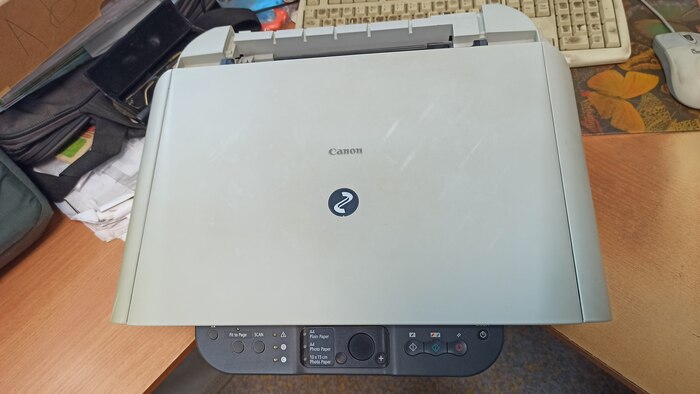
Приведу пример разбора бывшего в употреблении струйного мфу. Принтер я купил через авито, продавец расстался с ним за 150 рублей. Принтер покупался как источник ништяков запчастей при постройке 3д принтера из хлама. В самом начале разбора я извлёк из него импульстный блок питания на 24 Вольта 1.2 А максимум тока. Извлёк и подарил коллеге на работе, ибо после предыдущих разборок у меня ещё 2 бп валяются без дела. Так же из принтера была подарена всё тому же коллеге управляющая плата, но на ней кроме дросселей, операционника LM324, электролитических конденсаторов и прочей мелочевки ничего особо интересного для меня не было. Плата Основана на клоне процессора 80086, так что на неё ещё имеется оперативная память, флеш память, но они мне пока неинтересны, применить их мне некуда.
Начнём разборку.
Вот таш донор запчастей:
начинаем с защёлок на дне
Отгибаю боковую крышку, но дальше она отгибаться не хочет. Ищу что её держит. Отстёгиваю лицевую панель
Под ней саморезы, откручиваю их. Теперь боковые крышки снимаю и верхняя крышка со сканирующей частью висит на проводах, клеммы отстёгиваю, коричневый провод массы, прикрученный к металлической раме внутри - тоже откручиваю, плоские белые шлейфы цинично сдёргиваю. На фото это не попало, фотки битые((
Продолжаю откручивать саморезы и снимаю серую крышку
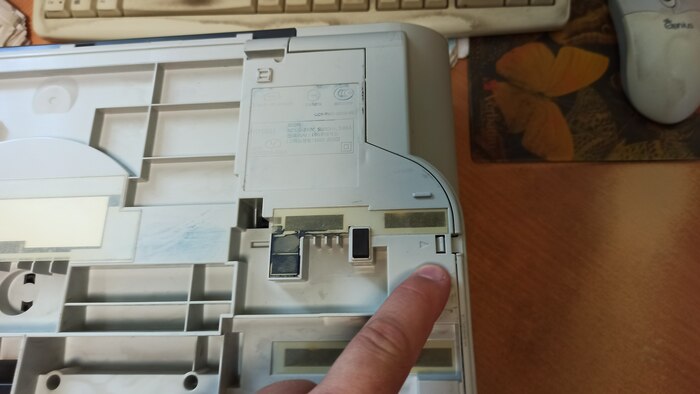
А вот и ценная вещь: сервопривод протягивания бумаги? Под большим пальцем находится механический концевой выключатель и провод для юсб гнезда, для печати с фотоаппаратов
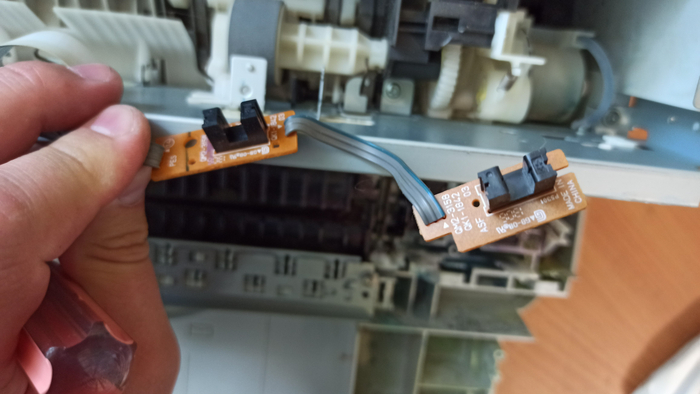
А вот и два оптических концевика, прячущихся за рамой каретки печати. Интересно сколько они(их аналоги) стоят отдельно? В voltiq.ru похожий стоит 180 рублей, вместе с проводникамии разъёмами Dupont на конце. В других магазинах 110-120 рублей.
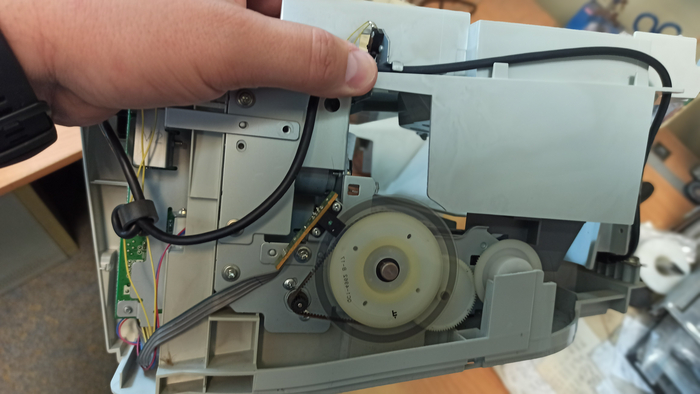
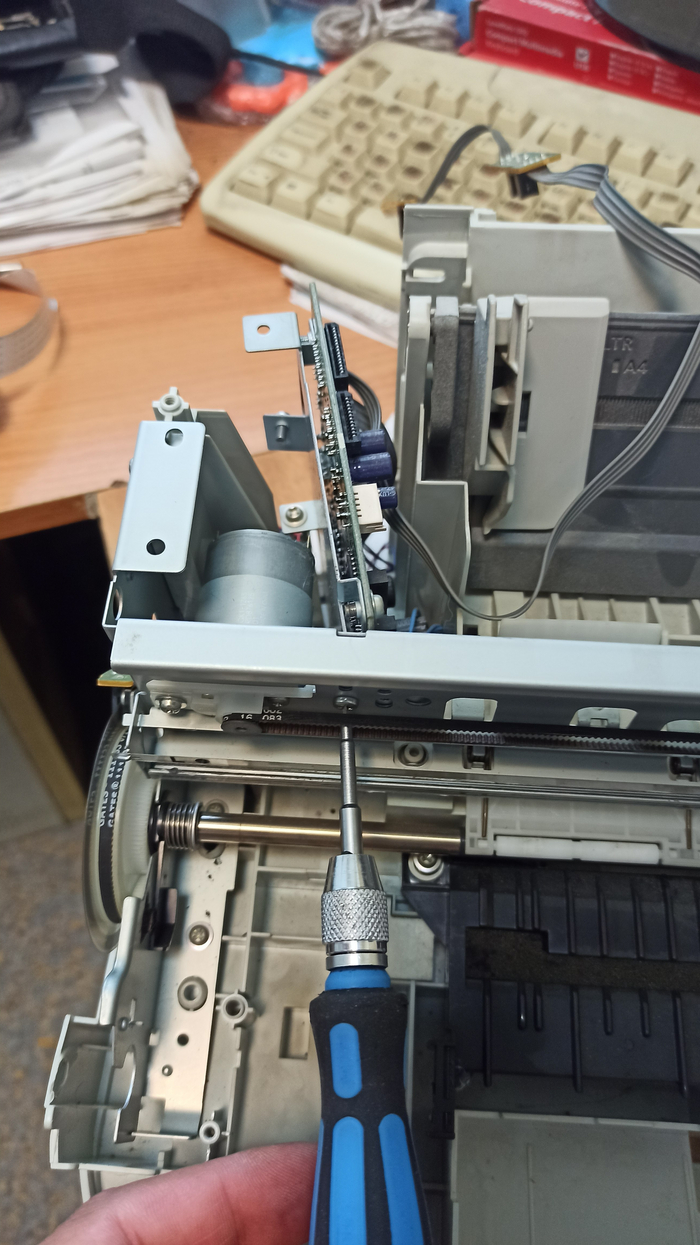
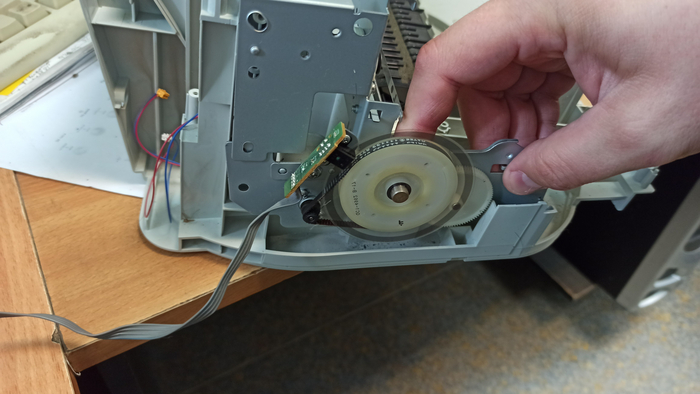
А вот и сервопривод с оптическим датчиком, металлическая рамка сервопривода выглядит довольно знакомо. Ничтоже сумняшеся откручиваю винты, буду извлекать привод без полной разборки, с отгибанием, пыхтением, кряхтением и сопением.
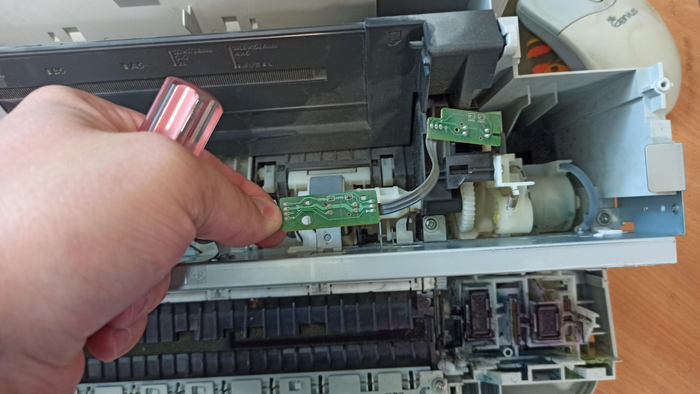
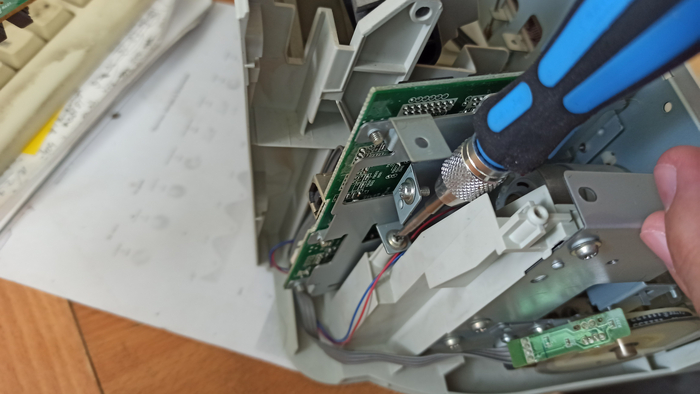
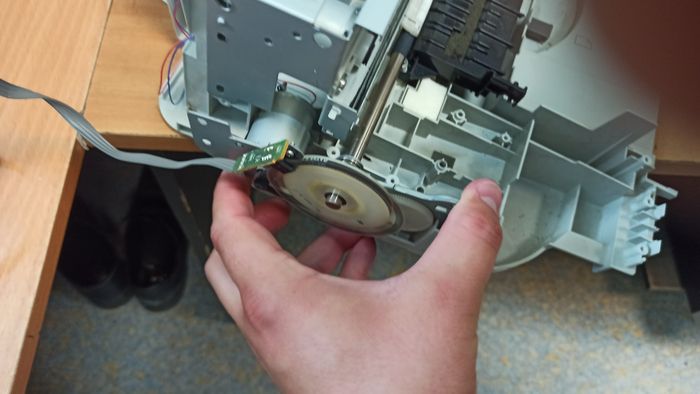
Откручиваю винты платы управления
Она сидит на металлической пластине, вместе с ней и сниму.
Там внизу провода электродивгателя приклеены скотчем, я про них обязательно забуду, а потом буду отлеплять, когда натянутся.
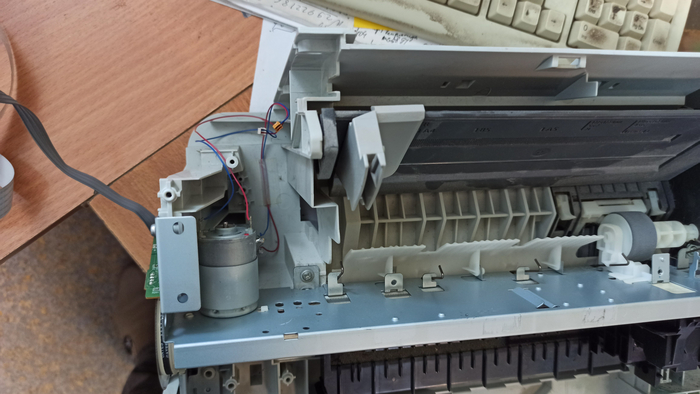
Откручиваю винт, держащий раму печатающей башки вместе с сервоприводом и все остальные винты
Привод начал шевелитсья и подаваться немного
Немного усилий, отгибаем раму и с кряхтением вытаскиваем пластину сервопривода
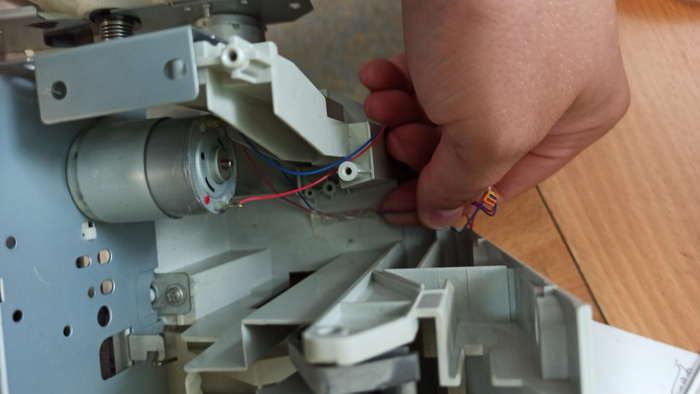
Отлепляю забытый скотч, ну как я мог забыть??!!
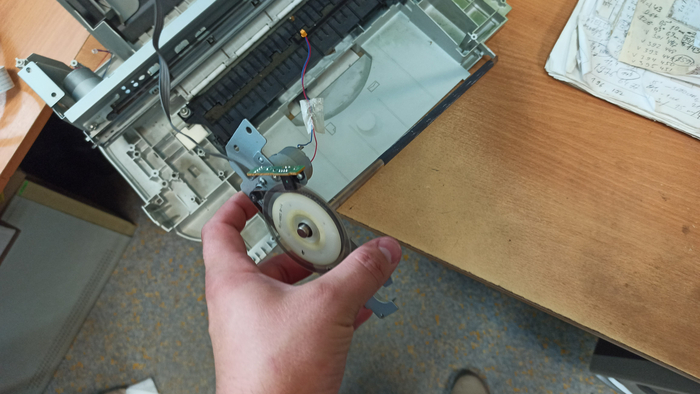
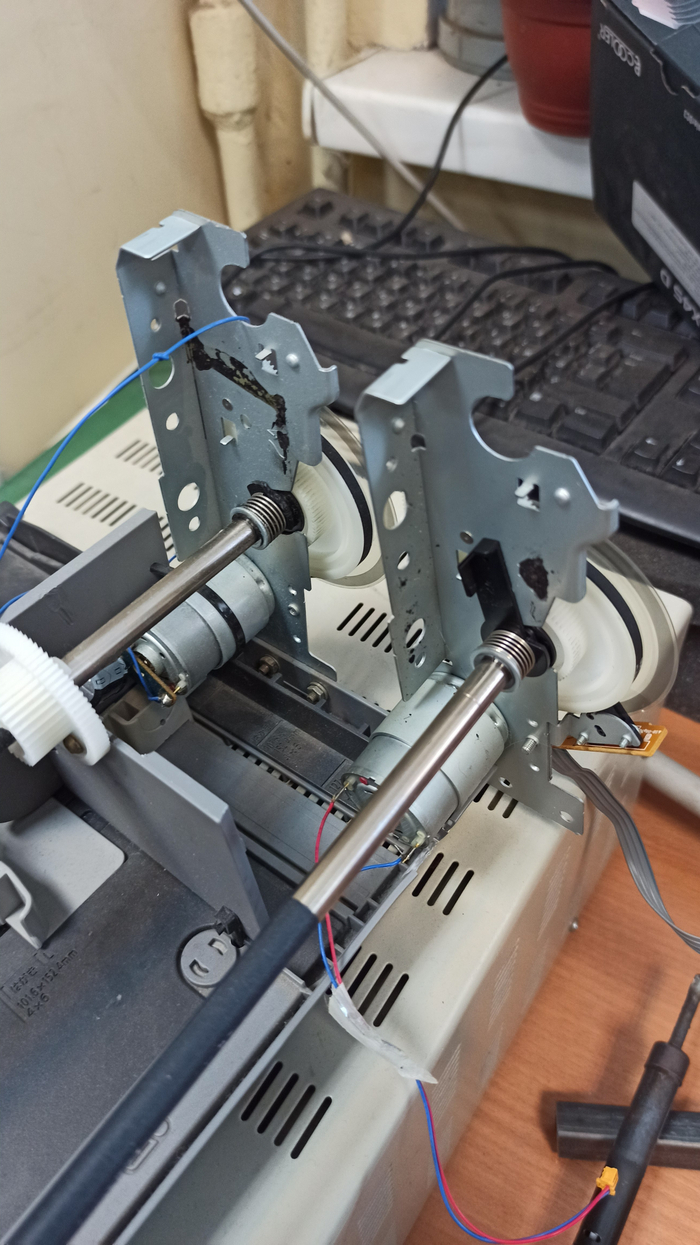
Извлёк, посмотрю на что это похоже.
Брат и Брат2. При разборе прошлого струйника я с сервопривода скрутил оптический датчик, а зря, он был на пластине, пластина гдето во времени и простанстве, но не у меня.
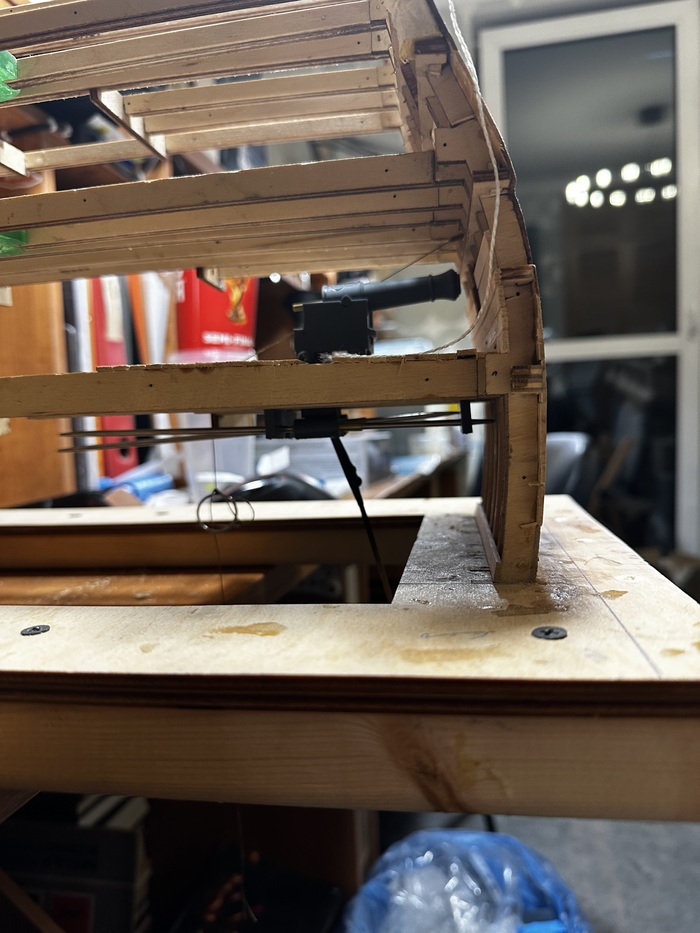
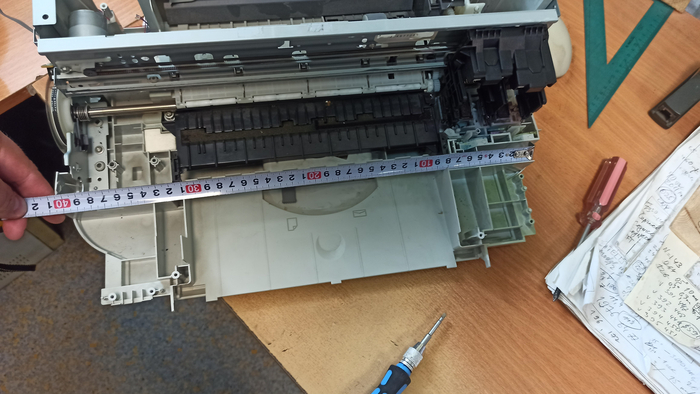
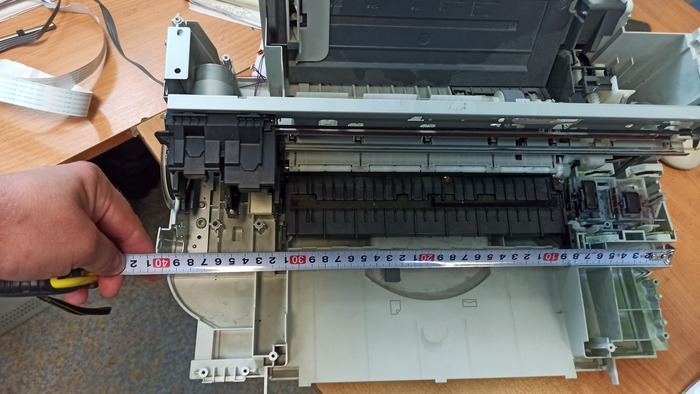
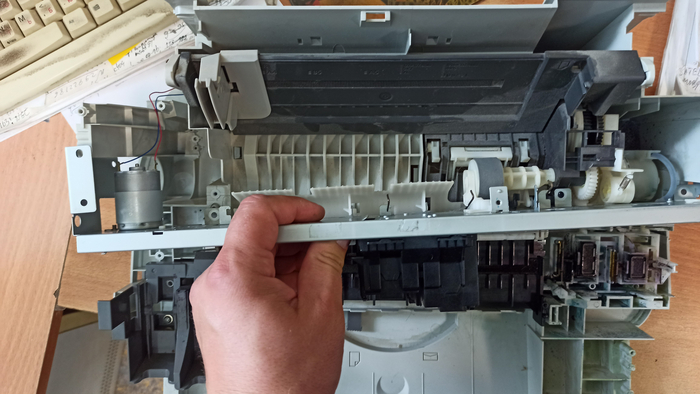
Теперь каретка печатной головки с рамой, сколько она проедет?
Ход получился около 31 см. Целое путешествие! Нужно уточнить по длине энкодерной ленты(да-да мой юный технопанк-самодельщик, существуют не только энкодерные диски, но ещё и ленты, чтобы получить линейный энкодер, а не вращающийся)
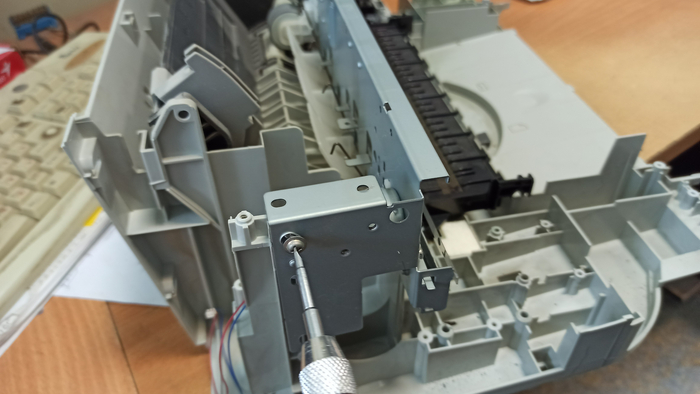
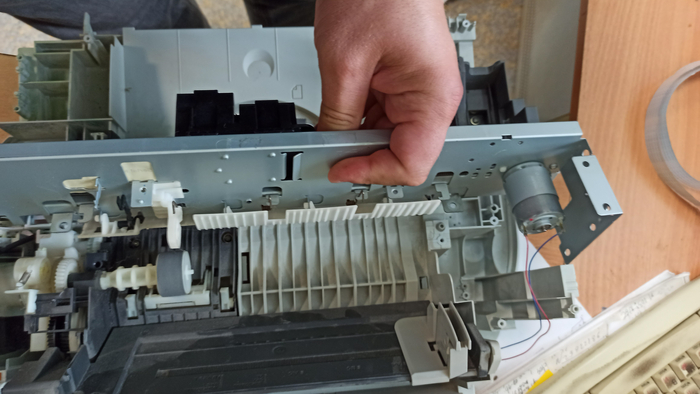
Откручиваю с каждой стороны винты, дабы наконец снять раму с кареткой
Тут судя по фото около 4-5 злючих шакалов
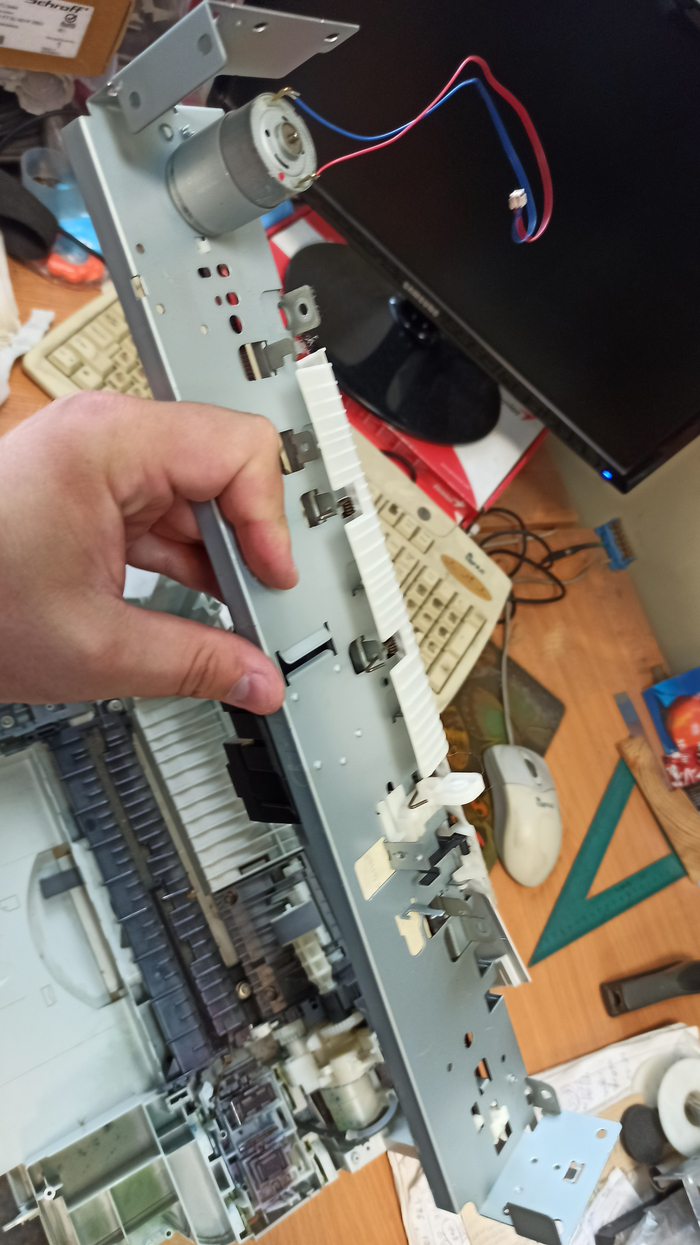
Извлекаю запчасть от будущего 3Д-принтера
Сама рама с кареткой печатающей головки имеет люфт, и перемещается с ощутимым трением, так что её логично катать на подшипниках, и с таким слабым моторчиком не факт что удастся получить высокие скорости перемещения, да и точное разрешение энкодерной ленты пока под вопросом.
Сайты про характеристики Canon Pixma MP150 пишут что у него 4800х1200 dpi. Судя по энкодерному диску, разрешение 4800 DPI соответствует бумагопротяжному механизму, а по ленте остаётся 1200 DPI. Или 1200/25.4 мм, или 47,2 шагов на миллиметр.
В принципе, можно для контроля оси Z использвать энкодерную ленту, и иметь чёткий шаг между слоями печати в 0.1 мм. А на Х и У использовать два таких диска с бумагопротяжного механизма. Одинаковое количество шагов по Х и У даст возможность использования ускорения Ramping, но это уже в следующих постах.
Итого из принтера за 150 рублей имею:
-сервопривод(мотор, ремень, ось, рамка металлическая, оптический энкодер) (600-800р?)
-2 оптических концевика (2*120р = 240р)
-1 механический концевик
-рама с кареткой печатающей головки(мотор, зубчатый ремень, энкодерная лента + энкодерный датчик в пластмассовой детали) (не знаю, но моторчик уже 300р)
-много винтиков и саморезов по пластику
-шлейфы
-ферритовые вытянутые кольца для шлейфов
-блок питания 24В 1.2 А с проводом питания и с жгутом в 3 провода с разъёмами
-крышка со сканером в котором уже готовая ось с кареткой и серво/шаговиком(предстоит выяснить)
Вывод: бу струйник довольно рентабелен