планшете для собственных нужд! Как видите, совершенно ничего сложного и используя эти наработки, я реализовал уже не один проект! Надеюсь, материал вам был интересен и полезен :) Пишите своё мнение, можно ли использовать дешевые планшеты по 300 рублей в качестве одноплатников?
Статья была подготовлена при поддержке TimeWeb Cloud. Подписывайтесь на меня и @Timeweb.Cloud, дабы не пропускать новые статьи каждую неделю! Ну а больше подробностей о будущем контенте, как обычно, в первом комменте! Также у меня есть свой Telegram-канал, куда я выкладываю свои мысли, советы по ремонту и моддингу различных гаджетов, а также вовремя публикую ссылки на новые статьи!
В посте постараюсь кратко рассказать про сабж, почему это не сложно, не дорого и экономически выгодно. И как из этой идеи родился новый opensource проект.
Первую статью публиковал на хабре, там есть технические детали и подробная предыстория.
Краткая предыстория
Построили дом, смонтировали радиаторную систему отопления с газовым котлом. Находясь в доме зимой, ощутил разницу температуры в доме в течение дня, потому что на котле стояла фиксированная температура, а на улице она была не фиксированная. В итоге в доме то +18, то +28, нехорошо.
Далее были поиски готовых решений управления котлом для поддержания внутри дома заданной температуры, и на тот момент был, вроде бы, только Zont, но мне он не подошел, т.к. в доме я использую Home Assistant, нормальной интеграции zont'а в Home Assistant нет до сих пор, а управлять отоплением из отдельного приложения не хотелось.
Путь диайвайщика
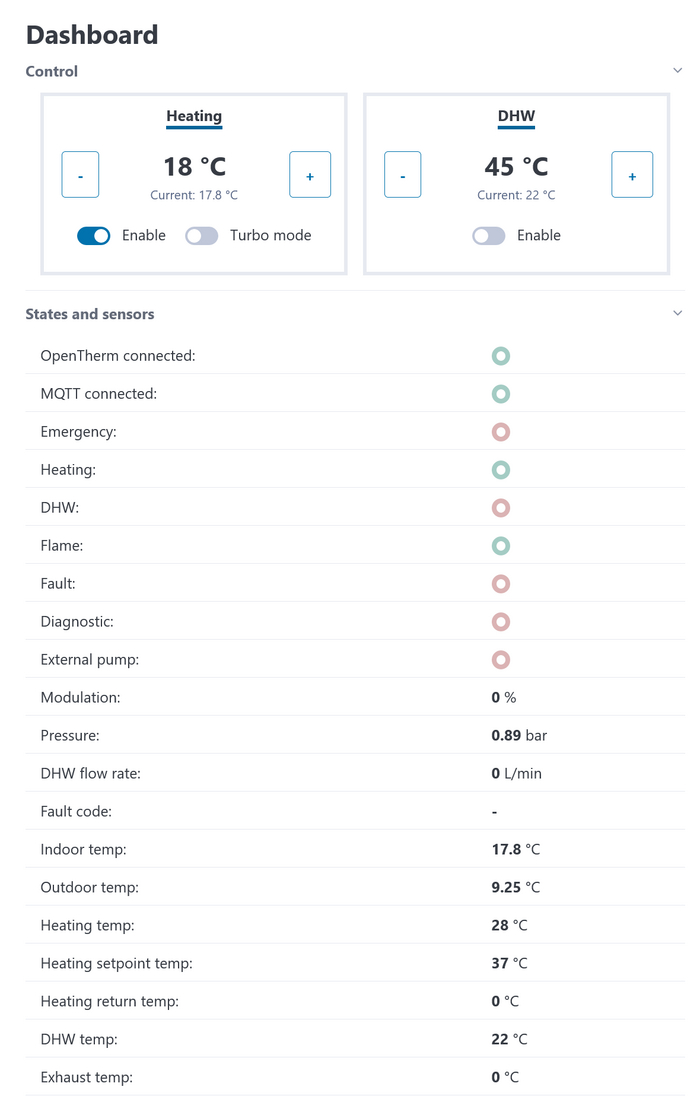
Собственно, за неимением других вариантов начал разрабатывать свой девайс и прошивку для котлов c OpenTherm, который занимается расчётом температуры отопления и управлением котлом в целом. Проект решил опубликовать на github и написать статью на хабре, увидел к этому интерес у людей и продолжаю развивать. В последних версиях прошивки была добавлена возможность управления контроллеров без Home Assistant, напрямую из браузера с компьютера/телефона:
Скриншот страницы управления отоплением и ГВС
Про экономическую целесообразность и комфорт
Когда на котле установлена фиксированная температура, температура в помещении может сильно меняться в течение дня. Например, на улице -30 и мы ставим на котле 60 градусов, за ночь температура поднялась до -10, а температура на котле все те же 60 градусов. И котёл может перегреть дом до 28-30 градусов.
Это мало того, что это не комфортно, но и лишний расход газа, который, по моим наблюдениям, мог составить на 3-5 тыс. рублей в месяц (в зависимости от размера дома).
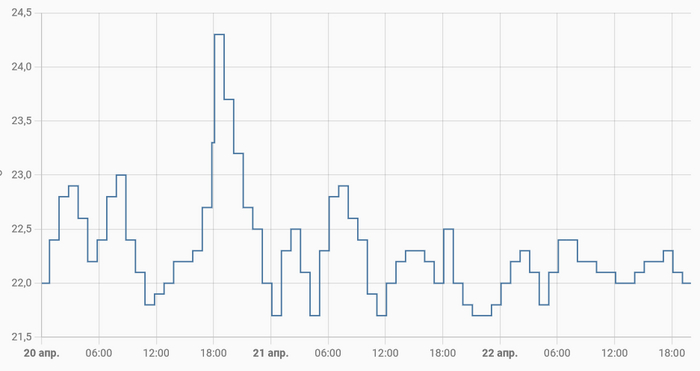
Именно по этой причине целесообразно использовать погодозависимое регулирование температуры. На примере моего дома при установленной температуре 22.5 градуса это теперь выглядит так:
Пик до 24 град. связан с нагревом солнцем через окна
Кроме этого, экономия может быть достигнута за счёт установки более низкой температуры (12-15 градусов) на период длительного отсутствия, например, если это дом для эпизодического проживания.
Использование в квартирах. Я лично использую один девайс в квартире под сдачу с автономным отоплением. Потому что есть арендаторы, которые не умеют или боятся менять температуру на котле. И иногда греют квартиру до 30 градусов и потом удивляются счетам за газ. Установка девайса и беспроводного bluetooth датчика температуры полностью избавил меня от звонков по этому поводу :)
Почему это недорого
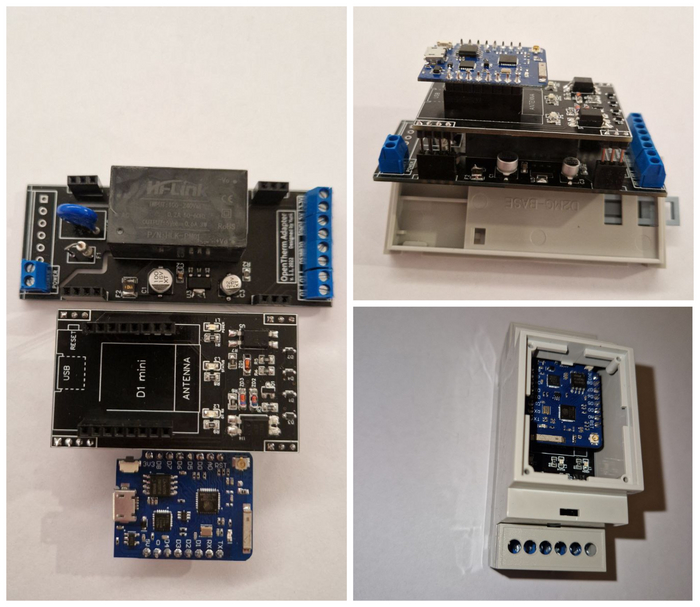
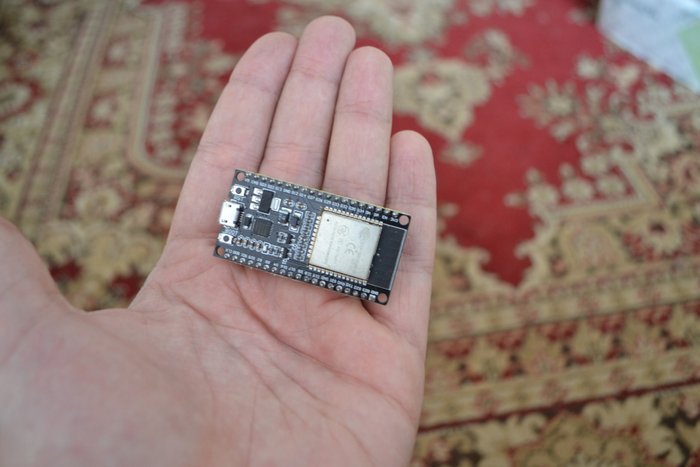
Для устройства используется плата ESP8266 или ESP32, цена которых на али/авито от 200 до 800 рублей.
Если умеете и любите паять, цена основной платы и компонентов для самостоятельный сборки выходит примерно в 1200 рублей без корпуса или 1500 рублей с корпусом. Платы можно заказать через pcbway/jlcpcb или вовсе собрать на макетке, а компоненты я брал в Чип и Дип. В собранном виде девайс может выглядеть вот так:
Если не умеете или не любите паять, то есть готовые устройства на ozon, цена от 2500 до 4000 рублей, искать по запросу esp opentherm (не реклама, это не мои девайсы, я их вообще не собираю на продажу). Или Zont за 12-15 тысяч рублей.
Итого: от 2000 до 4000 рублей за комфорт и экономию в долгосрочной перспективе.
В заключение хочу сказать, что весь этот путь от изучения протокола OpenTherm до создания своего DIY проекта и разработка прошивки полностью себя оправдал, в доме воцарилась стабильная температура, а я получил моральное удовлетворение от процесса :)
Прошивка с открытым исходным кодом и полностью бесплатная.
Пикабу, привет! Ловите немного кликбейта вам в ленту... А если серъезно, то ровно год назад я писал про разработку прототипа интерактивной светодиодной платформы. Я тогда и не верил, что смогу найти партнера-инвестора на vc.ru и что через год у нас будет полноценная игровая в Москве с выручкой 1,2 миллиона рублей в месяц.
Суть развлечения заключается в том, что люди должны выполнять различные игровые сценарии: от обычных “Классиков” и “Пол – это лава”, до игры в “Пинг-Понг” на 32 квадратных метрах площади, покрытой специальными светодиодными плитками, оснащенными датчиками нажатия.
Запуск и первая выручка
На запуск потратили порядка 7 млн. руб. Открылись в октябре, в операционный плюс вышли в январе, а за март сделали уже 1,2 млн. выручки. Мы считаем это весьма достойным результатом для нашего не совсем удачного формата игровой (об этом расскажу чуть ниже) и, вполне вероятно, март так и останется самым прибыльным месяцем в этом году:
Выручка за март:1 212 305 руб;
Средняя загрузка:51,8% (работаем с 10 до 23ч);
Средняя выручка в час:5 801 руб;
Основные статьи расходов:
Аренда + коммуналка + интернет:133 200 руб;
Зарплаты + налоги: 265 894 руб;
Маркетинг:100 000 руб;
Роялти (10%):121 231 руб;
Другое (сервисы, расходники):65 327 руб;
Чистая прибыль за март:526 653 руб;
Заголовок и вступление получились немного кликбейтными. Общие показатели выглядят далеко не так радужно, но мы искренне считаем, что сможем продолжать зарабатывать и построить целую сеть игровых!
Ниже – показатели за первые полгода работы. На старте много экспериментировали и откровенно теряли деньги, а потому несколько месяцев проработали в минус и только сейчас наверстываем:
Общая выручка за первые полгода:3 628 030 руб;
Чистая прибыль: 609 514 руб;
Ну, как есть… мы за открытость! В плюсе – уже хорошо!
Не очень удачный формат заведения
Помещение мы сняли в цоколе небольшого бизнес-центра и делали ремонт полностью с нуля с возведением стен. Изначально планировали разбить заведение на четыре зоны (и разбили): зона ресепшена – 18 м2, зона отдыха – 29 м2, большая прямоугольная игровая – 34 м2 и малая квадратная игровая – 19 м2. На старте денег хватило только на электронику для одной большой игровой, а помещение второй комнаты просто отремонтировали и начали использовать в качестве подсобки.
Процесс сборки пикселей в подсобке и последующей выкладки в игровой.
Уже после открытия мы поняли, что поднять средний чек за счет добавления второй игровой не выйдет, т.к разным компаниям будет тесно в одной зоне отдыха, к тому же существенная выручка идет с аренды под праздники/корпоративы. Короче, надо было строить две зоны отдыха + одну игровую: в таком формате можно было бы чередовать доступ людей в игровую и повышать средний чек, так делают многие VR арены. Итого, у нас теперь есть большая подсобка в 20 квадратных метров. Тупо вышло…
Как сеть оффлайн квестов может быть IT-компанией?
С самого начала мы позиционируем себя IT-компанией. Казалось бы, где сеть оффлайн квестов, а где IT-компания?
Светящиеся плитки на полу – далеко не рокетсайнс. Мы прекрасно понимаем, что невозможно будет тягаться с Китаем только на поприще электроники, это явно не сможет стать основной долгосрочной деятельностью. Мы сразу делаем большой упор именно на софт: мы УЖЕ в разы круче китайцев, продолжаем выстраивать свою экосистему и уже сейчас закладываем архитектуру для масштабирования проекта.
Наш первый дежурный дашборд, который скоро пополнится новыми городами
Главная идея – сделать работу всей сети прозрачной и поддерживаемой. Ведь лучшая проблема – это та, которая не дошла до клиента. А для этого нужна хорошая система превентивной диагностики и мониторинга с алерт менеджментом. Этим сейчас и занимаемся.
В IT тоже любят поговорку: “Быстро поднятое упавшим не считается!”
Open-source игры, а значит можешь и ты!
Помимо наличия у нас визуального конструктора для механики “Пол – это лава”, про который я упоминал в предыдущей статье, мы разработали собственную уникальную веб-платформу для написания и отладки игр на языке Lua и готовы выдать доступ всем желающим попробовать свои силы в разработке пиксельных игр!
Веб-платформа для разработки и тестирования пиксельных игр
Язык Lua – очень простой в изучении и использовании, но, в то же время, один из самых быстрых и производительных скриптовых языков программирования! Де-факто он является стандартом в игровой индустрии и используется, например, в таких играх, как World of Warcraft, Roblox, Minecraft и Angry Birds.
Его использование уже позволило нам сильно ускориться в выпуске новых игр за счёт привлечения фрилансеров, а в будущем мы рассматриваем идею платить авторам денежное вознаграждение, соизмеримое с количеством запусков их игр, т.е направлять фиксированный процент от выручки сети на поощрение сторонних разработчиков. А сейчас договариваемся о сотрудничестве с онлайн-школами программирования и хотим запустить курс обучения разработке игр под нашу платформу.
Новый конструктив и проблемы производства в Китае
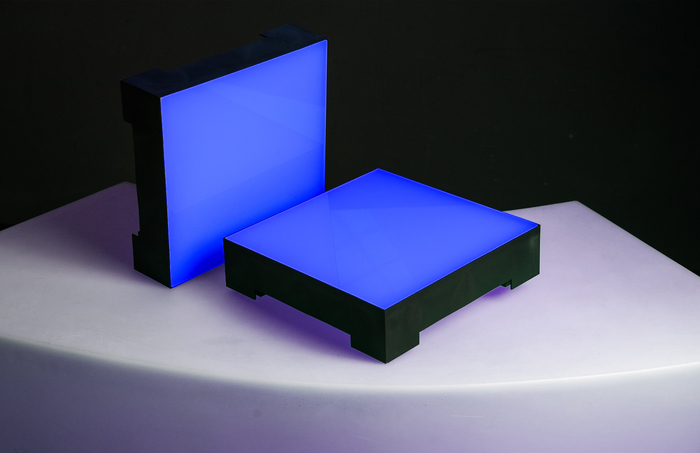
Первую версию пикселей мы делали из рамок на алюминиевом профиле, но такой конструктив оказался очень трудозатратен в сборке и не годился для массового производства (вы прочувствовали всю боль сборки по фото выше?), поэтому новую версию мы решили делать из пластика. Изготовление формы для литья и десяти тестовых образцов в Китае обошлось нам порядка 600 тыс. руб. Почувствовал себя конструктором:
Кто читал меня ранее, знает, что я хейтил китайские пиксели за крайне дешевый и легко горючий пластик:
Мы считаем негоже гнать 3кВт мощности под детскими ногами с таким материалом. Интересно, есть ли на этот счет какие-то пожарные нормы? Ничего не нашел.
А вот видео, как я пытаюсь поджечь наш новый пиксель из специального огнестойкого угленаполненного полиамида:
Да, мой первый прототип выглядел именно как гаражное производство и был собран из говна и палок, но мы то не стоим на месте. Посмотрите, какая красота сейчас получилась:
Заключение
Бизнес модель работает, и емкость рынка позволяет развиваться. Сейчас мы активно занимаемся вопросом открытия собственных дополнительных точек в Москве и первых точек партнеров в других городах.
Я безмерно благодарен людям за поддержку первой статьи, за крутые знакомства и положительную обраную связь!
Буду рад ответить на любые вопросы в комментариях, а кому интересно следить за развитием проекта, подписывайтесь на телеграм канал: @pixel_quest, пишутам исключительносам и не чаще одного раза в 4-7 дней, маркетологов выгнал, больше планирую рассказывать про техническую составляющую проекта с постепенным уклоном в IT, дополнительно публикую ежемесячные финансовые отчеты.
Мы постарались сделать каждый город, с которого начинается еженедельный заед в нашей новой игре, по-настоящему уникальным. Оценить можно на странице совместной игры Torero и Пикабу.
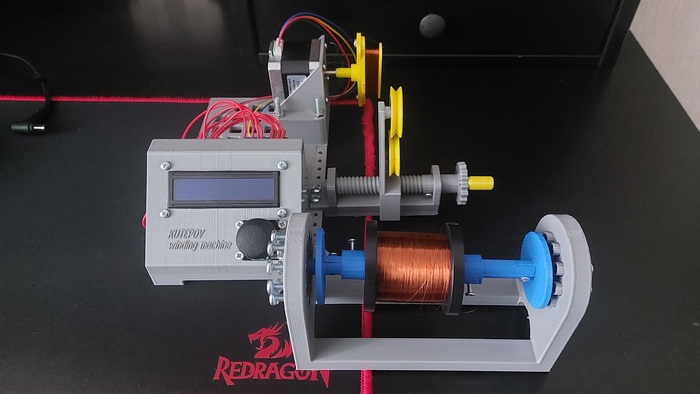
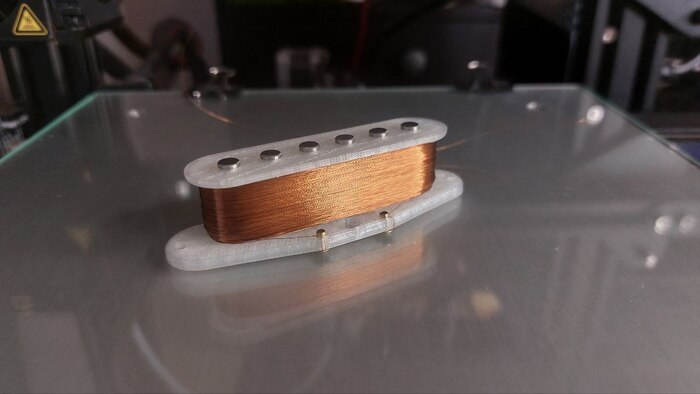
Несмотря на то, что студенческие годы далеко позади, электрогитара и увлечение музыкой остались в моей жизни как хобби. А инженерный бэкграунд и неугасаемое любопытство привели к тому, что несколько месяцев назад я увлёкся темой изготовления звукоснимателей и начал погружаться в этот удивительный мир, изучая и конспектируя литературу. Но теория должна подкрепляться практикой, поэтому в какой-то момент мне понадобился намоточный станок и я решил его изготовить самостоятельно. В наличии имеется 3d-принтер, в Компас 3D работать немного умею и с Arduino факультативно знаком, а вот с ТММ (Теория Машин и Механизмов) уже всё гораздо печальнее, но это не повод сдаваться!
О намотке катушек звукоснимателей
Данная статья именно про изготовление намоточного станка, но так как планируется мотать катушки звукоснимателей для электрогитары, то придётся учитывать определённую специфику при его проектировании.
Для начала разберёмся с типами намотки, их всего 2:
Ручная намотка - двигатель вращает катушку, а оператор контролирует натяжение и укладку провода (провод скользит между пальцев). Повторяемость характеристик при таком методе намотки остаётся весьма условной и зависит от опыта оператора. Отсюда и легенды про гипотетическую "бабу Зину с Фендера", которая в 60-х мотала датчики с "тем самым" звуком :) В наше время, звукосниматели намотанные вручную, называют "бутиковые" - звучит солидно, хоть и сомнительно.
Автоматическая намотка - шаг намотки, натяжение, скорость, паттерн укладки - всё контролируется высокоточным станком с ЧПУ. Тут уже не забалуешь, поэтому повторяемость характеристик остаётся высокой, что на мой взгляд является несомненным преимуществом.
Оба типа намотки остаются сегодня востребованы, но станок для ручной намотки значительно проще по своей конструкции, поэтому я решил двигаться от простого к сложному и остановился на первом варианте. Но от идеи создания станка для автоматической намотки я не отказываюсь - некоторые наработки имеются.
Теперь про толщину провода - он очень тонкий. Например если взять тот же AWG 42, то диаметр медной жилы составит всего 0,0635 мм. Мотать такой провод нужно очень осторожно - лишние нагрузки могут привести к его растяжению или обрыву, а ни того, ни другого мне не надо.
Первый неудачный прототип станка
Первый вариант намоточного станка оказался не очень удачным, так как я несколько спешил - уж очень хотелось послушать как звучит "бутиковый" звукосниматель :D
Однако этот прототип очень наглядно продемонстрировал все возможные проблемы и после их устранения мне удалось добиться нужного качества намотки, поэтому я считаю чрезвычайно важным его продемонстрировать.
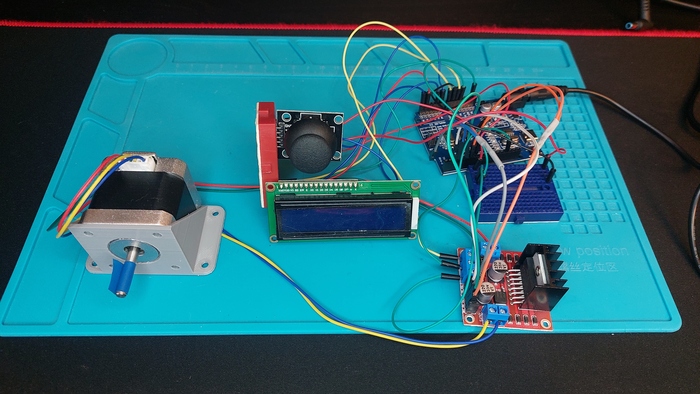
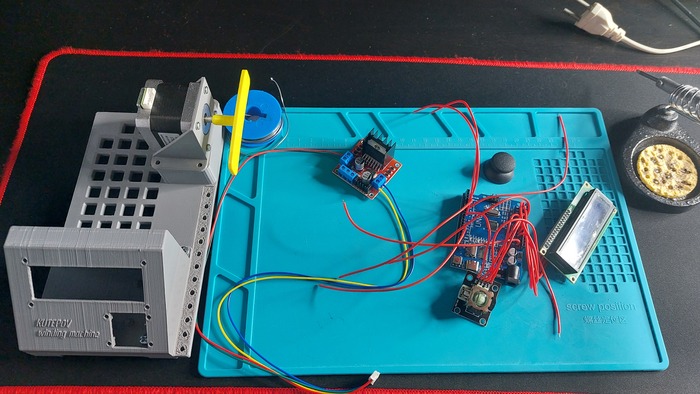
Началось всё со сборки макета и написания к нему скетча:
За основу я взял Arduino UNO (точнее плату c Aliexpress, внешне напоминающую Arduino UNO), так же заказал джойстик и дисплей 1602 + I2C, чтобы задействовать минимум пинов на плате.
Чтобы было удобно задавать точное число витков, я решил использовать биполярный шаговый двигатель HANPOSE 17HS4401 в форм-факторе Nema 17. Двигатель реально классный, одно удовольствие с ним работать! А вот с драйвером я промахнулся и вначале поставил L298N. Он достаточно быстро нагревается и двигатель начинает пропускать шаги - это уже выяснилось в процессе намотки первых образцов. В последствии я поставил драйвер TB6560, который отлично справляется со своей задачей.
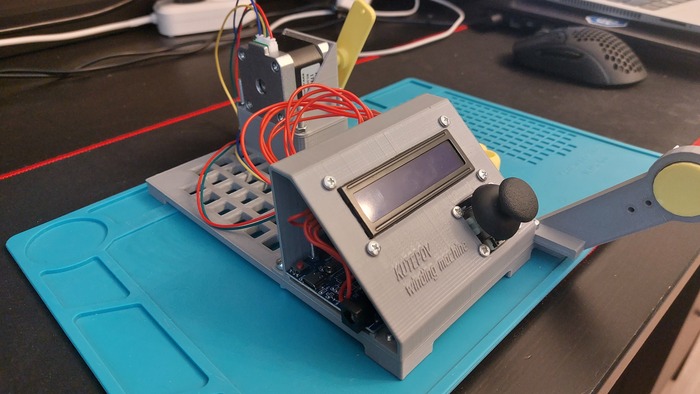
Далее в Компас 3D я спроектировал первые детали станка, в том числе корпус и основание и распечатал, после чего начал сборку:
Само основание сделано так, что можно добавлять разные модули - это очень помогло обкатать некоторые конструктивные решения, затем улучшить их. А вот корпус блока управления нужно было сделать разборным - поместить туда всю электронику и закрутить гайки - было отдельным квестом. На фото ниже частично собранный станок:
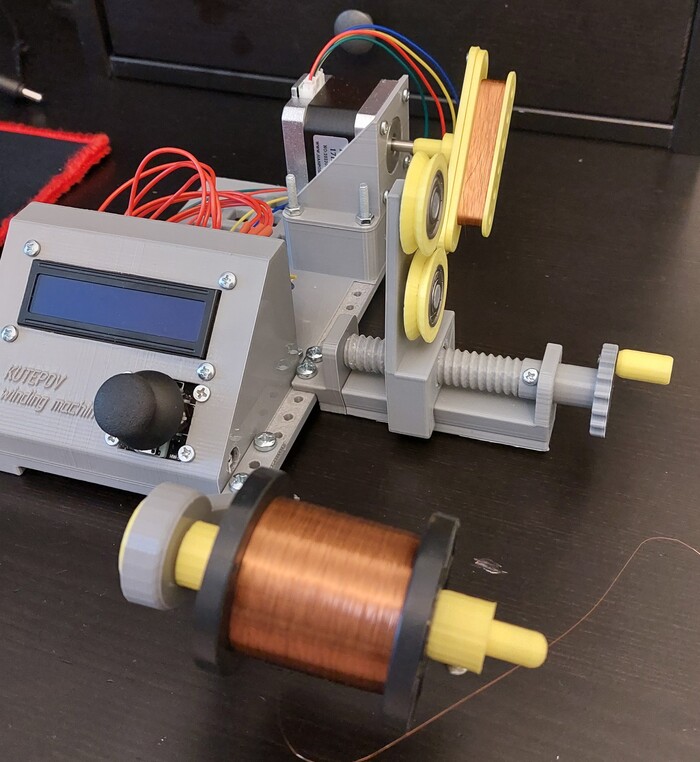
Далее был допечатан укладчик и проведены первые испытания:
Теперь я расскажу о проблемах данного решения:
Начну с программного обеспечения - для управления шаговым двигателем первоначально я использовал стандартную библиотеку Stepper. К сожалению она не сильно гибкая в настройках и подходит только для самых простых случаев. Например двигатель запускался сразу с заданной скоростью без ускорения, что создавало в моменте высокую нагрузку на провод и он просто рвался. В итоговом скетче, который будет ниже, использована другая библиотека - AccelStepper.
На укладчике нет ни демпфера, ни натяжителя - предполагалось что я буду слегка притормаживать бобину рукой, но это оказалось плохим решением. Можно было просто выкинуть укладчик из конструкции и укладывать провод пальцами, но мне захотелось чтобы натяжение контролировалось именно станком - таким образом можно было бы свести к минимуму обрывы провода.
С держателем бобины тоже не всё гладко - бобина раскручивалась по инерции и провод путался, а если её притормаживать рукой, то через некоторое время происходил обрыв от малейшего неосторожного движения. Появилась задача придумать очень деликатный тормоз бобины: провод должен сходить максимально легко, при этом бобина не должна раскручиваться по инерции и путать провод.
Работа над ошибками и итоговый вариант
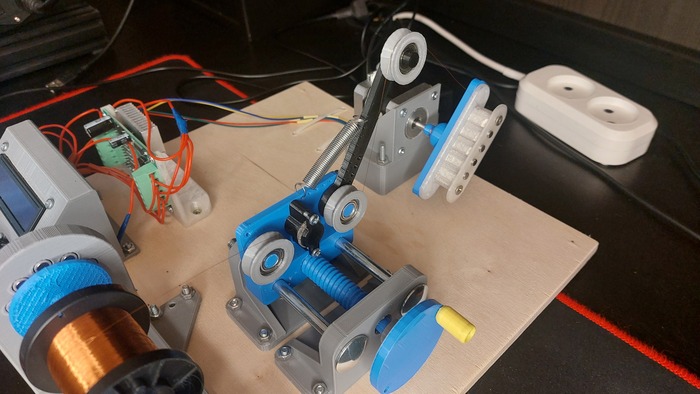
Я распечатал совершенно новый держатель бобины:
Здесь уже 2 точки опоры вала и запроектирован магнитный тормоз на небольших неодимовых магнитах (5х2 мм). Усилие можно регулировать как количеством магнитов на тормозном диске, так и расстоянием между магнитами, которое регулируется на держателе. Готовый держатель бобины выглядит так:
На держателе по кругу расположены 10 магнитов и ещё буквально по паре магнитов на тормозных дисках с 2-х сторон, на мой взгляд этого достаточно для создания оптимального усилия - тут главное не переборщить. Вал с катушкой установлен на подшипники 608ZZ, таким образом вращение достаточно свободное, чтобы легко сходил провод, но при этом магниты не дают бобине раскручиваться по инерции.
Далее настала очередь укладчика - нужно было сделать конструкцию более жёсткой, добавить демпфер и регулируемый натяжитель провода. Демпфер нужен для компенсации дополнительной нагрузки на провод, которая возникает из-за вытянутой формы катушки.
Кроме этого, был случайно проведён незапланированный краш-тест станка, в результате чего уцелели не только лишь все детали. Пришлось в качестве основания взять лист фанеры размером 30х30 см. и смонтировать всё заново.
Вот так выглядит обновлённый укладчик:
Конструкция стала более жёсткой, люфты ушли. Вместо прецизионных валов я использовал гладкие мебельные болты DIN603 (8х100 мм) из Леруа Мерлен - по ним прекрасно скользит укладчик. Для станка с автоматической намоткой такой номер не пройдёт - там очень важна точность, а для ручной намотки такое решение очень даже подходит.
В качестве демпфера выступает журавль на пружине и ограничителем хода. Основание журавля установлено на подшипник 688ZZ, чтобы избежать лишних люфтов. Те же подшипники используются в роликах. А вал червячного механизма уже на подшипниках 608ZZ.
В качестве натяжителя выступает конструкция, которая зажимает проволоку между двумя войлочными дисками - это довольно распространённое решение и тоже показывает себя хорошо на практике. Винтами можно регулировать силу натяжения провода, от которой в конечном итоге зависит и качество намотки, и характеристики катушки. Для станка с автоматической намоткой натяжение необходимо ещё и измерять, чтобы можно было точно отрегулировать станок.
На заднем плане виден новый драйвер шагового двигателя - TB6560, про который я рассказывал ранее. Он хорошо справляется со своей задачей и не перегревается при долгой работе + в нем присутствует масса настроек (ограничение тока, делитель шагов). Такой драйвер можно использовать и для станка с автонамоткой.
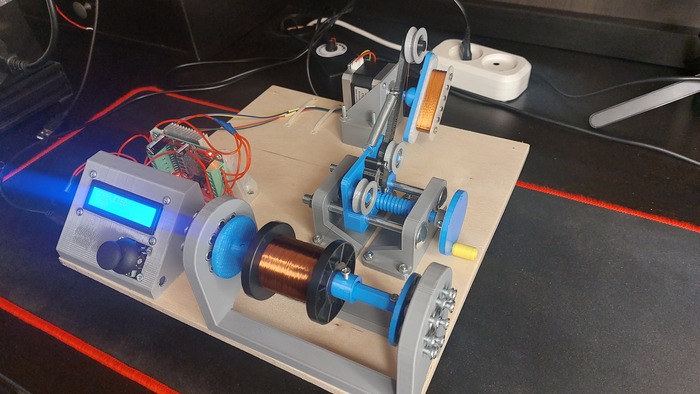
Готовый результат
Так выглядит готовый станок целиком. На этом фото уже намотана первая тысяча витков на катушку звукоснимателя:
Впечатления от станка у меня положительные, работать укладчиком вполне удобно, провод пока ни разу не порвался в процессе намотки и натяжение провода постоянное. Все проблемы первой версии исправлены и появились наработки для того, чтобы в будущем сделать станок уже с автонамоткой. Но, как я уже писал, для автонамотки требования к станку значительно выше и конструктивные решения будут совсем другими, иначе не получится выдержать точный шаг и укладка провода будет идти плохо.
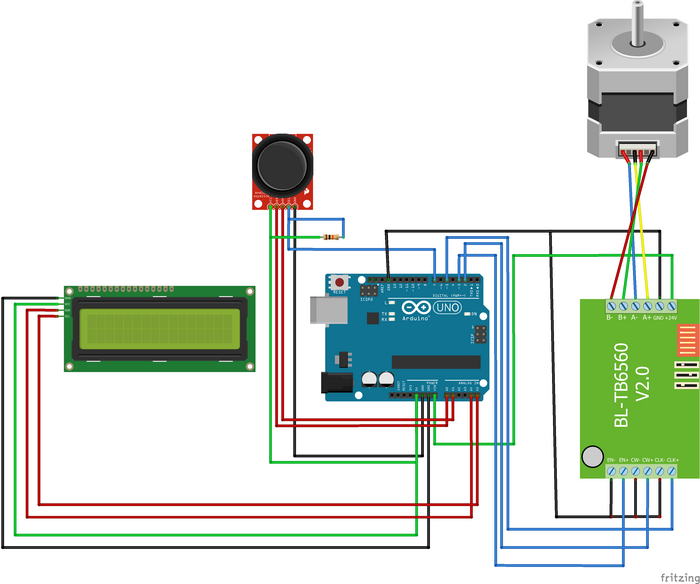
Общая схема электронной начинки станка выглядит так:
В меню станка есть 2 настройки: число витков и скорость намотки. Запуск двигателя происходит плавно с ускорением, а остановка с замедлением, что исключает возникновение ударной нагрузки на провод. После того, как заданное число витков намотано - двигатель останавливается, а намотанное количество запоминается - это позволяет мотать катушку в несколько этапов и по завершении каждой итерации на экране будет высвечиваться точное число намотанных витков на катушке.
Метод runToPosition() является блокирующим, так что подсчёта витков в режиме реального времени нет. Данный метод не рекомендуется вызывать в цикле, как сделано у меня - в библиотеке AccelStepper есть асинхронные методы, которые предназначены для вызова в цикле, но нужно обеспечить при этом быструю работу самого цикла. В моём случае такой возможности нет, так как та же операция обновления экрана не очень быстрая, а ещё нужно проверять состояние кнопок с поправкой на дребезг контактов. Можно добавить ещё одну плату Arduino только для управления двигателем и обеспечить уже там быстрый цикл, а первую плату оставить на пользовательский интерфейс и настроить обмен информацией между ними, тогда должно получится отображать число намотанных витков уже в процессе намотки без ущерба скорости вращения двигателя, но в данном станке такую доработку выполнять я не планирую.
Результат работы намоточного станка
С помощью данного намоточного станка я успешно изготовил первые образцы звукоснимателей и теперь они проходят испытания:
Он же в одной из моих электрогитар:
Про сами звукосниматели рассказывать пока рано - ещё предстоит много экспериментов, измерений и доведений до ума. Но если будет интересно, в будущем напишу статью и на эту тему.
Пожалуй, немалая часть моих читателей так или иначе интересуется DIY-тематикой. И в различных самодельных девайсах порой есть необходимость вывести какую-либо информацию на дисплей, будь это текст, графики или даже какая-то анимация! Для разных задач существуют самые разные дисплеи и в сегодняшнем материале я хотел бы систематизировать и собрать подробнейший гайд об использовании дисплеев с нерабочих мобильных телефонов: какие бывают протоколы и шины данных, как читать схемы устройств и определять контроллеры дисплеев, какие дисплеи стандартизированы, а какие придётся реверсить самому и как быть с подсветкой. В практической части статьи мы подключим дисплей используя протокол MIPI DBI к RP2040 с использованием DMA. Интересно? Тогда добро пожаловать в статью!
❯ Виды дисплеев и их протоколы
Пожалуй, ЖК-дисплеи с самого момента их появления стали основным инструментом для вывода информации и взаимодействия с пользователями. Первые ЖК-панели были монохромными и требовали отдельный драйвер, который занимался выводом изображения на экран и формированием необходимых для его работы напряжений.
Сейчас же всё гораздо проще и каждый любитель DIY-электроники может и сам подключить дисплейчик к своему проекту и использовать в необходимых ему целях. Ведь не зря написаны десятки библиотек по типу AdaFruit LCD, которые упрощают задачу программисту и дают ему возможность оперировать готовыми и простыми операциями по типу «вывести линию» или «отрисовать изображение». Однако, готовые библиотеки — это, конечно, здорово, но они не всегда дают понимание о том, как работают такие дисплеи на программном и аппаратном уровне. И первая часть статьи как раз и будет посвящена этому.
Всего в мире дисплейных матриц существует несколько общепринятых аппаратных протоколов. Некоторые из них можно легко использовать в собственных проектов с микроконтроллерами, с другими придется повозиться:
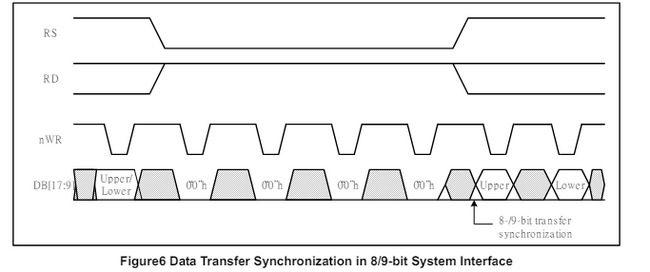
Параллельная шина 8080 — одна из самых простых и понятных шин данных, как в теории, так и на практике. Суть её очень простая: на каждый бит отводится по одной сигнальной линии, плюс две дополнительные линии для сообщения статуса передачи: RD означает запрос чтения, а WR — запрос на запись. Большинство дисплеев использует девятый, неявный бит D/C, который сообщает контроллеру, задаём ли мы номер команды, или уже пишем аргументы для этой команды. Что самое приятное — шина по сути стандартизирована и во многих дисплеях команды на старт записи в видеопамять, а также получение ID-контроллера идентичны. Шина бывает 8-битной и 16-битной (её состояние задаётся битами IM0..IM2 и используется не только для подключения дисплеев, но и микросхем параллельной флэш-памяти, ОЗУ и т. д. Такие шины используются в дисплеях с разрешением до 480x320.
SPI — шина, которая наверняка знакома большинству моих читателей. Достаточно простая — у нас есть две сигнальные линии с входным (MISO) и выходным (MOSI) битом, плюс сигнал тактирования, который согласовывает передачу данных. Таким образом, шина получается полнодуплексной. Фактически, каждый байт передаётся по одному биту через одну сигнальную линию, что, по сравнению с 8080, заставляет повышать тактовую частоту контроллера SPI, но при этом занимает гораздо меньше пинов самого МК или процессора. В программном плане, большинство дисплеев представленных в различных интернет-магазинах полностью совместимы с дисплеями 8080, ведь SPI — просто один из режимов работы. Единственный нюанс — из SPI дисплея не всегда можно вычитать ID-контроллера и вообще что-либо читать из регистров дисплея.
I2C — относительно редко используемая шина для дисплеев из-за её невысокой производительности, однако, тем не менее, очень подходящая для МК (благодаря использованию только двух сигнальных линий — SDA для данных и SCL для тактирования. Даже чипселект здесь программный благодаря тому, что каждое устройство имеет собственный адрес!), однако её можно найти в дисплеях некоторых телефонов из самого начала 2000-х годов.
TTL/параллельный RGB — тут, в общем-то, меня упрекали пару раз из-за того, что я продолжаю называть её TTL, но так сложилось исторически — даже в даташитах эту шину называют именно так. С логической точки зрения она очень простая: у нас есть 16/24 сигнальные линии, где 5 (или 8) бит используются для красного и синего канала и 6 (или опять же 8) бит используются для зеленого цвета (т. е. в 16-битном цвете у нас RGB565, а в 24-битном — RGB888). К ним идут сигналы HSYNC для горизонтальной синхронизации и VSYNC для вертикальной. Вообще, необязательно использовать все сигнальные линии предоставляемые дисплеем — можно использовать, например, RGB332 и использовать всего 8 сигнальных линий. Однако для отображения картинки, необходимо строго соблюдать тайминги синхронизации, иначе дисплей будет просто показывать белый цвет. Помимо цифрового варианта, бывает также аналоговый, очень похожий на телевизионный RGB или VGA. Такие дисплеи обычно используются для матриц до 1024x768 включительно.
MIPI DSI — протокол, используемый для дисплеев высокого разрешения — от 480x800 и выше, его можно встретить в большинстве современных смартфонов и планшетов. Кроме того, такие дисплеи используют относительно мало пинов — по два на каждый канал LVDS (обычно в смартфоне около двух-четырех каналов) + две сигнальные линии на тактирование. Звучит всё хорошо? Как-бы не так: протокол дифференциальный и на каждый канал (т. е. логический бит) приходится по две сигнальные линии — одна с положительная, а вторая отрицательная. Затем одна вычитается из другой и получается окончательный сигнал, а сделано это для уменьшения помех от передачи данных по нескольким линиям с очень высокой тактовой частотой без увеличения битности шины.
LVDS/eDP — Протоколы, используемые в матрицах ноутбуков, телевизоров и иногда планшетов. На физическом уровне близки к DSI, на программном — если честно, не знаю, но наслышан о некой стандартизации и высоком уровне совместимости. Даже «неродные» ноутбучные матрицы вполне «заводятся», максимум после перепрошивки родной EEPROM, даже если дисплей другого разрешения!
В списке выше, мы рассмотрели несколько популярных аппаратных шин для дисплеев. В данной статье, мы разберемся в программных особенностях таких дисплеев и узнаем, где взять по дисплею одного из следующих типов: SPI, I2C, а также 8080.
❯ Виды дисплеев и их протоколы
Пожалуй, писать статью, где были бы только готовые примеры без объяснения принципов работы «под капотом» было бы плохим тоном. Поэтому предлагаю немного разобраться в системе команд для самых распространенных контроллеров дисплеев в наше время.
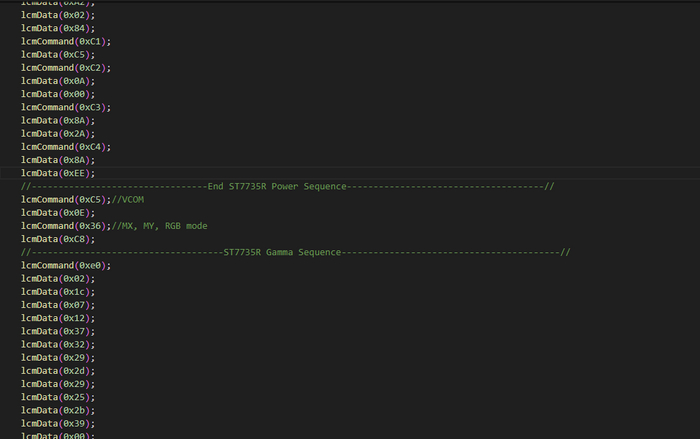
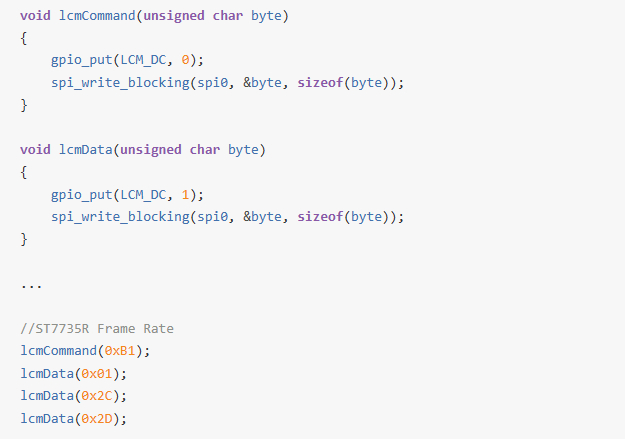
У рассматриваемых нами дисплеев есть собственная видеопамять, благодаря чему нет необходимости соблюдать тайминги, а также общий набор команд (или аппаратных регистров), которые мы можем записывать и тем самым менять поведение дисплея. Если мы просто подадим питание на дисплей и попытаемся что-то вывести — у нас ничего не выйдет, поскольку при каждом аппаратном RESET'е, состояние большинства регистров, кроме SleepOn и PowerOn не определено и может содержать в себе любой «мусор». Для корректной работы дисплея, нам необходимо послать определенный набор команд, называемый инициализацией, который установит настройки драйвера дисплея, такие как контраст, параметры цветности, направление развертки изображения из VRAM и т. д. Пожалуй, стоит сразу отметить, что некоторые люди называют регистры дисплея командами — это означает одно и тоже!
Пример инициализации. На самом деле, не все люди делают такую простыню из вывозов функций чтения/записи регистров дисплея, поскольку это кушает драгоценный ROM. На AVR, например, команды инициализации можно хранить в ROM и читать из PROGMEM.
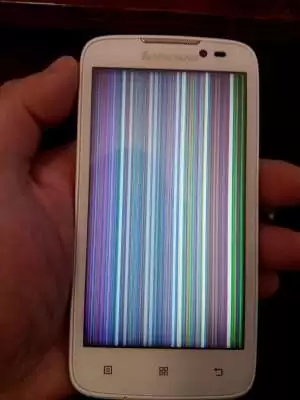
Если дисплей инициализирован неправильно, то мы можем наблюдать некорректную развертку, артефакты на дисплее и полосы: если вы когда-нибудь прошивали смартфоны прошивками других ревизий, то могли замечать подобный эффект сами.
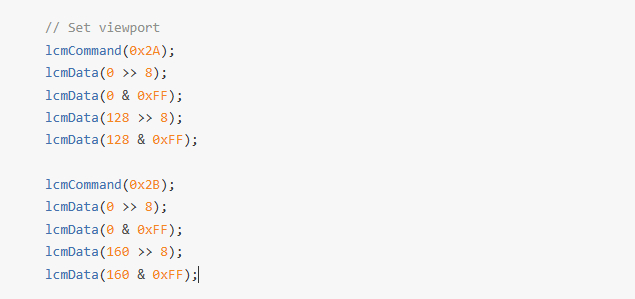
Набор команд для контроллеров дисплеев частично стандартизирован спецификацией MIPI DBI, которая описывает и закрепляет некоторые конкретные адреса регистров, общие для всех контроллеров дисплея. К ним относится, например, установка «окна» для записи (0x2B и 0x2A), sleepout (0x11) и некоторые другие. Проприетарными командами остаются настройки питания, развертки, контраста и самого драйвера дисплея. Ну и всяческие LUT, а также палитровые режимы (если они есть) тоже проприетарные.
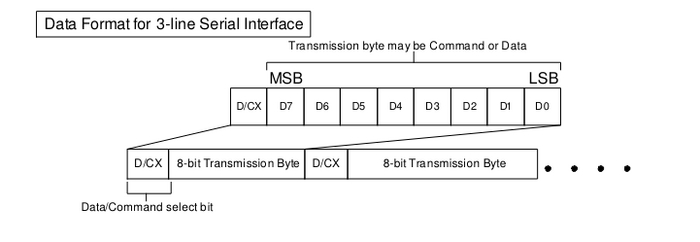
Пример одной из таких стандартизированных команд:
Почти во всех дисплеях есть разделение отправляемых байтов на команду (или выборка номера регистра для чтения/записи) и на данные. Как обработать текущий байт определяет отдельный пин (или бит, в зависимости от конфигурации дисплея), называемый D/C (Data/Command), иногда также можно встретить названиеRS. Обычно, при записи команды, D/C должен быть на низком уровне, при записи данных, соответственно, на высоком. Суть простая: записываем номер команды (или регистра) при низком D/C, а затем дописываем необходимые аргументы (или конфигурацию регистра) при высоком уровне D/C. Примерно так:
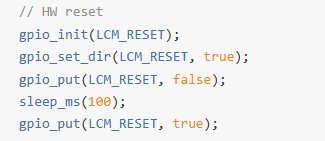
Касательно сброса, то в дисплеях обычно существуют два вида этого процесса: аппаратный сброс через соответствующий пин и программный с помощью специальной команды. Пин RESET никогда нельзя оставлять в «воздухе» (т. е. не подключенным) в надежде что «да состояние пинов МК после ресета известно, мусора на шине явно не будет». Мусора может и не будет, а вот дисплей упадет в вечный ресет, поскольку ожидает перехода сигнала RESET в высокий уровень. Тоже самое касается и пина CS, отвечающий за выбор устройства на шине. Если вам не нужен CS и у вас висит только одно устройство на шине — просто притяните его к массе. Некоторые контроллеры (например, ILI9325) адекватно реагируют на CS «в воздухе», некоторые — нет. Только после того, как RESET оказался на высоком уровне, дисплей начнёт принимать команды:
Переходим конкретно в выводу данных. Для начала вывода изображения на дисплей, нам необходимо выполнить команду 0x2C, которая переведет контроллер дисплея в режим записи данных в видеопамять. После этого, нам остаётся лишь установить высокий уровень на пине D/C и просто слать непрерывный поток пикселей. Контроллер дисплея сам инкрементирует координаты на дисплее и после того, как координаты выйдут за границы нужной области, дисплей сам их переведет в изначальные. Таким образом, достаточно лишь один раз проинициализировать дисплей и просто гонять в него данные, например, с помощью DMA.
Всё просто и понятно :)
❯ Дисплеи с шиной 8080
Пожалуй, подобные дисплеи найти проще всего, поскольку они использовались в большинстве кнопочных телефонов из нулевых. Такие экранчики можно встретить во многих моделях Nokia, Samsung, LG, Fly, Sony Ericsson и большинстве китайских телефонов. С поиском распиновки и разводкой таких дисплеев всё относительно просто и одновременно сложно: на некоторые модели телефонов (например, почти на все Nokia) можно свободно найти схему в гугле и узнать распиновку коннектора дисплея… однако этот коннектор сначала надо сдуть и развести на breakout-плате, или под микроскопом вывести перемычки. В некоторых случаях (например, Siemens S-серии), дисплей просто прижимался к контактам на плате, а сами контакты имели более чем паябельный шаг.
Из схемы на Nokia N70. Этот дисплей применялся во многих Symbian-смартфонах Nokia тех лет: N-Gage/N-Gage QD, N70, N72, 6600 и некоторых других.
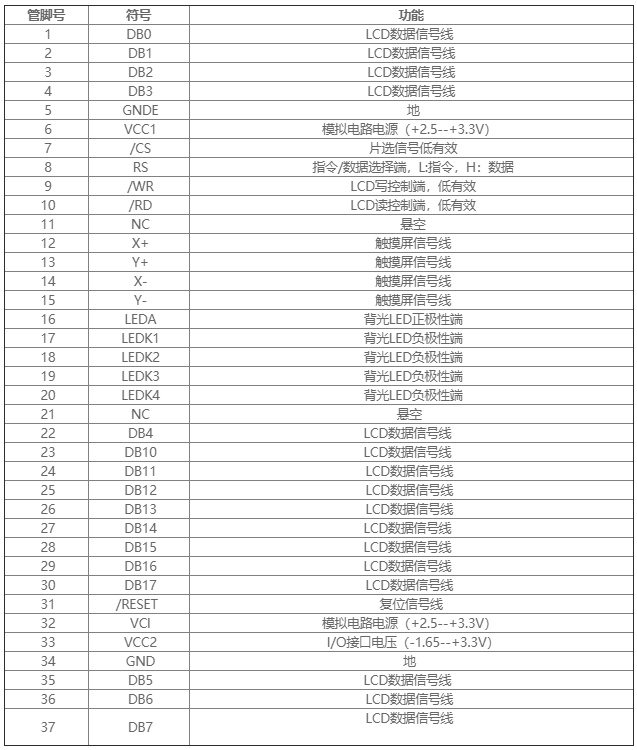
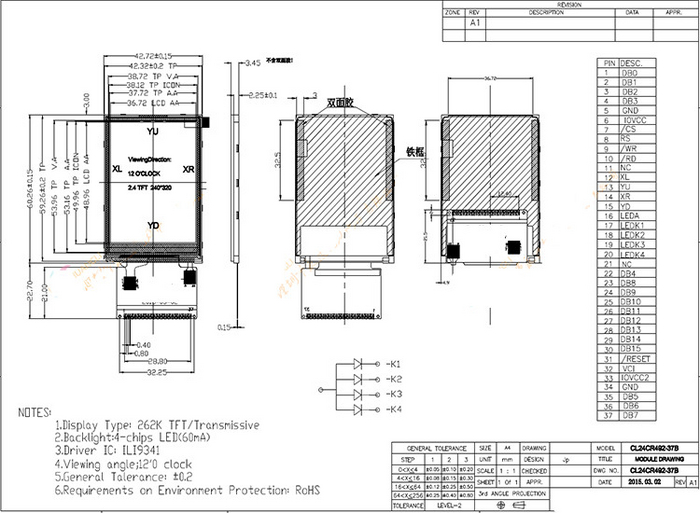
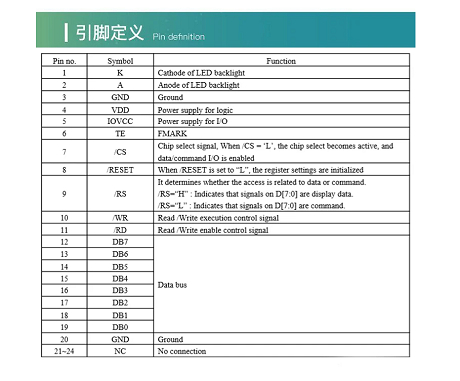
Но особо удобными можно считать дисплеи с паябельными шлейфами с большим шагом пинов — такие можно встретить в некоторых телефонах Samsung и большинстве китайских телефонов. Пытливый читатель спросит «так это ж китаец, где ты на него схему будешь искать?». И вот тут, китайские производители нас приятно порадуют, поскольку за редким исключением, такие дисплеи имеют стандартизированную распиновку: лично мне известны матрицы 37 Pin, 39 Pin и 44 Pin. Как найти для них распиновку? Пишем на «алике» или «таобао» 37 pin lcd tft и смотрим: в описании продавец частенько прилагает распиновку (правда учтите, что 37 pin не имеет пинов IM для настройки ширины шины, а 16-битный интерфейс может быть слишком прожорилвый по числу пинов):
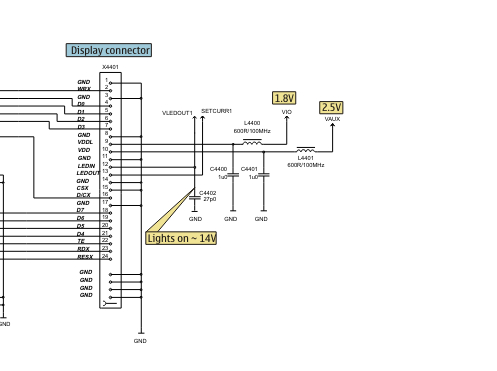
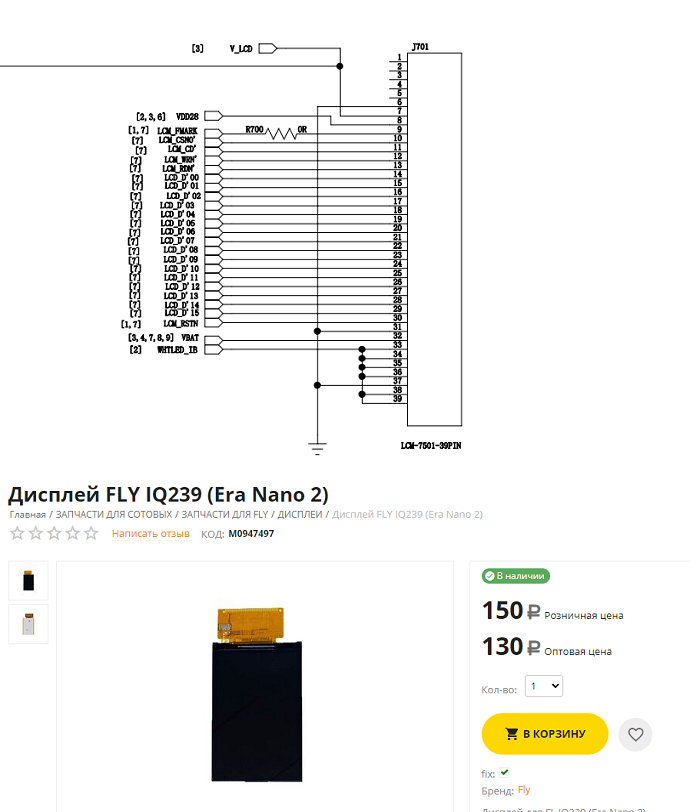
В случае с китайцами, иногда можно найти и схему (нажимайте на зеленую стрелку) на устройство: например, почти на все модели Fly схемы лежат в свободном доступе, где почти всегда можно найти распиновку дисплея. Иногда производитель даже выводит тестпоинты на все сигнальные линии и дисплей с тачскрином можно использовать, не выпаивая его с платы!
Распиновка на Fly IQ239. На нижней части изображения, вы можете увидеть, что такие, безусловно, здоровенные дисплеи можно купить за копейки и сейчас :)
Но задумывались ли вы когда-нибудь, откуда на тачскринах в дисплеях с «али» взялись кнопки «домой», «сообщения», «телефон»? Это ведь те самые дисплеи, которые использовались в «ноклах», просто припаянные к удобной плате! :) Кроме того, на китайские дисплеи без проблем можно найти даташит: обычно они используют контроллеры от ST или ILI, в зависимости от разрешения дисплея.
Концептуально, аппаратная реализация протокола одновременно простая и понятна любому: программа устанавливает состояние каждого бита передаваемого байта на сигнальных линиях D0..D7 (либо D00..D15, если шина у нас 16-битная), а затем просто «дёргает» линию RD (Read или чтение), либо WR (Write или запись) по переходу из низкого уровня в высокий, благодаря чему контроллер дисплея понимает, что байт (или слово в случае 16-битного интерфейса) можно «забирать» с шины. По переходу из высокого уровня в низкий, контроллер снова переходит в режим ожидания следующего байта с шины.
Где взять такие дисплейчики? Да почти везде! Но лучше всего брать дисплеи с китайчиков, которые можно развести на вот таких breakout-платах, которые можно заказать на алике за пару сотен рублей.
Обратите внимание на то, как по свински припаивают подсветку на некоторых дисплеях. И это завод! Лучше сразу прозвоните прежде чем подавать питание. Я, вот, забыл, понадеялся на производителя и по итогу сжёг подсветку :(
Другой вопрос, где искать на них информацию? Помимо схем, можно просто поискать на алике «37 pin lcd tft», «39 pin tft lcd», «24 pin tft lcd» и т. п. Обычно продавцы сами выкладывают распиновку и даже прикладывают ID контроллера дисплея. Поскольку иногда различия в распиновках всё же попадаются, обращайте внимание на то, куда у вас идут дорожки от подсветки и от резистивного тачскрина (если есть), а также вызванивайте все пины с массой — это поможет подобрать правильную распиновку без логического анализатора. Вот, например, дисплейчик из китайской нерабочей реплики Nokia 130 с здоровым 2.4" дисплеем… казалось бы, вообще не понятно что за дисплей, однако воспользовавшись смекалкой, мы находим его распиновку!
❯ SPI-дисплеи
SPI-дисплеи в телефонах встречались относительно редко. В основном, подобные дисплейчики можно было найти в моделях начала 2000х годов: сименсах, моторолах, ранних сонериках T-серии и Nokia на S40. Иногда SPI-дисплеи можно встретить в современных кнопочных телефонах — обычно они имеют шлейф с менее чем 15 пинами, как некоторые модели Fly. Обычно контроллер дисплея поддерживал сразу несколько аппаратных шин, а производитель телефона ещё на этапе установки шлейфа к контроллеру дисплея замыкал необходимые IM-пины выбирая необходимую шину, поэтому программный протокол фактически идентичен дисплеям с шиной 8080.
Несомненным плюсом SPI-дисплеев можно назвать малое число пинов для работы с матрицей: достаточно всего два (плюс сигнал D/C, если дисплей не 9-битный), если повесить RESET на VIO, либо три (четыре), если хотите управлять аппаратным RESET вручную. Но есть и, в некоторой степени, минусы: например, не все микроконтроллеры умеют работать в 9-битном режиме и возможно последний бит придётся досылать «ногодрыгом» (что ломает любую возможность реализации DMA).
Многие дисплеи с этим интерфейсом задокументированы ещё в начале 2000х годов на известных форумах и сайтах, таких как VRTP, Радиокот и easyelectronics, поэтому проблем с их подключением не возникнет даже у новичка. Даже такой крутой и уважаемый дядька, как @DIHALT, когда-то писал полезный материал об использовании FSMC в STM32.
Достать их новыми можно и сейчас: различные магазины запчастей для телефонов бывают продают их по 20-30-40 рублей… Я недавно себе целую коробочку накупил, в том числе и просто для ремонта смартфонов для будущих статей :)
❯ I2C-дисплеи
Дисплеи с такой шиной — настоящая редкость и обычно попадались в телефонах самого начала нулевых годов с низким разрешением дисплея. Из известных мне — Ericsson'ы и ранние Sony Ericsson T-серии, ODM Motorola (головастики например) и… пожалуй всё. Казалось бы, разве I2C может быть полезен для работы с дисплеями, где требуется активный вывод графики? Ведь он совсем медленный! Однако, даже он может пригодится для некоторых проектов, а в большинстве МК частенько попадается аппаратный TWI.
Кроме того, I2C дисплейчики удобно отлаживать: благодаря тому, что периферийное устройство должно отрапортовать ACK (состояние успешности получения байта) мастер-устройству, можно сразу определить обрыв линий до дисплея. Но какой-то конкретной информации по ним я не смогу написать — они все совсем разные :( Правда, полезным линком поделюсь, ребята с форума VRTP собрали хорошую таблицу с различными контроллерами дисплеев, где бывают и i2c!
❯ Подсветка
Отдельного радела стоит тема подсветки дисплеев. По первой может показаться, что тут всё просто: современным дисплеями достаточно 5В, а на старых можно замерить напряжение бустера на живом девайсе и смастерить свой DC-DC повышающий преобразователь, или взять, например, уже готовый драйвер, как известный в определенных кругах LTYN. На самом деле и тут есть свои нюансы.
Итак, каким образом реализована подсветка в том или ином устройстве? Обычно её реализация заключается в последовательном соединении двух и более светодиодов, которые формируют небольшую ленту под рассеивающей плёнкой. На современных китайских дисплейчиках, для работы в полную яркость достаточно всего лишь 5В источника питания + токоограничивающего резистора. Но что самое приятное, подсветка в таких дисплеях способна работать и при 3.3В, пусть менее ярко, но всё равно вполне читабельно.
Если вы делаете портативное маломощное устройство, работающее от одного Li-Ion аккумулятора, то достаточно лишь пустить 3.3В с линейного стабилизатора, который формирует напряжение VSYS для микроконтроллера. Таким образом, у вас будет стабильная подсветка среднего уровня яркости. В качестве альтернативного «бомж» варианта, когда нет возможности собрать нормальный драйвер подсветки, можно попробовать подключить светодиоды напрямую к АКБ, но при разряде дисплей будет потихоньку «тухнуть». Ещё один «бомж» вариант — разобрать дисплейный модуль, порезать дорожки на ленте и соединить пару светодиодов параллельно, выведя их через отверстие, откуда выходит шлейф дисплея, однако в таком случае, потребление подсветки заметно увеличится.
Правильным выходом будет взять с того-же телефона бустер подсветки с индуктивностью и иной необходимой обвязкой, и собрать бустер самому. Особой популярностью когда-то пользовались вышеупомянутые LTYN из телефонов Samsung (это маркировка известного драйвера LT1937). Уровнем подсветки на подобных бустерах телефоны управляют с помощью встроенного ШИМ-контроллера, чем можете воспользоваться и вы :)
❯ Запускаем дисплейчик на практике
В первой части статьи, я постарался ввести вас в курс дела и кратко рассказать о том, как работают такие дисплейчики «под капотом». Как видите — с теоретической точки зрения, ничего сложного нет: пересылаем данные на дисплей, да вовремя дёргаем пин D/C. Но какого же это на практике?
К сожалению, у меня на руках не нашлось подходящего дисплейчика от мобильного телефона (я ведь брал новые по уценке, не все заработали нормально), поэтому в качестве примера работы мы возьмём фактически такой же «китайский» дисплей с алика. Но будьте уверены — с большинством дисплеев, принцип работы будет идентичен (если мы говорим о дисплеях 2005г.в и моложе).
В качестве МК, мы возьмём мой любимый RP2040, который, по моему мнению, незаслуженно обделен вниманием. Время от времени я делаю всякие прикольные девайсы на базе этого МК, поэтому крайне рекомендую его всем моим читателям :)
Давайте же перейдем к практической части статьи! Обычно при создании проекта, я просто клонирую с гита RPi сэмплы с уже готовыми файлами CMake, беру hello world, конфигурирую CMakeLists.txt и пишу свою программу. На малинке пока что нет такого удобного способа создания проекта, как idf.py create-project :) Само собой, для удобства отладки я всегда включаю встроенную в чипсет эмуляцию UART через USB.
if (TARGET tinyusb_device) add_executable(hello_usb main.cpp )
# pull in common dependencies target_link_libraries(hello_usb pico_stdlib hardware_spi)
# create map/bin/hex/uf2 file etc. pico_add_extra_outputs(hello_usb)
# add url via pico_set_program_url example_auto_set_url(hello_usb) elseif(PICO_ON_DEVICE) message(WARNING "not building hello_usb because TinyUSB submodule is not initialized in the SDK") endif()
И инициализирую USB-стек и биндинги stdout к нему:
stdio_init_all(); sleep_ms(1000);
Задержка здесь важна, иначе девайс отказывается определятся в системе. Переходим, собственно, к разводке дисплея. Для работы нам достаточно лишь питания, подсветки, общей массы и четырёх сигнальных линий: MOSI, CLK, DC, RESET. На CS я обычно ставлю перемычку с массой, т. к обычно не вешаю что-то ещё на одну шину с дисплеем.
Переходим к инициализации дисплея. Наш экранчик работает на базе контроллера ST7735R и имеет разрешение 128x160. Сначала, назначаем функции для пинов и дёргаем RESET:
Весьма негусто скажете вы? Ну, с минорными изменениями, здесь заработает дисплейчик любого разрешения, даже 480x320! Переходим к фактической инициализации:
Прошиваем наш МК и смотрим что получилось. Видим шум на экране? Значит дисплей инициализирован верно!
После инициализации дисплея, мы можем выводить на него данные! Дабы дать возможность процессору заниматься другими делами во время передачи картинки на дисплей, мы настроим один из DMA-каналов. DMA-контроллер занимается пересылкой данных из ОЗУ в другой участок ОЗУ (аппаратный memcpy) или периферию. Как раз для второго случая, т. е. пересылки данных в контроллер SPI, мы и будем использовать DMA!
Аллокейтим фреймбуфер, куда мы будем выводить нашу картинку и настраивает DMA-канал:
Переходим к выводу изображения на дисплей. Для того, чтобы просто установить цвет пикселя в любых координатах экрана, достаточно лишь посчитать смещение от начала указателя на фреймбуфер к определенным координатам экрана. Формула очень простая и понятная: ширина дисплея * Y-координата + x координата и результат предыдущих операций помноженный на число байт в одном пикселе.
__inline void pixelAt(short x, short y, short color) { if(x < 0 || y < 0 || x >= LCM_WIDTH || y >= LCM_HEIGHT) return;
В функции есть валидация границ дисплея. Если уверены, что не зайдете за границы дисплея — можете убрать проверку, будет шустрее.
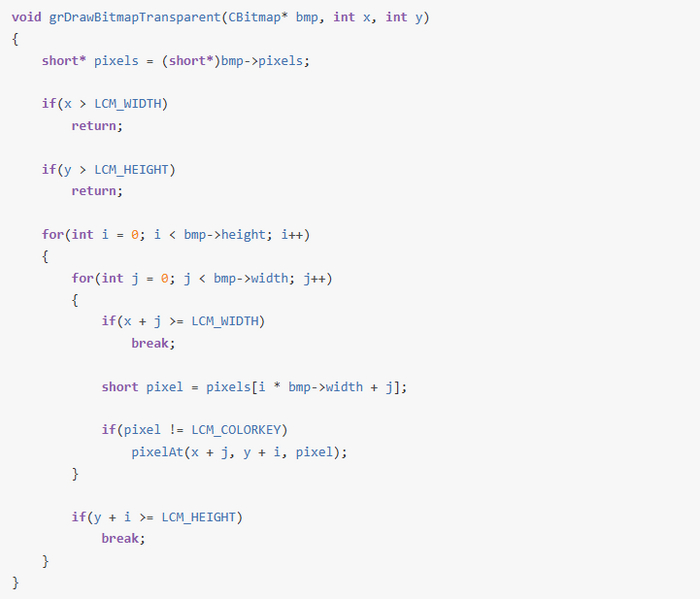
Теперь для вывода картинки, нам достаточно лишь скопировать изначальное изображение в наш фреймбуфер и попросить DMA-канал вывести изображение на дисплей. Для прозрачных картинок без альфа-канала (т. е. с цветовым ключом), функция будет выглядеть так:
Можно сделать чуть комплекснее, добавив альфа-блендинг и аффинные трансформации (возможность поворота и скейла картинок), но пока-что такой задачи не стоит. Ну что, всё очень просто и понятно? :) Пример прошивки можно найти на моём GitHub!
Производительность такого способ на RP2040 можно увидеть вот в этом видосе (на Пикабу не смог залить из-за ограничения на число медиа-элементов). Обратите внимание, что подход предложенный выше больше подходит именно для динамического вывода изображения без dirty-регионов. Он подойдет для игровых консолей, камер, анимаций или устройств с выводом динамической информации по типу осциллографов. Если вам нужно обновлять картинку реже, например, если вы делаете умные часы с плеером, то нет необходимости занимать довольно большой объем ОЗУ фреймбуфером, ведь вы можете писать напрямую в видеопамять. Тут уже решать в зависимости от конкретной ситуации именно вам :)
❯ Заключение
Вот мы с вами и систематизировали информацию о том, как использовать дисплеи с мобильных телефонов в своих проектах. Надеюсь, информация была достаточно полезной для вас! Однако, у меня к вам просьба: пожалуйста, не «дербаньте» рабочие девайсы «на запчасти» :( Это будет не очень гуманно по отношению к нашему «технобалдежу», где мы наоборот стараемся найти применение стареньким девайсам :)
Был ли для вас материал полезен? Пишите в комментариях.
Полезный материал?
Какие дисплейчики подключали?
❯ Важное объявление для читателей касательно будущей рубрики
Друзья! Я, как и многие мои читатели, помимо программирования и железа обожаю тачки! Особенно те тачки, где что-то нужно доделывать самому… и речь, конечно-же, о ТАЗах! Я долго думал, но всё же решился: сейчас я коплю на будущий интересный проект, связанный с ультрабюджетным электронным дооснащением автомобиля, который старше меня в полтора раза — скорее всего, речь пойдет о ВАЗ 2108/2109/21099, причём не исключено что карбюраторной! В планах довольно крутой проект, заключающийся в следующем: мы спроектируем очень дешевый бортовой компьютер (т.е панель) для управления автомобилем на базе дешевого Б/У планшета за пару сотен рублей. Планшет будет связан с управляющим МК через UART (о подобной коммуникации через хардварные протоколы я уже писал целых две статьи: сам себе Linux смартфон, превращаем планшет с нерабочим тачскрином в игровую консоль), и с планшета мы сможем не только управлять основными системами машины (стеклоподъемники, центральный замок и соленоид багажника), но и собирать и пытаться примерно посчитать некоторую информацию о расходе, километраже и стабильности работы двигателя на карбюраторной(!) машине без электронных систем с завода!
Если вдруг двигатель машины будет живенький и заводиться с полтычка, то может и удаленный прогрев постараюсь реализовать :)
В наши задачи будет входить не только проектирование аппаратной части такого оснащения, но и разработка симпатичного интерфейса для самой панели, дабы было не хуже чем в BMW :D Всеми схемами, исходным кодом и инструкциями я буду делится с вами в каждой статье и, как обычно, расскажу обо всех деталях реализации во всех подробностях! У меня уже есть некоторые идеи и наработки. Собственно, почему-б и не попробовать? Будет новая рубрика в блоге: апгрейд автомобилей глазами электронщика и прожженного программера.
Фото не моё, из интернета
Если вам нравятся мои статьи, вас интересует развитие такой рубрики и у вас есть желание и возможность — можете помочь проекту копеечкой с помощью формы доната ниже. Пикабу позволяет остаться анонимным и донатить даже без регистрации. Сейчас у меня есть 40 тысяч рублей личных накоплений, на покупку самой машины планирую выделить 70-80 тысяч рублей (я живу в Краснодарском крае, так что здесь ещё есть шансы найти что-то +- живое за такие деньги), так что остаётся собрать около 30-35 тысяч рублей. За каждую копейку я готов отчитаться (по факту покупки машины я сделаю пост с фотографиями авто, ДКП, а также оглашу фронт будущих работ и сразу начну заниматься проектом).
Всем привет, моему Wall-E уже почти 9 лет и он уже давно пылится на полке, но интерес к нему все еще есть!! Это радует! Что же, если это кому то поможет или подтолкнет к каким-то своим поделкам я буду очень рад.
Я выложу в доступ все что у меня по нему уцелело. Там не так много материалов и нету схем, так как все это делалось интуитивно и в основном держалось в голове, но код очень прост и, местами даже с комментариями, вы без проблем сможете все воссоздать из него.
Не пугайтесь большого количества проводов - для того что показано в его техно демке многое не нужно, что то делалось на вырост, что то просто потому что было и с этим хотелось научиться работать.
Задумывалось гораздо больше возможностей, но моего запала тогда на это не хватило, а сейчас уже лучше начать с нуля.
Наверное это был один из самых интересных моих проектов, и я бы с удовольствием его продолжил, если бы это не было так затратно…
Если сейчас приехать в пункт приема металлолома, то можно обнаружить просто огромные кучи различных телефонов и прочих электронных «отходов», которые стоят под открытым небом и ждут, когда придёт их черёд окончательного разложения. Однако при ближайшем рассмотрении выясняется, что многие девайсы оказываются полностью рабочими даже после недельного лежания под палящим солнцем и проливными дождями, а сдали их в чермет по причинам «не нужен, надоел, купил новый» и т. п. Я не считаю это правильным, ведь даже в простые кнопочные звонилки имеется возможность вдохнуть новую жизнь, если знать один интересный, но малоизвестный факт: для них можно писать нативные приложения на C и использовать железо телефона в своих целях. А это, на минуточку, как минимум: дисплей с подсветкой, вибромотор, динамик, клавиатура и GSM-радиомодуль с возможностью выхода в сеть. Сегодня мы с вами: узнаем, на каких аппаратных платформах работают китайские телефоны, какие существуют программные платформы и где взять для них SDK, а в практической части мы напишем 2D-игру с нуля, которая будет работать на многих китайских кнопочниках. Интересно? Тогда жду вас под катом!
Содержание:
Не J2ME едины
Аппаратные ресурсы
Кроссплатформенный рантайм
Кроссплатформенный рантайм: Win32
Кроссплатформенный рантайм: MRE
Кроссплатформенный рантайм: VXP
Наконец-то пишем игру
Тестируем на реальных девайсах
Заключение
❯ Не J2ME едины
Думаю, многие мои читатели помнят о такой платформе, как J2ME. Java-приложения стали фактически основной возможностью расширения функционала телефонов в 2000-х годах. API для них был достаточно хорошо стандартизировано, программы не зависели от архитектуры процессора и ОС устройства, а порог вхождения для написания собственных приложений был довольно низкий и даже новички могли за пару дней написать свою игрушку или какое-нибудь GUI-приложение!
Однако не одним J2ME мы были едины: существовало множество платформ, которые так или иначе пытались занять нишу Java на рынке. Некоторые из них я упоминал в своей прошлой статье о написании 3D-игры под Sony Ericsson с нуля: например, была такая платформа на телефонах Sony Ericsson серии T, как Mophun, а CDMA-телефонами с чипсетами Qualcomm использовалась нативная платформа BREW. Пожалуй, я не буду упоминать о .sis и .cab — поскольку это форматы нативных приложений для смартфонов, а не простых «фичефонов».
В какой-то момент, ближе к 2006-2007 году, прилавки российских официальных ритейлеров (по большей части это были телефоны Fly) и неофициальных продавцов на рынках заполонили различные китайские телефоны, которые предлагали какой-то немыслимый функционал для тех лет за копейки, да ещё и визуально напоминали флагманские модели известных брендов. Пожалуй, одним из самых популярных таких телефонов была Nokla TV E71/E72 (да, именно «нокла»), вышедшая примерно в 2008 году и производившаяся аж до 2011 года! За 2-3 тысячи рублей (это менее 100 баксов), пользователь получал здоровый 2.4" дисплей с разрешением 240x320 весьма неплохого качества (когда в те годы многие продолжали ходить с 176x220), да ещё и с тачскрином, гироскоп, огромный громкий динамик (пусть и не очень качественный), поддержку SD-карточек до 32Гб, нередко фронтальную камеру, а также премиальный дизайн с вставками из алюминия. Частенько китайцы заботливо клали в коробку ещё чехольчик и дополнительный аккумулятор :)
Были даже полные копии существующих устройств от Nokia. Особенно китайцы любили подделывать массовые модели на S40: они были очень популярными и китайцы хотели откусить свой кусок рынка у Nokia. Пусть и рынка серого импорта — очевидно, в салонах связи подделки никто не продавал:
Но была и ложка дёгтя в этой бочке меда: китайские телефоны очень часто не имели поддержки Java, из-за чего многие пользователи разочаровывались в них из-за отсутствия возможности установить необходимые им приложения. Никакой тебе оперы, аськи, игр… Скорее всего, это связано с необходимостью отчислений Sun, а также разработчикам реализации J2ME-машины (JBed/JBlend) и установки чипа флэш-памяти чуть большего объёма.
Но многие пользователи не знали, что такие девайсы не просто поддерживали сторонние приложения, но и умели выполнять настоящие нативные программы, написанные на полноценном C! Всему помешала китайская костыльность и тотальная закрытость. Платформа предполагалась для работы на внутреннем рынке. Для вызова менеджера нативных приложений необходимо было вводить специальный инженерный код в номеронабирателе, предварительно скопировав приложение в нужную папку, а SDK долгое время было платным и доступно только для компаний из Китая. Кроме того, далеко не все приложения могли запустить на конкретном девайсе — были серьезные проблемы с совместимостью.
Всё как вы любите: HiTech-девайсы на фоне ковра, который старше автора лет на 30 :)
В ранних китайских телефонах использовалась платформа Mythroad (MRP, MiniJ) от китайской компании SkyWorks, которая лицензировала свою технологию производителям чипсетов. Поддержку MRP можно было встретить на телефонах с чипсетами MediaTek, Spreadtrum, а также MStar (и возможно Coolsand). Mythroad предоставлял некоторое API для работы с железом телефона и разработки как UI-приложений, так и игр, кроме того, Mythroad позволял хранить ресурсы в одном бинарнике с основной программой и даже имел какой-то интерпретируемый язык помимо возможности запуска нативного кода. Для работы таких приложений необходимо было скопировать менеджер приложений dsm_gm.mrp и игру в папку mythroad во внутренней памяти устройства или на флэшке, а затем набрать в номеронабирателе код *#220807#, иногда при отключенной первой SIM-карте. Костыльно? Костыльно! Откуда об этом знать среднестатистическому пользователю? Не откуда! Но работало!
Эта платформа поддерживалась на большинстве подделок под брендовые устройства Nokia, Sony Ericsson и Samsung, а также iPhone и на многих китайских кнопочных телефонах 2008-2010 годов.
Ближе к 2010 году MediaTek разработала свою собственную платформу, которая должна была заменить MRP — WRE (VXP). Эта платформа была гораздо шире с точки зрения функционала (например, был доступ к UART) и её API был вполне удобно читаем для программиста, а SDK свободно доступен для всех. Один нюанс всё портил — приложения без подписи привязывались к IMSI (даже не IMEI) симки в девайсе и на некоторых девайсах требовали переподписания под каждую конкретную SIM или патчинг дампа оригинальной прошивки телефона на отключение проверки подписи. Эта платформа поддерживалась на многих кнопочниках и смарт-часиках 2010-2020 годов: к ним относятся новодельные телефоны Nokia, телефоны DNS и DEXP, Explay и т. п. Для запуска приложений достаточно было выбрать файл с разрешением VXP в проводнике и просто запустить его. Но с совместимостью всё равно имелись проблемы: если запустить VXP для версии 2.0 и выше, мы получим лишь белый экран. Ну хоть не софтресет, и на том спасибо!
Далеко не все такие часы поддерживают MRE, смотреть нужно от устройства к устройству
❯ Аппаратные ресурсы
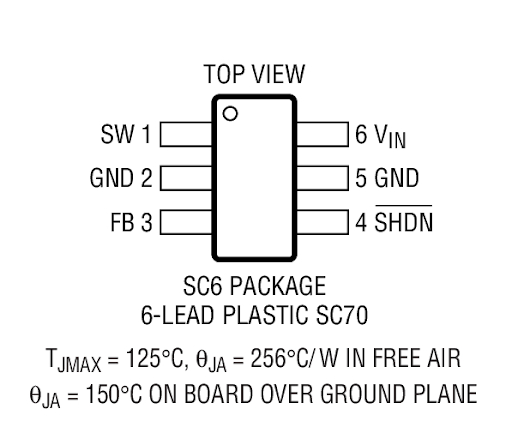
Большинство китайских кнопочных телефонов работает на базе одних и тех же чипсетов. В конце нулевых чаще всего использовались чипсеты MT6225, SC6520 и некоторые чипы от Coolsand. Средние хар-ки девайса были следующими:
Процессор: ARMv5 ядро на частоте ~104МГц, ARM926EJ-S. Нет FPU, есть Thumb. Большую часть процессорного времени программа могла забрать себе.
ОЗУ: ~4Мб SDRAM. Программам было доступно 512Кб-1Мб Heap'а. Это, в целом, довольно немало для большинства применений.
Флэш-память: ~32Мб, пользователю доступно пару сотен килобайт. Да, вы не ослышались, килобайт! Однако можно без проблем использовать MicroSD-флэшки до 32Гб.
Дисплей: от 128x128 до 320x480, почти всегда есть 18-битный цвет (262.000 цветов), в случае TV E71/E72 используется очень неплохая TN-матрица с хорошими углами обзора и яркой подсветкой. Иногда есть тачскрин.
Звук: громкий динамик, наушники.
Аккумулятор: ~800мАч, на некоторых девайсах может быть и 2.000мАч, а то и больше!
Ввод: клавиатура, иногда была поддержка QWERTY.
Внешние шины: почти всегда был доступен UART, причём его можно было свободно взять прямо с платы — он был явно подмечен! Взять GPIO с проца не выйдет (кроме, возможно, вибромотора), SPI и I2C также напрямую недоступны. Внешние шины можно реализовать с помощью UART через GPIO-мост из микроконтроллера.
В итоге мы получаем очень неплохие характеристики для устройства, которое сочетает в себе сразу всё. На базе такого девайса можно сделать и сигнализацию, и HMI-дисплей с интерфейсом для управления каким-нибудь устройством, и игровую консоль с эмуляторами… да на что фантазии хватает! И это за какие-то 200-300 рублей, если мы говорим о б/у устройстве или 600 рублей, если говорим о новом. Это дешевле, чем собирать девайс с подобным функционалом самому из готового МК (например, RP2040) и отдельных модулей. Кстати, дешевые 2.4" дисплеи на алике — это ни что иное, как невостребованные остатки дисплеев для подобных китайских телефонов на складах! А вы думали, откуда там значки на тачскрине снизу?
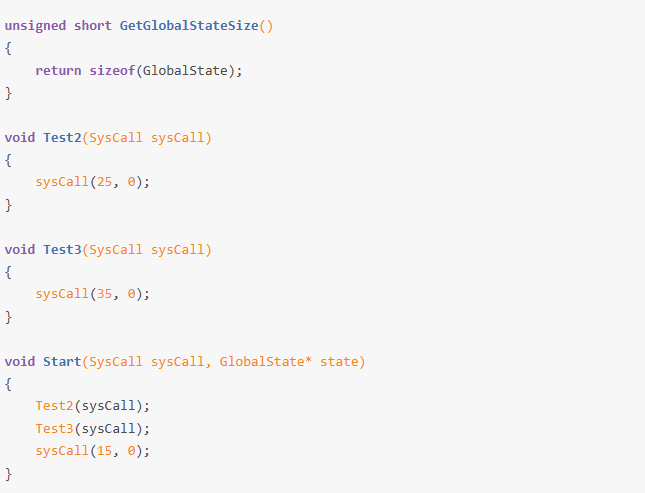
Однако в рамках данной статьи мы не будем ограничиваться лишь теорией и на практике напишем примитивную 2D-игрушку, которая будет работать сразу на трех платформах без каких-либо изменений в коде самой игры: Windows, MRP (Mythroad) и VXP. Но для того, чтобы достигнуть такого уровня абстракции от платформы, нам необходимо написать рантайм, который оборачивает все необходимые платформозависимые функции для нашей игры.
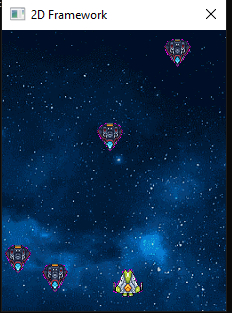
Игрушка будет простой: 2D скролл-шутер с видом сверху, а-ля Asteroids. Летаем по космосу, и стреляем по враждебным корабликам, стараясь не попасть под вражеские лазеры. Всё просто и понятно :)
❯ Практическая часть: Кроссплатформенный рантайм
Итак, что нам необходимо от абстракции для такой простой игры? Давайте посмотрим:
Графика: очистка экрана, отрисовка спрайтов с прозрачностью (без альфа-блендинга, только колоркей), отрисовка текста. При возможности, желательно использовать нативное API системы для рисования графики, а не городить собственный блиттер. Формат пикселя фиксирован: RGB565 (65к цветов).
Ресурсы: хранятся в одном образе с основной игрой. Фактически, все ресурсы упакованы в виде обычных массивов байт в заголовочных файлах. Я пользуюсь вот этой тулзой для конвертации спрайтов в массивы байтов.
Звук: воспроизведение хотя-бы одного WAV-потока. Почему одного? Потому что далеко не на всех платформах есть доступ к аппаратному микшеру… да и вообще не везде есть прямой доступ к PCM (привет MRP), иногда разработчики ограничиваются лишь одним каналом для WAV-звука без возможности воспроизведения нескольких аудиофайлов одновременно.
Ввод: абстракция от клавиатуры классического моноблока: стрелки, OK, левый и правые софткеи.
Стандартная библиотека: не на всех платформах можно вызывать функции напрямую из stdlib. Как минимум в MRP и, например, «эльфах» для Motorola, нет возможности вызывать аллокатор, rand и некоторые другие функции из обычных заголовочников стандартной библиотеки. На таких платформах, системные инклуды дефайнами подменяют стандартные функции на своих реализации:
#define malloc system_alloc
#define free system_free
Но если у нас игра кроссплатформенная, то и платформозависимые инклуды мы использовать не будем.
Выглядит всё достаточно просто, верно? Примерно такого набора функций хватит для нашей игры:
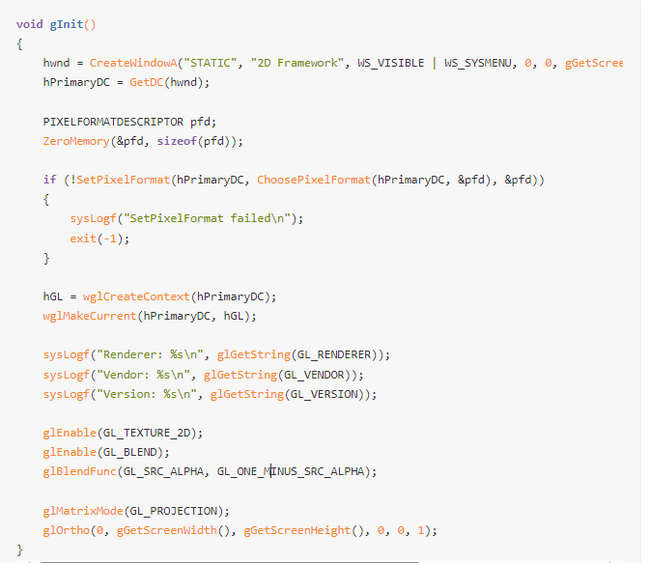
❯ Win32
Давайте же перейдем к реализации рантайма на каждой платформе по отдельности. Начнём с Win32, поскольку адекватно отлаживать игру можно только на ПК.
На десктопе у нас будет фиксированное окно 240x320, в качестве GAPI будет использоваться аппаратно-ускоренный OpenGL, а для обработки ввода будет использоваться классически GetAsyncKeyState. Реализация точки входа, создания окна и инициализации контекста GL и главного цикла приложения у нас такая:
Реализация отрисовки спрайтов очень примитивная — OGL 1.0, полностью FFP, вся отрисовка — это 2 треугольника, формирующие квад. Спрайт заливается при первом использовании в текстуру, последующие кадры реюзается уже готовая текстура. Фактическая реализация всего рендерера — т. е. функций для рисования «просто картинок», без поддержки атласов, блендинга цветов (З.Ы - длинные листинги будут на пастбине, на Пикабу нет нормального тега для кода):
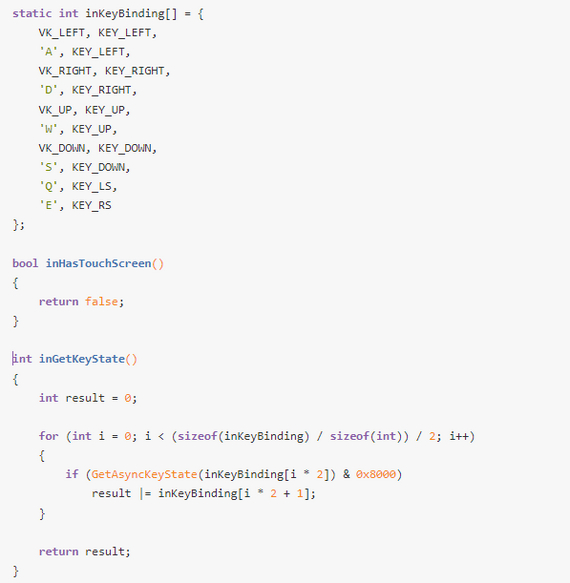
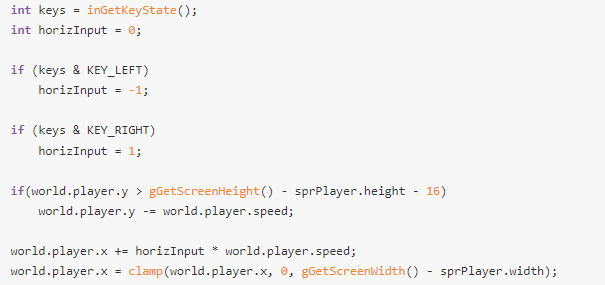
С вводом тоже всё просто. Есть биндинг кнопок клавиатуры к кнопкам на кейпаде телефона. inGetKeyState предполагается вызывать один раз за кадр, поэтому функция опрашивает ОС о состоянии нажатых кнопок на клавиатуре и назначает состояние виртуальных кнопок относительно состояния физических кнопок на клавиатуре.
Результат:
❯ MiniJ
Переходим к реализации рантайма для первой китайской платформы — MRP. Обратите внимание — я использую нативное API платформы для рисования спрайтов. Связано это с тем, что софтварный блиттер работает невероятно медленно даже с прямым доступом к скринбуферу устройства, а в чипсете предусмотрена отдельная графическая подсистема с командбуфером для быстрой отрисовки примитивов и графики:
SDK для MRE можно найти здесь (SKYSDK.zip): оно уже пропатчено от необходимости покупки лицензии. MRP не развивается более 10 лет, поэтому, думаю, его можно считать Abandonware. Компилятор находится в compiler/mrpbuilder.NET1.exe. За китайские SDK в публичном доступе нужно поблагодарить пользователя 4pda AjlekcaHgp MejlbHukoB, который раздобыл их на всяких csdn и выложил в свободный доступ :)
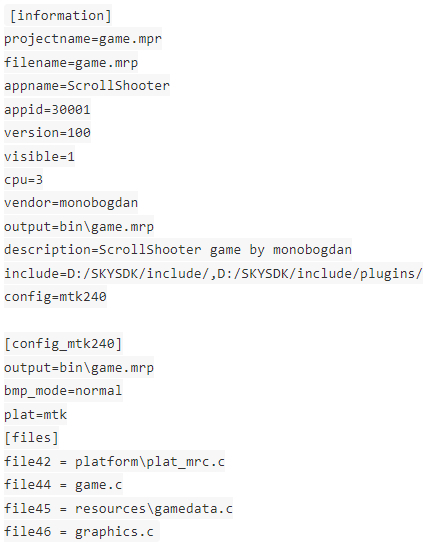
У MRP собственная система сборки, основанная на конфигурациях. Поскольку MRP может работать на устройствах с разными платформами и размерами дисплеев, под каждую можно настроить свой конфиг, который пережмет ресурсы в нужный формат. Дабы ничего не ломать, я заюзал абсолютные пути:
Компиляция приложения:
mrpbuilder.net1.exe game.mpr
Начинаем с функций обработки событий и инициализации, которые вызывает рантайм при старте приложения: mrc_init вызывается при старте приложения, а mrc_event при возникновении события. Вся инициализация очень простая: создаём таймер для обновления и перерисовки состояния игры и вызываем инициализацию игры:
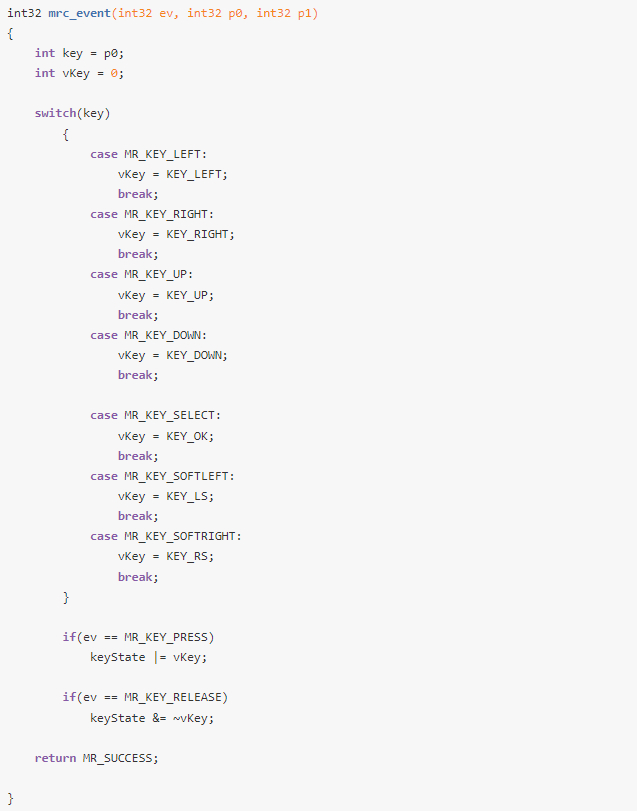
С вводом тоже никаких проблем нет, нажатия кнопок прилетают как события в mrc_event. Переводим кейкоды MRE в наши кейкоды и сохраняем их состояние:
Опять же, отлаживать MRP-приложение под реальным устройством проблематично, поэтому платформозависимый код должен быть минимальным. Кроме того, обратите внимание, что некоторые функции в MRP зависят от библиотек-плагинов. Линкер слинкует вашу программу, но на реальном устройстве их вызов вывалится в SIGSEGV и софтресет устройства. Также нельзя использовать ничего из стандартной библиотеки именно в стандартных заголовочниках (т. е. stdlib.h, string.h и т. д.), часть стандартной библиотеки реализовывается MRP и дефайнится в mrc_base.h
Что интересно, защиты памяти толком нет. Если приложение падает в SIGSEGV или портит память — систему, судя по всему, ребутит Watchdog. Защиты памяти никакой, можно напрямую читать и писать в память ядра, а также писать в регистры периферии чипсета. jpegqs, покумекаем над этим? :)
Переходим к рендереру. Тут буквально две функции, gClearScreen очищает экран, а gDrawBitmap рисует произвольный спрайт с форматом пикселя RGB565. В качестве ROP используется BM_TRANSPARENT — таким образом, mrc_bitmapShowEx будет использовать левый верхний пиксель в качестве референсного цвета для реализации прозрачности без альфа-блендинга.
voidgDrawBitmap(CBitmap* bmp, int x, int y) {
mrc_bitmapShowEx((uint16*)bmp->pixels, x, y, bmp->width, bmp->width, bmp->height, BM_TRANSPARENT, 0, 0);
}
Да, всё вот так просто. Рантайм теперь запускается на реальных китайских девайсах и работает стабильно.
❯ VXP
Теперь переходим к VXP — платформе не менее неоднозначной, чем MRP. Пожалуй, начать стоит с того, что VXP существует аж в трёх версиях: MRE 1.0, MRE 2.0 и MRE 3.0. В MRE 2.0 и выше появилась поддержка плюсов (в MRE 1.0 только Plain C) и довольно интересного GUI-фреймворка, MRE 1.0 же предлагает реализовывать гуй самому. Платформа распространена на большинстве кнопочных телефонов и смарт-часиков на чипсетах MediaTek, примерно начиная с 6235 и заканчивания 6261D. SDK можно скачать вот здесь (см MRE_SDK_3.0).
VXP сам по себе более функционален чем MRE, поскольку ориентирован исключительно на телефоны с чипсетами MediaTek. Но что самое приятное — есть доступ к уарту без каких либо костылей! То есть, если сделать GPIO-мост на условной ESP32, то мы можем получить готовый мощный МК с клавиатурой, кнопками, дисплеем, звуком и т. д. Звучит не хило, да? Кроме того, у нас есть доступ и к BT, и к GPRS, и к SMS без каких либо ограничений.
Однако в бочке мёда нашлась и ложка дёгтя: для компиляции MRE-приложений необходимо накатывать и крякать довольно старый компилятор ADS, который сам по себе поддерживает только C89 (например, нет возможности объявить переменную в объявлении цикла или середине функции, только в начале, как в Pascal). ADS уже вроде как Abandonware, так что это вроде не наказуемо… но всё равно неприятно.
Кроме того, на некоторых девайсах (в основном, фирменных Nokia а-ля 225), прошивка требует подписи у всех бинарников, либо если бинарник отладочный, то должна быть привязка к конкретному IMSI.
К тому же, каждая программа должна фиксированно указывать в заголовке, сколько Heap-памяти ей необходимо выделить. Оптимальный вариант — ~500Кб, тогда приложение запустится вообще на всех MRE-телефонах.
Зато у VXP есть адекватный симулятор под Windows. Но зачем он нам, если у нас порт игры под Win32 есть? :)
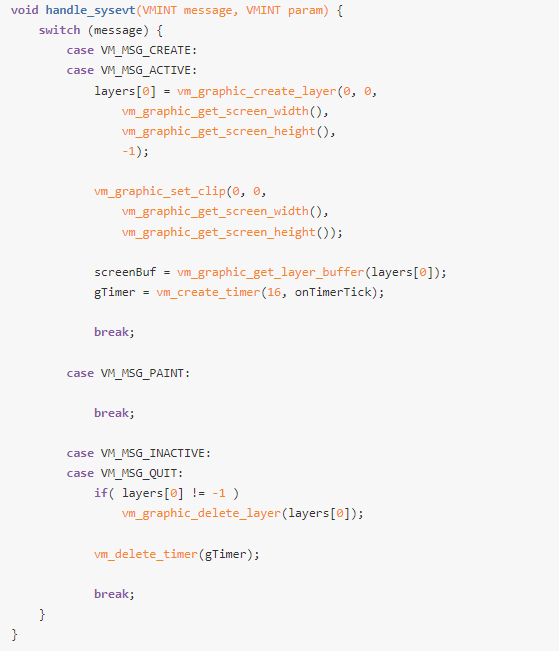
Начинаем с инициализации приложения. В процессе вызова точки входа, приложение должно назначить обработчики системных событий, коих бывает несколько. Для обработки ввода и базовых событий хватает всего три: sysevt (события окна), keyboard (физическая клавиатура. Есть полная поддержка QWERTY-клавиатур), pen (тачскрин).
Переходим к обработчику системных событий. Обратите внимание, что MRE-приложения могут работать в фоне, из-за чего необходимо ответственно подходить к созданию и освобождению объектов. Что важно усвоить с самого начала — в MRE нет понятия процессов и защиты памяти, как на ПК и полноценных смартфонах. Любая программа может попортить память или стек ОС, более того, программа использует аллокатор остальной системы, поэтому если ваша программа не «убирает» после себя, данные останутся в памяти со временем приведут к зависанию. Впрочем, WatchDog делает свою работу быстро и приводит телефон в чувство (софтресетом) за 1-2 секунды. Но как и в случае с MRE, есть приятный бонус: прямой доступ к регистрам чипсета :)
Переходим к обработке событий с кнопок. Тут всё абсолютно также, как и на MRE, лишь имена дейфанов поменялись :)
И наконец-то, к графике! Пожалуй, стоит сразу отметить, что более 20-30 FPS на большинстве устройств вы не получите даже с прямым доступом к фреймбуферу. Похоже, это связано с тем, что в MRE довольно замороченная графическая подсистема с поддержкой альфа-канала (только фиксированного во время вызова функции отрисовки картинки/примитивов, сам пиксельформат всегда RGB565) и нескольких слоев. Кроме того, похоже есть ограничения со стороны контроллера дисплея.
Изначально, MRE предполагает то, что все картинки в программе хранятся в формате… GIF. Да, весьма необычный выбор. Однако для работы с пользовательской графикой, есть возможность блиттить произвольные картинки напрямую из RAM. Вот только один нюанс — посмотрите внимательно не объявление следующей функции:
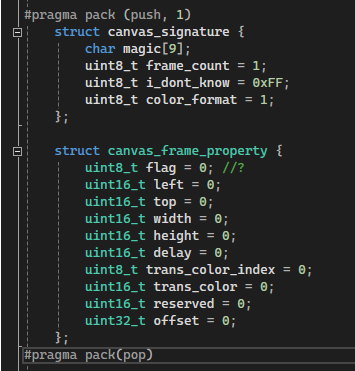
dst_disp_buf — это целевой RGB565-буфер. Логично предположить, что и src_disp_buf — тоже обычный RGB565-буфер! Но как бы не так. Документация крайне скудная, пришлось посидеть и покумекать, откуда в обычном 565 буфере возьмется индекс кадра. С подсказкой пришёл пользователь 4pda Ximik_Boda — он скинул структуру-заголовок, которая идёт перед началом каждого кадра. В документации об этом не сказано ровным счетом ничего!
Сначала я реализовал софтовый блиттинг, но он безбожно лагал. Мне стало интересно, почему нативный blt быстрее и… вопросы отпали после того, как я поглядел в ДШ чипсета: тут есть аппаратный блиттинг. И даже с ним девайс не может выдать более 20FPS!
Для реализации более-менее шустрого вывода графики, необходимо сначала создать канвас (фактически, Bitmap в MRE), создать и привязать к нему layer, получить указатель на буфер слоя и только потом скопировать туда нашу картинку. Да, вот так вот замороченно:
И только после этого всё заработало достаточно шустро :) В остальном же платформа довольно неплохая. Да, без болячек не обошлось, но всё же перспективы вполне себе есть.
На данный момент, этого достаточно для нашей игры.
❯ Пишем геймплей
Рантайм у нас есть, а значит, можно начинать писать игрушку. Хоть пишем мы на Plain-C, я всё равно из проекта в проект использую +- одну и ту же архитектуру относительно системы сущностей, стейтов и т. п. Поэтому центральным объектом у нас станет CWorld, который хранит в себе на пулы с указателями на другие объектами в сцене, а также игрока и его состояние:
Система стейтов простая и понятная — фактически, между состояниями передавать ничего не нужно. При нажатии в главном меню на «старт», нам просто необходимо проинициализировать мир заново и начать геймплей, при смерти игрока — закинуть его обратно в состояние меню. Стейты представляют из себя три указателя на функции: переход (инициализация), обновление и отрисовка.
typedefvoid(CGameStateCallback)();
Поскольку мы хотим некоторой гибкости при создании новых классов противников, то вводим структуру CEnemyClass, которая описывает визуальную составляющую врагов и их флаги — могут ли они стрелять по игроку или просто летят вниз (астероиды), как они передвигаются (зигзагами например) и т. п.
Всё! Для текущего уровня реализации игры этого достаточно :) Переходим к реализации игровой логики. Вообще, динамический аллокатор в играх для китайских платформ лучше использовать как можно меньше. Heap'а довольно мало (~600Кб), да и не совсем понятно, как этот аллокатор реализован, есть вероятность, что используется аллокатор и куча основной ОС.
Начинаем с реализации полёта кораблика. Для этого он должен реагировать на стрелки и не улетать за границы экрана, а ещё для красоты он должен «вылетать» из нижней границы экрана при старте игры:
Переходим к динамическим пулам с объектами. Как вы уже заметили, их всего два — враги и летящие снаряды. Реализация спавна врагов/снарядов простая и понятная: мы обходим каждый элемент пула, если указатель на объект не-нулевой, значит объект всё ещё жив и используется на сцене. Если нулевой — значит ячейка свободна и можно заспавнить новый объект:
При обходе пула во время обновления кадра, мы обновляем состояние каждого объекта и если его функция Think вернула true, значит объект больше не нужен и его нужно удалить:
if (enemyThink(world.enemyPool[i]))
{
sysFree(world.enemyPool[i]);
world.enemyPool[i] = 0;
}
А вот и реализация Think:
boolenemyThink(CEnemy* enemy) {
enemy->y += enemy->_class->speed;
if (enemy->y > gGetScreenHeight() || enemy->health <= 0) return true;
return false;
}
Но кораблики должны же откуда-то появляться! Для этого у нас есть переменная nextSpawn, которая позволяет реализовать самый простой тип спавнера — относительно времени (или в нашем случае тиков):
world.nextSpawn--;
if (world.nextSpawn < 0) {
CEnemy* enemy = spawnEnemy(&enemyClasses[0]);
world.nextSpawn = randRange(40, 70);
}
Результат: мы уже можем полетать, пострелять и поуворачиваться от вражеских корабликов!
Уже что-то напоминающее игру! Осталось лишь добавить подсчет очков, менюшку, разные виды противников, возможно какие-то бонусы и у нас будет готовая простенькая аркада. В целом, выше приведена достаточно неплохая архитектура для простых 2D-игр на Plain C. Фактически, она может быть хорошей базой и для ваших игр: в теме о китах на 4pda я встречал немало людей, которые банально не знали, с чего начать.
❯ Что у нас получилось?
Но без тестов на реальных устройствах материал не был бы таким интересным! Поэтому давайте протестируем игру на двух реальных телефонах, как вы уже догадались, один — Nokla TV E71, а второй — клон Nokia 6700, который подарил мне мой читатель Никита.
На TV E71 игра идёт не сказать что очень бодро. Кадров 15 точно есть, что, учитывая разрешение 240x320, весьма неплохо для такого девайса.
а 6700,, даже учитывая более низкое разрешение — 176x220, дела примерно также — ~15FPS! Но поиграть всё равно можно. Уже хотите написать «автор наговнокодил, а теперь ноет из-за низкого FPS»? Ан-нет, я попробовал игры сторонних разработчиков — они идут примерно также :( К сожалению, таковы аппаратные ограничения устройства.
Исходный код игры с Makefile'ами и файлами проектов для Visual Studio и MRELauncher доступны на моём GitHub. Свободно изучайте и используйте его в любых целях :)
❯ Заключение
Но в остальном же, демка получилась довольно прикольной, как и сам опыт программирования для китайских телефонов. В общем и целом, китайцы пытались максимально упростить API и привлечь разработчиков к своей платформе. Если ради примера взглянуть на API для Elf'ов на Motorola, можно ужаснуться от state-based архитектуры платформы P2K. А тут тебе init, event, draw — и всё!
Но популярности помешала непонятная закрытость платформы, костыльный запуск программ, отсутствие нормального симулятора. А ведь сколько фишек было: даже возможность писать и читать память ядра! А вы как считаете? Можно ли вдохнуть в китайские кнопочники новую жизнь, узнав о наличии возможности запуска нативного кода на них?
P. S.: Друзья! Время от времени я пишу пост о поиске различных китайских девайсов (подделок, реплик, закосов на айфоны, самсунги, сони, HTC и т. п.) для будущих статей. Однако очень часто читатели пишут «где ж ты был месяц назад, мешок таких выбросил!», поэтому я решил в заключение каждой статьи вставлять объявление о поиске девайсов для контента. Есть желание что-то выкинуть или отправить в чермет? Даже нерабочую «невключайку» или полурабочую? А может, у этих девайсов есть шанс на более интересное существование! Смотрите в соответствующем посте, что я делаю с китайскими подделками на айфоны, самсунги, макбуки и айпады! Да и чего уж там говорить: эта статья уже сама по себе весьма наглядный пример! Найти меня можно в комментариях тут, на Пикабу, и в тг @monobogdan
Понравился материал? У меня есть канал в Телеге, куда я публикую бэкстейдж со статей, всякие мысли и советы касательно ремонта и программирования под различные девайсы, а также вовремя публикую ссылки на свои новые статьи. 1-2 поста в день, никакого мусора!
Полезный материал?
Были ли у вас такие китайчики?
Материал подготовлен при поддержке TimeWeb Cloud. Подписывайтесь на меня и @Timeweb.Cloud, дабы не пропускать новые статьи каждую неделю!
Зачастую в процессе разработки собственных устройств или моддинга уже существующих, встаёт задача выполнения стороннего кода: будь то ваши собственные программы с SD-флэшек, или программы, написанные другими пользователями с помощью SDK для вашего устройства. Тема компиляторов и кодогенерации достаточно сложная: чтобы просто загрузить ELF или EXE (PE) программу, вам нужно досконально разбираться в особенностях вашей архитектуры: что такое ABI, релокации, GOT, отличие -fPIE от -fPIC, как писать скрипты для ld и т. п. Недавно я копал SDK для первых версий Symbian и основываясь на решениях из этой ОС понял, каким образом можно сделать крайне «дешевую» загрузку любого нативного кода практически на любом микроконтроллере, совершенно не вникая в особенности кодогенерации под неё! Сегодня мы с вами: узнаем, что происходит в процессе загрузки программы ядром Linux, рассмотрим концепцию, предложенную Symbian Foundation и реализуем её на практике для относительно малоизвестной архитектуры — XTensa (хотя она используется в ESP32, детали её реализации «под капотом» для многих остаются загадкой). Интересно? Тогда добро пожаловать под кат!
❯ Как это работает?
Думаю, для многих моих читателей реализация процесса загрузки exe-программ и dll-библиотек в память процесса оставалась эдаким чёрным ящиком, в детали реализации которого вдаваться не нужно. Отчасти это так и есть: современные ОС разруливают процесс загрузки бинарников в память сами, не требуя от программиста вообще ничего, даже понимания того, куда будет загружена его библиотека или программа.
Давайте для общего понимания вкратце разберемся, как происходит загрузка программ в Windows/Linux:
1. Система создаёт процесс и загружает в память программы секции из ELF/PE. Обычные программы для своей работы используют 3 секции: .text (код), .data (не-инициализированный сегмент памяти для глобальных переменных), .bss (сегмент памяти для инициализированных переменных). Каждому процессу выделяется собственное адресное пространство, называемое виртуальной памятью, которое не позволяет программе испортить память ядра, а также позволяет не зависеть от разметки физической памяти на выполняющей машине. Концепцию виртуальной памяти реализует специальной модуль в процессоре, называемый MMU.
2. Если бы наши программы не использовали никаких зависимостей в виде динамических библиотек, то на этом процесс загрузки можно было бы закончить: каждая программа имеет свой адрес загрузки, относительно которого линкер строит связи между обращениями к коду/данным программы. Фактически, для самых простых программ линкеру остаётся лишь прибавить адрес загрузки программы (например, 0x100) к каждому абсолютному обращению к памяти. Однако современные программы используют десятки библиотек и для всех предусмотреть собственный адрес загрузки не получится: кто-то где-то всё равно будет пересекаться и вероятно, портить память. Кроме того, современные стандарты безопасности в Linux рекомендуют использовать позиционно-независимый код, дабы использовать преимущества ASLR (Address Space Layout Randomization, или простыми словами возможность загрузить программу в случайное место в памяти, дабы некоторые уязвимости, завязанные на фиксированном адресе загрузки программы перестали работать).
3. Поэтому для решения этой проблемы придуман т. н. динамический линкер, который уже на этапе загрузки программы или библиотеки патчит программу так, чтобы её можно было загрузить в любой участок памяти. Для этого используются данные, полученные от обычного линкера а этапе компиляции программы: помимо .text, .data и .bss, линкер создаёт секции .rel и .rel-plt, которые называются релокациями. Если объяснять совсем условно, то релокации — это просто запись вида «какой абсолютный адрес в коде программы нужно пропатчить» -> «на какое смещение его пропатчить». Самая простая релокация выглядит вот так:
Где по итогу:
.rel-plt же служит для резолвинга вызовов к dll/so: изначально программа ссылается на заранее определенные в процессе компиляции символы, которые уже в процессе загрузки патчатся на физические адреса функций из загруженной библиотеки.
И казалось бы — всё очень просто, пока в дело не вступают GOT (Global Offset Table — глобальная таблица смещений) и особенности реализации конкретного ABI. И ладно бы x86 или ARM, там всё разжевано и понятно, однако на других архитектурах начинаются проблемы и не всегда очевидно что и где за что отвечает.
А ведь чаще всего нужно просто загрузить небольшую программу, которой не нужны комплексные загрузчики: немного кода, немного данных и всё. И тут у нас есть три выхода:
Писать полноценный загрузчик ELF-бинарников. ELF может оказаться громоздким для некоторых окружений и его реализация может оказаться тривиальной не для всех.
Зарезервировать определенный сегмент в памяти (пусть с 0xFFF по 0xFFFF) и скомпилировать нашу программу с адресом загрузки 0xFFF с параметром -fno-pic. В таком случае, линкер сгенерирует обращения к памяти по абсолютным адресам — если переменная лежит по адресу 0xFFF, то программа будет обращаться сразу к этому адресу памяти, без необходимости что либо динамически линковать. Именно такой подход использовался во времена ZX Spectrum, Commodore 64 и MS-DOS (однако там роль «виртуальной памяти» выполняла такая особенность 8086, как сегменты). У такого подхода есть и минусы: относительная невозможность загрузки сразу нескольких программ одновременно, зарезервированное пространство линейно отъест небольшой кусок памяти у основной прошивки, нет возможности динамической аллокации секций. Зато такой код теоретически будет работать быстрее, чем PIC.
Проблемы реализации такого способа: иногда нужно лезть в систему сборки основной прошивки и патчить скрипт линкера так, чтобы он не трогал определенный регион памяти. В случае esp32, например, это требует патча в сам SDK и возможного «откола» от мейнлайн дистрибутива.
Использовать программу с относительной адресацией, однако без сегментов .bss и .data. Самый простой в реализации способ, который к тому же очень экономичен к памяти, позволяет загружать программу в любое место и пользоваться всеми фишками динамического аллокатора и не требует вмешательств в основную прошивку, кроме примитивного загрузчика программ. Именно его я и предлагаю рассмотреть подробнее.
Недавно мы сидели в чате ELF-сцены (разработка нативных программ под телефоны Siemens, Sony Ericsson, Motorola и LG с помощью хаков) и думали, как же можно реализовать загрузчик сторонних программ на практически неизвестных платформах. Кто-то предлагал взять ELF под основу — однако с его реализацией под некоторые платформы есть трудности, а кто-то предлагал писать «бинлоадер» — самопальный формат бинарников, который получается из, например, тех же эльфов.
В это же время я копал SDK для Symbian и хорошо помнил, что в прикладных приложениях для этой ОС нет поддержки глобальных переменных вообще. Да, сегмент .data и .bss полностью отсутствует — переменные предлагается хранить в структурах. Почему так сделано? Всё дело в том, что каждая программа в Symbian — это dll-библиотека, которую загружает EKA и создаёт экземпляр CApaApplication. И дабы была возможность загрузить dll один раз для всех программ (что справедливо для системных библиотек), ребята полностью выкинули возможность использования любых глобальных переменных. А ведь идея интересная!
Однако в таком подходе есть несколько серьезных ограничений:
Отсутствие глобальных переменных может стать проблемой при портированиии уже существующего софта, хотя вашим программам ничего не мешает передавать в каждую функцию структуру с глобальным стейтом, который можно при необходимости изменять. Кроме того, нет ограничений на использование C++ (за исключением необходимости ручной реализации new/delete и отсутствием исключений).
Отсутствие преинициализированных данных. Вот это уже может стать относительно серьёзной проблемой, у которой, тем не менее, есть свои обходные решения. Например если вы храните команды для инициализации дисплея в таблице, или какие-либо калибровочные данные — вы не сможете их объявить, просто используя инициализаторы в C. Тоже самое касается и строковых литерал. Тут есть два варианта: часть таблиц можно вынести на стек (если эти самые таблицы достаточно маленькие), либо подгружать необходимые данные из бинарника с помощью основной прошивки (например, LoadString и т. п.).
Давайте же на практике посмотрим, имеет ли право на жизнь такой подход!
❯ Практическая реализация
Формат нашего бинарника будет до безобразия прост: небольшой заголовок в начале файла и просто сырой дамп сегмента .text, который можно экспортировать из полученного elf даже без необходимости писать скрипт для линкера. При этом нужно учесть, что ESP32 — это микроконтроллер частично Гарвардской архитектуры, т. е. шина данных и кода у него расположены отдельно. Однако у чипа есть полноценный MMU, который позволяет маппить регионы физической памяти в виртуальную память, чем мы и воспользуемся в итоге!
Заголовок нашего бинарника будет выглядеть вот так:
Программа общается с основной прошивкой посредством псевдо-syscall'ов: функции, которая в качестве первого аргумента ожидает номер нужной службы и один 32х-битный указатель для описания структуры с параметрами. Реализация syscall'ов — одна из самых простых и неприхотливых с точки зрения обратной совместимости с будущими прошивками.
Концептуально всё очень просто: GetGlobalStateSize сообщает нашему загрузчику размер структуры для хранения глобального стейта, в то время как Start уже фактически заменяет main() в нашей программе. Необходимости в crt0 нет, поскольку весь необходимый инит выполняет бутлоадер ESP32. Впрочем, при желании вы можете выделить отдельный стек для вашей программы — это повысит надежность, если выполняемая программа удумает испортить стек.
-fno-pic отключает генерацию кода, зависимого от GOT, -nostdlib и -nostartfiles убирает из билда crt0 и stdlib, благодаря чему мы получаем только необходимый код. --section-start задает смещение для загрузки секции .text на 0x0 (в идеале это делать необходимо из скрипта для ld). objcopy скопирует из полученного ELF только необходимую нам секцию .text.
Как же это работает на практике? Давайте дизассемблируем выходной бинарник и посмотрим, что у нас дает на выхлопе cc:
Обратите внимание, что Start вызывает подфункции с помощью инструкции CALLX8, которая в отличии от обычного Immediate-версии CALL8, выполняет переход относительно текущего адреса в PC, благодаря чему переход полностью независим от адреса загрузки программы в памяти. А благодаря тому, что все данные, в том числе и указатель на глобальный стейт передаются через стек, нет необходимости релокейтить сегменты данных.
По итогу всё, что нужно от загрузчика бинарников — это загрузить программу в память для инструкций, выделить память для структуры с стейтом программы и передать управление Start. Всё! Конкретно в случае ESP32, у нас есть два возможных решения задачи загрузки программы в память:
Загрузить программу в IRAM. Такая возможность теоретически есть, однако на практике загрузчик ESP32 устанавливает права только на чтение и выполнение на данный регион памяти. Попытка что-то скопировать туда закончится исключением SIGSEGV. Кроме того, сегмент IRAM относительно небольшой — всего около 200Кб.
Самопрограммирование. Для этого, в esp32 есть два механизма — Partition API и SPI Flash API. Я выбрал Partition API для простоты реализации.
Для нашей прошивки необходимо будет переразметить флэш-память. Для этого запускаем idf.py menuconfig, идём в Partition Table -> Custom partition table CSV. Создаём в папке проекта partitions.csv, куда пишем:
Как видите, ничего сложного в выполнении сторонних программ при условии соблюдении некоторых ограничений нет. Да, в таком подходе есть как серьезные плюсы, так и минусы, однако он делает своё дело и позволяет реализовать запуск игр на кастомных игровых консолях, или сторонних программ на самодельных компьютерах. Ну и конечно же не стоит забывать про плагины! Авось в вашем решении нужна возможность расширения функционала устройства, однако предоставлять исходный код или даже объектные файлы нет возможности — тогда вам может пригодится и такая методика.
Пожалуй, стоит упомянуть ещё один… очень своеобразный метод, который я иногда встречаю при реализации самодельных компьютеров. Люди пишут… эмуляторы 6502/Z80 :) И если такой подход ещё +- применим к ESP32, то в AVR просадки производительности будут слишком серьезными. Так зачем, если можно использовать все возможности ядра на максимум?
Полезный материал?
Приходилось ли загружать сторонний код в ваших устройствах?