


#ArduBlock 2.0 - Датчик линии! Робот по линии на Arduino!
Показать полностью
2
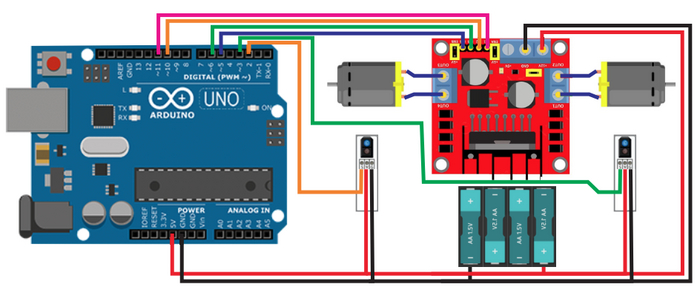
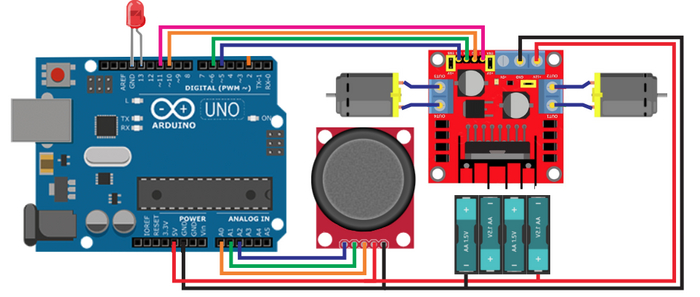
Схема:
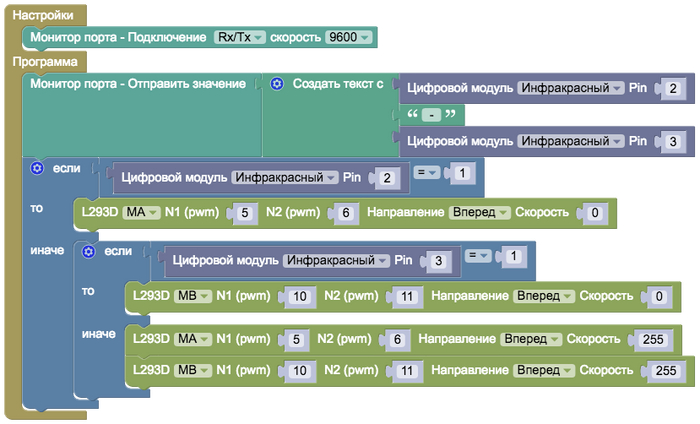
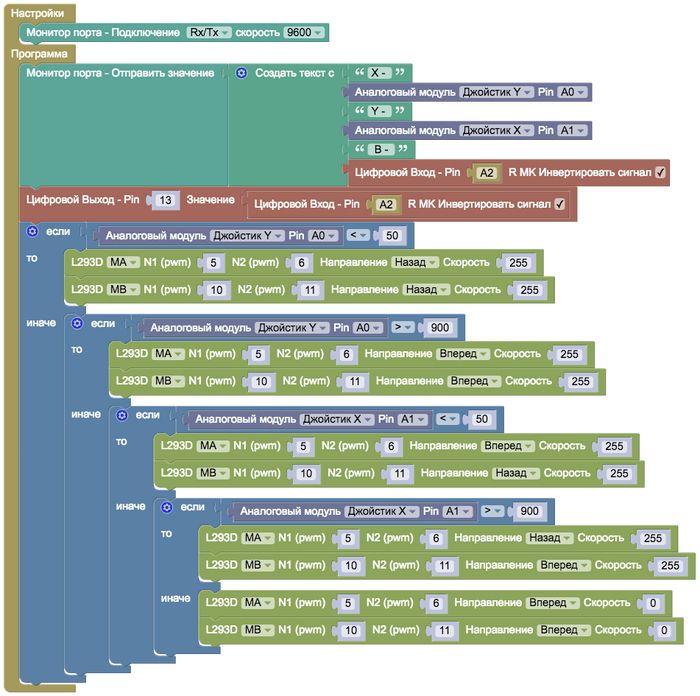
Программа:
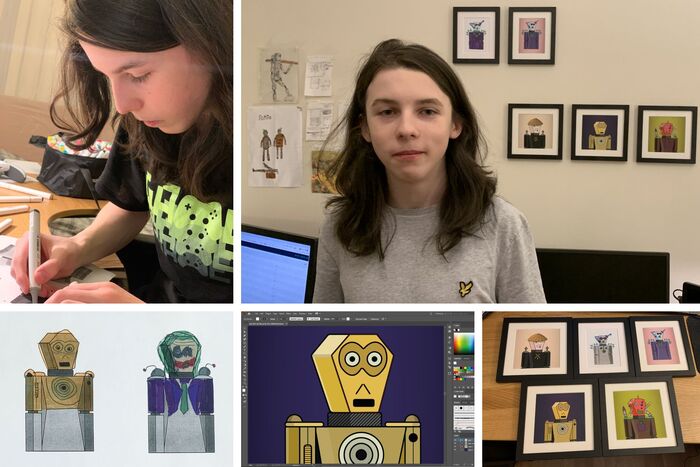
Привет, Pikabu!
Меня зовут Леонтий. Но лучше просто Лео :) С младших классов увлекаюсь программированием, робототехникой и рисованием.
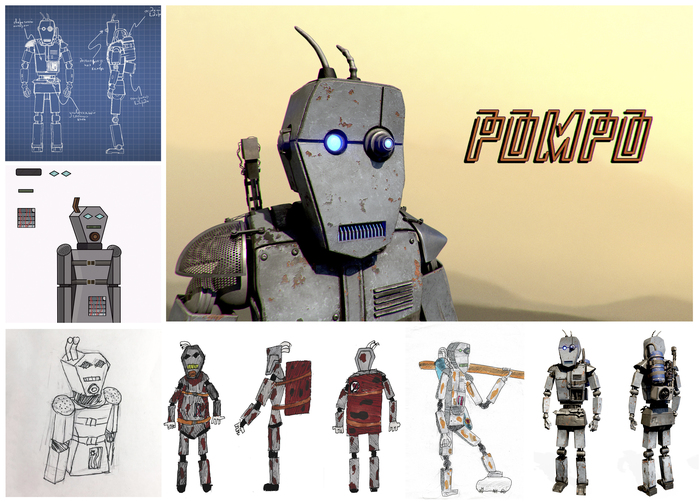
Три года назад, когда мне было 12, я придумал и нарисовал робота POMPO, выложил его на Behance и получил награду «Лучший дизайн персонажа».
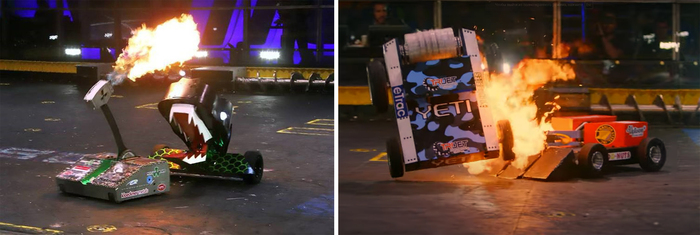
Теперь я собираюсь построить настоящего боевого робота и участвовать в шоу BattleBots. И деньги на это я намерен заработать с помощью NFT.
Расскажу о процессе создания NFT, о трудностях, о продвижении, и покажу свои расчёты. Буду рад и поддержке, и замечаниям, которые помогут мне с проектом.
Почему именно NFT?
NFT — Non-Fungible Token или невзаимозаменяемый (уникальный) токен. Простым языком, NFT — сертификат о том, что вы владелец какого-то цифрового объекта, размещенного на блокчейне: картинки, гифки, видео или музыкального трека.
За последние годы NFT стали мегапопулярными. Коллекционеры, геймеры, инвесторы и знаменитости вкладывают в них большие деньги. NFT продают на аукционах типа Sotheby’s. NFT на днях интегрируют в Instagram.
Но самое главное: многие художники и другие творческие люди привлекли инвестиции на развитие своих идей с помощью собственных NFT-проектов.
Я тоже вижу в этом отличный способ заработать на реализацию многих своих идей и развитие вселенной POMPO.
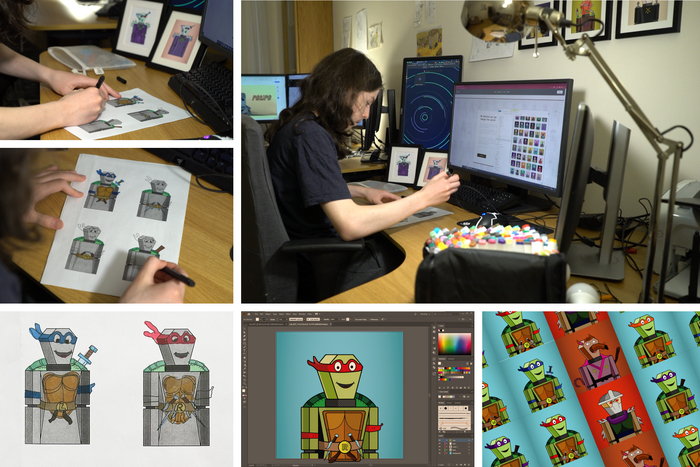
Я создал NFT-коллекцию POMPO The Robot. В ней 123 арта. Каждый из них я отрисовал вручную — сначала от руки на бумаге, потом в Illustrator и в After Effect.

Вырученные с продажи первой коллекции средства я планирую вложить:
— в запуск и продвижение второй коллекции из 5555 артов. Она будет генеративной (роботы в этой коллекции будут рандомно сгенерированы из отрисованных вручную деталей) со всяческими сложными механиками развития (здесь мы придумали кое-что революционное. Stay tuned!)
— строительство первого прототипа настоящего боевого робота для шоу BattleBots. Управлять строительством робота будет наше онлайн-сообщество через эти NFT и специально созданное DAO (децентрализованная автономная организация)
— участие в выставке Automation Trade Show и дальнейшее развитие проекта.
Поддержать мой проект и записаться в вайтлист можно на сайте POMPO. В будущем именно эти первые токены будут иметь наибольшую ценность.

С чего все начиналось
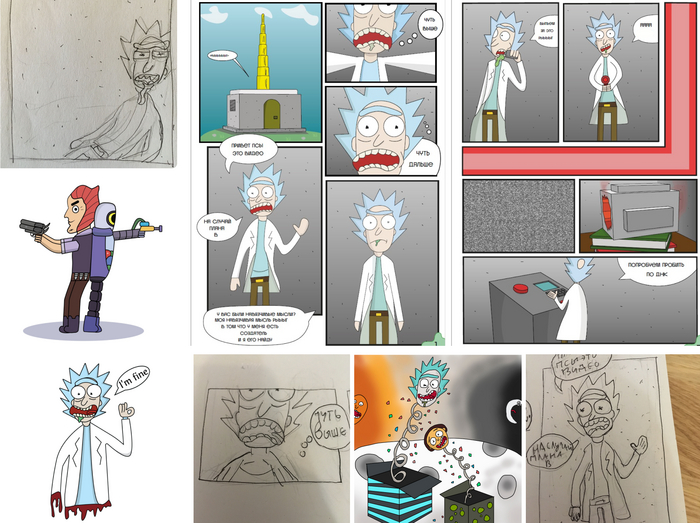
Лет с 7 я много рисую. И от руки, и на планшете.
Я очень люблю комиксы. У меня целая библиотека комиксов из разных вселенных и аниме. Также у меня есть несколько артбуков по которым я и начал учиться рисовать свои собственные комиксы. Я пробовал рисовать комиксы на разные темы, но больше всего меня увлекло рисование комиксов по вселенной Рик и Морти, это одни из моих любимых персонажей.
С 8 лет программировал: создавал простые мультики на языке Scratch. Позже начал изучать JavaScript, увлёкся веб-разработкой, сделал несколько простых проектов за деньги — можете посмотреть на моем сайте.
В 12 лет в качестве выпускного проекта в 5 классе я придумал и разработал обучающую игру “School Fire” для школьников, которая имитировала пожар в школе и в игровой форме помогала усвоить все основные правила безопасности.
А один из моих любимых фильмов — «Real Steel». Наверное, во многом из-за него ярко проявилось моё увлечение робототехникой.
С детства у меня было очень много Lego, больше 80 наборов. С 12 лет я учился строить роботов в кружке робототехники под руководством преподавателя Василия Андреевича Кропачева. Мы строили роботов на Lego Mindstorms и Arduino, а иногда даже устраивали между ними состязания. Это было любимое время в школе!
Тогда у меня и появилась задумка, которую я теперь собираюсь реализовать.
Я хочу собрать команду, разработать настоящего боевого робота и участвовать с ним в знаменитом шоу-соревновании BattleBots.
Кстати, на заметку начинающим: на базе Lego можно делать достаточно продвинутых роботов. Серия Technic позволяет без пайки собирать сложные и прочные каркасы. Для дополнительной жёсткости иногда в него можно вкручивать болты, а отверстия по всему периметру деталей позволяют делать отличный кабель-менеджмент.
Прибавьте к этому Arduino, который будет собирать данные с датчиков и raspberry pi, например, c C++ на борту, и вы получите действительно крутую связку для создания очень сложных роботов!

На видео ниже демонстрирую работу роботов, которых я собирал в классе по робототехнике. Один робот - это робот для игры в футбол, который управляется дистанционно. Второй робот передвигается самостоятельно и управляется несложным интеллектом с датчиками, которые помогают определять препятствия, по аналоги с роботами-пылесосами.
История робота POMPO
В 2019 году я сделал первые наброски робота POMPO и придумал его историю.
POMPO — многофункциональные роботы-помощники, которых люди широко использовали во время освоения Марса. Позже люди улетели домой, а POMPO остались и продолжили свою миссию: колонизировать и обустраивать планету.
А тем временем на Земле появились киборги — новое поколение роботов. Они сначала вытеснили POMPO, а потом стали бунтовать и против людей... О том, что будет дальше, можно почитать подробно на моем сайте.
В январе 2020 года я разместил POMPO на Behance и получили награду “Best Character Design” (лучший дизайн персонажа). POMPO даже попал на главную страницу.
Roadmap
В «дорожной карте» проекта я продумал, как наделить арты ценностью (Utility) для держателей NFT.
Мне очень интересно слияние физического и цифрового мира, поэтому с самых ранних этапов проекта я создаю этот мост и верю, что за этим будущее. Я придумал несколько вариантов Utility.
· Физические копии. Каждый из 123 NFT-токенов в моей первой коллекции обеспечен моей реальной, нарисованной от руки работой, которую я отправлю в любую точку мира.
· Бесплатные NFT. Каждый покупатель первой коллекции, добавившийся в вайтлист, получит два NFT из всех моих будущих коллекций!
· Участие в постройке боевого робота. Сообщество будет выбирать, из каких частей робот будет состоять, и что он будет уметь. Для этого мы сделаем свое небольшое DAO. Весь процесс сборки я буду показывать на видео.
· Розыгрыши. Я планирую проводить живые стримы, на которых буду рисовать и анимировать новых роботов по идеям комьюнити. Всех нарисованных роботов я буду разыгрывать среди своих первых покупателей.
Как я разбирался с технической частью
Знание JavaScript пригодилось. В качестве блокчейна для своего проекта я рассматривал Ethereum (ETH>BTC;)), поэтому начал учить язык Solidity, а это JS-подобный язык.
Больше всего в понимании Solidity и работы смарт-контрактов мне помогли образовательная платформа cryptozombies.io и youtube-канал Hashlips.
Именно там я нашёл базовый контракт для своей коллекции. Мне пришлось немного доработать его, но в целом он подойдёт для большинства. Если будете использовать этот контракт, имейте ввиду, что в нем можно отключить 5% комиссии автору проекта Hashlips.
Лично я поддерживаю донаты в пользу авторов, но opensource должен быть действительно open source-ом, правда? :)
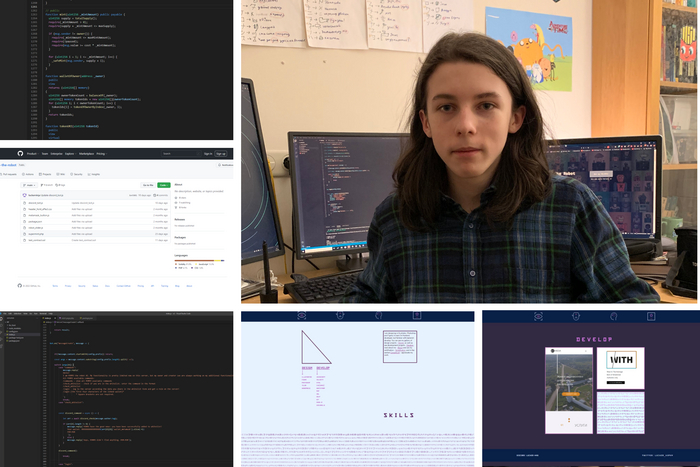
Некоторые блоки, которые я делаю для сайта сам (в том числе приложение для минта, discord-бот), я выкладываю на своем GitHub.
Как я сейчас продвигаюсь
Я долго изучал другие NFT-коллекции. Особое внимание уделял не только тем, кто у всех на слуху. Но и тем, у кого просто хорошие продажи на OpenSea.
Все, кому удавалось сделать хорошие продажи — либо везде рекламировались, либо были популярными.
У меня нет ни денег, ни репутации крутого художника. Но всё будет!)
Серьезная реклама мне пока недоступна.
Это дичь, но цена за пост + сториз в Instagram популярных NFT-пабликов доходит до $25 000
Не верите? Поглядите на одно из стандартных предложений от маркетологов, которыми вас начнут забрасывать, как только вы начнете какую-либо активность на этом поле:
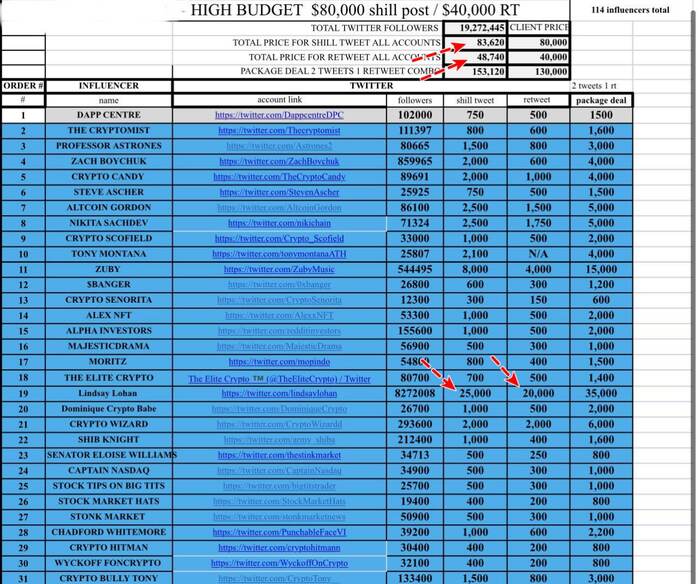
У меня нет таких денег, поэтому я делаю ставку на открытость. Со всеми, кто приходит ко мне в соцсети, общаюсь лично.
Каждый день я выделяю несколько часов на то, что хожу по различным Discord-серверам и зову всех на сервер POMPO.
Это работает! Мой Discord постепенно растёт.
В Twitter я пытаюсь напрямую достучаться до коллекционеров, у которых не пустые профили на OpenSea. Их очень много! К сожалению, отвечают они редко :( Чаще всего даже не открывают письма. Тем не менее мне удалось получить уже настоящих фанатов своей идеи, я был удивлен, но эти люди не только инвестируют свои деньги в коллекции, но и всячески помогают с продвижением!
Готовлю посты на Reddit, обращаюсь в различные СМИ. Пишу статьи, это верный способ привлечь внимание.
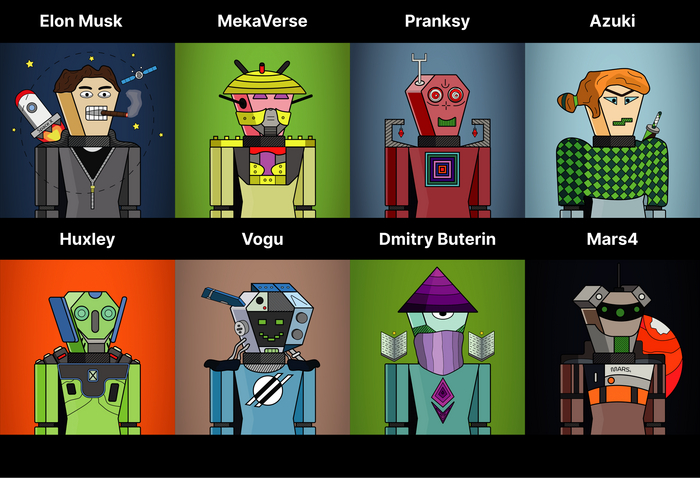
Рассчитываю на поддержку авторов известных NFT-коллекций и людей, которые меня вдохновляют и близки мне по интересам. Для этого я создал отдельную серию роботов для коллабораций, которые после релиза коллекции отправлю им в качестве подарка.
Уверен, моя тактика сработает.
Многие приходящие в Discord люди очень тепло отзываются о проекте. Им нравится идея POMPO, планы развития проекта и те ценности, которые я несу.
А еще мы с отцом провел небольшой партизанский маркетинг на Blockchain-life.
Вот так, наверное, выглядит шиллинг коллекции в реальной жизни :)
Сначала было немного страшновато, т.к. это был мой первый опыт общения на таком мероприятии, но когда я увидел заинтересованных людей, внимание, улыбки, поддержку и позитив, я понял, что я все сделал правильно. Обменялся большим количеством визиток и получил очень много эмоций и новый опыт.

Планы на будущее
Как только я продам вторую коллекцию (генеративную), я начну строить того самого боевого робота.
Это очень большая работа на месяцы труда целой команды, она включает в себя множество этапов. От проектирования цифровой версии и выбора стратегии, до тестирования прототипов в реальных условиях боя.
Плюс участие в разных тематических выставках, типа Robotics Summit & Expo. В моем обзоре на Reddit много интересных событий в мире робототехники в 2022 году.
Эта коллекция — мой первый шаг в мире Web3. В будущем я соберу команду, с которой мы будем делать новые проекты и развиваться как студия. Например, как Larva Labs — авторы коллекции CryptoPunks.
План создания боевого робота
Я уже сделал первый набросок боевого робота и выложил его во всех своих группах (впереди будет ещё много скетчей). В итоге комьюнити, а не я, будет выбирать его окончательный внешний вид и отдельные особенности. Я выделю на это большую часть бюджета, когда продам вторую, генеративную коллекцию.
Здесь я выложил очень предварительные расчеты по созданию робота и работы команды.
В какой-то момент я привлеку инвесторов и начну создание целой метавселенной POMPO MetaMars World, если к тому моменту мы не уйдем в какое-то более узкое направление. Сейчас сложно сказать, как будет развиваться индустрия, одно ясно точно — я здесь надолго, и эти NFT лишь мой первый (но очень важный!) шаг. В отличие от множества анонимных коллекций, я не скрываю свою личность, а значит планирую довести дело до конца и выполнить все обязательства.
Послесловие
Основная миссия проекта — это популяризация науки. В основе множества крутых изобретений лежит робототехника. Своим примером я хочу показать: изучать такие штуки совсем не сложно! И точно пригодится в жизни :)
Моя Большая Мечта — помочь человечеству в колонизации Марса. Когда-нибудь я создам реального робота POMPO (это у меня в планах) и, возможно, устроюсь на работу к Илону Маску.
Вся основная информация о моем проекте есть на сайте:
17 мая коллекция станет доступна тем, кто оставил заявку в Whitelist.
19 мая — старт продаж для всех.
Я сделаю все возможное, чтобы отблагодарить всех, кто меня поддержал.

Часто задаваемые вопросы вы можете прочитать в специальном разделе у меня на сайте.
Спасибо, что дочитали до конца! :)
В детстве занимался в кружках, как итог КМС по бальным танцам, шахматы, программирование, компьютерная графика, акробатика, введение в интернет технологии (2005 год), судомоделироаание, авиамоделирование.
Как результат 6 лет после школы не мог найти чем заниматься, так как умел все по чуток. Но в итоге стал оператором постановщиком
С коллегами посетила мысль создать сообщество работников и владельцев "кружов и различных секций" с техническим уклоном для обмена опытом, работы свои показать, мастерские. Принести что то новое и интересное на пикабушечку.

Пишите в комментах что интересно было бы узнать о работе таких организаций, что вообще в этом мире происходит, есть что рассказать.
будем рады.

Можем рассказать о различных форумах и мероприятиях для молодежи, что делает государство, что делают люди.

Мы за творчество и науку,

Голосом Игоря Негоды- НИТРО МЕТАН!!

Так же хотелось бы сказать спасибо!
@Diaver, @KzTcH, @K715, @Nashatirko Спасибо всем кто принимает участие в нашем развитии. Отдельное огромное спасибо производителю пластика для печати @Syntechlab .Ребят скоро буду начинать серию постов по вашим ТДМ, идет активная подготовка.
В память о Косте Танкове.

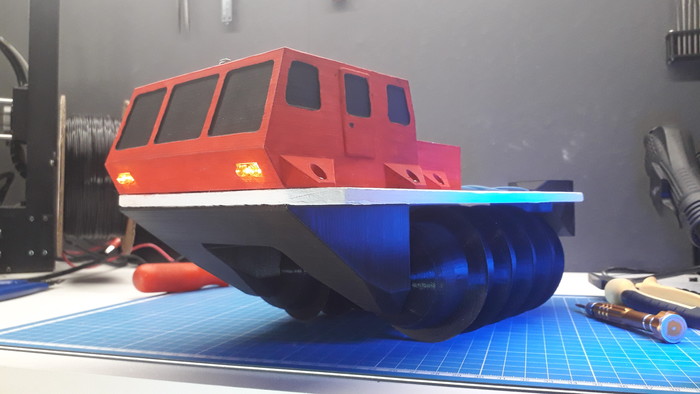
Шнекороторный снегоболотоход. Согласитесь, звучит настолько круто, что было просто необходимо попробовать это сделать. Ну, я и сделал :) Естественно, с кучей косяков из-за недостатка опыта в конструкторских делах, но все-равно получилось довольно забавно. Но обо всем по порядку.
Вообще, изначально, я был в поисках платформ для всяких зимних робототехнический проектов. Ну и вспомнил про шнековое шасси, которое давно видел одном из старых журналов. Уже не помню, в каком именно, возможно, в "Моделист-конструктор", но это не точно.
С девизом "сначала делай, потом думай" было решено приступить к сборке.
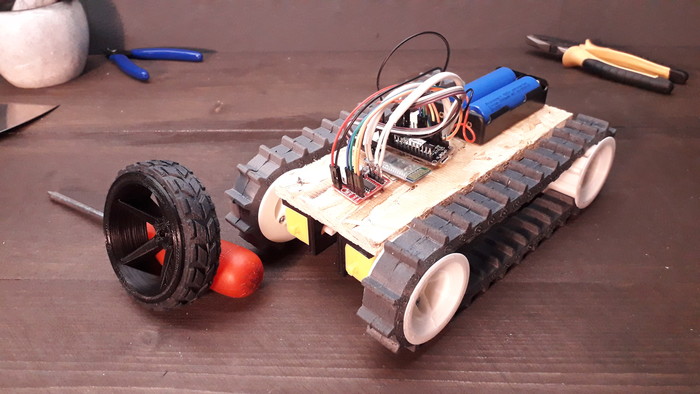
Сперва я хотел собрать, любимую мной, фанерную тележку с лапшой, просто "чтоб потестить" шнеки. Ну примерно такую же, как когда я тестировал самодельные гусеницы:
Потом же я наткнулся на фотографию шнекохода ЗИЛ-4904 и подумал, вот оно, надо брать делать. И, в итоге, по приколу, решил стилизовать тестовую тележку под модель советской техники. Тем более, сделать кабину и чуток всяких держателей и крышек не составило особых проблем. Но, в остальном, тестовая тележка остается тестовой тележкой :)
прим.: Фотографию ЗИЛ-4904 не приложу, мало ли там авторские права, все дела, но гуглится она очень просто.
Близость Новогодних праздников и руки из одного места дают о себе знать. На деле, подход экстремального прототипирования дал сбой и полезли косяки. Мои, естественно :) Хотя платформа и тестовая, и косяки просто неизбежны, но, в этот раз, их как-то слишком много:
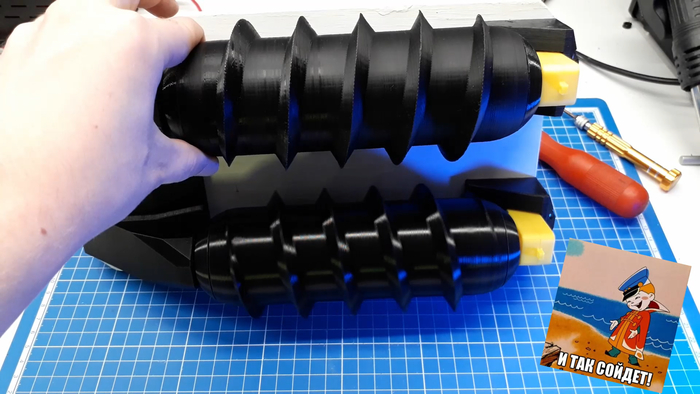
1) Вес платформы оказался намного больше, чем ожидалось, поэтому платформа в свежем снегу часто тонет и буксует. Это, в принципе, еще легко решается: путем увеличения диаметра шнеков.
2) Выбранные моторы просто катастрофически слабые. В процессе сборки, я как бы догадывался об этом, но отгонял эту мысль подальше. Т.к. других моторов у меня пока что нет, а переделывать платформу под размеры поменьше не хотелось.
3) Отказ работы li-ion аккумуляторов на морозе. Винить я их не могу, сам в такую температуру на улицу выходить не хочу -_-. Бороться с этим, вообще, пока что без понятия как. Только сейчас понял, что до этого не делал ни одного зимнего проекта. Тут даже вопрос не только по аккумуляторам, но и в целом, с температурой, т.к. моторы тоже клинило на морозе. Буду рад советам, если кто в этом шарит.
4) Ну и по мелочи: смещенный центр масс, отсутствие некоторых электронных компонентов и т.д.

В остальном, ну кроме, разве что небольшой скорости, шнекоход выглядит довольно эффектно.
И, если учесть все косяки и грабли, то платформу вполне себе можно использовать для зимних проектов.
Тем более, например, то же гусеничное шасси, как аналог для зимних проектов, сделать намного сложнее. Так чтоб оно еще и не разваливалось на ходу. Шнекороторное, на мой взгляд, понадежнее. Правда, это с учетом наличия 3d принтера и если речь о небольших тележках, для которых шнек напечатать можно. ИМХО, конечно.
Так что шасси - топ. Исполнение - шляпа. Полученный опыт - бесценен. Вам - добра.
До встречи, я надеюсь :)
Первая часть
Так, продолжаем разговор. Сегодня надо наконец собрать до кучи эту кучу пластика, и разобраться с электроникой, попутно вызвав не более трех демонов.
Напишу здесь, так как под первой частью было много недопониманий. Я не строю болид для ралли Париж-Дакар. И не для каких бы то ни было еще соревнований. И вообще ни для чего. Я инженер, но не сказать что лучший, или даже хороший. Это просто развлечение на свободное время, в стиле "а что будет, если попробовать?". Единственная цель сего мероприятия - убить время, дальнейшая судьба проекта - разбор на запчасти (возможно, с использованием молотка, для обретения душевного спокойствия) с последующей утилизацией.
Первым делом, надо разобрать все то, что так тщательно собирали в прошлый раз. Ну ладно, почти все.

Больше винтиков богу винтиков!
С одной стороны, полностью разборная конструкция дает массу преимуществ. Не так много сложных и крупных деталей, в случае поломки можно легко заменить только конкретно отзлебнувший элемент, легко править косяки и производить модификации.
Но черт возьми, как же я замаялся крутить эти чертовы 68 винтов... Да, можно было бы сделать и поменьше... Хотя я плохо представляю как.
Так как наша цель - подрамники, значит, придется скидывать рычаги, значит откроется отличный доступ к моторам...
Воспользуемся советом из комментариев, и поменяем провода питания. Я как раз нашел оригинальные от этих моторов, совершенно случайно...

Паяем провода, да покрепче, с обратной стороны зачищаем и обжимаем клеммы ншви. Просто потому что я так хочу, и никто мне не запретит. И так удобнее.
Повторяем четыре раза, затем долго и упорно закручиваем все обратно, пару раз забываем сначала собрать, а потом прикрутить амортизаторы, путем лево с право и в итоге получаем результат как в конце прошлой части, только лучше.


Едем дальше. Еще на моменте моделирования, я заложил по середине рамы монтажные отверстия, подразумевая что потом на них встанет ну хоть какое то подобие кузова, или подрамник для электроники. Получилось ни то, ни другое, просто белая пластинка с отверстиями, на глаз подогнанная под размеры будущих "мозгов".
Итак. Давайте теперь поговорим про управляющую электронику. Сейчас просьба всем хоть чуть чуть шарящим и понимающим, а так же особо чувствительным, закрыть нафиг этот пост. Я предупредил.
Чем мы можем заставить какую либо робототехническую платформу нас слушаться? Есть пара тройка вариантов. Первый, это одолжить у друга специальную аппаратуру для управления моделями, типа такой:

В теории все просто, минимум геморроя, главное все правильно подключить - и вуаля, у нас есть детская машинка на радиоуправлении. Но. Эта штука стоит денег. Для кого больших, для кого не очень, но все же стоит. У меня ее нет, покупать не хочу, а тот самый друг уже пол года как отдает долг родине... Поэтому не вариант, для нас.
Следующий вариант - экзотически-извращенский, я бы сказал. Купить в магазине самую простую машинку на радиоуправлении, распотрошить, и вставить потраха в наше поделие. Объяснять, почему так себе идея, надеюсь не надо?..
И вот, самый популярный, распространенный, и многими (в том числе и мной) любимый способ - Ардуино.
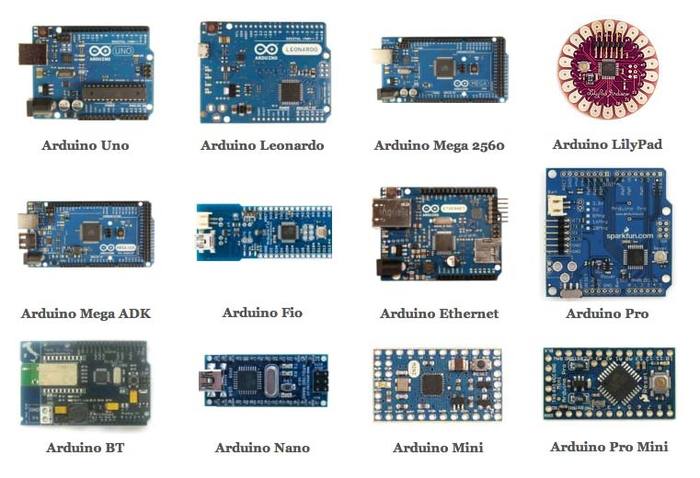
Имеем туево кукуево вариантов плат, модулей, форм факторов и тд. Даже языки программирования разные, и тут пожалуйста! И вот совпадение, у меня есть парочка.
Дальше есть два пути. Первый - обвешать модель всякими разномастными датчиками, поломать голову над кодом, и заставить все это безобразие кататься автономно, по какой нибудь черной линии, или от стенки до стенки, с помощью датчиков расстояния, или еще как. Вариантов куча. Но мне как то не интересно.
Второй путь - дистанционное управление. Можно заставить платформу кататься, подчиняясь команда с пульта телевизора, при помощи ик-приемника. Можно заморочиться с радиоканалом, и привязать к ней какой нибудь пульт от другой модели, или специально купленный на али. Можно вообще подцепить ее к домашнему роутеру, и рулить через веб интерфейс с компа. Но мы пойдем путем попроще. Или не проще, просто тем, адептом которого являюсь я. Старый добрый Bluetooth. Скачиваем на мобилку какое н будь приложение для управления машинками, я пользуюсь этим уже давно, и меня все устраивает.
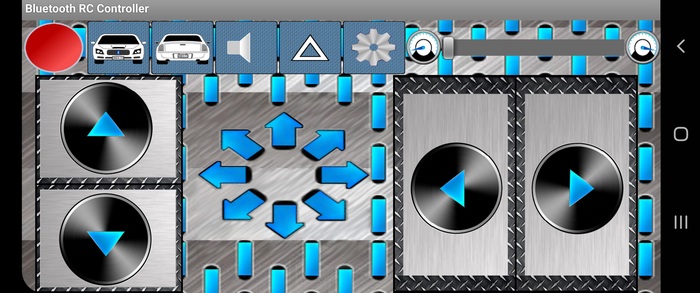
Открываем список команд, изобретаем код на 400 строчек, заливаем в нашу ардуйню, катаемся. Теперь непосредственно по железу...
Я пользую версию Arduino Leonardo от одной московской фирмы...

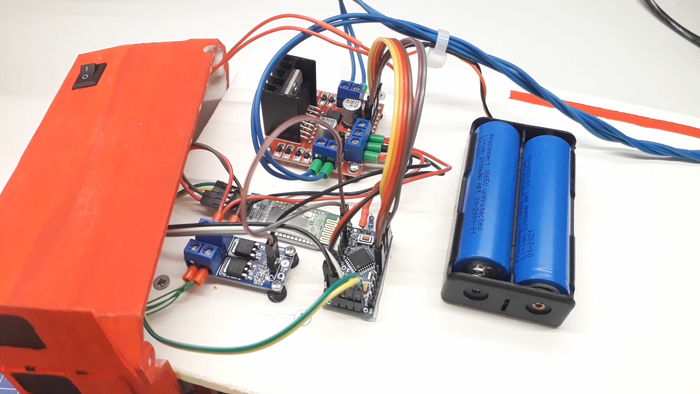
Уж не знаю что там по качеству, меня пока все устраивает, особенно улучшенная силовая часть, по сравнению с оригиналом. Сама по себе платка не потянет управление моторами, тупо сгорит. У все той же московской фирмы есть двухканальный драйвер моторов.
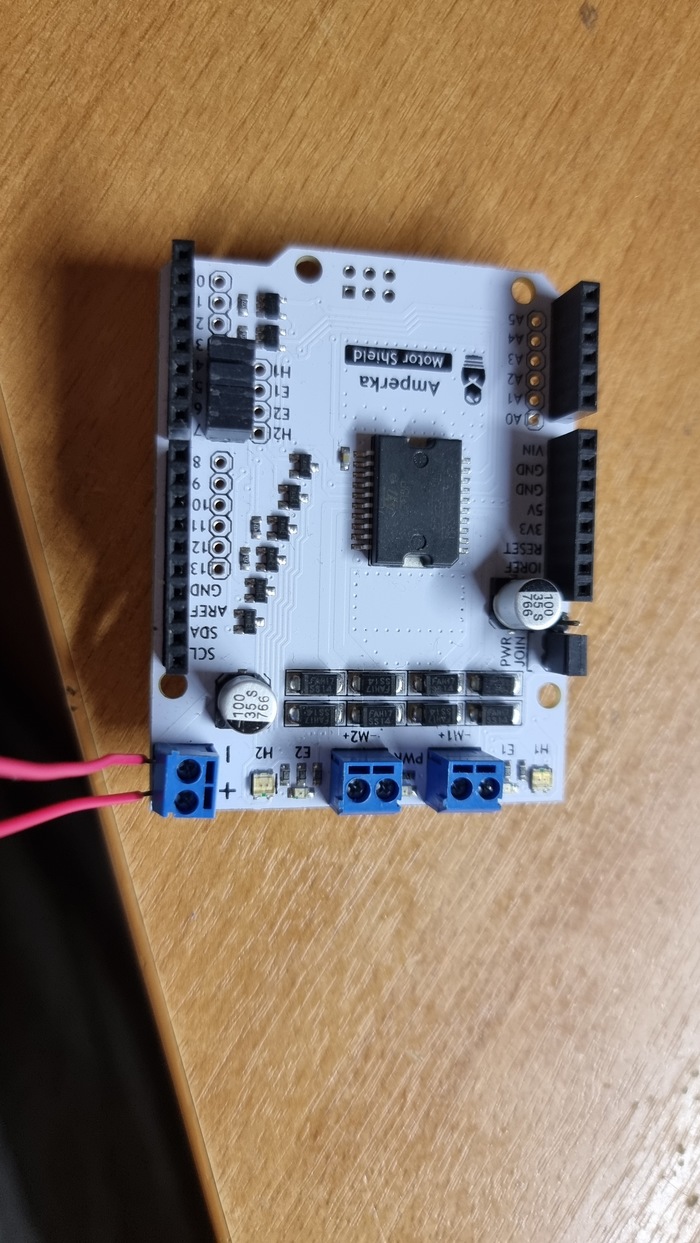
Она же позволит осуществить внешние питание всего и вся в нашей сборке.
А так же, для удобство монтажа всякой навесухи, да и вообще, докидываем плату расширения.
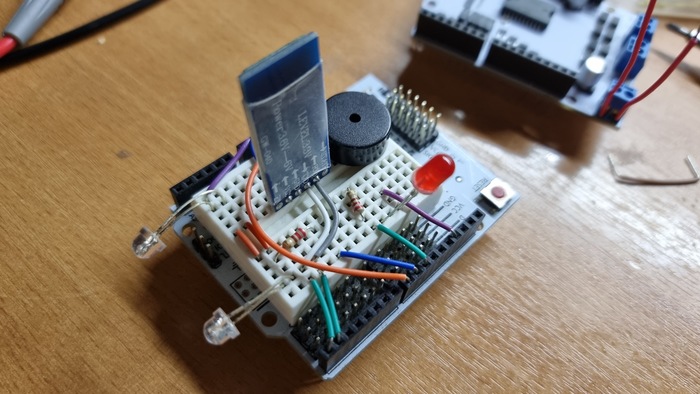
Из дополнительно прилепленного - пара светодиодных фар в стиле "улитка наркоман", красная лампочка, чтобы судорожно моргать в случае проблем, зуммер, чтобы делать бип бип, и модуль Bluetooth hc-06.
на всякий случай проклеим низ первой платы изолентой, все таки контакт с шестью металлическими винтами, мало ли...
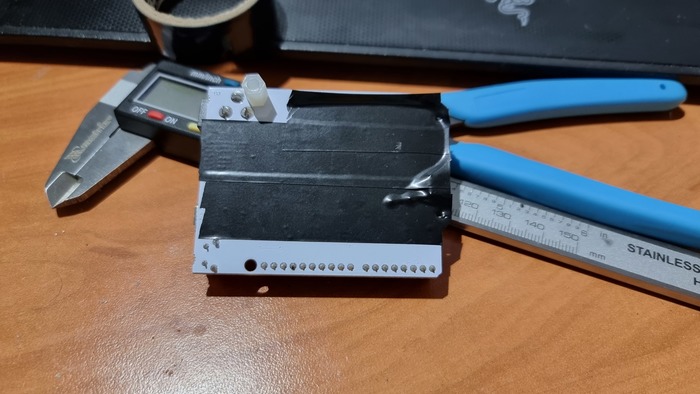
Все это дело собирается "бутербродом" друг на друга, поэтому сначала закрепляем основную плату на раме, затем на нее драйвер моторов и тд.
Драйвер у нас двухканальный, а мотора четыре... Ну ничего, просто объединяем по два на канал, все равно при танковой схеме разницы нет. По идее так делать нельзя, но кто мне запретит. Да и нагрузки я проверил, должно выдержать. Должно.
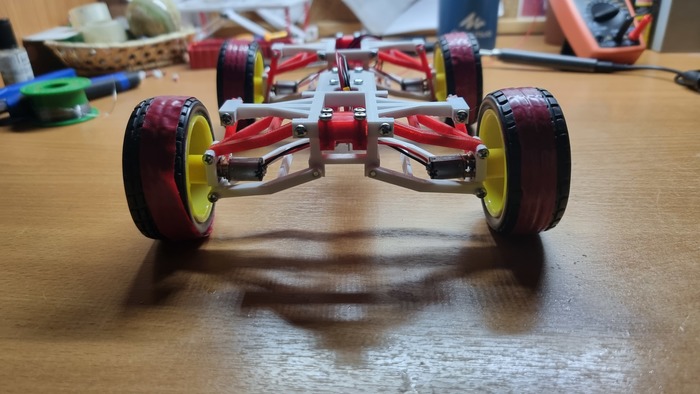
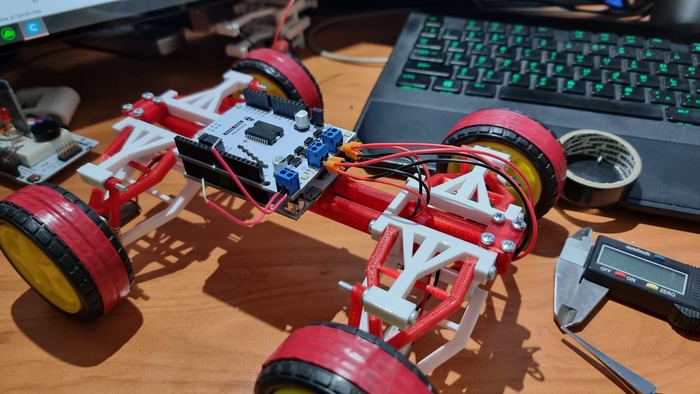
В общем, собираем, распутываем паутину проводов, находим косяк с креплением аккумуляторов (ну подумаешь, забыл, из нее де не стрелять...) и в итоге получаем вот такое чудо юдо:

Иии... Да. Оно работает. Даже ездит. И даже по искусственному рельефу из коробок прыгает, и подвеска вроде как отрабатывает, но... Оно не работает) Точнее работает, но с кучей очень больших но... И это все мои ошибки. Просчеты, неучеты, нехватка опыта. Бегло пройдемся по ним:
- крепление аккумулятора, его просто нет. Надо удлинять раму, чтобы раздвинуть подрамники и закрепить его за блоком электроники, чтобы не мешался, и центр тяжести был ниже.
- я где то накосячил, не то в моделировании, не то в печати деталей, но в итоге что то не то с длиной рычагов подвески, и в итоге у нас получается отрицательный угол схождения колес, из за чего большая нагрузка на приводящие валы. Нужны новые рычаги.
- на хорошем рельефе начинают разбалтываться моторы, возможно из за проблемы выше, но все таки я пришел к выводу, что нужны крепления.
- нужны другие колеса, вероятно печатные. Эти слишком тяжелые, и нет возможности нормально закрепиться на валу.
- телескопы подвески работают, но явно как то не так. Надо либо поколдовать с их длиной, но скорее всего проблема в так себе качестве поверхности для трущихся деталей, видимо надо печатать в плюс, и шлифовать.
Из очевидных проблем это вроде пока все. Не знаю, буду ли я это исправлять, или сверну проект... Зависит от настроения. Так же не знаю, буду ли выкладывать сюда дальнейшую судьбу этого поделия, посмотрим на вашу реакцию. Ну а пока мы встаем на импровизированный пит-стоп)

Учавствовал в роботизации инсталляции «квантологосы». Работал над простой штукой — подходит человек к микроскопу, а он «встает».
Замучался со срабатыванием. То датчик быстро схватывал, то в другие дни — еле срабатывал. Обнаружил, что на это влияла моя одежда. Начал копать суть. Физика оказалась проста.
Светлый цвет в отличии от темного активнее отражает свет, что и характеризует его. Т.е. темный цвет активнее поглощает лучи ик-датчика, тем самым меняя дальность срабатывания.








