Я вот тоже недавно себе купил 3d-принтер (3-й по счёту) и теперь могу делать всякие интересные штуки для электрогитары и оформлять их в прикольные корпуса:
1/3
Фуззы в разных расцветках
Благодаря 3d-принтеру освоил и 3d-моделирование. Сначала шло тяжело, но потом освоился и начал получать удовольствие. Странные и интересные ощущения когда что-то нарисовал и вот оно материализовалось! Ну и с компоновкой стало сильно проще, так как делаешь уже корпус под изделие, а не изделие под корпус.
Кровь, кишки, распидорасило (18+)
Но некоторые корпуса проектирую в стандартных размерах, чтобы потом легко было перейти на металл:
Решил поиграть с дизайном, но пока проигрываю - не дизайнер я по профессии :)
А вот ещё нестандартный корпус - собирал в подарок учителю музыки и себе заодно копию Sovtek Big Muff Green Russian. Задача была повторить максимально точно: те самые компоненты насколько это возможно и та самая трассировка платы. Поэтому корпус получился большим:
1/2
Воскрешение легенды!
Вот такие интересные коробочки получаются, но в начале изделия были значительно проще.
Ниже одна из моих первых работ - магнитометр и корпус для него. Умеет измерять насколько сильно магнит магнитит (в попугаях) :
Не очень точный, но полезный прибор. Позволяет оценить качество партии магнитов на предмет разброса характеристик.
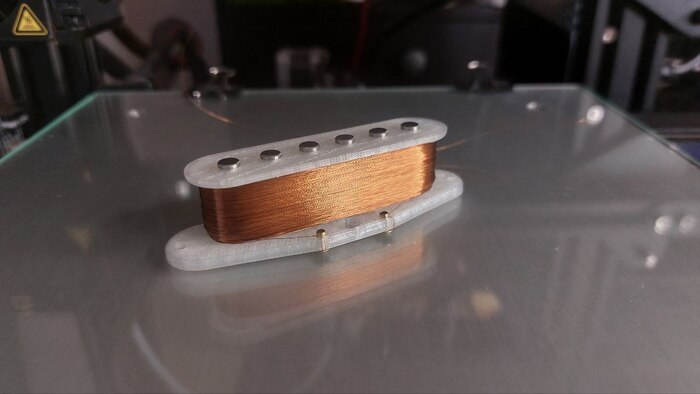
А вот пустая катушка звукоснимателя, куда я вставил магниты с примерно одинаковыми характеристиками после измерения предыдущим прибором :)
Осталось намотать проволоку и сварить в парафине.
Ну и чтобы мотать звукосниматели, нужен намоточный станок, верно? Так вот же он:
Тут уже не только 3д печать, но и столярное искусство в виде отпиленного куска фанеры!
Станок не очень удачный, буду переделывать, благо уже некоторый опыт имеется и знаю что надо исправить. Однако несколько звукоснимателей на нём сделал :)
Вот как-то так! Всякие другие штуки и игрушки тоже печатаю периодически, но их уже много раз выкладывали, поэтому не вижу смысла постить то что и так есть на MakerWorld.
Желаю всем успехов в инженерном творчестве и пусть 3d печать приносит вам удовольствие!
У каждого радиолюбителя со временем скапливается большое количество старых электронных компонентов, выпаянных из разных устройств. Их и выбросить жалко и в новое изделие уже не поставишь, что же с ними делать? Сегодня я расскажу как мне буквально из "электротехнического мусора" удалось собрать вполне годную гитарную педаль по мотивам знаменитого фузза Big Muff Green Russian, но конечно же с некоторыми изменениями и своим характером!
В один прекрасный вечер мне захотелось развлечься и сделать что-то необычное и музыкальное! У меня есть приличный запас старых советских компонентов, которые я с детства старательно выпаивал из плат от телевизоров, коих в сарае накопилось огромное количество (отец и дедушка занимались ремонтом). Расходовались эти запасы крайне медленно, так как по сути это электротехнический хлам, а дать им вторую жизнь очень хотелось, поэтому я решил сделать из этого добра педаль эффектов!
Детали
Мой выбор пал на схему Big Muff в вариации Green Russian от Sovtek, так как она построена изначально на советской компонентной базе и схема довольно простая. В случае чего, не сложно будет подобрать аналоги, ведь выбирать придётся только из того что есть в коробках со старыми деталями.
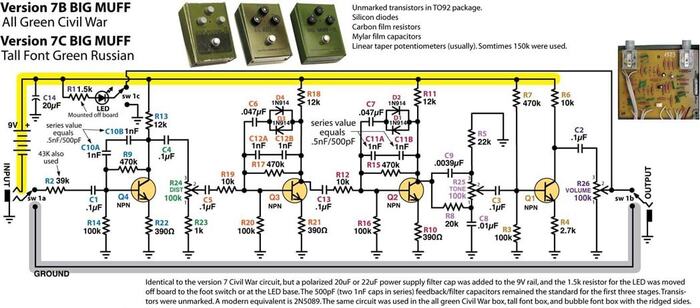
Принципиальная электрическая схема Big Muff Green Russian
Естественно из-за многочисленных отступлений получится совсем не Green Russian, но главное чтобы это сносно звучало по итогу. Основная цель - использовать в примочке максимальное количество б/у советских деталей, выпаянных из старых плат!
Вот из таких плат, покрытых слоем пыли, я выпаивал детали.
Если кто-то сталкивался с советской электроникой, то наверняка видел оранжевые и жёлтые транзисторы КТ315 разных серий. У меня их накопилось некоторое количество, поэтому решил что они станут сердцем гитарной педали. Использовать их в самодельных бигмафах идея не новая, но обычно их ставили за неимением другого. Мне же просто интересно что получится.
Кое-что из старых запасов
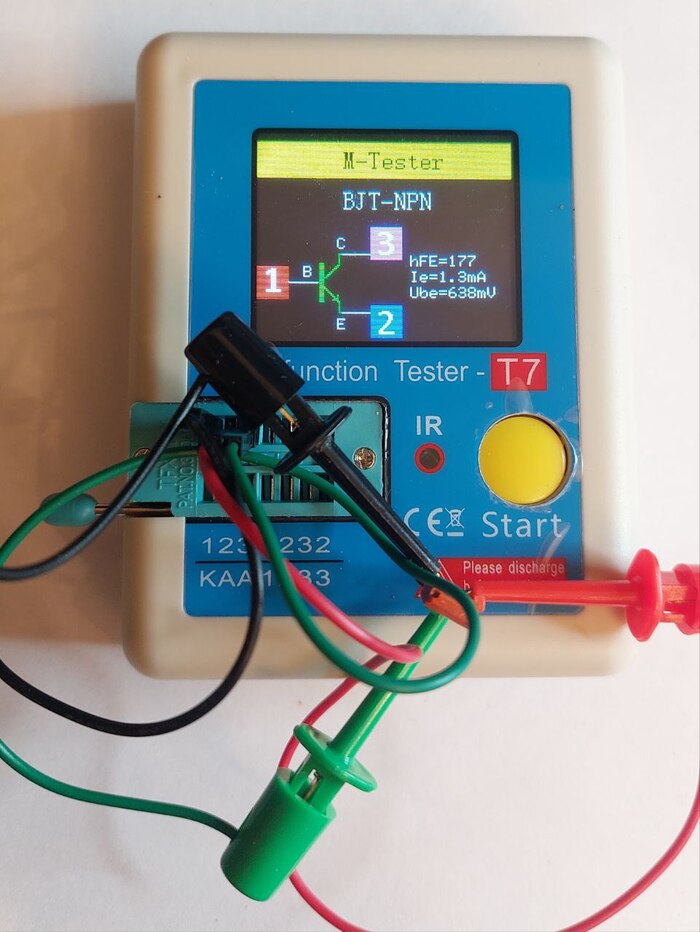
Транзисторы КТ315 пришлось отбирать из-за большого разбега характеристик и самые более-менее подходящие по hFE оказались жёлтые КТ315Г, хотя и среди оранжевых транзисторов разных серий находились неплохие экземпляры. Дело в том что в оригинальный Sovtek Big Muff Green Russian ставили КТ3102ЕМ (есть у меня и такие, но новые с хранения), а у них и так гораздо больший коэффициент усиления, чем у транзисторов КТ315, поэтому нужен тщательный отбор, чтобы полученное изделие хоть как-то зазвучало.
Транзистор с hFE = 177 попугаев
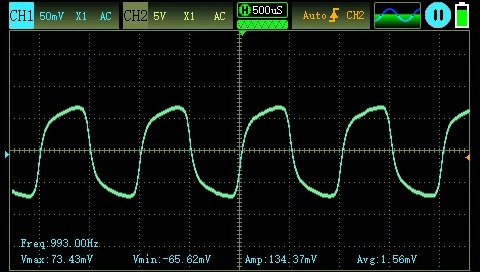
Так же крайне важную роль в формировании звука педали играют диоды (на схеме D1, D2, D3 и D4), так как они клиппируют сигнал, или, простыми словами - срезают верхушку синусоиды. Именно благодаря клиппингу электрогитара приобретает своё характерное перегруженное звучание, позволяющее исполнять композиции различных тяжёлых жанров музыки и не только. Вот как это выглядит на экране осциллографа:
Искажённый сигнал, прошедший через гитарную педаль эффектов из данной статьи
В вышеприведённой схеме видно что диоды включены встречно-параллельно в цепи обратной связи второго и третьего усилительного каскада на транзисторе. Это позволяет получить на выходе каскада мягкое ограничение сигнала (soft clipping), то есть синусоида не резко срезается, а плавно. Третий каскад повторяет операцию, создавая более жёсткое ограничение и звук становится чуть злее.
От характера ограничения сигнала (клиппинга) очень сильно зависит и конечный звук, и то что вы увидите на экране осциллографа. Разные диоды оказывают разное влияние на сигнал и их подбор это довольно интересная задача - хочется сделать максимально безумную комбинацию, которая будет при этом звучать.
Даже светодиоды иногда применяются для ограничения сигнала
Конденсаторы по возможности решил ставить плёночные, но так как выбор из старых деталей не бесконечный, то в ход пойдёт и керамика - красные керамические конденсаторы (флажки), которые максимально осквернят данную педаль. Самое смешное - такие конденсаторы можно встретить в поздних педалях Sovtek, несмотря на то что это плохая практика использовать их в аудиотракте. Ну а резисторы взял МЛТ, к ним у меня вопросов нет и их у меня много разных.
Вот такая концепция "педали из мусора" у меня получилась, при этом основная цель добиться адекватного звучания, а не просто собрать абы что из хлама.
Печатная плата
Плату под Big Muff можно легко вытравить самостоятельно (это совсем не сложно), а можно заказать и в Китае. Трассировку платы мне любезно предоставил Юрий Калошин, владелец сайта komitart.ru, ссылку прикладываю: https://www.komitart.ru/guitar/836-sobiraem-russian-big-muff.html (этот сайт настолько старый и известный в своих кругах, что в представлении вряд ли нуждается, надеюсь за рекламу не сочтут)
Я ранее уже собирал себе и друзьям копию педали Big Muff Green Russian, причём выбирал трассировку как в оригинале. Первые образцы как раз с платами, изготовленными общеизвестным методом ЛУТ:
Довольно точная копия Big Muff Green Russian
Затем я немного доработал плату под True Bypass и заказал себе две небольших партии из Китая, так что готовые платы для экспериментов у меня уже были, что сильно упрощало весь процесс.
С одной стороны в концепцию "педаль из мусора" просится не фабричная плата, но с другой стороны одна из партий плат была с браком. Дело в том, что отправляя архив, я забыл перевести названия файлов со слоями на английский язык и в результате пришла одна из партий плат в зеркальном исполнении, при этом сами платы были полностью работоспособны, но требовали дополнительных перемычек на разъёмах. В итоге решил пустить бракованные платы на эксперименты - это сильно удобнее чем травить и рассверливать с нуля.
Процесс сборки
И так, детали на руках, началось самое интересное - сборка! Первая трудность была в том что распиновка у КТ315 и КТ3102ЕМ разная, соответственно просто взять и поставить КТ315 в отверстия на плате нельзя, так как у него база с краю, а не посередине. Нужно немного нарастить выводы и выгнуть их так, чтобы каждый вывод дотянулся до своего посадочного места. Мой внутренний перфекционист начал сопротивляться такому колхозу и я решил ещё раз пересмотреть свои запасы деталей в поисках чего-то подходящего.
Под руку попались транзисторы КТ209 и я так торопился, что не сразу обратил внимание на то, что это PNP-транзисторы, а не NPN, как KT315 или KT3102ЕМ:
Тут нет ничего подходящего
Даже на радостях успел их навтыкать в плату, прежде чем понял что что-то идёт не так, поэтому пришлось их выпаивать обратно :) Зато на КТ209 можно собрать Fuzz Face с положительной землёй, как в старые добрые времена - тоже идея для проекта!
Печатная плата в процессе сборки
А так в старых запасах оказалось на удивление много подходящих деталей и плата начала быстро заполняться компонентами.
Без красных керамических конденсаторов не обошлось - смотрятся красиво, но по факту это ужас. Температурная чувствительность у них сравнима с германиевыми транзисторами, а ещё есть микрофонный эффект и ненужные шумы. Но в данном случае не страшно - это развлекательный эксперимент, а не сборка по всем канонам, тем более, как я говорил ранее, их не стеснялись ставить в бигмафы от Sovtek.
По диодам решил сделать так: первая пара диодов из кремния, вторая пара диодов - германиевые. Точно будет звучать интересно!
Так как некоторых деталей мне не хватало, я продолжил разбирать старые платы от телевизоров. В процессе демонтажа компонентов мне улыбнулась удача в виде транзистора КТ3102К (к сожалению только одна штука). По характеристикам он уступает транзистору КТ3102ЕМ (ставился в Big Muff Green Russian), но имеет неплохой коэффициент усиления (около 400), поэтому я поставил его в первый каскад.
Транзистор КТ3102К
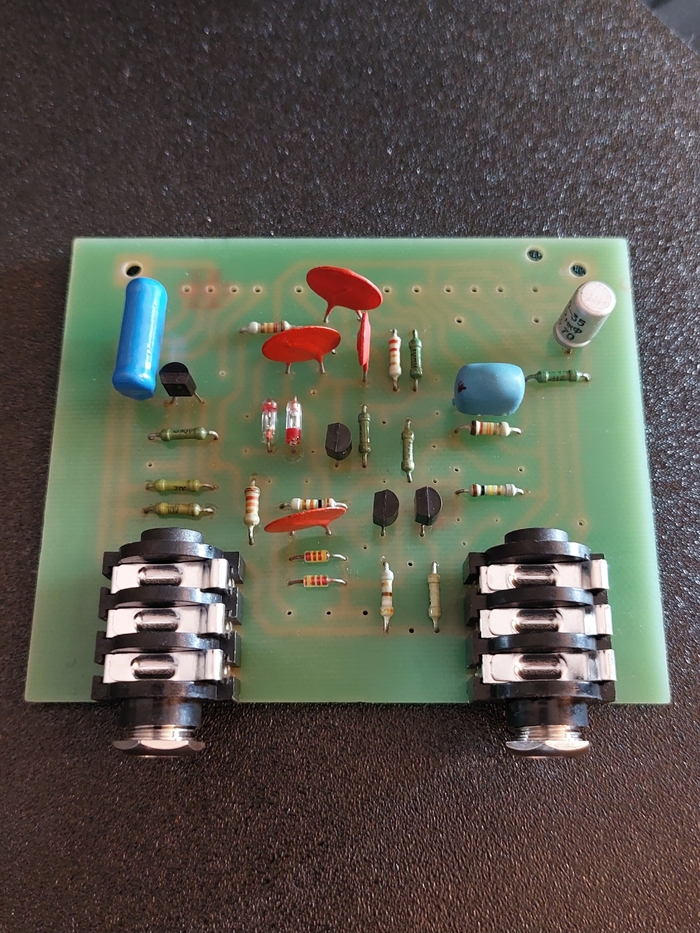
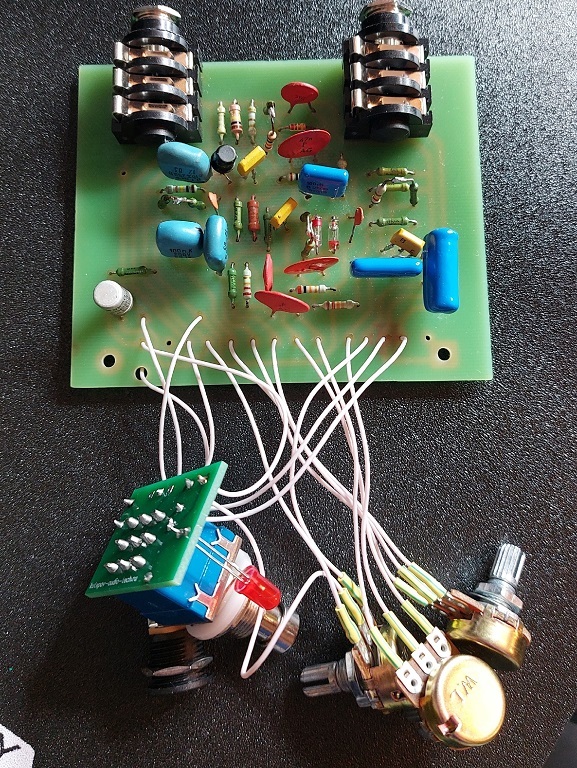
Остальные детали тоже были успешно найдены, транзисторы КТ315Г были успешно заколхожены и установлены в оставшиеся 3 каскада. Выглядит довольно ужасно:
Собранная плата педали "Big Muff из мусора"
Обратите внимание на количество проводов - сейчас так конечно стараются не делать, потому что каждый провод усложняет и удорожает сборку прибора. Чтобы немного облегчить свой труд, я поставил на кнопку специальную плату под схему True Bypass, которую предварительно спроектировал и заказал в Китае - для домашних проектов очень удобное решение!
По итогу получилось собрать педаль почти на 100% из б/у советских компонентов, которые были демонтированы со старых плат! Из нового только кнопка, разъёмы и потенциометры.
Собранная плата была успешно протестирована и выдала неплохой звук с большими возможностями регулировки низов в духе Sovtek Big Muff Green Russian, но при этом не такой агрессивный (для кого-то минус, а для кого-то плюс). Осталось оформить всё в корпус и можно разучивать песни Pink Floid на гитаре!
Корпус
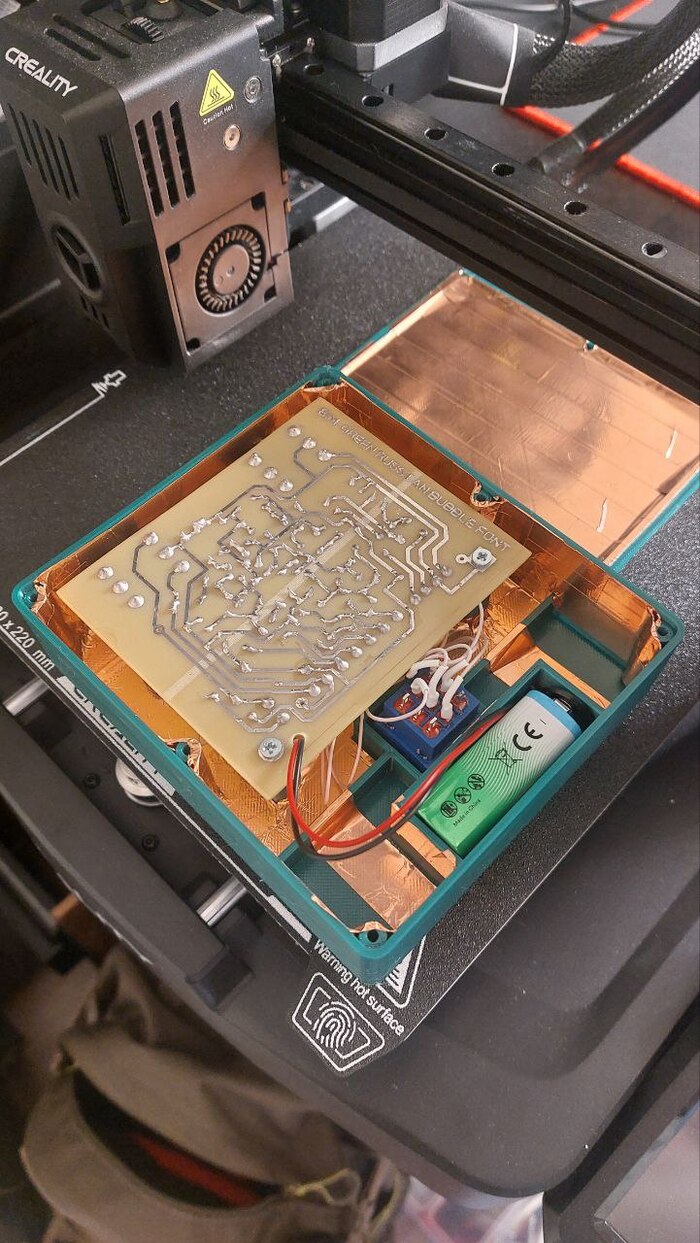
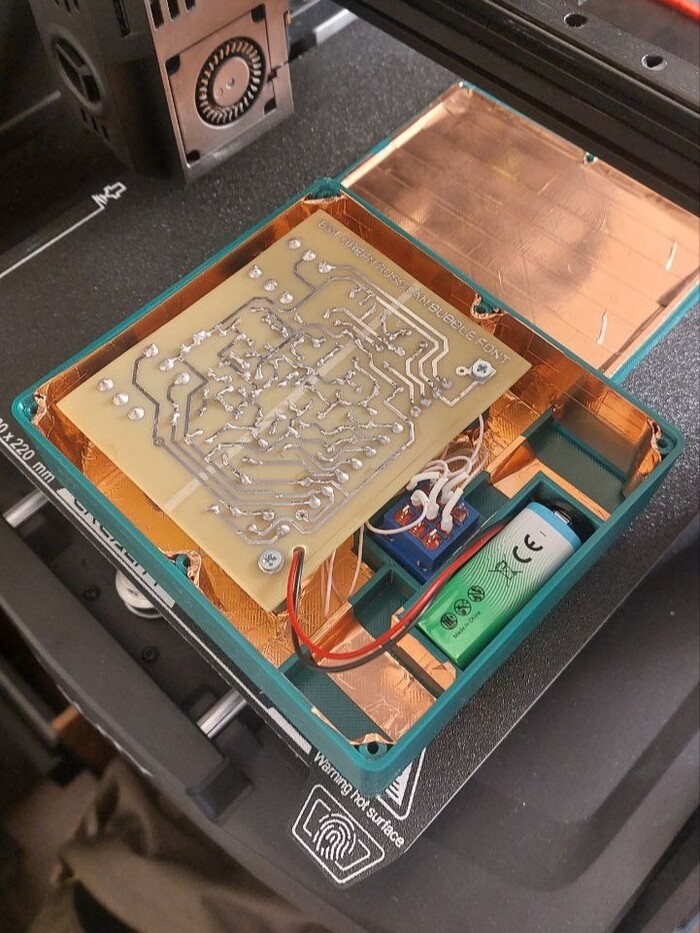
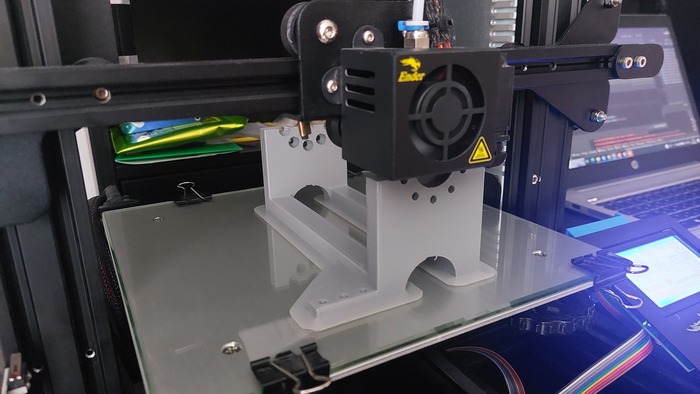
Печатная плата под оригинальный Big Muff Green Russian мягко говоря не очень компактная и требует вместительного корпуса, поэтому я решил корпус напечатать на 3d-принтере, используя биоразлагаемый PLA-пластик. Процесс печати выглядел так:
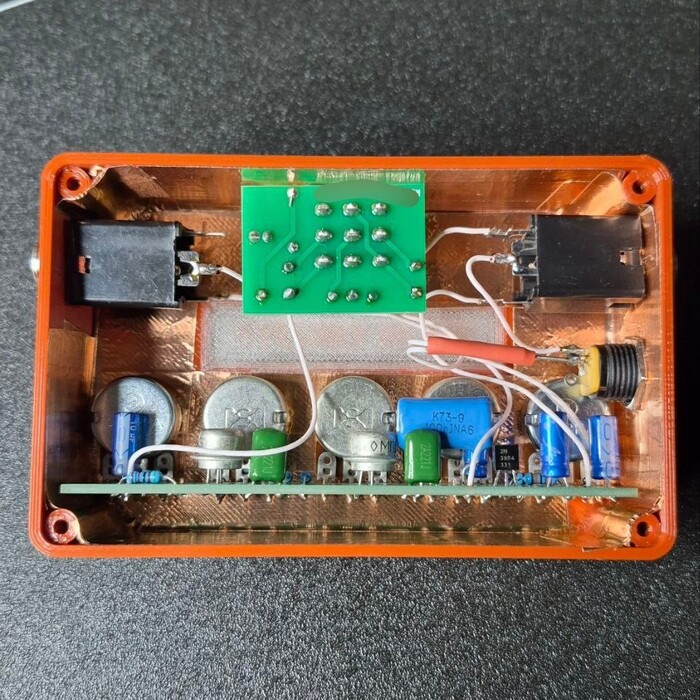
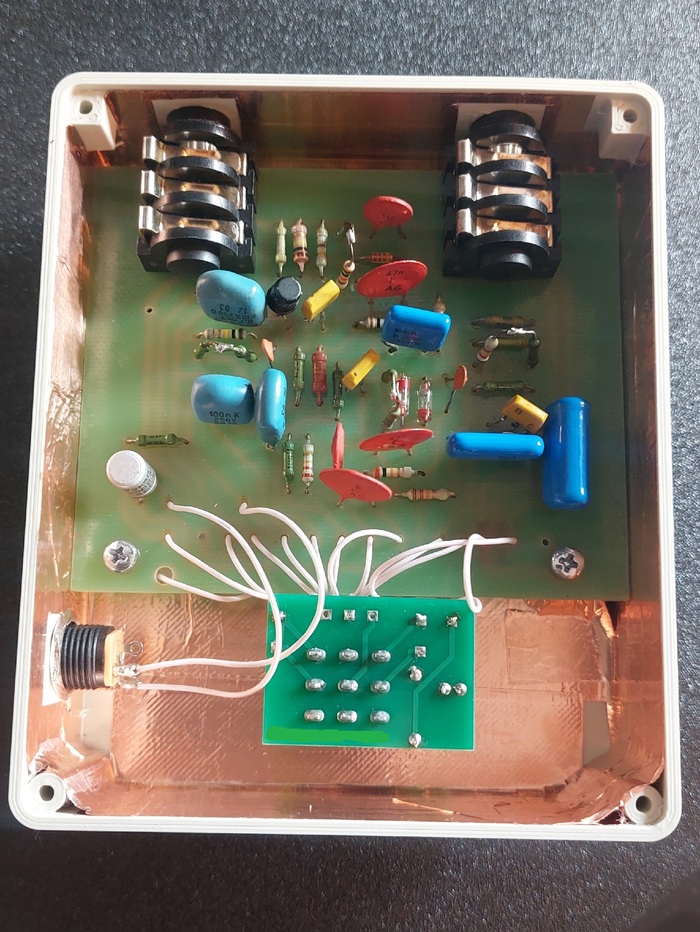
Так как корпус из пластика, то его обязательно нужно экранировать во избежание наводок и лишнего шума, что я и сделал, используя медную фольгу. Так же важно, чтобы соединение земли с фольгой было только в одной точке, чтобы избежать земляной петли и для этой цели на плате есть специальный контакт в месте крепления винта, а остальное всё изолировано. Вот так выглядит плата, собранная в корпус:
Плата педали эффектов, установленная в 3д-печатный корпус
Толщина стенок корпуса составляет 2 мм и он довольно прочный, я даже отказался от дополнительного усиления вокруг кнопки, которое делал в другой педали эффектов - можете пролистать вверх до фото бигмафа с самодельной печатной платой, там можно рассмотреть рёбра жёсткости.
И вот такая красота в итоге получилась:
BigMuff из "мусора"
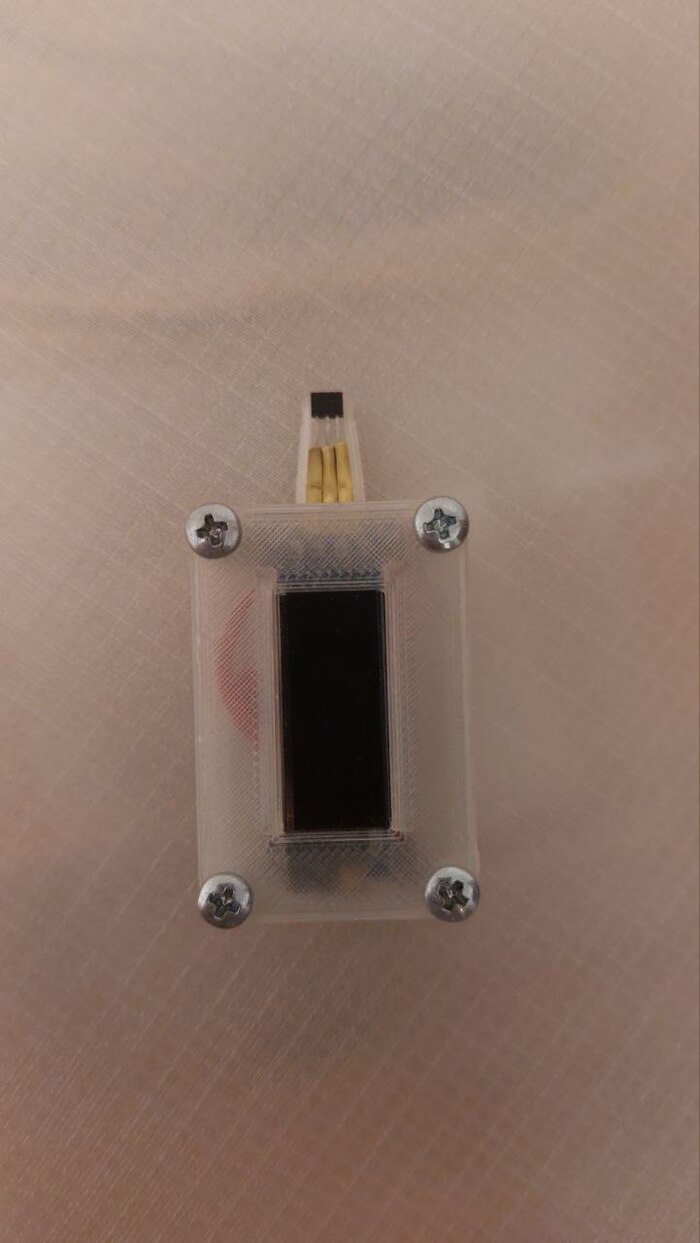
Ну и самая главная фишка в оформлении - нестандартный индикатор включения педали!
Педаль эффектов во включенном состоянии
Ура, педаль эффектов готова! Теперь можно послушать конечный результат!
Звук
Звук довольно специфичный, хотелось бы наверное чуть больше гейна, но в целом мне понравилось. Записал небольшой фрагмент звучания педали на видео:
Я остался очень доволен результатом - это был весёлый, несерьёзный и в тоже время интересный проект, от которого я получил большое удовольствие. Удивительно как из кучи мусора, которая 20 лет лежала в сарае, можно собрать что-то работающее и вполне играбельное. А в моей коллекции педалей ещё одно интересное и даже в каком-то смысле уникальное прибавление!
Надеюсь эксперимент вам понравился, а я в свою очередь благодарю вас за внимание. Пойду обдумывать очередную безумную идею, так что до новых встреч!
Я очень давно засматривался на различные конструкторы гитарных примочек, которые продаются на Aliexpress, но недавно любопытство победило и я решил заказать себе один такой набор для сборки педали Tremolo. Было очень интересно какой звук получится на выходе и что вообще можно ожидать в плане качества от подобных конструкторов.
Покупка
Мне хотелось купить что-нибудь интересное и в поисках наборов для сборки педалей я облазил весь Aliexpress. К моему глубокому разочарованию мне удалось найти только одного продавца таких наборов - Landtone, так что выбор оказался не велик. Если кто-то из читателей найдёт других продавцов с подобными наборами, то буду очень благодарен рекомендации.
Выбор пал не педаль эффектов Tremolo. Я специально не стал покупать наборы для сборки педалей перегруза, так как в юности был опыт покупки дешёвого Distortion, на котором разве что Гражданскую Оборону можно было играть. Испортить педаль эффекта тремоло сложнее, но забегая вперёд, скажу что китайцы справились с этой задачей блестяще, но об этом чуть позже.
Весь набор на момент покупки мне обошёлся в 2643 рубля (примерно 30$ на момент написания статьи). В него входят: электронные компоненты, разведённая печатная плата, фурнитура и покрашенный алюминиевый корпус с предварительно высверленными отверстиями.
Покупал летом, сейчас цена уже другая :(
По современным меркам это не такая уж и большая цена, хотя ещё несколько лет назад такие наборы были значительно дешевле. Да и в целом от 3000 до 4000 рублей были варианты по готовым и главное годным педалям эффектов, но не будем о грустном. Заказ был сделан и осталось немного подождать и приступить к сборке.
Ждать долго не пришлось и уже через некоторое время я забирал свою посылку с почты:
Посылка хоть и пришла быстро, но её очень долго собирали. Скорее всего производитель данных педалей является совсем небольшой компанией, если компанией вообще. Конечно со 100%-ой уверенностью не могу так утверждать, но определённые косвенные признаки на это намекают.
Упаковано кстати неплохо, даже потрудились сделать фирменные наклейки и вложили визитку. Правда указанный сайт на визитке не работает - ещё один признак небольшого продавца. Скорее всего все заказы идут с Aliexpress и обслуживание сайта посчитали нецелесообразным.
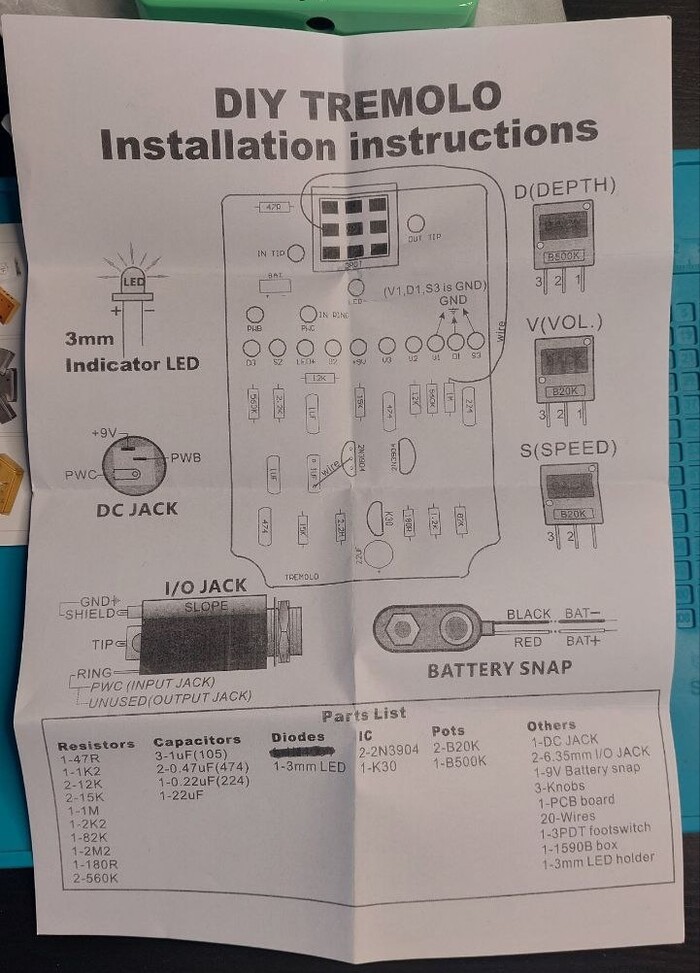
К набору идёт монтажная схема, на которой показано что с чем соединять, чтобы это заработало. В целом всё довольно просто и понятно, но меня интересовала ещё и принципиальная электрическая схема. На Хабре есть хорошая статья про педали эффектов тремоло (https://habr.com/ru/companies/ruvds/articles/761718/) и там как раз фигурирует данный набор + приложена схема якобы от этой примочки. Но на самом деле это не совсем так - схема благополучно была скопипащена с форума (https://www.diystompboxes.com/smfforum/index.php?topic=109499.0) и к педали Tremolo от Landtone не имеет никакого отношения, хотя принцип работы действительно схож.
Я попробовал выпросить принципиальную электрическую схему у Дядюшки Сяо с Алиэкспресса, но он сделал вид что меня не так понял и выслал опять монтажную схему, ну да ладно. Обратите сейчас внимание на перемычку, которая соединяет базу транзистора 2N3904 с конденсатором и запомните - чуть позже мы к ней вернёмся :)
А вот качество изготовления корпуса мне понравилось - покрашено всё хорошо и вживую выглядит добротно:
Конечно мелкие косяки есть, но не критичные и практически не заметные:
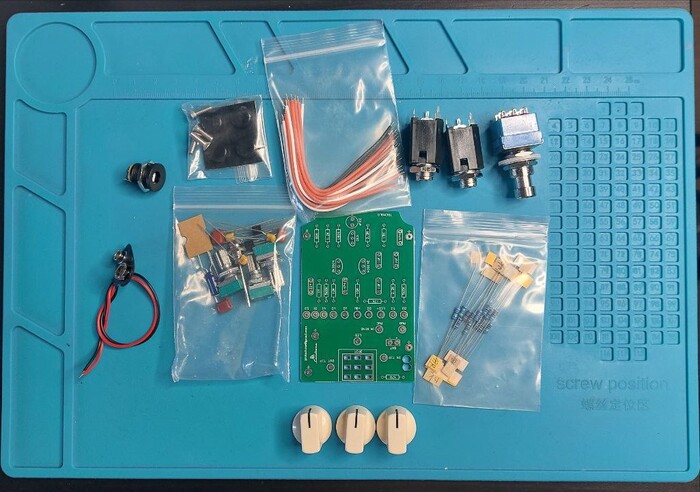
Компоненты конечно самые дешёвые, ну а что я хотел за такую цену?) А вот ручки потенциометров доставили мне эстетическое удовольствие - просто, дёшево и красиво!
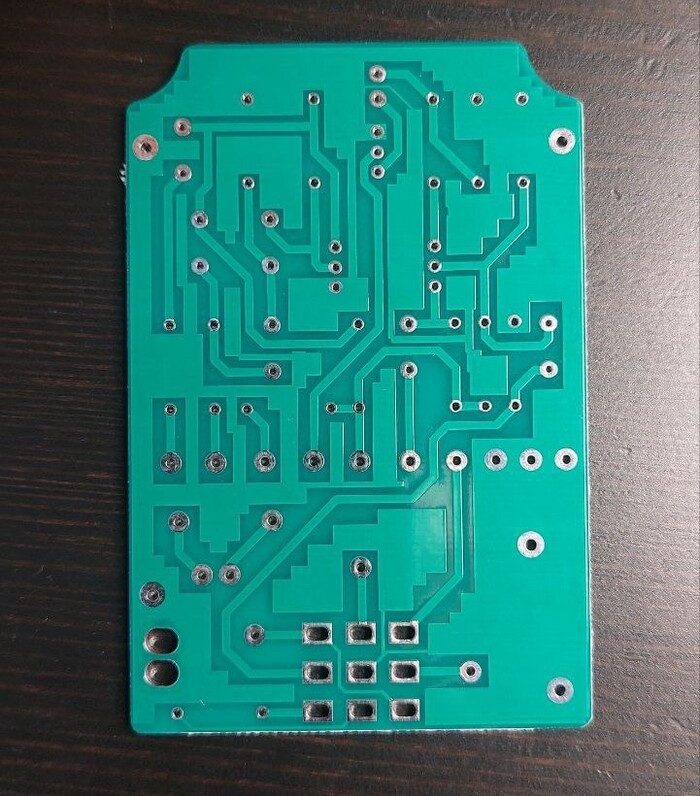
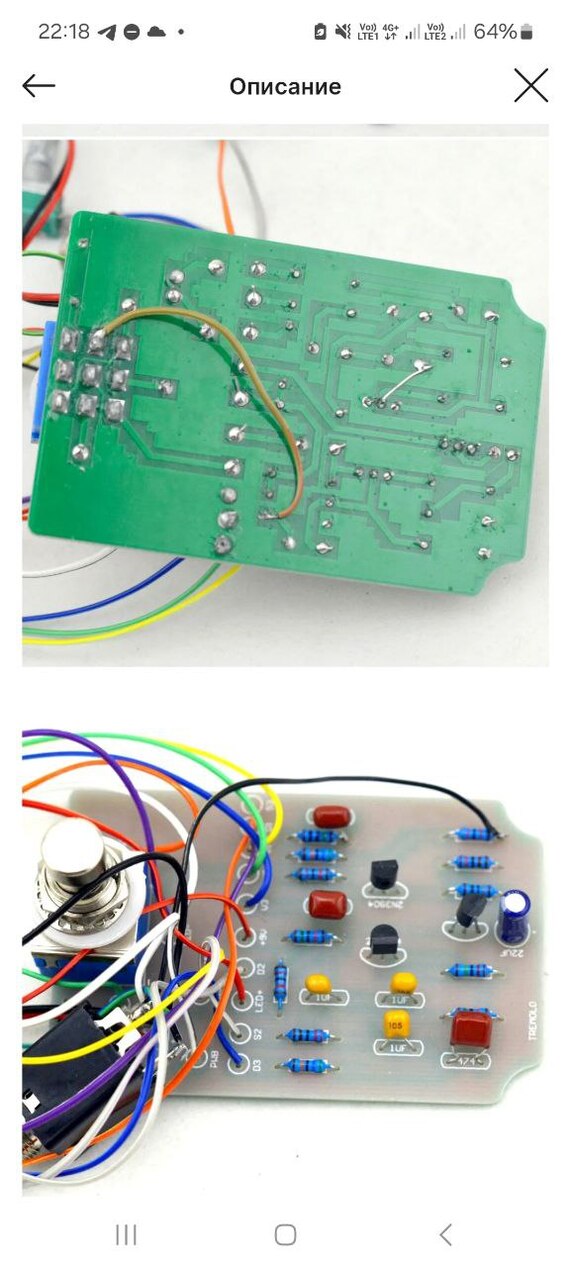
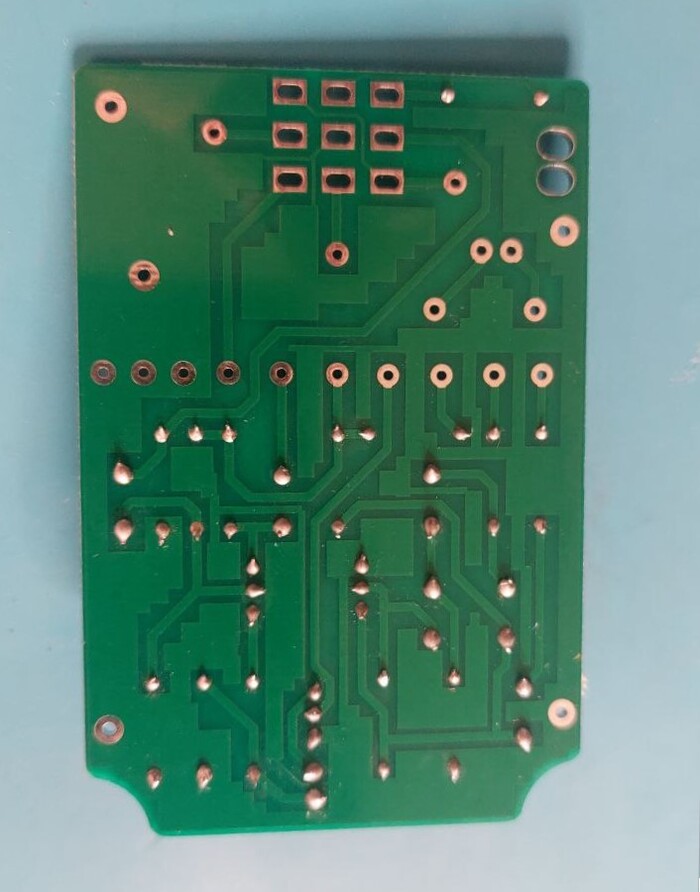
Давайте рассмотрим разводку платы более внимательно и заодно вспомним про перемычку из монтажной схемы:
На самом деле перемычка тут никакая не требуется, всё разведено правильно. Не верите? Хоба:
На этом скриншоте совершенно другая разводка платы со всем вытекающим колхозом в виде перемычек. То есть мне повезло, дядюшка Сяо на досуге всё-таки решил переразвести плату и мне досталась более совершенная версия. Хотя как видим - старый вариант прекрасно продавался ранее и даже поучаствовал в фотосессии и никого не смущал и не смущает до сих пор. Я бы честно говоря перефоткал бы и перерисовал бы монтажную схему, зачем лишний раз позориться на весь мир? :)
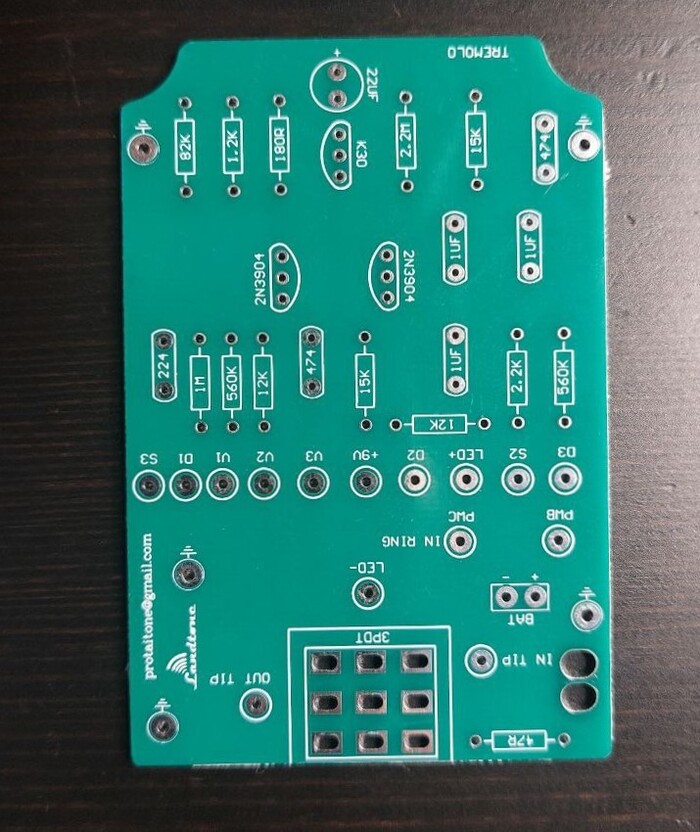
Так же удобно что на плате всё размечено, так что собрать конструктор будет действительно несложно. Монтажная схема по факту требуется только в самом конце, чтобы правильно соединить плату с питанием, входом и выходом:
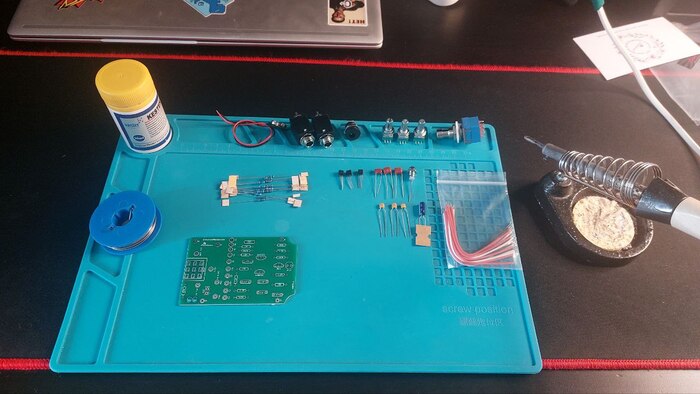
Далее я разложил компоненты и потихоньку приступил к сборке. Вообще мне очень нравится идея таких наборов - дать человеку собрать что-то крутое и полезное своими руками! Одно дело купить педальку и порадовать внутреннего музыканта, и совсем другое дело - порадовать и внутреннего музыканта и внутреннего рукожопа инженера!
Когда я работал за заводе, технология сборки была примерно такая (давно дело было):
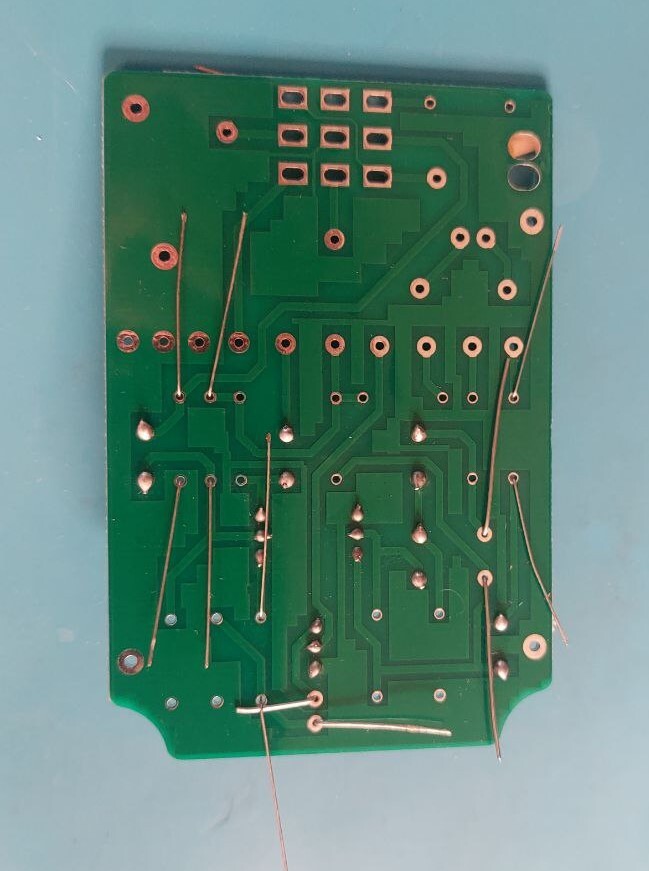
На печатную плату устанавливались все компоненты и загибались ножки
Лишнюю длину ножек подрезали и обрабатывали места пайки флюсом
Погружали нижнюю часть платы в ванну с оловом и всё само припаивалось
В конце оставалось только смыть остатки флюса
Скорее всего подобное можно встретить и сейчас, но в большинстве случаев сборку выполняет специальный станок. У нас ещё тогда была парочка таких в соседнем цеху, но при этом ручной труд сохранялся.
Я устанавливаю и припаиваю электронные компоненты малыми группами - мне так удобнее:
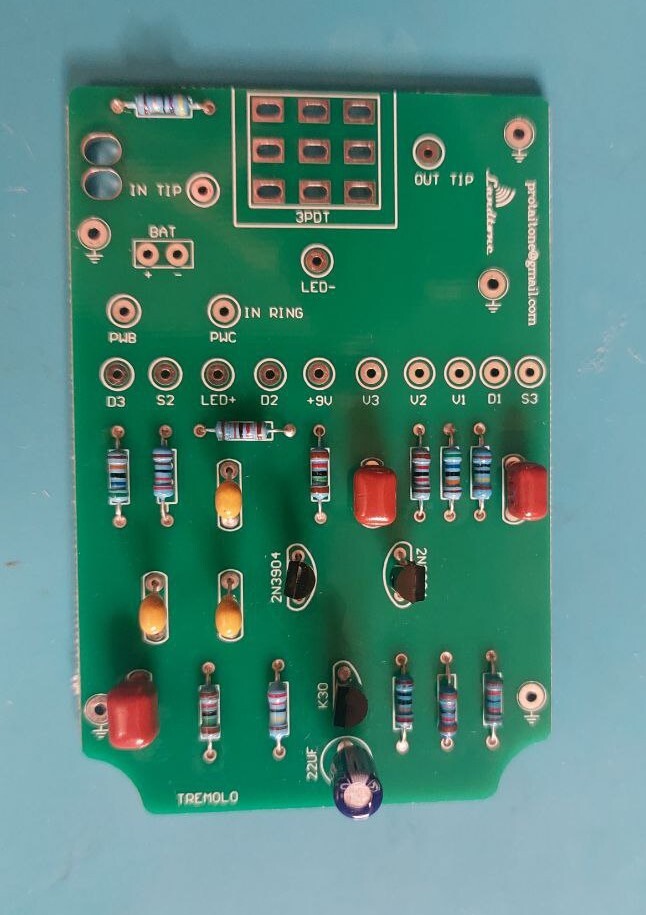
На фото ниже большая часть компонентов смонтирована на плату, получается довольно аккуратно:
А так выглядят смонтированные компоненты с лицевой стороны платы:
Собирал педальку вечером и не все фото удались, приходится выкладывать что получилось :) Но я думаю общая картина понятна.
Собирать надо внимательно, чтобы ничего не напутать, особенно если ранее не сталкивались с электроникой. Одна ошибка и новичку будет очень сложно понять в чём дело - вместо работающей педали эффектов будет разочарование.
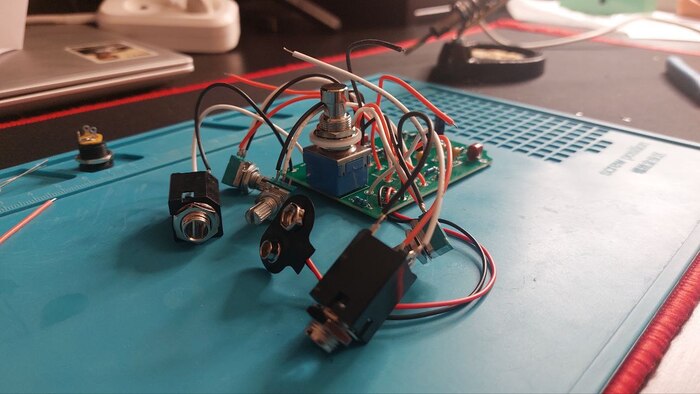
Осталось установить футсвич на плату, а так же припаять выводы всех потенциометров, гнёзд и светодиода. Тут есть один важный момент: светодиод и разъём питания устанавливаются с внешней стороны корпуса, поэтому их будем монтировать в самом конце. А пока можно заняться потенциометрами и разъёмами под джек:
Обратите особое внимание на номиналы потенциометров - они разные, не перепутайте при сборке! В комплекте идёт один потенциометр на 500 кОм и два на 20 кОм и их нужно правильно припаять согласно схеме.
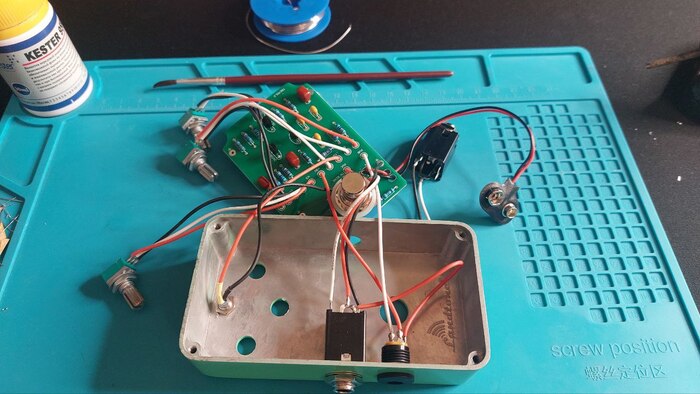
На корпус с внешней стороны я смонтировал светодиод и разъём питания и только после этого появилась возможность припаять их выводы к печатной плате, что конечно не очень удобно, но вот такая особенность есть:
Теперь можно смонтировать на корпус все потенциометры и разъёмы под джек. Педаль тремоло практически готова!
По итогу получается вот такая красота! Педаль действительно выглядит великолепно и её приятно держать в руках. Сборка данного конструктора определённо доставляет удовольствие, но есть и ложка дёгтя, на которую я намекал в самом начале статьи.
Если всё собранно правильно, то педаль функционирует - эффект тремоло есть, он настраивается, все крутилки работают, всё как положено. Сам же звук отдаёт лёгким грязноватым перегрузом, особенно это ощущается при резких ударах медиатора по струнам и игре аккордов. Если сравнивать с педалькой Yerasov Delay, то там со звуком всё хорошо - нет никаких лишних шумов, призвуков и перегруза.
Этот факт уже омрачает общее впечатление от конструктора, ведь хочется не только самостоятельно собрать педаль эффектов, но и в дальнейшем её использовать. В данном случае для использования педаль не подходит, так как сильно ухудшает звук, хоть и добавляет к нему эффект тремоло.
Вывод: сама идея конструктора гитарной педали очень интересная, но в данном случае покупка сомнительная. Хотелось бы конечно более проработанный конструктор с более качественными компонентами, пусть и дороже. Данная педаль ожиданий в полной мере не оправдала и в дальнейшем использовать её я не смогу, хотя удовольствие от сборки конечно получил.
Несмотря на то, что студенческие годы далеко позади, электрогитара и увлечение музыкой остались в моей жизни как хобби. А инженерный бэкграунд и неугасаемое любопытство привели к тому, что несколько месяцев назад я увлёкся темой изготовления звукоснимателей и начал погружаться в этот удивительный мир, изучая и конспектируя литературу. Но теория должна подкрепляться практикой, поэтому в какой-то момент мне понадобился намоточный станок и я решил его изготовить самостоятельно. В наличии имеется 3d-принтер, в Компас 3D работать немного умею и с Arduino факультативно знаком, а вот с ТММ (Теория Машин и Механизмов) уже всё гораздо печальнее, но это не повод сдаваться!
О намотке катушек звукоснимателей
Данная статья именно про изготовление намоточного станка, но так как планируется мотать катушки звукоснимателей для электрогитары, то придётся учитывать определённую специфику при его проектировании.
Для начала разберёмся с типами намотки, их всего 2:
Ручная намотка - двигатель вращает катушку, а оператор контролирует натяжение и укладку провода (провод скользит между пальцев). Повторяемость характеристик при таком методе намотки остаётся весьма условной и зависит от опыта оператора. Отсюда и легенды про гипотетическую "бабу Зину с Фендера", которая в 60-х мотала датчики с "тем самым" звуком :) В наше время, звукосниматели намотанные вручную, называют "бутиковые" - звучит солидно, хоть и сомнительно.
Автоматическая намотка - шаг намотки, натяжение, скорость, паттерн укладки - всё контролируется высокоточным станком с ЧПУ. Тут уже не забалуешь, поэтому повторяемость характеристик остаётся высокой, что на мой взгляд является несомненным преимуществом.
Оба типа намотки остаются сегодня востребованы, но станок для ручной намотки значительно проще по своей конструкции, поэтому я решил двигаться от простого к сложному и остановился на первом варианте. Но от идеи создания станка для автоматической намотки я не отказываюсь - некоторые наработки имеются.
Теперь про толщину провода - он очень тонкий. Например если взять тот же AWG 42, то диаметр медной жилы составит всего 0,0635 мм. Мотать такой провод нужно очень осторожно - лишние нагрузки могут привести к его растяжению или обрыву, а ни того, ни другого мне не надо.
Первый неудачный прототип станка
Первый вариант намоточного станка оказался не очень удачным, так как я несколько спешил - уж очень хотелось послушать как звучит "бутиковый" звукосниматель :D
Однако этот прототип очень наглядно продемонстрировал все возможные проблемы и после их устранения мне удалось добиться нужного качества намотки, поэтому я считаю чрезвычайно важным его продемонстрировать.
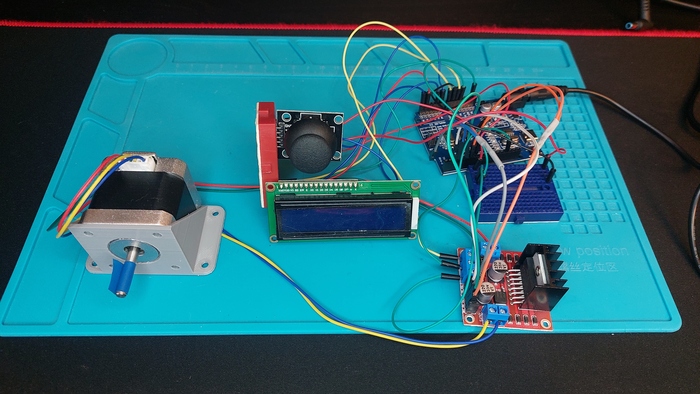
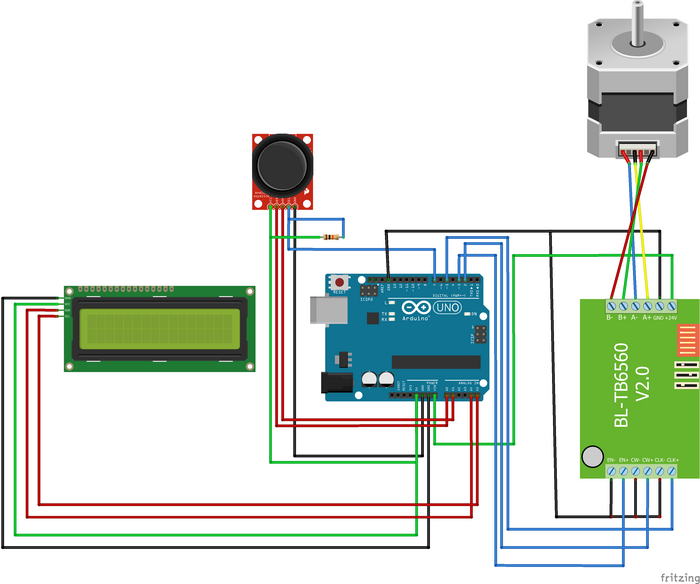
Началось всё со сборки макета и написания к нему скетча:
За основу я взял Arduino UNO (точнее плату c Aliexpress, внешне напоминающую Arduino UNO), так же заказал джойстик и дисплей 1602 + I2C, чтобы задействовать минимум пинов на плате.
Чтобы было удобно задавать точное число витков, я решил использовать биполярный шаговый двигатель HANPOSE 17HS4401 в форм-факторе Nema 17. Двигатель реально классный, одно удовольствие с ним работать! А вот с драйвером я промахнулся и вначале поставил L298N. Он достаточно быстро нагревается и двигатель начинает пропускать шаги - это уже выяснилось в процессе намотки первых образцов. В последствии я поставил драйвер TB6560, который отлично справляется со своей задачей.
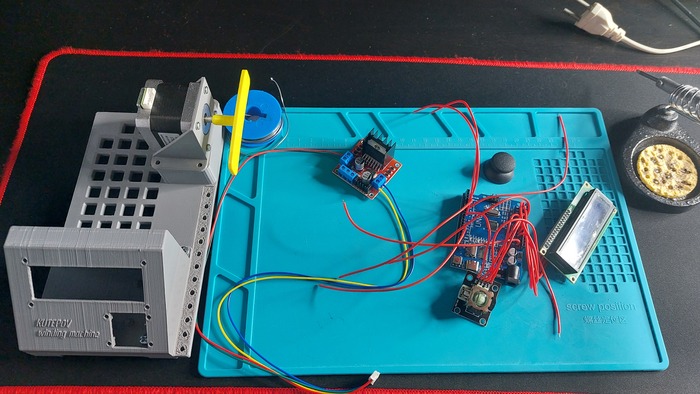
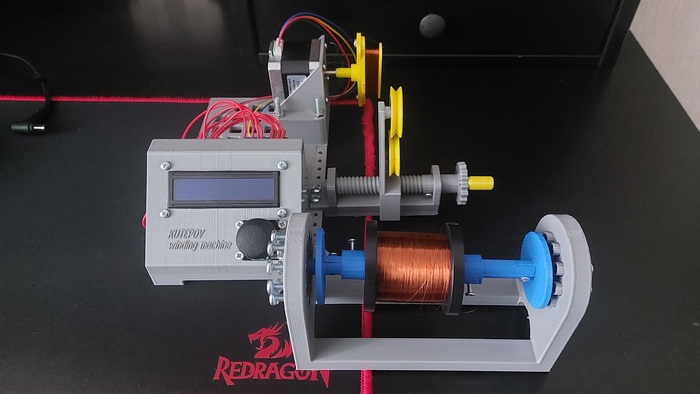
Далее в Компас 3D я спроектировал первые детали станка, в том числе корпус и основание и распечатал, после чего начал сборку:
Само основание сделано так, что можно добавлять разные модули - это очень помогло обкатать некоторые конструктивные решения, затем улучшить их. А вот корпус блока управления нужно было сделать разборным - поместить туда всю электронику и закрутить гайки - было отдельным квестом. На фото ниже частично собранный станок:
Далее был допечатан укладчик и проведены первые испытания:
Теперь я расскажу о проблемах данного решения:
Начну с программного обеспечения - для управления шаговым двигателем первоначально я использовал стандартную библиотеку Stepper. К сожалению она не сильно гибкая в настройках и подходит только для самых простых случаев. Например двигатель запускался сразу с заданной скоростью без ускорения, что создавало в моменте высокую нагрузку на провод и он просто рвался. В итоговом скетче, который будет ниже, использована другая библиотека - AccelStepper.
На укладчике нет ни демпфера, ни натяжителя - предполагалось что я буду слегка притормаживать бобину рукой, но это оказалось плохим решением. Можно было просто выкинуть укладчик из конструкции и укладывать провод пальцами, но мне захотелось чтобы натяжение контролировалось именно станком - таким образом можно было бы свести к минимуму обрывы провода.
С держателем бобины тоже не всё гладко - бобина раскручивалась по инерции и провод путался, а если её притормаживать рукой, то через некоторое время происходил обрыв от малейшего неосторожного движения. Появилась задача придумать очень деликатный тормоз бобины: провод должен сходить максимально легко, при этом бобина не должна раскручиваться по инерции и путать провод.
Работа над ошибками и итоговый вариант
Я распечатал совершенно новый держатель бобины:
Здесь уже 2 точки опоры вала и запроектирован магнитный тормоз на небольших неодимовых магнитах (5х2 мм). Усилие можно регулировать как количеством магнитов на тормозном диске, так и расстоянием между магнитами, которое регулируется на держателе. Готовый держатель бобины выглядит так:
На держателе по кругу расположены 10 магнитов и ещё буквально по паре магнитов на тормозных дисках с 2-х сторон, на мой взгляд этого достаточно для создания оптимального усилия - тут главное не переборщить. Вал с катушкой установлен на подшипники 608ZZ, таким образом вращение достаточно свободное, чтобы легко сходил провод, но при этом магниты не дают бобине раскручиваться по инерции.
Далее настала очередь укладчика - нужно было сделать конструкцию более жёсткой, добавить демпфер и регулируемый натяжитель провода. Демпфер нужен для компенсации дополнительной нагрузки на провод, которая возникает из-за вытянутой формы катушки.
Кроме этого, был случайно проведён незапланированный краш-тест станка, в результате чего уцелели не только лишь все детали. Пришлось в качестве основания взять лист фанеры размером 30х30 см. и смонтировать всё заново.
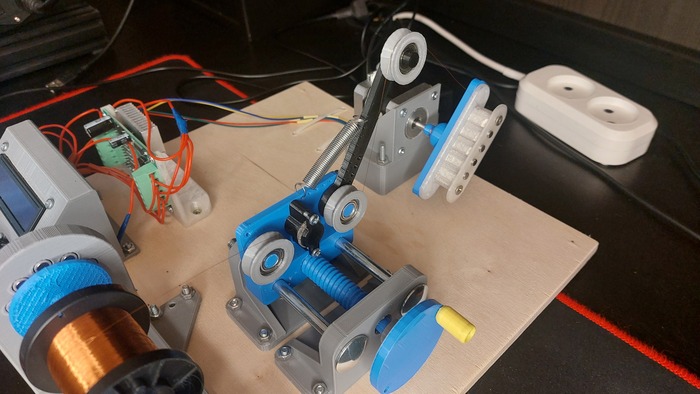
Вот так выглядит обновлённый укладчик:
Конструкция стала более жёсткой, люфты ушли. Вместо прецизионных валов я использовал гладкие мебельные болты DIN603 (8х100 мм) из Леруа Мерлен - по ним прекрасно скользит укладчик. Для станка с автоматической намоткой такой номер не пройдёт - там очень важна точность, а для ручной намотки такое решение очень даже подходит.
В качестве демпфера выступает журавль на пружине и ограничителем хода. Основание журавля установлено на подшипник 688ZZ, чтобы избежать лишних люфтов. Те же подшипники используются в роликах. А вал червячного механизма уже на подшипниках 608ZZ.
В качестве натяжителя выступает конструкция, которая зажимает проволоку между двумя войлочными дисками - это довольно распространённое решение и тоже показывает себя хорошо на практике. Винтами можно регулировать силу натяжения провода, от которой в конечном итоге зависит и качество намотки, и характеристики катушки. Для станка с автоматической намоткой натяжение необходимо ещё и измерять, чтобы можно было точно отрегулировать станок.
На заднем плане виден новый драйвер шагового двигателя - TB6560, про который я рассказывал ранее. Он хорошо справляется со своей задачей и не перегревается при долгой работе + в нем присутствует масса настроек (ограничение тока, делитель шагов). Такой драйвер можно использовать и для станка с автонамоткой.
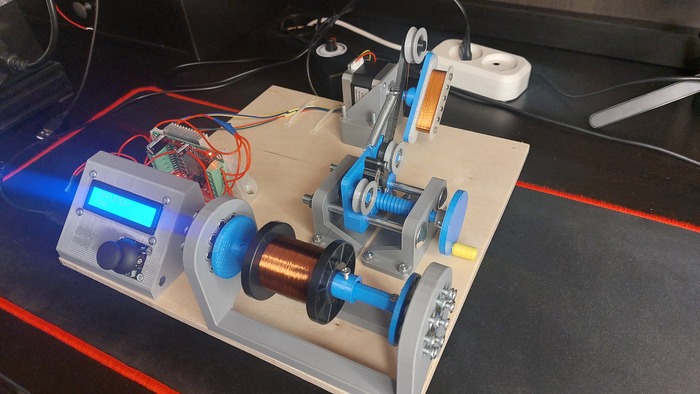
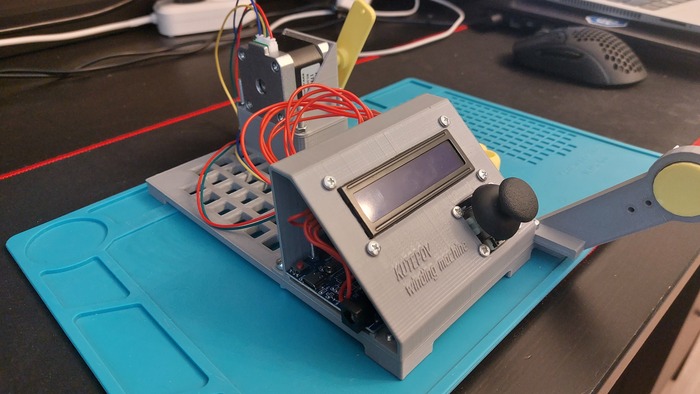
Готовый результат
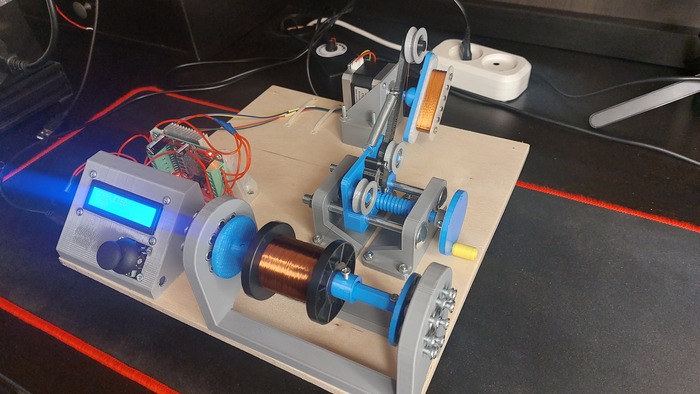
Так выглядит готовый станок целиком. На этом фото уже намотана первая тысяча витков на катушку звукоснимателя:
Впечатления от станка у меня положительные, работать укладчиком вполне удобно, провод пока ни разу не порвался в процессе намотки и натяжение провода постоянное. Все проблемы первой версии исправлены и появились наработки для того, чтобы в будущем сделать станок уже с автонамоткой. Но, как я уже писал, для автонамотки требования к станку значительно выше и конструктивные решения будут совсем другими, иначе не получится выдержать точный шаг и укладка провода будет идти плохо.
Общая схема электронной начинки станка выглядит так:
В меню станка есть 2 настройки: число витков и скорость намотки. Запуск двигателя происходит плавно с ускорением, а остановка с замедлением, что исключает возникновение ударной нагрузки на провод. После того, как заданное число витков намотано - двигатель останавливается, а намотанное количество запоминается - это позволяет мотать катушку в несколько этапов и по завершении каждой итерации на экране будет высвечиваться точное число намотанных витков на катушке.
Метод runToPosition() является блокирующим, так что подсчёта витков в режиме реального времени нет. Данный метод не рекомендуется вызывать в цикле, как сделано у меня - в библиотеке AccelStepper есть асинхронные методы, которые предназначены для вызова в цикле, но нужно обеспечить при этом быструю работу самого цикла. В моём случае такой возможности нет, так как та же операция обновления экрана не очень быстрая, а ещё нужно проверять состояние кнопок с поправкой на дребезг контактов. Можно добавить ещё одну плату Arduino только для управления двигателем и обеспечить уже там быстрый цикл, а первую плату оставить на пользовательский интерфейс и настроить обмен информацией между ними, тогда должно получится отображать число намотанных витков уже в процессе намотки без ущерба скорости вращения двигателя, но в данном станке такую доработку выполнять я не планирую.
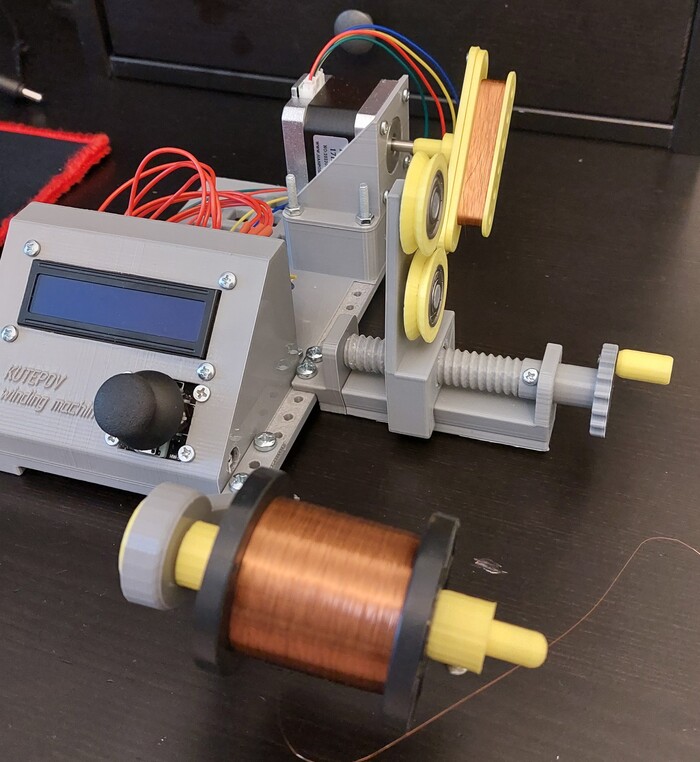
Результат работы намоточного станка
С помощью данного намоточного станка я успешно изготовил первые образцы звукоснимателей и теперь они проходят испытания:
Он же в одной из моих электрогитар:
Про сами звукосниматели рассказывать пока рано - ещё предстоит много экспериментов, измерений и доведений до ума. Но если будет интересно, в будущем напишу статью и на эту тему.
В данном видео я покажу как своими силами приводил в порядок гриф, не имея опыта в ремонте гитар. Подобные действия я бы ни в коем случае не стал повторять с дорогим инструментом, а сразу бы отнёс его к мастеру. В случае же с бюджетной гитарой, работа мастера может обойтись дороже чем стоит сам инструмент.
По итогу я выполнил следующие работы:
Отшлифовал лады
Заменил верхний порожек на костяной
Заменил колки на локовые
- Заменил ритейнеры
- Заменил ржавые винты на пикгарде
- Навёл чистоту и пропитал гриф лимонным маслом
- Смазал графитовой смазкой места опоры струн
- Заменил струны
Что из этого получилось, вы можете увидеть в моём новом видеоролике!
Видео ни в коем случае не является инструкцией и за мной повторять не нужно :)
Возможно ли недорогую электрогитару довести до идеала, а главное - насколько целесообразно?
Недавно я задался целью привести в порядок свою первую электрогитару, которую купил в далёком 2007-м году. В этом видео я покажу в каком состоянии гитара сейчас и какие работы требуется произвести, чтобы добиться максимально хорошего результата, а главное - попробую оценить сколько это может стоить.
Всё что я расскажу - актуально практически для любых бюджетных электрогитар, произведённых в Китае и массово продающихся на AliExpress. А главное, вы получите ответ на популярный вопрос: покупать бюджетную гитару и дорабатывать или сразу купить хороший музыкальный инструмент?
П.С.: Первая часть анонсированного в видео апгрейда гитары успешно выполнена (отшлифованы лады, заменён верхний порожек, поставлены локовые колки и заменены ретейнеры). Всё прошло удачно, но не без сложностей, так как делал первый раз. Материал монтируется и через некоторое время будет доступен - там есть что показать и рассказать.
Большинство учебных примеров на Java могут выглядеть не очень увлекательно, например консольный калькулятор или клиент-серверное приложение ping-pong.
Я подготовил простой, но в то же время интересный учебный пример для тех, кто только начал изучать Java. На видео я показываю как написать собственный сканер портов!
Сканер портов - очень важная утилита, которая помогает найти открытые порты на сервере. Используется как хакерами для разведки и первоначального сбора данных о ресурсе, так и админами для аудита безопасности. С помощью сканера портов можно выявить открытые порты на собственном ресурсе и принять меры по улучшению безопасности. В этом видео я покажу как написать свой собственный простейший сканер и покажу как он работает.
Часто бывает необходимо, чтобы приложение выполняло какие-то действия регулярно, в определённое время. Например каждое утро выгружать актуальные данные из стороннего сервиса, инвалидировать кэш в конце дня и т.п. Для этих целей в Spring существует встроенный планировщик задач, он же Scheduler. В этом видео я расскажу о том, как работать с планировщиком задач в приложении на Spring Boot, как его настроить в своём проекте и какие возможности у него есть.