Модель российского производства отличается повышенным уровнем комфорта и новой планировкой салона.
Несколько интересных фактов:
🔹 Вместимость — до 77 человек.
🔹 10 кв. м — самая большая площадь низкого пола в классе.
🔹 2 широкие двери позволяют пассажирам заходить и выходить быстрее.
🔹 Сиденья и поручни прикреплены к боковой части кузова и не мешают передвижению по салону.
🔹 Накопительная площадка оборудована местами для маломобильных граждан.
Тестирование новейшего автобуса среднего класса продлится в течение нескольких месяцев. По итогам испытаний рассмотрим закупку машины для запуска на пригородные маршруты Подмосковья.
Учитывая то что сайты для обеспечения их работы содержат кучу полезных вещей, как думают владельцы, на самом деле эти вещи в нынешних условиях приводят к полному отказу загрузки страниц этих сайтов, причем одни не работают по причине блокировок внутри страны, другие из за западных санкций, когда тригером становится местный айпи, вычищайте с сайтов все эти метрики, инструменты проверок итд, вы не сможете с ними обеспечить должную работу сайта, у одних будет не работать одно, у других другое.
На презентации новый гуманоидный робот IRON настолько поразил публику, что многие реально подумали: «А там точно не человек внутри?» Движения оказались настолько живыми и естественными, что XPeng пришлось выкладывать видео‑доказательства - мол, это действительно машина. Даже CNN отметили: «Грань между человеком и машиной получила серьёзный удар».
И это не просто шоу. Компания обещает запустить массовое производство уже в 2026 году. Причём добавили четвёртый «закон робототехники»: IRON никогда не будет разглашать личную жизнь человека. Звучит как минимум интригующе.
🔥 Почему специалисты считают, что у Iron есть шанс стать лидером в гонке андроидов:
82 степени свободы - это выше среднего по рынку. Только кисть имеет 22 степени свободы и миниатюрные гармоничные приводы, идентичные человеческой руке в масштабе 1:1. Робот может аккуратно взять яйцо или открутить крышку.
Мозг на трёх ИИ‑чипах Turing с мощностью 2250 TOPS - рекорд среди гуманоидов. Впервые используется крупная модель физического мира (VLT + VLA + VLM), которая позволяет вести диалог и управлять движениями на новом уровне.
Твердотельные батареи - впервые полностью применены в роботе. Это даёт +30% к запасу энергии и -30% к весу. XPeng планирует именно с этого сегмента начать массовое производство таких батарей.
RON - это не просто «робот для презентации». Это заявка на будущее, где андроиды будут не только выглядеть как люди, но и действовать почти так же. Китайцы явно настроены серьёзно, и если всё пойдёт по плану, в 2026 году мы можем увидеть первую волну массовых «железных помощников».
Мои мысли на этот счёт: Закупим производство этих роботов в Китае. И прилепим логотип с названием: ЯндексМэн
Пока китайская технология впечатляет роботом гуманоидом XPENG Iron, который уже движется почти как человек. Россия столкнулась с проблемами с AIDOL, который даже споткнулся и упал во время презентации. Контраст между двумя роботами показал разницу в уровне развития проектов...
XPENG Iron: интересный факт из презентации:
Из-за того что публика не поверила что это действительно робот. Инженеры прям на сцене разрезали ткань на ноге робота. (Что бы были видны прИводы и рама робота)
Без нагрузочного тестирования, максимально приближенного к продуктивной среде, любые выводы об эффективности индексов остаются лишь предположениями.
Приготовьтесь пересмотреть свои взгляды на оптимизацию PostgreSQL и научиться доверять сигналам, которые подает вам СУБД.
ℹ️ Новый инструмент с открытым исходным кодом для статистического анализа, нагрузочного тестирования и построения отчетов доступен в репозитории GitFlic и GitHub
В PostgreSQL нет специфических wait events, которые прямо указывают на ненужность индекса, но следующие признаки в планах выполнения и статистике могут сигнализировать о проблеме:
1. Высокая стоимость обслуживания индекса
Wait Events, связанные с записью на диск (например, WALWrite, BgWriterHibernate), могут участиться из-за частых обновлений индекса при INSERT/UPDATE/DELETE.
В планах DML-запросов значительные затраты на Index Updates (строки -> Index Insert, -> Index Delete).
2. Низкая эффективность индекса
Bitmap Index Scan с последующим Bitmap Heap Scan:
Если Rows Removed by Index Recheck велико, индекс неточно фильтрует данные.
Высокое значение Heap Blocks Fetched указывает на много случайных чтений.
Index Scan с большим Actual Loops и высоким Cost по сравнению с Seq Scan.
3. Избыточность индекса
Если индекс используется, но в плане появляется Sort или Group, хотя индекс должен обеспечивать порядок (например, для ORDER BY). Это может означать неоптимальность порядка колонок в индексе.
Наличие нескольких индексов с пересекающимися колонками, где один индекс заменяет другой.
4. Статистика использования
Запрос к pg_stat_user_indexes показывает низкое значение idx_scan при высоких idx_tup_read и idx_tup_fetch — индекс читает много строк, но редко используется.
5. Размер индекса
Индекс занимает больше места, чем сама таблица (pg_relation_size), и не дает преимуществ в производительности.
Примеры неэффективных индексов:
Индексы на колонки с малым количеством уникальных значений (например, boolean).
Частичные индексы с избыточными условиями.
Индексы, дублирующие функциональность других индексов.
ℹ️Конкретные признаки в планах выполнения и wait events, указывающие на неэффективность индекса по сравнению с Seq Scan:
1. Высокий процент отфильтрованных строк
-- Если индекс отбирает >5-10% таблицы, он часто проигрывает Seq Scan
Index Scan using idx_name on table (cost=0.43..1254.32 rows=50000 width=8)
Index Cond: (status = 'active')
-- rows=50000 при общем размере таблицы 100000 строк = 50% - слишком много для индекса
2. Большое количество Heap Fetches
Bitmap Heap Scan on orders (cost=184.55..17524.82 rows=8822 width=45)
Recheck Cond: (customer_id = 123)
Heap Blocks: exact=4200 -- Слишком много блоков таблицы прочитано
-> Bitmap Index Scan on idx_orders_customer_id
3. Низкая селективность в Bitmap Index Scan
Bitmap Index Scan on idx_low_selectivity (cost=0.00..1123.45 rows=80000 width=0)
Index Cond: (flag = true) -- Индекс на boolean поле обычно неэффективен
Количественные показатели неэффективности:
1. Сравнение стоимости в плане
-- Плохой случай: индекс дороже последовательного сканирования
Как человек не только любопытный, но и меркантильный исключительно во благо науки и общества, я рассчитывала на выставке не только посмотреть, но и награбить ништяков и побольше что будут раздавать что-нибудь приятное. Как говорится - не выпрашивать, но принимать с выражением исключительного благородства на челе. В результате всё дОбытое пришлось отправить домой посылкой, так как авиакомпания Победа не позволяет выдать приличных размеров коробку за ручную кладь. Теперь настало время не только рассматривать, но и писать о хабаре.
Самое простое - это писать о том, что можно сожратьупотреблять съедобное. Для экспериментов я человек максимально удобный - чувствительность средняя, любопытство в наличии, здоровье по вердикту врачей "пахать на ней не только можно, но и нужно" (КРБС не считово) и аллергиями не страдаю.
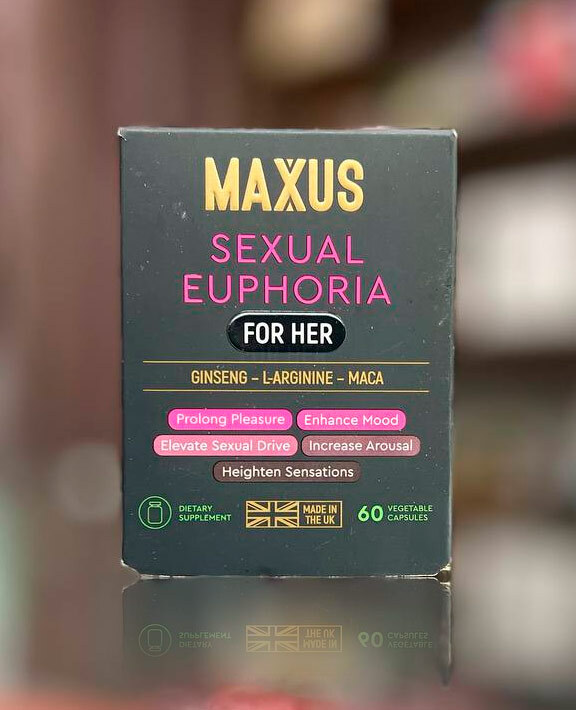
Первое, что решено было рассмотреть, это БАД для женщин, от небезызвестного бренда Maxus. Употреблять его предлагается курсом и обещают либидо, которое повысится, хотя я и так не жаловалась. Более яркие ощущения и бонусом улучшение настроения.
Коробочка, но она слегка пошорканная, потому что добиралась домой как попало. Коробочка, как коробочка.
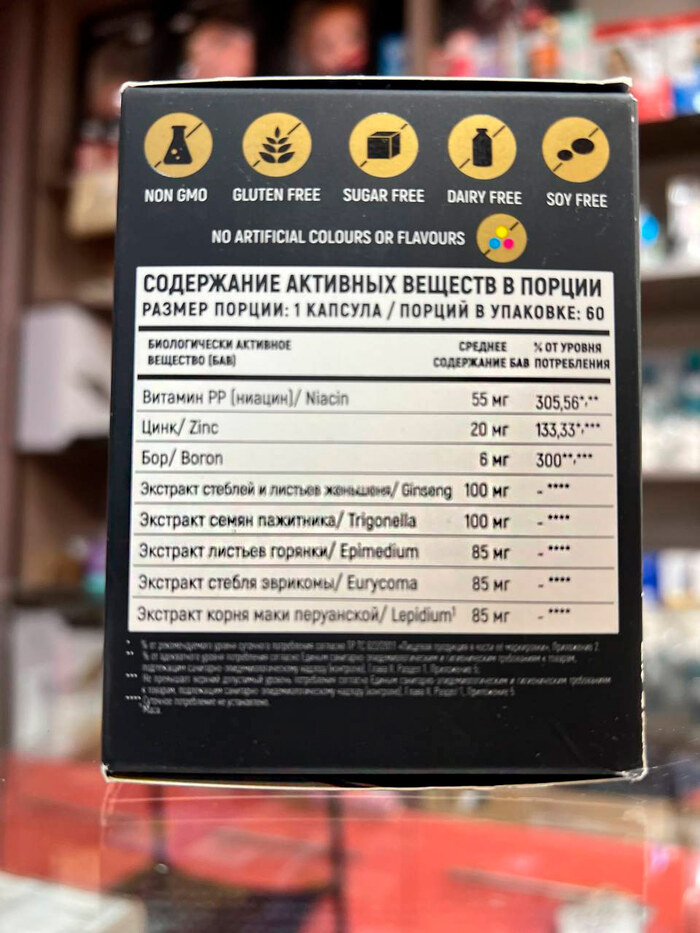
Состав на боку коробки, как бы всё привычно для БАДов из секс-шопа. Витаминки всякие я уважаю, женьшень в жизни тоже не лишний, остальное призвано положительно влиять на женскую сексуальную активность. Впрочем, как и на мужскую.
Экстракт семян пажитника — это растительная добавка, которую используют для улучшения мужского и женского здоровья, поддержки метаболизма, укрепления иммунитета и как тонизирующее средство.
Экстракт листьев горянки — это биологически активная добавка, известная своим положительным влиянием на либидо и потенцию благодаря содержанию икариина.
Экстракт стебля эврикомы — это растительная добавка, известная своей способностью повышать уровень тестостерона, улучшать либидо, выносливость и мышечную массу.
Экстракт корня маки перуанской — это натуральное средство, которое традиционно используется для повышения энергии и выносливости, улучшения сексуальной функции, нормализации гормонального фона и снижения стресса.
Открываем. Внутри банка, которая очень похожа на банку с презервативами от Maxus. Фон коробки внутри как бы намекает на ждущий нас космос.
Банка с 60 пилюлями, употреблять предлагается по 2 штуки, один раз в день, во время еды и с утра. Тут понятно, чтобы не взбодриться к ночи от женьшеня и пажитника.
Горлышко заклеено защитной мембраной.
Внутри пилюльки цвета осенней пожухшей травы, пахнет травами с кислинкой. Запах какой-то знакомый, но опознать не удалось.
Начинаем употреблять тестировать на лисах, прежде чем перейти к опытам на людях. Как и предписано - 2 пилюльки в день, с утра. Для полной чистоты эксперимента добавим то, что я иногда про них забывала. Или забывала про еду, а про капсулы отлично помнила. В таком режиме тестирование шло около двух недель, а выводы получились такие:
Первое, что однозначно понравилось - это тонизирующий эффект. Меня лично пилюльки бодрили отлично и в первый день я сильно удивилась тому, что энергии прибавилось.
Второе - на мне эффект повышения либидо отработал отлично. Вот он приходит не сразу, а где-то через неделю и внезапно ловишь себя на мысли, что "эх, сейчас бы мужичка задорного". Это я утрирую, конечно, но интерес в сторону секса становится гораздо более интенсивным, появляется томное настроение и желание флиртовать.
Добавлю, что если женщина замотана работой, устала, или объект ей не интересен - то пилюльками можно кормить сколько угодно, она будет хотеть отдохнуть и другой объект.
Минусов для меня оказалось тоже два:
Первый минус - появились сложности с засыпанием, что может быть естественным при употреблении тонизирующих добавок. Но мне не понравилось, потому что фигня получается - вечером не заснёшь, утром не высыпаешься, а чтобы взбодриться опять жрёшь пилюльки.
Второй, самый жирный для меня минус - простите за прозу, но меня начало тошнить с первого же дня и тогда я списала всё на духоту в автобусе, помноженную на давку. Плюс погрешности в питании. Потом слегка подташнивало каждый день и лишь иногда отпускало. Сначала появилось опасение, что это всё, теперь ждёт интересная жизнь с глотанием кишки и лечением у гастроэнтеролога. Но тошнота отпускала именно в те дни, когда я забывала принять капсулы.
Второй минус для меня оказался решающим, потому что мне так не нравится. Вероятно, это была моя личная индивидуальная реакция на капсулы и не будь её, я бы наставила им дофига плюсов. Но сейчас я эксперимент бросаю.
В общем, капсулы работающие и очень интересные, но с нюансами.