Пробы ставить практически негде, ниже приведены таймкоды фейлов с описаниями, которые система успела совершить за короткое видео. Отдельные фрагменты видео ускорены, судя по показаниям планшета, общее время поездки - около получаса. Символом (x) после таймкодов обозначено отключение FSD водителем или системой. Также водитель может "помочь" FSD, нажав на go-педаль в случае если авто встало. Такие случаи отмечены как (go)
0:42 (x) Левый поворот из положения "между полосами". Водитель перестроил в нужную полосу.
1:15 (x) Судя по описанию водителя - попытка перестроиться вправо на пешеходном переходе с пешеходами.
1:47 (х) Перестроение через сплошные линии.
2:05 (х) FSD отключился сам на повороте.
2:15, 3:13 Ничего особенного на общем фоне. Остановка после левого поворота без причины и паника по поводу авто в соседнем ряду.
3:48 Ожидание полного отсутствия авто в зоне видимости для поворота налево. Можно было бы списать на консервативность, если бы не опасное поведение дальше по видео.
4:23 Водитель жалуется на поворот направо по широкой дуге с заездом на не свою полосу. Ок на общем фоне, ИМХО.
5:02 Объезжает велосипедистов так широко, что практически цепляет встречный автомобиль.
5:37 (go) Остановка посреди перекрестка без причины. Включение поворотников при продолжении прямого движения.
6:08 Опасный левый поворот на нерегулируемом перекрестке. Маневр совершался так медленно, что авто слева притормозило, чтобы избежать боковое столкновение.
6:46 (х) FSD отключился сам на повороте. Интересный пример ограниченности камер без LIDAR при отсутствии четкой видимости (несколько стволов деревьев)
7:09 (x) В Штатах можно поворачивать направо на красный после полной остановки. Если не висит знак No Turn on Red. Знак висел, система его не распознала и попыталась повернуть с нарушением.
7:26 (x) Сигнал "Take Over Immediately" с остановкой. Причина не ясна.
8:09 (x) Перестроение в полосу для поворота налево тогда как нужно двигаться прямо (еще и поворотники зачем-то были включены). После проезда перекрестка, авто просто встало за припаркованными слева авто.
8:41 Объезд припаркованного фургона. Все хорошо.
9:39 (x) Водитель увернулся от наезда колесом на бордюр при повороте.
10:04 (go) Неуверенное управление.
10:39 (х) !! выезд на встречку. Довольно показательный момент ограниченности FSD без использования карт. FSD отключился, сигнал я не услышал.
10:49 (х) Ожидаем, когда прикаркованное на аварийке авто поедет.
11:13 (go) Ожидание на перекрестке при наличии приоритета.
11:36 (go) Остановка на нерегулируемом перекрестке при отсутствии знака STOP
11:59 !! Опасный проезд, близкий к столновению справа.
12:20 (x) !! Почти сразу же, уворот от столкновения.
12:42 (x) Авто пыталось въехать в стену. Здесь не уверен, что реакция водителя не преждевременная, но с учетом того, что тесла пыталась дважды самоубиться несколько секунд назад, полностью его понимаю.
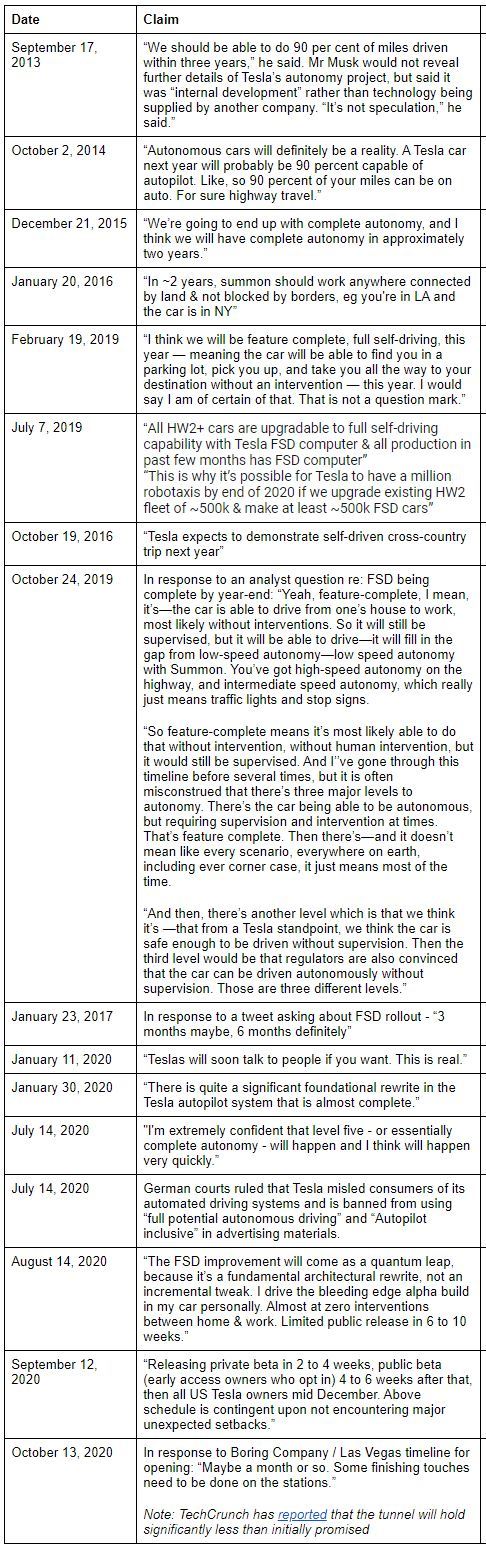
C 2013 года Маск утверждает, что автономия и роботакси вот-вот будут готовы. (см. простыню цитат в конце). FSD на авто приобретается опционально за $10k и продается с 2016 года. При смене теслы на новую, FSD нужно покупать заново.
Часто от любителей теслы можно услышать, что FSD безопаснее среднего таксиста и что проблема только в получении разрешений, но это не так. Во-первых потому, что средний таксист по городу водит несравнимо лучше, чем тесла на приведенном видео, во-вторых, потому, что никаких юридических препятствий для роботакси в штатах нет. В Калифорнии нужно просто предоставить данные и тесты в Дептранспорта (DMV). Для этого нужно посадить водителей в теслы и накатать нужное число миль на FSD, предоставив данные об отключениях системы.
Между тем, усилия других компаний сосредоточены на построении систем с картами высокого разрешения и LiDAR. Такое решение видится наиболее жизнеспособным для автономии, несмотря на дороговизну (LiDARы дешевеют) и на изначальную ограниченность области применения, т.к. помимо простого зрения для вождения важен контекст локации и одной нейросетью не добиться снижения "угловых случаев" до приемлемого уровня не получится. Приемлемым можно считать один отказ системы на тысячи миль при обеспечении безопасности пассажира в случае отключения. На видео я насчитал 13 отказов за поездку и несколько опасных моментов. Даже при наличии удаленных операторов на случай отказа и снижении числа отказов в 100 раз, аварий будет много.
Понятно, что это называется бета-версией, но разрабатывается она самое позднее с 2016го, а кривые обучения моделей машинного обучения имеют свойство быстро выходить на плато. Грубо говоря, если после 5 лет разработки отказов больше одного на среднюю поездку, то понизить количество отказов в 2 раза займет усилий сопоставимо затраченными, т.к. необходимо отслеживать уйму редких угловых случаев. Это подтверждается тем, что в корреспонденции с Дептранспортом Тесла признает FSD "помощником водителя" и "не ожидает значимых улучшений в системе, которые бы позволили снять водительский контроль" (пруф). DMV обязаны предоставлять корреспонденцию по закону FOIA, чем и воспользовались скептики. Это как-то уж очень сильно расходится с обещаниями "технокороля".
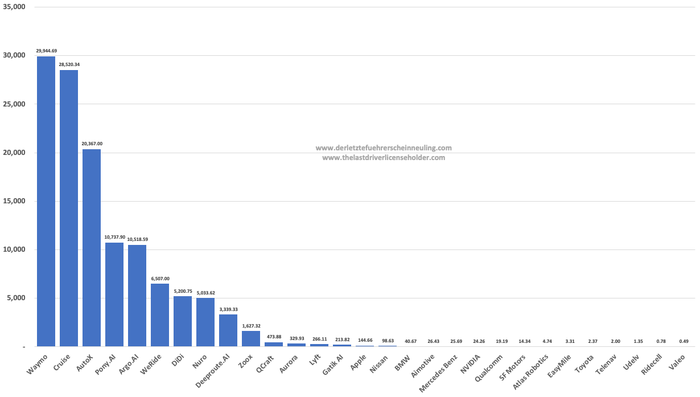
Что же у конкурентов? У Waymo в настоящий момент запущен сервис роботакси в аризоне и вовсю идет тестирование в Сан Франциско. GM Сruise также тестирует свое решение в Калифорнии. Количество миль на один отказ системы при тестировании настоящих компаний роботакси в Калифорнии представлено ниже (более детальные данные тут). Тесла таких данных не предоставляет, хотя возможностей нанять водителей у самой крупной в мире автокомпании по капитализации должно быть много.
- Можете ли Вы сказать, что Ваша технология на порядки более продвинутая чем у крикливого конкурента с вводящим в заблуждение маркетингом?
- Да
Обещанная простыня цитат Маска с обещаниями.