Роботы, предназначенные для работы в экстремальных условиях, например, при высоких температурах, при сверхнизких температурах или в большом температурном дипазоне, в агрессивных химических средах, при большом давлении или в условиях ионизирующих излучений, высоких напряженностей магнитных полей и так далее
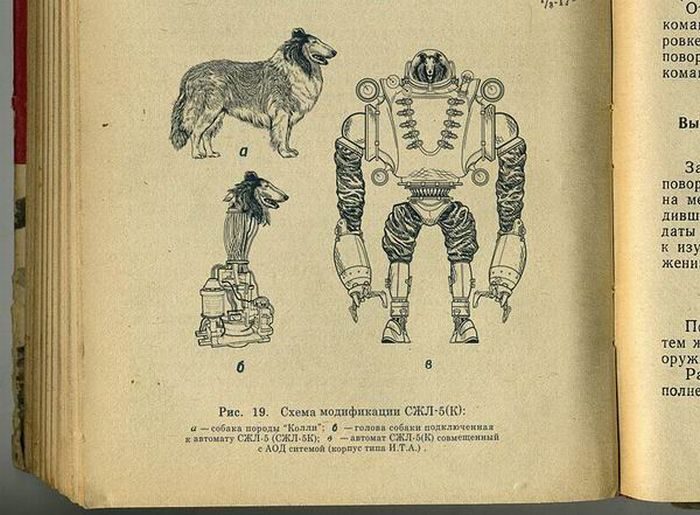
… Конец 1950-х и начало 1960-х время значительных успехов в области научных экспериментов во всем мире и в СССР. В те годы начались смелые эксперименты советских ученых над животными. В Московском университете и Академии наук был выполнен ряд пионерских исследований. И уже в 1950 году русский ученый Владимир Демихов удивил весь мир, когда трансплантировал собачью голову на другую собаку. Двухголовая собака прожила целый месяц.
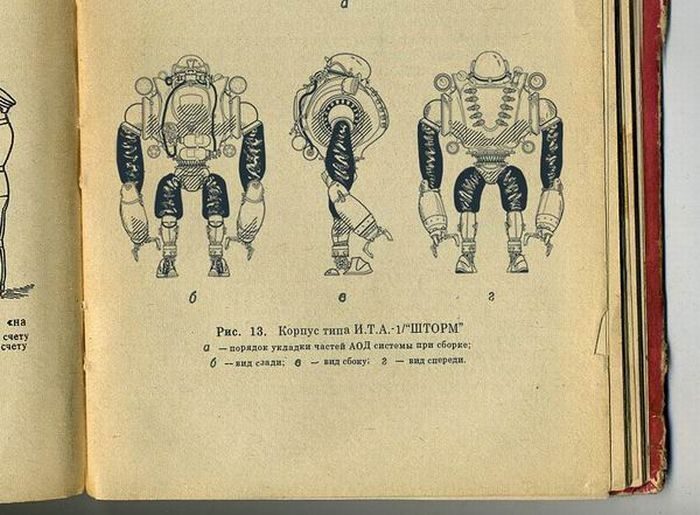
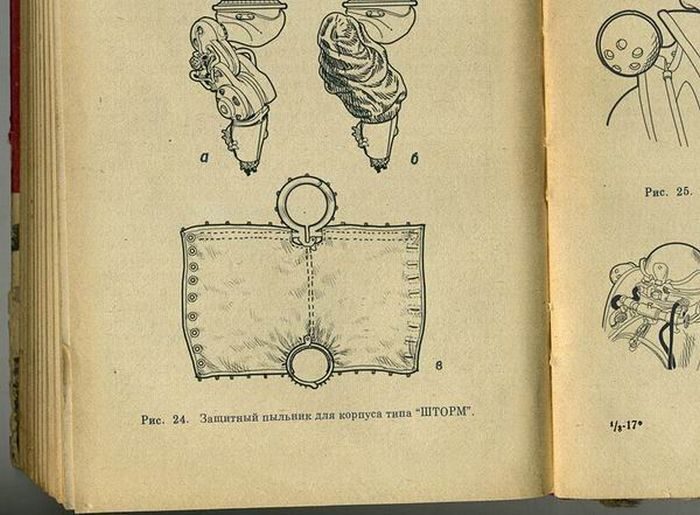
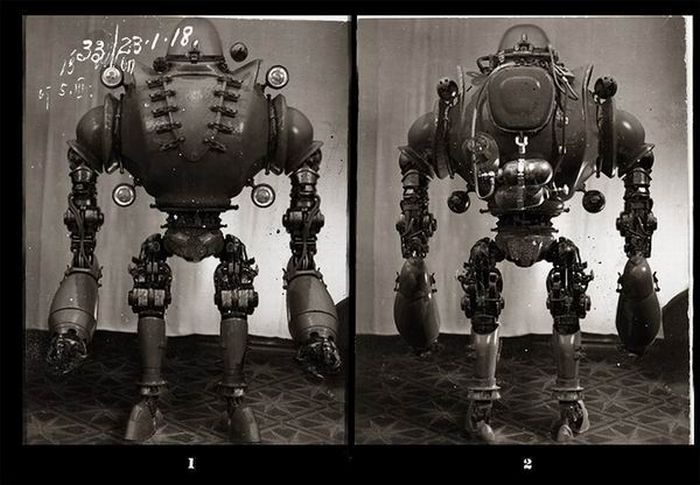
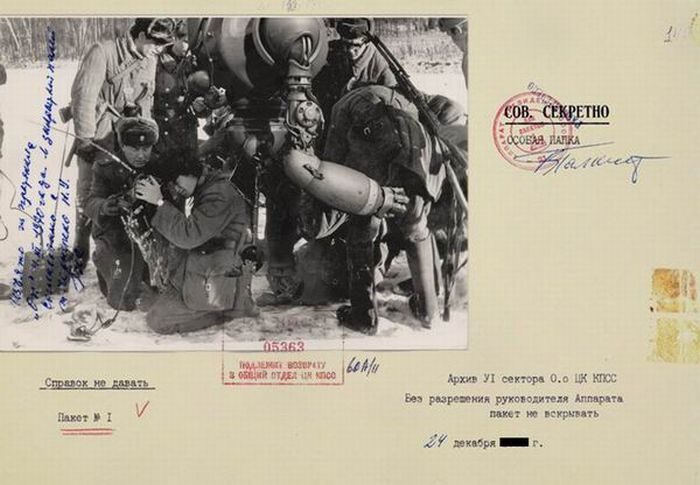
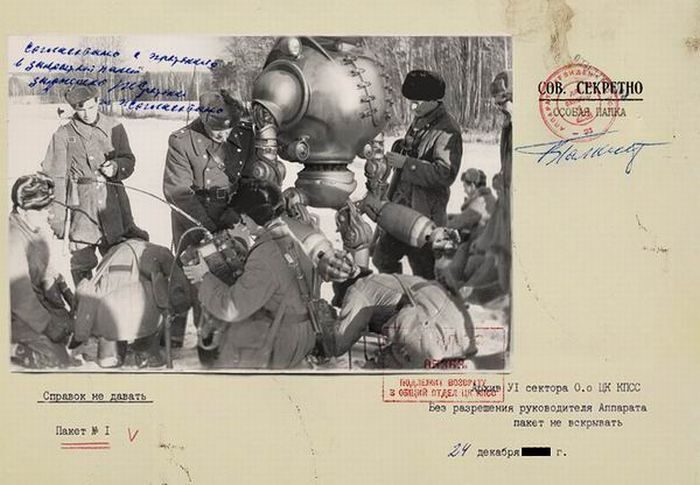
В первый период холодной войны были привлечены все силы советской науки для создания совершенного оружия. В 1958 году стартовал секретный советский проект по созданию робота-киборга. Научным консультантом был лауреат Нобелевской премии В. Мануйлов. В конструировании робота за исключением конструкторов участвовали медики и инженеры. Для экспериментов с целью подтверждения безопасности для человека предлагались мыши, крысы и собаки. Рассматривался вариант экспериментов над обезьянами, но выбор пал на собак, так как они лучше поддаются дрессировке и более спокойны чем обезьяны. Впоследствии этот проект получил имя «КОЛЛИ» и просуществовал почти 10 лет. Но указом ЦК от 4 января 1969 года деятельность проекта «Колли» была прекращена, информация стала секретной..." В 1991 году все данные по поекту «КОЛЛИ» были рассекречены… В 1991 году вся информация о проекте «Kollie» стала не секретной.
Их есть у нас! Красивая карта, целых три уровня и много жителей, которых надо осчастливить быстрым интернетом. Для этого придется немножко подумать, но оно того стоит: ведь тем, кто дойдет до конца, выдадим красивую награду в профиль!
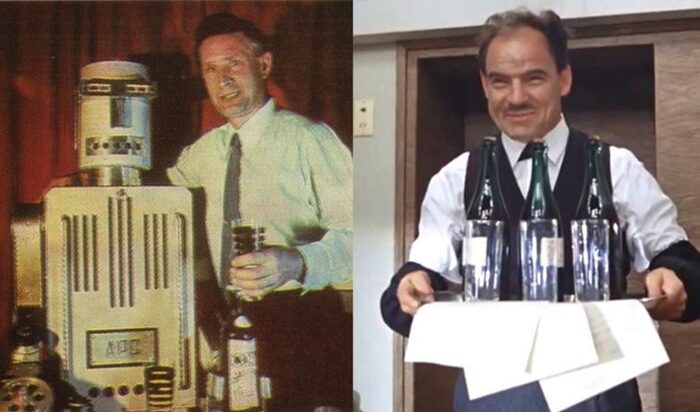
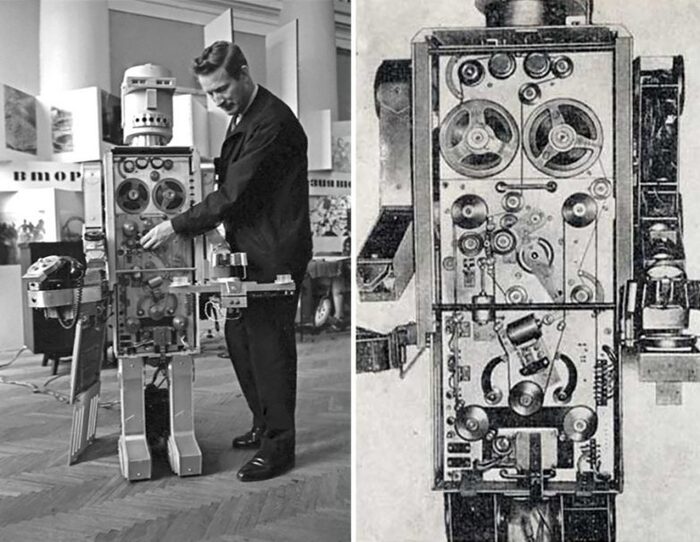
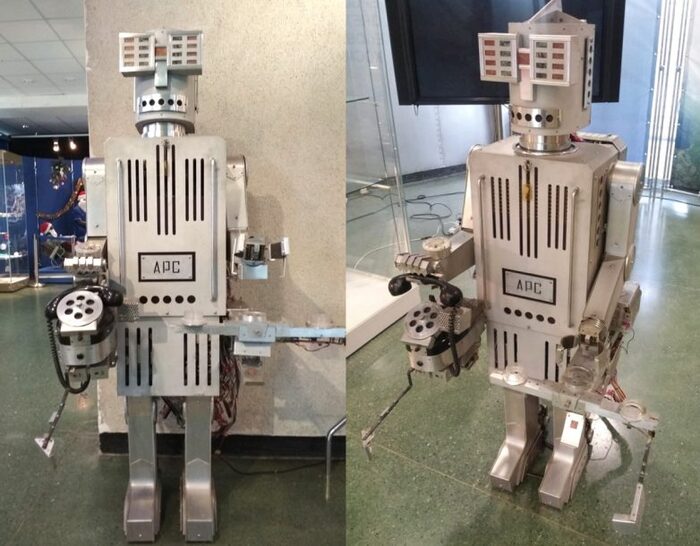
Сейчас много предложений по установке систем «умный дом», но хоть один из них умеет встретить гостя и угостить приятным напитком? То-то же… А робот АРС Гришина все это умел и не только это.
В обязанности робота -секретаря АРС входило:
Будить хозяина в указанное время, включать на магнитофоне запись утренней гимнастики, напомнить о планах на день.После ухода хозяина отвечать на звонки по телефону и записывать сообщения от звонящих, до 30 телефонных сообщений по 2 минуты.В случае кратковременного отсутствия хозяина, просить звонящего подождать у телефона или сообщить через какое время вернется хозяин и можно будет перезвонить.Приносить телефонный аппарат хозяину: -в случае телефонного вызова, -при желании хозяина позвонить.
Если вызываемый абонент занят, то АРС начинает процесс дозвона набором номера через каждые 3 минуты. Как только удается дозвонится-передает трубку хозяину. Самостоятельно набрать номер на телефоне: для передачи сообщения в заданное время, для наведения справки в справочном бюро, для вызова аварийных служб (пожарная, скорая и т.д.) при срабатывании соответствующих датчиков.Включать хозяину в заданное время приемник, телевизор или магнитофон.Записать на магнитофон передачу с приемника, телевизора или трансляционной сети.Включать и выключать освещение в доме, поддерживать заданную температуру в квартире путем регулировки кранов на батареях отопления.Реагировать на стук или звонок в дверь и: -сообщить, что хозяина нет дома и через сколько будет, — если хозяин дома, то открыть дверь гостям. Приветствовать гостей поднятием руки и произнесением заранее записанного приветствия, проводить гостей в гостиную, включить им телевизор или магнитофон, предложить гостям выпить и разлить напиток в бокалы и подать на специальном столике
Друзья, не забываем, что робот разработан в начале 60х и все управление у него электромеханическое, электроники минимум и все аналоговое. Даже телефона кнопочного не было, только дисковый.
Как ни печально, целью создания этого робота было отнюдь не для развлечения Гришина или желание поразить знакомых. У преподавателя черчения калужского железнодорожного техникума Бориса Николаевича Гришина тяжело болела мама и робот АРС создавался как помощник по уходу за больной. Чертежи будущего робота были готовы уже в 1962 году. Три года заняло изготовление и сборка. В 1965 году робот заработал, но еще не мог передвигаться-ноги с электромоторным приводом были сделаны позже. Хотя общий вес робота составил около 100 кг, он легко разбирался и собирался одним человеком за 5 минут, т.к. весь состоял из отдельных блоков, соединяемых разъемами.
«Звуковая» часть робота выполнена на двух магнитофонах: бобинный для записи сообщений звонящих, магнитная лента от стандартного катушечного магнитофона и магнитофон на кольцевой многодорожечной ленте шириной 18 мм с подвижной головкой для озвучки высказываний самого АРСа. Лентопротяжный механизм магнитофонов полностью собственной разработки.
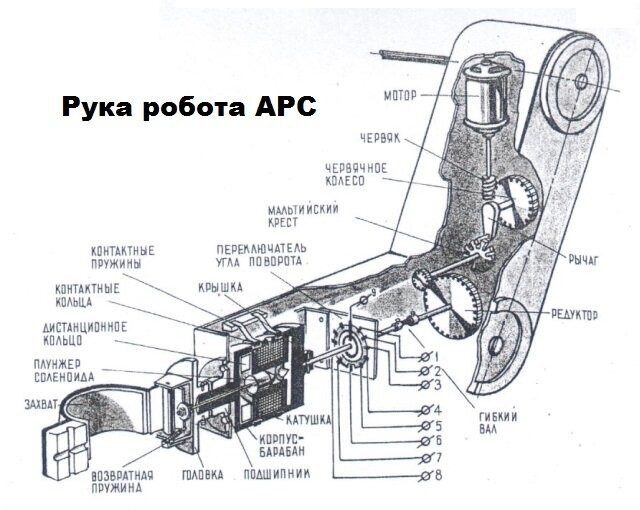
Всеми движениями робота управляют 13 различных электродвигателей. Самым сложным элементом пожалуй является рука, умеющая взять бутылку, дозировано налить в бокалы, поставить бутылку, взять бокал с напитком и подать гостю. Все это выполняет электромеханическое программно-временное устройство с датчиками обратной связи.
В мае 1966 года, журнал «Техника Молодежи» объявляет конкурс на лучшего «человекоподобного робота. В СССР было множество энтузиастов и кружков-заявок на конкурс пришло много. Роботы разгуливали по улицам и пили квас:
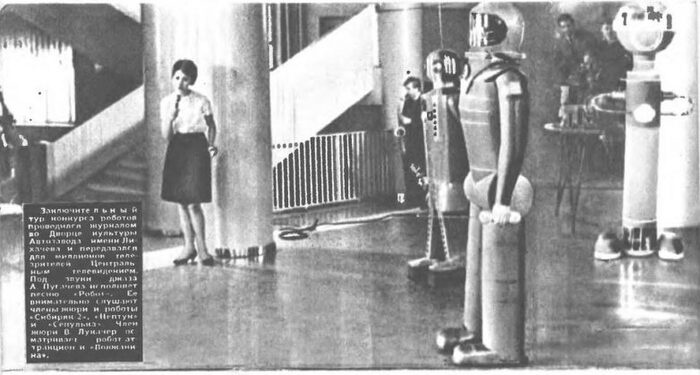
Финал конкурса роботов проходил в фойе ДК завода ЗИЛ, снималась передача для телевидения и пригласили начинающую певицу спеть песню «Робот, мой милый робот»-это было одно из первых выступлений Аллы Пугачевой на телевидении:
на фото поет Алла Пугачева
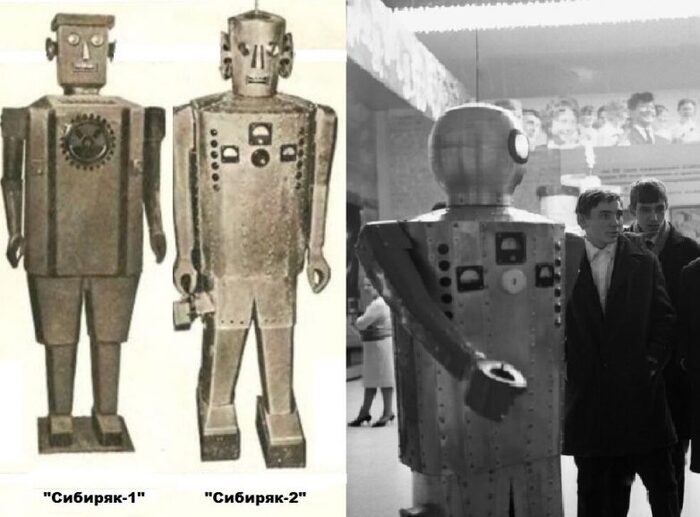
Песенка блестяще спета и согласно сценарию из-за колоны выходит робот великан с букетом цветов. От неожиданности Пугачева в ужасе отскакивает от железного исполина, но вспомнив про кинокамеры быстро входит в роль и принимает букет. Тут заедает механическая рука робота и Пугачевой приходится практически силой вырывать букет у 200 килограммового робота »Сибиряк-2"
На этом конкурсе робот АРС Бориса Гришина получает приз «За самую сложную конструкцию». После этого АРСу пришлось стать героем многих газетных и журнальных публикаций, в том числе и зарубежных и даже сняться в кино
Борис Николаевич Гришин прожил долгую жизнь и умер в возрасте 91 год. Родственники передали робота Калужскому музею истории космонавтики. Была информация, что собираются сделать профилактику начинки робота, чтобы показывать посетителям музея АРСа в действии. Удалось ли это реализовать-не известно.
“Восстание машин” дарит надежду. Как раньше уже не будет, но это не значит, что нас не будет вовсе. До какой границы дойдет восстание машин, что может его остановить? Обязательно ли для этого кровопролитие и “день чернее ночи”? Дадим же любви хоть один шанс! Вторая часть знаменитой игры уже скоро! Ждём!
Фильм СССР. 1986г. Учебных фильмов по тематике "Промышленные роботы", фильм демонстрировался студентам технических специальностей в государственном техническом университете. В нашей стране интенсивная работа над созданием наиболее массовых промышленных роботов началась с конца 1960-х гг. С 1976 г. начинается массовое производство роботов. Уже в 1983 г. на предприятиях страны работало около 7 тыс. роботов и манипуляторов, а за 1981-1985 гг. их выпущено свыше 40 тыс. шт.
🔘 ОБЯЗАТЕЛЬНО оставьте лайк и комментарий ----------------------------------------- 🔴 ПОДПИСАТЬСЯ, ЕСЛИ ВЫ НОВЫЙ, И ВКЛЮЧИТЕ ЗВОНОК Посещайте интересный телеграмм канал Назад в СССР - вспомни как это было! https://t.me/nazad_v_cccp #сварка #робот #фильм #документальный #ссср #красныйпролетарий
Выспаться, провести генеральную уборку, посмотреть все новые сериалы и позаниматься спортом. Потом расстроиться, что время прошло зря. Есть альтернатива: сесть за руль и махнуть в путешествие. Как минимум, его вы всегда будете вспоминать с улыбкой. Собрали несколько нестандартных маршрутов.
Фильм СССР. 1986г. Учебных фильмов по тематике "Промышленные роботы и манипуляторы", фильм демонстрировался студентам технических специальностей в государственном техническом университете. Структура промышленного робота состоит из нескольких систем: исполнительной (двигательной), информационно-измерительной (сенсорной), управляющей (интеллектной) и системы связи (языка). Исполнительная система определяет способность робота совершать различные движения. В качестве исполнительных систем применяются механические манипуляторы, устройства передвижения, электромагнитные и пневматические манипулирующие устройства. Сенсорная система служит для восприятия и преобразования информации о состоянии внешней среды, результатах воздействия на неё исполнительной системы и о состоянии самого робота. В СССР первые промышленные роботы появились в 1971 году; они были созданы под руководством профессора П. Н. Белянина (робот УМ-1) и лауреата Государственной премии СССР б. Н. Сурнина (робот «Универсал-50»). В 1972—1975 годах был создан (усилиями различных научно-производственных организаций) уже целый спектр советских промышленных роботов (в том числе роботы серии «Универсал», ПР-5, «Бриг-10», ИЭС-690, МП-9С, ТУР-10 и другие). 🔘 ОБЯЗАТЕЛЬНО сделай комментарий Посещайте интересный телеграмм канал Назад в СССР - вспомни как это было! https://t.me/nazad_v_cccp #сварка #робот #фильм #документальный #ссср #красныйпролетарий