Почему супер- фирмы придумывают тысячи электроприборов когда все можно заменить одним манипулятором? Я вижу это типа рельс на потолке или навесных шкафах, которые будут и кофе готовить в турке (выкидываем кофеварку), и посуду мыть (выкидываем посудомойку), и еду готовить в простейшей посуде (мультиварки и аналогичное уходит на помойку), и алкогольные коктейли (такое вообще не реализовали еще вроде). Сами себя в раковине помоют если надо. Возможность апгрейда - бесконечна, просто пишите рецептуру каждый месяц и продавайте.
Железо в принципе несложное и наверняка есть, техобслуживание устроить можно. Но этого нет отчего то. А рынок бесконечен.
Собрал на тесты гусеничную платформу для транспортировки тяжелых грузов по сложным грунтам и сделал небольшой видео обзор.
Попробовал установить борта от прицепа на гусеничную платформу получилось сделать передний и задний съемными. Возможно это будет удобно для погрузки и разгрузки.
Гусеницу взял широкую 38 см, чтобы была хорошая проходимость по слабым грунтам. Сделал амортизирующую подвеску чтобы вибрация от неровностей дороги не передавалась на груз.
Проходимость получилась достаточно хорошая. Несмотря на малый зацеп все равно может заезжать в достаточно крутые уклоны даже по снегу.
Пока к сожалению не провели более длительные тесты на проходимость, хотелось побыстрее снять обзор и поделиться.
Провел тесты по максимальной дистанции от пульта до платформы. Проверял с пультом и приемником на ELRS сигнале. По городу днем в час пик по прямому тротуару через оживленные перекрестки получилось до 800 мм из которых 500 м уверенный сигнал без сбоев. В поле проверить пока не получилось, но предполагаю что до 1.5 км, еще будем проверять.
Тесты проводил с 4 людьми в кузове, примерно 400-450 кг, тянет без проблем. Конечно не во все подъемы заедет с таким грузом но двигается вполне уверенно.
Управляется достаточно легко, специальных навыков не нужно. Управление с одного джойстика, при этом на другие кнопки и джойстики пульта можно подключить функции навесного оборудования. Можно использовать платформу и без бортов, они съемные. Поперечные быстро снимаются, а продольные на болтовых соединениях пока сделал.
Постарался все подробно рассказать в видео обзоре. Буду благодарен адекватной конструктивной критике в комментариях.
Если есть мысли по сценариям применения также буду рад обсудить.
В нашем Promobotе на 85 % кипит отечественная кровь, понятно, что какую-то электронику и так, по мелочи, приходится доставать все-таки где-то из-за рубежа.
Над созданием роботов сейчас трудятся порядка 100 человек.
Чтобы собрать одного человекоподобного робота уходит порядка пяти дней. Здесь всегда параллельно идет работа над несколькими промоботами. В прошлом году собрали чуть больше 60 роботов. Сейчас мощности позволяют спокойно нарастить производство в два раза, будет спрос, Promobot - ответит взаимностью.
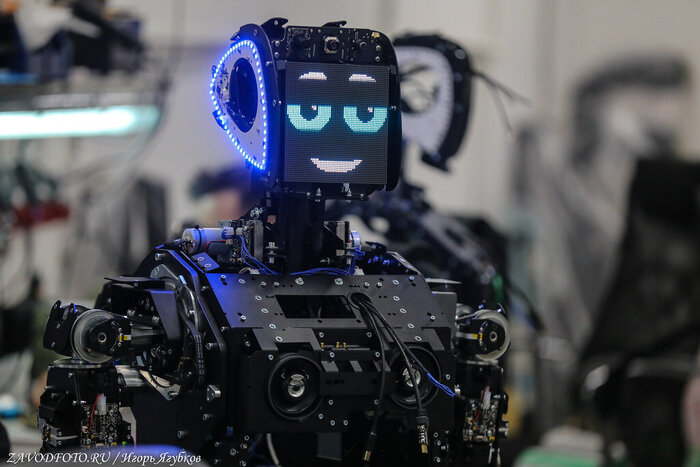
Если слева мы все с лёгкостью узнали голову Альберта Эйнштейна, выдающегося физика, то справа ему компанию составляет голова робота Дуняши с лицом жены учредителя пермского парка Горького Дианы Габдуллиной. У нас в Перми даже кибер-кафе есть, где Дуняша продает мороженое. Как вы понимаете, при желании заказчик может предложить свой вариант: с определенными чертами и цветом волос или даже собственную копию, тут подумают, и вам, скорее всего, не откажут.
Создание волосяного покрова, пожалуй, это самая долгая и кропотливая работа. Ведь всё волшебство происходит вручную. Причем каждому волоску отдельное внимание, а их на голове может быть до ста тысяч. Вся эта процедура может длиться не один день. Сами волосы только настоящие. Говорят, пробовали использовать искусственные волосы, но им не хватает изгиба и эластичности. И это ещё не всё, чтоб навести окончательный марафет, приглашают для робота самого настоящего парикмахера.
Глаза тоже разрисовываются вручную: радужная оболочка, зрачок - все прорисовывается тоненькой кисточкой. На пару глаз уходит два дня. Много времени уходит и на челюсть.
Искусственную кожу для человекоподобных роботов также создают в собственной лаборатории из специального силикона. Толщину вымеряют до долей миллиметра, обращая особое внимание на лицо, ведь мимика должна быть, как живая. Не менее важна и эластичность кожи на руках. При этом покров должен выдерживать многочисленные сгибания и разгибания.Чтобы искусственная кожа была больше похожа на настоящую её подкрашивают. По сути процесс похож на работу визажиста.
В голове каждого робота по 29 подвижных модулей, которые помогают мимике быть как можно ближе к человеческой. Именно они отвечают за движение глаз, век, щек, повороты головы.
Круглый механизм на груди робота - это камера и комплекс из нескольких микрофонов, позволяющих вычленять человеческую речь среди шумов и искать главного собеседника.
А эта модель создана на базе внешности Алексея Южакова - председателя совета директоров компании Promobot. Первую модель делали в виде слепка. И Алексею Южакову пришлось несколько часов ждать, когда нанесенная на лицо смесь затвердеет, после чего «маску» аккуратно сняли. Сейчас научились творить по более прогрессивной технологии. Достаточно сделать фото с 15-17 ракурсов, и на основе этих снимков создается полноценная 3D-модель. Готовую мастер-модель печатают на 3D-принтере.
После установки всех проводов и плат робота впервые подключают к питанию, и так, он «оживает». Каждый робот Promobot проходит более 10 часов тестов - инженеры ищут и устраняют неполадки до тех пор, пока робот не будет работать идеально. Один из последних этапов - проверка реакций и «эмоций» робота. Промобот должен уметь выделять людей в общем потоке, не путая их с мебелью или другими предметами, отличать речь человека от других звуков, отвечать на вопросы и многое другое. Понятно, что чем сложнее робот, тем больше заложено в него функций. Например, у музейных - встроены карты помещений, чтобы они прокладывали маршрут, не задевая экспонаты. У консультантов в аэропорту есть чековый принтер, у роботов в МФЦ - сканер паспорта. Роботам-диагностам по запросу могут встроить алкотестер и т.д.
Есть роботы, которые обзаводятся одеждой. Её шьют для них специально.
Батя Токарь, Я Тиктокарь. Все так и есть, наш робот-андроид Алекс на ты с соцсетями, днями сидит и ролики в Тик-ток только успевает пилить, да иностранцев удивлять. У него все по-взрослому, даже помощница своя имеется.
Правило "Мало что-то произвести, надо ещё и уметь продать" , конечно же, и здесь работает, поэтому заглянул и в отдел продаж, а он прекрасен.
А это уже Promobot Control - роботизированные терминалы учета посетителей и измерения температуры. Измеряют за 5 секунд, выдают пропуска - за 30 секунд.
А это как раз партия готовых сканеров их разработки.
Кстати, чтобы знакомить детей и будущих инженеров с инновационным отечественным производством, компания «Промобот» разработала специальный экскурсионный маршрут. Так что все желающие могут подать заявку и попасть на первую в России экскурсию, где производят человекоподобных роботов. Вон даже Путин на днях призвал предприятия активно приглашать школьников на экскурсии, а здесь уже давно этим занимаются.
Если первые модели Promobotов стоили от 300 до 600 тысяч рублей, то новые уже в районе 3 млн и выше. Promobot V.4 готов полностью заменить «живого» сотрудника. Он общается с людьми, отвечает на вопросы и консультирует, свободно передвигается в помещении. Робот даже сам встаёт на зарядку, когда понимает, что заряд на исходе. Его не нужно постоянно контролировать. Владелец робота может легко добавлять новые фразы, создавать собственные движения, эмоции и даже танцы. Управлять роботом легко - для этого не нужно специальное образование.
Большое спасибо компании Promobot за открытость и теплый прием, отдельный респект Олегу Кивокурцеву! И главное, что тогда, что сейчас мне импонирует их подход работы со СМИ, а это и Вам пример, уважаемый промышленник, хватит стесняться, приглашай к себе в гости, да побыстрей :). А команде Promobot я желаю дальнейшего роста и процветания.
Когда я думаю о влиянии интернета на обучение нейросетей, возникают опасения относительно того, какие идеи и установки могут быть переданы будущим роботам. Ведь если нейросети извлекают информацию из различных источников, то они могут подхватить и негативные тренды, такие как грубость и расизм. Например, если сеть обучается на комментариях из социальных сетей, где преобладают агрессивные высказывания, то она может начать репродуцировать подобное поведение.
Интересно большие корпорации придерживаются 3х правил робототехники написанных писателем Айзеком Азимовым:
Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
P.S. Мало кто знает но Айзек Азимов однажды добавил Нулевой Закон, сделав его более приоритетным, чем три основных. Этот закон утверждал, что робот должен действовать в интересах всего человечества, а не только отдельного человека:
0. Робот не может причинить вред человечеству или своим бездействием допустить, чтобы человечеству был причинён вред.
Более тесное взаимодействие робота и человека представляет собой положительные возможности, но также и некоторую опасность. Эксперт дает нам 3 ключевых идеи по управлению отношениями.
Каждый прожитый день приближает нас к утопической мечте о сотрудничестве человека и робота, коллаборации и сожительстве, которую много лет назад обещали нам “Джетсоны”.
Наши автомобили учатся водить сами, наши солнечные батареи поддерживают себя в чистоте, а наши пылесосы снуют по нашим домам по ночам и не дают нашим домашним животным думать, что они здесь хозяева.
Тем не менее, в этом путешествии все еще есть сбои, а именно бесконечный парад заголовков новостей, в которых фигурируют такие слова, как робот, искусственный интеллект и, конечно же, смерть и/или серьезные травмы.
Помимо этих ужасных и специфических случаев, кажется, что присутствие роботов просто более опасно, о чем свидетельствует недавнее исследование, показавшее, что на складах, использующих роботов, работники получают травмы на 50 процентов чаще.
Добавьте к этому тот факт, что сегодня утром мой Roomba попытался съесть занавеску для душа и вызвал цепную реакцию хаоса, в результате которой зубная щетка моего малыша упала в унитаз, и у нас возникла реальная проблема.
Что происходит не так?
Чтобы разобраться в сложностях и нюансах развивающейся области интеллектуальной робототехники, эксперты должны приложить все усилия, анализируя, что идет не так, выясняя почему, и предлагая решения, которые одновременно практичны и эффективны.
К счастью для гигиены полости рта моего малыша, именно этим занимается Дэвид Фейтельсон.
Подробнее об инновациях
Будучи руководителем школы разработки программного обеспечения Академического инженерного колледжа Афека в Тель-Авиве, Фейтельсон является авторитетом в области разработки программного обеспечения и взаимодействия человека и машины.
Обладая более чем тридцатилетним опытом работы, включая степень магистра Холонского технологического института и докторскую степень Оксфордского университета, его знания включают качество программного обеспечения, дизайн и искусственный интеллект .
Доктор Дэвид Фейтельсон из Академического инженерного колледжа Афека. Фото Габи Маймона
Размытые линии, сломанные шипы
В то время как в прошлом существовали очень четкие правила о том, как люди могут и должны безопасно взаимодействовать с роботами, Фейтельсон объясняет, что современные разработки размыли эту грань.
“В старые времена было совершенно ясно, что когда у вас есть машина — особенно большая, очень мощная — вы должны были установить какой-то барьер между машиной и людьми”, - говорит он.
“Интересная вещь, которая происходит сейчас, заключается в том, что мы пытаемся ослабить эти барьеры, чтобы позволить роботам и людям взаимодействовать гораздо теснее. Это открывает положительные возможности, но также представляет определенный уровень опасности”.
Он выделяет три основных препятствия, которые необходимо преодолеть, чтобы способствовать сосуществованию людей и роботов, и предлагает потенциальные решения для их преодоления.
1. Свести к минимуму вероятность новых сценариев
Одна из существенных проблем заключается в ограничениях существующих систем искусственного интеллекта, особенно тех, которые основаны на статистическом моделировании.
Фейтельсон объясняет, что часто ошибки, допускаемые роботами, управляемыми алгоритмами, являются результатом новых сценариев, выходящих за рамки обширных наборов данных машин.
Столкнувшись с незнакомой ситуацией, робот, скорее всего, сделает наилучшее предположение о том, как реагировать, что часто может привести к непредсказуемым и даже вредным результатам.
Однако, как бы мы ни старались, вероятность того, что мы сможем исключить все возможные новые сценарии, которые могут сбить наши машины с толку, невелика.
Чтобы решить эту проблему, Фейтельсон предлагает максимально упростить рабочую среду робота — будь то дорога, производственная линия или ванная комната с низко висящей занавеской для душа.
“Сделайте ее более контролируемой; более предсказуемой. Вам нужно перепроектировать всю систему, если вы хотите сделать ее безопасной, надежной и эффективной”, - говорит он.
2. Улучшите язык тела роботов
В настоящее время роботы в значительной степени просто делают то, что они планируют делать, в тот момент, когда они должны это сделать, на самом деле никому не сообщая об этом заранее.
Хотя это хорошо для повышения эффективности, это не так хорошо для случайных прохожих, находящихся в пределах досягаемости быстро движущихся стальных механизмов с сервоприводом.
Фейтельсон подчеркивает важность установления четких каналов связи между людьми и роботами, чтобы каждый знал о присутствии и намерениях другого.
Черпая вдохновение во взаимодействии человека и животных и невербальных сигналах в танце, он представляет будущее, в котором роботы прозрачно передают свои намерения, позволяя людям предвидеть и эффективно реагировать - тем самым избегая серьезных травм.
“Грузовики подают звуковой сигнал, когда они сдают назад: это предупреждение, которое говорит всем окружающим: "Я сейчас подам назад, так что отойдите". Это очень просто, но это именно то, что нужно роботам”, — отмечает Фейтельсон.
3. Научитесь лучше удалять плохой код
Есть что-то близкое к иронии в том, что люди программируют роботов, которые предназначены для того, чтобы помешать людям совершать ошибки в программировании.
Тем не менее, нам определенно нужен способ устранить эти ошибки кодирования с самого начала, прежде чем они смогут распространиться по роботизированным системам и привести к непредвиденным сбоям и потенциально опасным последствиям.
Чтобы решить эту проблему, Фейтельсон предлагает перейти к математически обоснованным методам верификации, которые могут свести к минимуму ошибки программирования и повысить надежность и безопасность роботизированных систем.
“Нам нужны математические методы, которые могут подтвердить корректность программного обеспечения, а не полагаться только на тестирование”, - говорит он. “Если вы полагаетесь только на тестирование, всегда есть вероятность, что ваши тесты пропустят один сценарий, когда система ведет себя плохо и убивает людей”.
Пока не беспокойтесь о Скайнете
В заключение Фейтельсон обращается к распространенному страху перед тем, что роботы захватят власть над человечеством, предполагая резкий разрыв между восприятием и реальностью.
“Возможно, самая большая опасность заключается в том, что нас втягивают в дискуссии об опасностях научной фантастики”, - предупреждает он.
“Поскольку люди заняты их обсуждением, они не обращают внимания на более приземленные проблемы. Но эти приземленные проблемы могут стать очень опасными, если мы будем их игнорировать”.
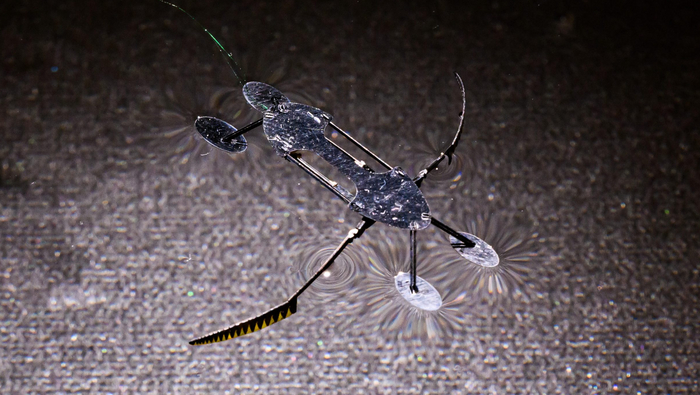
Ученые разработали двух миниатюрных, легких и быстрых роботов, представляющих собой жучка и водомерку. Эти роботы предназначены для применения в областях, таких как мониторинг окружающей среды, искусственное опыление, микропроизводство и роботизированная хирургия.
Вес мини-жучка составляет 8 мг, а вес водомерки - 55 мг. Скорость их передвижения достигает 6 мм в секунду. По словам Конора Тригстада, аспиранта Школы машиностроения и материаловедения, "это впечатляющая скорость по сравнению с другими микророботами такого размера, хотя она все еще уступает своим биологическим аналогам". Например, обычный муравей весит до 5 мг и может передвигаться со скоростью почти метр в секунду.
Роботы приводятся в движение мельчайшими приводами, произведенными с использованием новой технологии, которая позволяет уменьшить размер привода до менее чем миллиграмма. Этот привод считается самым маленьким из всех когда-либо созданных.
Нестор О. Перес-Арансибия, доцент кафедры Флаэрти в Школе машиностроения и материаловедения WSU, отмечает: "Приводы представляют собой самые маленькие и быстрые из когда-либо разработанных для микроробототехники". Используемый сплав с памятью формы, изменяющий форму при нагревании, не имеет движущихся частей, что делает его очень прочным с механической точки зрения.
Эти сплавы применяются не для крупных роботов, так как они слишком медленны, но идеально подходят для миниатюрных роботов. Ток легко нагревает и охлаждает провод, позволяя роботам двигать своими частями со скоростью до 40 раз в секунду. Предварительные испытания также показали, что привод способен поднимать вес, превышающий его собственный более чем в 150 раз.
Как отмечает Тригстад, "система SMA требует гораздо менее сложных систем для ее питания". В настоящее время исследователи работают над созданием нового типа робота, похожего на водомерку, способного передвигаться как по воде, так и под водой. Команда также разрабатывает миниатюрные батареи для обеспечения роботов независимым источником питания. Ранее стало известно, что голландский стартап Monumental создал автономного робота, способного автоматизировать строительство стен из кирпичей, что повышает эффективность и безопасность на стройплощадках.