





Kerbal space program - Запуск спутника на орбиту луны (A1)
Добрый всем день! Меня зовут Finn163 и когда-то давно (2012 г. с версии 0.17) я люто играл и стримил Kerbal Space Program и активно общался на тематическом форуме, но в связи, что форум уже довольно непопулярный, и люди там общаются неактивно, я решил немножко попоститься здесь.
К моему счастью, люди до сих пор случайно наталкиваются на такой замечательный проект Kerbal Space Program и за кратчайшие сроки понимают теорию космических перелётов лучше чем за годы обучения в институте, по многим причинам, но в данном посте не об этом.
Собственно, я надеюсь, что все не игравшие к этому приобщаться, а игравшие найдут что-то полезное и интересное в моих постах. Я не претендую на максимальную правильность и буду очень рад критике и обсуждениям в комментариях, что ж - начнем!
Сложность и режим:
Вводные данные следующие. Я играю для удовольствия в режиме карьеры с довольно хардкорными настройками, из основных моментов - множители получения кредитов, науки и репутации 60% от 100. Т.е. получаю почти в два раза меньше чем нужно, и доходы в целом не слишком значительные - это толкает на необходимость брать и паралельно выполнять несколько контрактов, которые условно по пути. 200% штрафы вместо 100%. Экипаж при потере - теряется навсегда, шишки и опыт пилотам, инженерам и ученым придётся набивать заново. Аппараты и их детали греются при полёте через атмосферу, имеют пределы давления и перегрузок, при которых разрушаются (да, всё серьёзно). При этом кербалы (космонавты) теряют сознание от перегрузок с множителем 0.33 (т.е. вырубаются при перегрузках в 3 раза меньше чем обычно). Так же включены полные возможности телекома - т.е. спутник не может управляться, если нет достаточного сигнала со станции или ретрансляторов, а множитель дальности сигнала 65% от 100 (т.е. все антенны слабее и для дальних полетов нужна будет вполне серьёзная ретрансляционная сеть).
Из модов используются аддон для показания науки и где она не собрана, продвинутые приборки в кокпитах, мехджеб для окон характеристик, и планетарные станции для постройки планетарных баз. Фух. На этом всё.
Миссия:
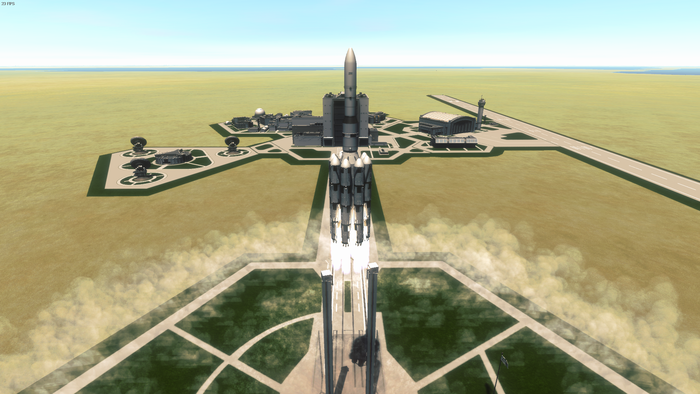
Для тестового поста взял довольно простую миссию, вывести на экваториальную орбиту муны (луны) спутник с термометром.
Постройка:
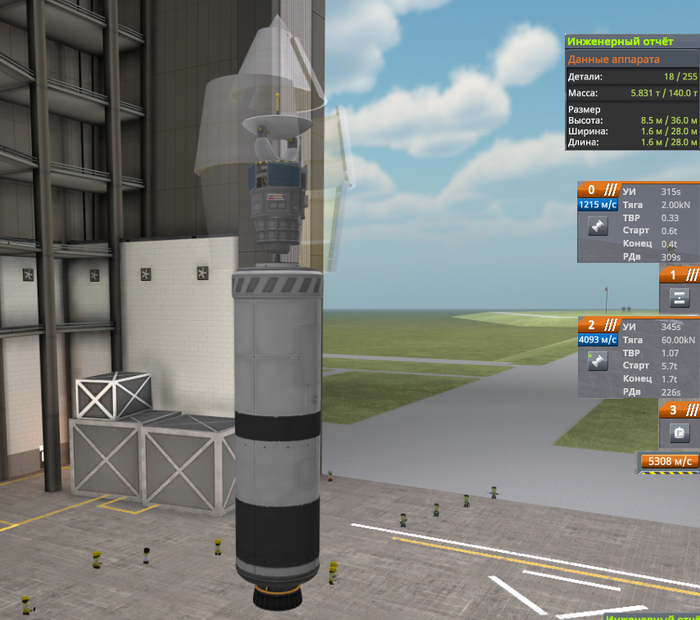
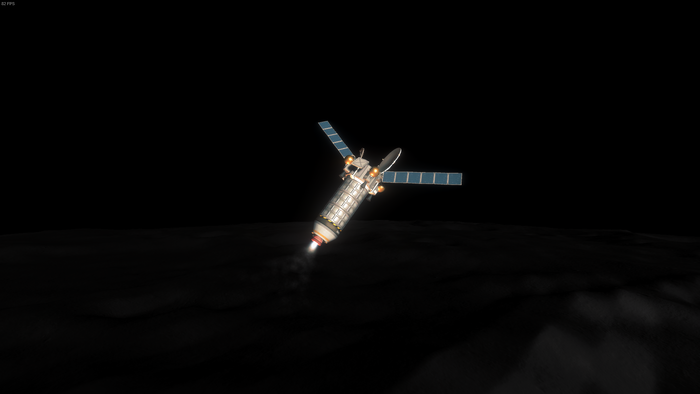
Сам спутник выбрал максимально простой. С гиродином, мелкой батареей, температурным датчиком и датчиком давления. 4 Легких солнечных панели по кругу не дадут спутнику потерять питание. Для увеличения полезности миссии навесил только только открытый слабенький по мощности ретранслятор. Так же использовал простенький двигатель "Муравей" на 2 кН, и мелкий бак, что дало аппарату 1215 ед. дельты V (Вакуум). Данное решение необходимо, для корректировки орбит, если поступит соответствующее задание (как вы помните, доход за счет сложности низкий, а такие вещи будут требовать нулевых затрат денег). Вес получился довольно сносный - 615 кг. Теперь стоит задача построить ракету носитель, которая доставит и желательно выведут на примерно нужную орбиту муны аппарат, чтобы не тратить топливо самого спутника.

Добавляем сбрасываемый обтекатель, для улучшения аэродинамики весом в жестокие 240 кг (но лучше так, чем тереться деталями о плотные слои) и ступень с актуальным на текущий момент по технологическому дереву двигателю для космических перелётов "Терьер" на 60 кН с уд. импульсом (Вакуум) в 345 единиц. Используем 4.5 тонный бак (на сленге их раньше называли "Карандаш"). На данном этапе главное не пожадничать и не понатыкать баков для улучшения запаса дельта V. 4093 единиц более чем достаточно для ступени, тем более в такой конфигурации, у нас получается положительный ТВР (>1), что не позволит нам свалиться на Кербин (землю), если вдруг накосячим с просчетом других ступеней. Уже не кислые 5.831 Тонны получились.
Далее сам РН, который доставит всё это дело до космоса. Для данной карьеры я не использую метод собирания под каждый аппарат РН, а заранее сам собираю оптимальные РН на 5/10/15/20/30/40/50 Тонн (Имеется ввиду тонн выведенных на среднюю круговую 120 км орбиту), но в данном случае сделал исключение, поскольку нужно довольно четко уложиться в минимальную сумму на постройку ракеты, потому миссия выполняет всего 1 задание и растрачиваться на плохо оплачиваемую миссию - глупо.
Сам РН сделал 2-х ступенчатый.
В роли маршевого двигателя выступает LVT-45 "Вертлявый", который позволит управлять ориентацией ракеты за счет меняющегося вектора тяги. Хоть и Факел (LVT-30) имеет более эффективный удельный импульс в плотных слоях атмосферы, меньший вес и лучшую тягу, ставить его не стоит, (у него вектор тяги не меняется) - управлять ракетой будет крайне проблематично (гиродин у спутника слабоватый).
Поскольку одноступенчатые ракеты имеют довольно малый запас дельты, дополним его разгонным блоком.
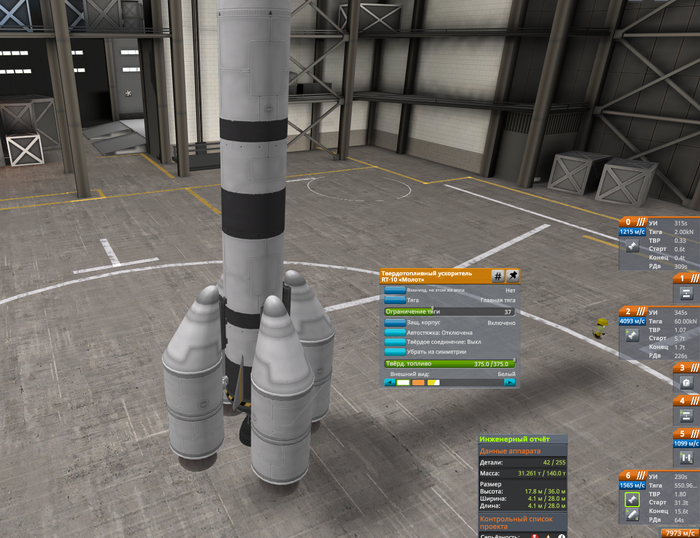
Первичный разгон будет осуществляться совместно с маршевым двигателем твердотопливными ускорителями "Молот" на 4 радиальных сепараторах (чтобы отстегнуть при окончании работы и не тащить лишний вес).
Для подгонки тяги и дельты я использую стандартную правую панель. Я специально ограничил тягу до 37% у ускорителей, чтобы достичь необходимого мне ТВР = 1.80 (отношение тяги к силе тяготения) и максимально продлить время работы ускорителей. К сожалению, я слегка промахнулся и данные верны для вакуума, а не для атмосферы, поэтому в реале на старте тяга была 1.60 вместо 1.80, но об этом позже. Для отсутствия лишних колебаний установил 4 легких стабилизатора - крыла, и скрепил во второй точке ускорители короткими струтами (стяжками)
И последние доработки, стартовые опоры и укрепляющая конструкция - 4 радиально расположенные мелкие 8 угольные балки на ступени с Терьером и стяжки от них к предыдущей - основной ступени (тут как раз балки нужно было поставить на основную ступень, чтобы после расстыковки не тащить лишний вес, но балки легкие, так что не принципиально). Связь вертикальных сепараторов и нагрузка на кожух двигателя - самые слабые места у аппаратов. Без усилений, ракета будет сильнее вибрировать и может рыскать при полете с большой тягой, за счет дрейфа между деталями на стыке ступеней. Здесь аппарат легкий и признаю, что я слегка перестарался, но это почти ничего нам не стоило, поэтому почему бы и нет?
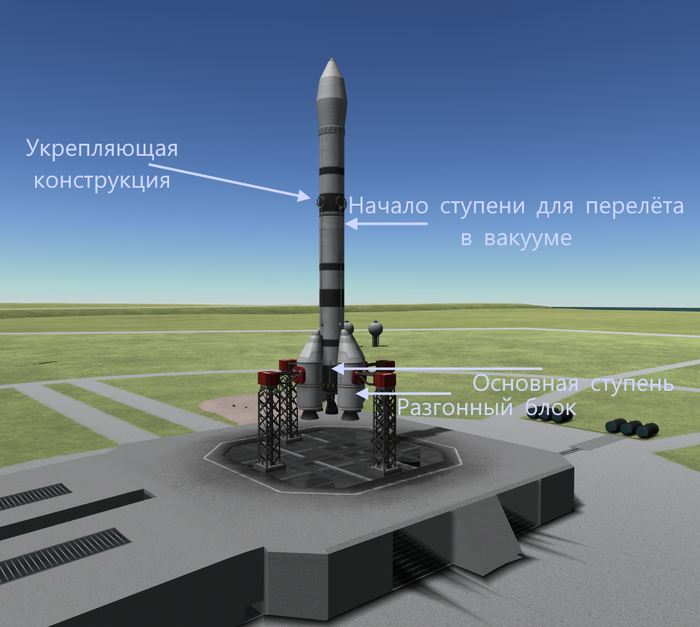
Аппарат вместе с РН получился на 31.865 Тонн веса и имеет прицельный вакуумный запас дельты в 7672 единицы. Что вполне хватит для текущей миссии.
Стартовый ТВР я использую порядка 1.6-1.9 ТВР (чаще всего 1.8), но в данной ситуации, из-за того что забыл вернуть на режим атмосферы, стартовый ТВР вышел в 1.6, что условно в допуске.
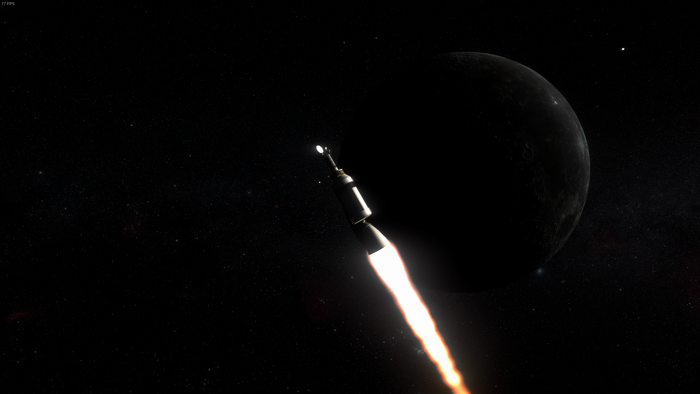
Сам полёт был запланирован на ночь. Для упрощения я не буду выходить на орбиту Кербина, а сразу полечу на перехват Муны (вполне рабочая схема, хоть и не всегда самая оптимальная, но максимально простая). Собственно для не игравших поясню, что если так взлететь и промахнуться мимо луны, что вполне себе запросто то свалишься обратно на кербин, орбитой там и не пахнет. Заходя вперед скажу, что с взаимным расположением я промахнулся, поэтому на орбиту муны залетел не с той стороны, что вызвало проблемы, но об этом позже.

Ночной старт это конечно глаз выколи, но что поделать. Взлетаем просто вертикально вверх и стараемся максимально удержать вектор движения, благо САС с такой конструкцией + LVT 45 отлично и сами с этим справляются - максимально ленивый взлёт.
Как и говорил ранее немного промахнулся с ТВР, собственно зачем нужно поддерживать правильный ТВР, окромя того, что иначе можно банально не взлететь? Ответ простой, есть такая штука как терминальная скорость - простыми словами, если мы будем лишь слегка преодолевать силу тяжести, то мы будем тратить много топлива (дельты) на борьбу с гравитацией, а не на набор скорости, если же мы вкатим ораву двигателей и будем делать ОГРОМНЫЙ ТВР (>3), то мы будем неоптимально использовать топливо по причине излишнего трения об атмосферу, пока она плотная. В целом можно на кербовикипедии нагуглить терминальные скорости для определенных высот, но проще всего соблюдать кербинский ТВР на уровне 1.6-1.9, до того как атмосфера не станет достаточно разряженной (20-35 км.)
Как можно заметить на навиболе на данной высоте моя тяга сильно убавлена (где-то до 50%) это вызвано как раз необходимостью поддерживать адекватный ТВР. Твердотопливные разгонные блоки работают всегда с одинаковой тягой и не регулируются в полёте, соответственно при прожёге их топлива, вся ракета постепенно становится сильно легче, а тяга от двигателей не убавляется, из-за чего ТВР растет в небольшой, но всё же геометрической прогрессии. За счёт этого мы убавляем тягу нашего маршевого двигателя и максимально экономим запас топлива (дельты), а при наборе высоты наш удельный импульс (эффективность использования топлива на единицу тяги) растёт чем ближе мы к вакууму.

Разгонный блок скинут на высоте порядка 30 км. и далее мы имеем опять же оптимальный ТВР для дальнейшего разгона без проблем с гравитацией и трением. Сам же обтекатель можно отстегнуть на высоте 50-60 км - там трение уже незначительное, а сброс 200 кг сэкономит еще немного дельты пока работает основная ступень.
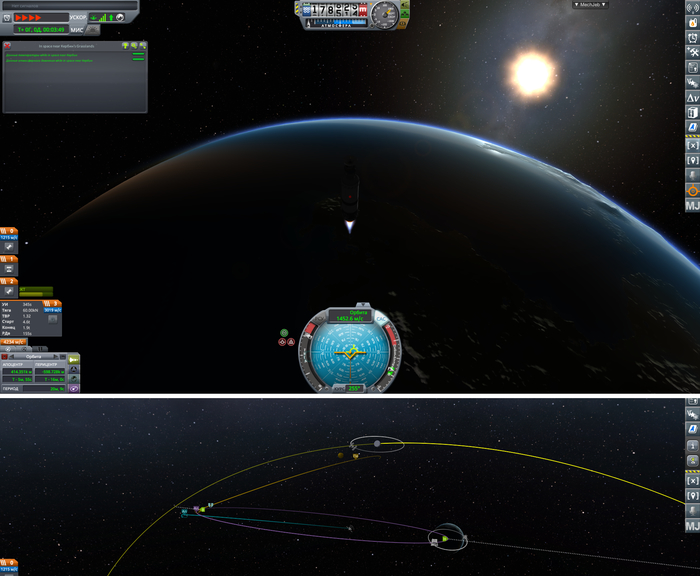
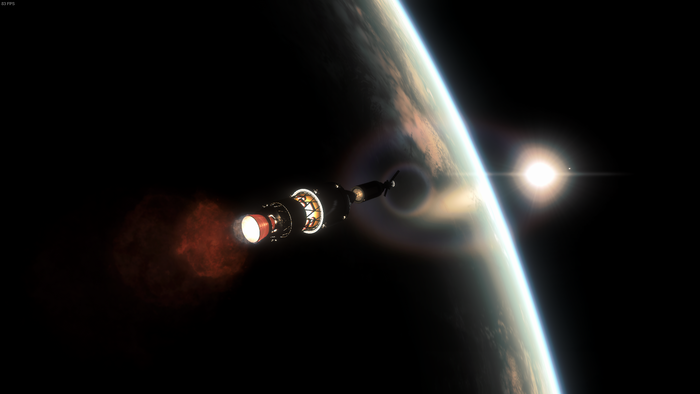
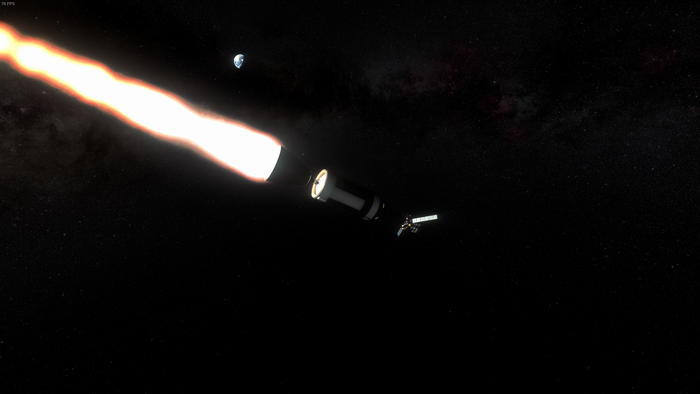
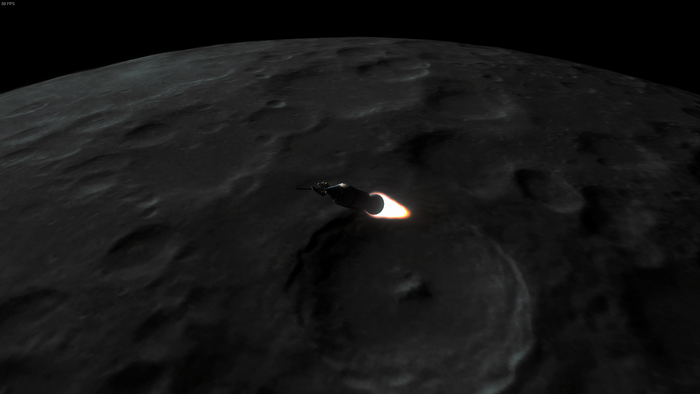
Основная ступень вытолкнула нас где-то на 1/3 расстояния до луны. Обтекатель уже сброшен (увы, не запечатлил). После окончания в ней топлива отстыковываемся и остаемся с комической ступенью с более эффективным в космосе двигателем, хоть и более слабым. Смысл в этом конечно же в том, что во-первых нам уже не нужна тяга в 215 кН и нам не нужно обилие пустых баков и вес этого тяжелого маршевого двигателя. Терьер в 3 раза легче LVT 45 (0.5 т. против 1.5 т) и условно на 10% эффективнее по тяге (но в данном случае вес решает очень значительную роль).
Разгоняемся до точки встречи и пока что отключаем двигатель.
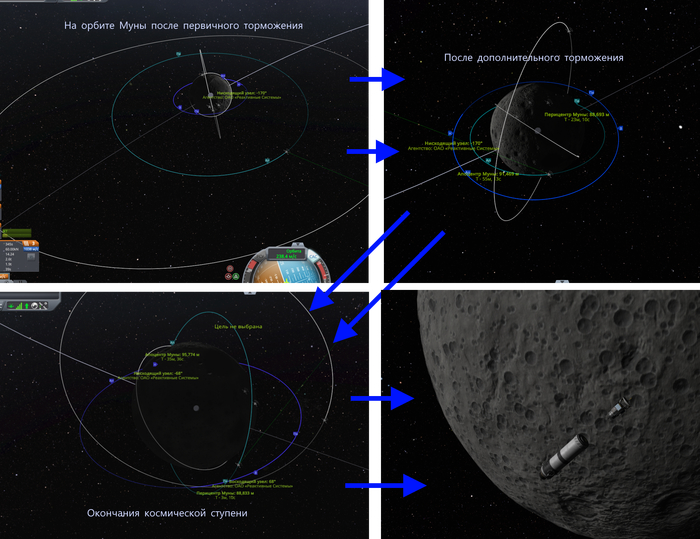
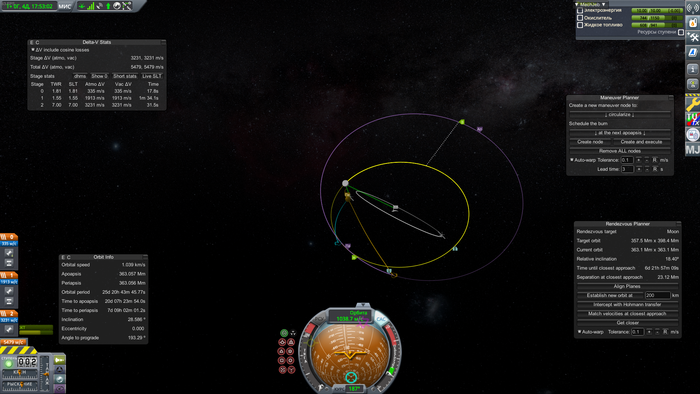
К сожалению, я не посмотрел на направление требуемой орбиты у спутника в миссии, и не заметил что зашёл не с той стороны на орбиту. Белой стрелкой отметил как нужно было в контексте этой миссии

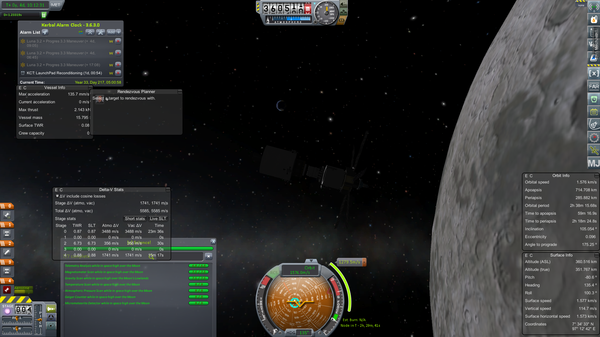
После торможения на Перегее (ближайшей точке к телу) получилась +- округленная орбита, но угол орбит (моей и требуемой) отличался на 170 градусов. Смена угла орбит КРАЙНЕ затратное по топливу занятие, даже в том случае, если это более 15-20 градусов. Мне же необходимо развернуться и лететь считай в другую сторону. Для максимальной экономии, я в первую очередь замедляюсь на апогее (дальней от тела точке) формируя перегей в 90 т. км. Это делаю два раза, чтобы получилась орбита как на правом верхнем скрине - круговая с высотой в 90 км. Чем ниже будет орбита - тем меньше потребуется дельты для смены угла. Однако поскольку поворот слишком большой, совсем низкая высота (10-15 т. км.) при неверном маневре может расшибить нас о Мунный грунт - не рискуем. Запас DeltaV у нас достаточный.
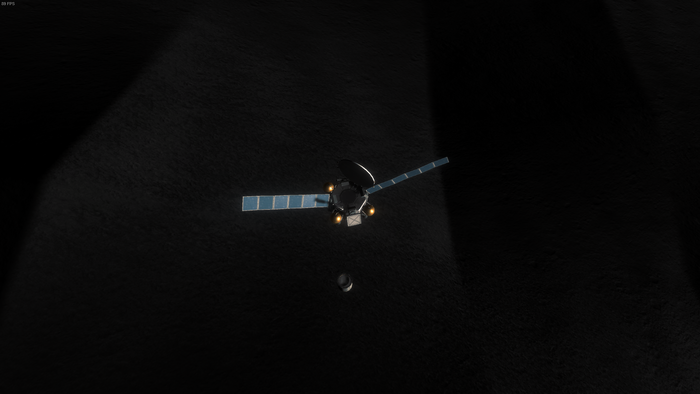
Космическая ступень заканчивается, когда остается 68 градусов разворота. Отстегиваем её, и у нас остается неприкосновенный запас для корректировки орбит самого спутника (1200 Дельты если забыли). На нём и вылезем из этой ситуации. Казалось бы, а откуда в микроскопическом баке с 200 кг топлива столько дельты (до этого 4000 дельты у нас было почти в 5 тоннах топлива)? Ответ крайне простой вес последней ступени чуть больше 600 кг, поэтому даже при таком маленьком запасе и неэффективном, но максимально лёгком двигателе "муравей" мы можем себе позволить такие манёвры.
Корректируем и всё готово. В запасе 566 дельты для коррекции орбиты на следующие задания. Немного, но на одно, а может и два задания хватит.

Итого потрачено на миссию 17.5 т. кербобаксов. При доходе в 65 т. кербобаксов. Собственно последующее когда-нибудь задание на корректировку орбит как раз скорее всего перекроет стоимость запуска.
Пишите, нравятся ли Вам такого рода посты. В будущем планирую более интересные миссии, или объяснения механик, а так же меньшее количество информации для людей неигравших, и больше интересного материала.
Всем спасибо за внимание! Не забывайте этот замечательный проект!
Показать полностью
13


Ответ на пост «Роскосмос придумал гермокабину для работы на других планетах, а также под водой!»
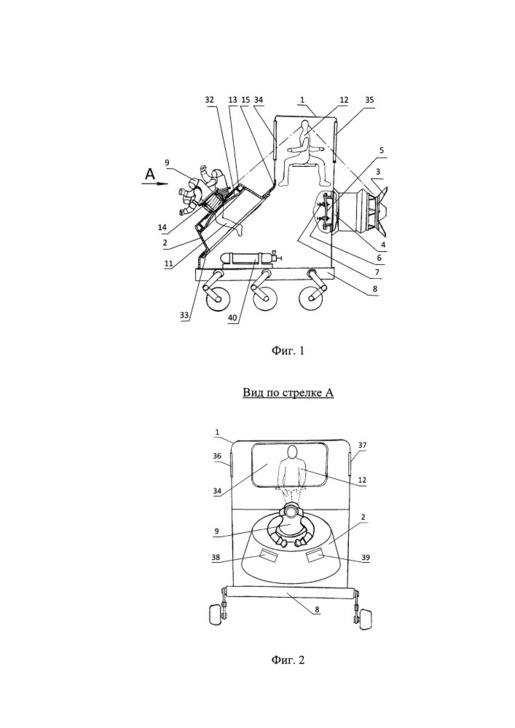
В исходной новости говорится что РКК «Энергия» запатентовала устройство для выполнения ручных операций на поверхности других планет и в опасных газовых и жидких средах.
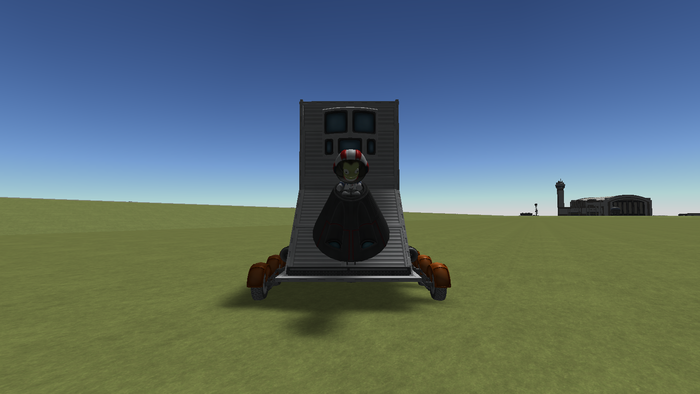
Предполагается что один из космонавтов наполовину находится в гермокабине, наполовину — во фрагменте скафандра, с помощью которого он выполняет внешние работы вручную.
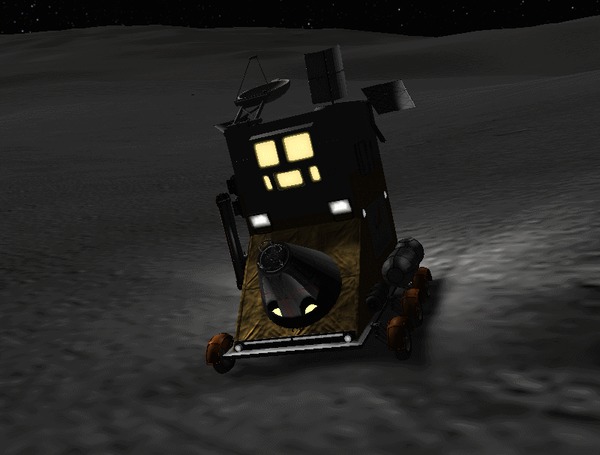
И эскиз данного устройства... мягко говоря сильно сбивает с толку (но об этом позже) - но самое забавное в том, что попробовав по просьбе @PACTulllKA воспроизвести данный агрегат в Kerbal Space Program это получилось даже слишком легко и реалистично! Такое ощущение что он специально под данный симулятор полуаркадного космоса и выдумывался.
Так что желающие могут сравнить результаты и пофантазировать как это чудо могло бы выглядеть в готовом виде исходя из подобных вводных.
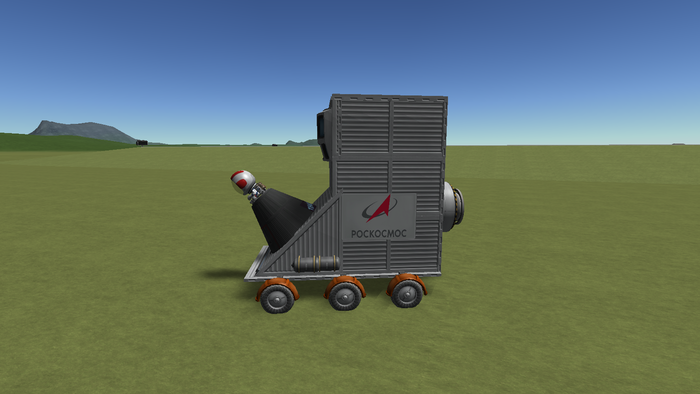
Хотя как по мне данному плоду греха Лунохода-2 и кентавра в этом контексте подходит слегка другое лого.

Плюс я пофантазировал на тему того, как эта колесница хотя бы чисто гипотетически могла бы выглядеть в более, так сказать, законченном и обвешанном необходимыми для заявленной работы узлами и в заявленных же условиях - со всеми необходимыми средствами связи и прочим.
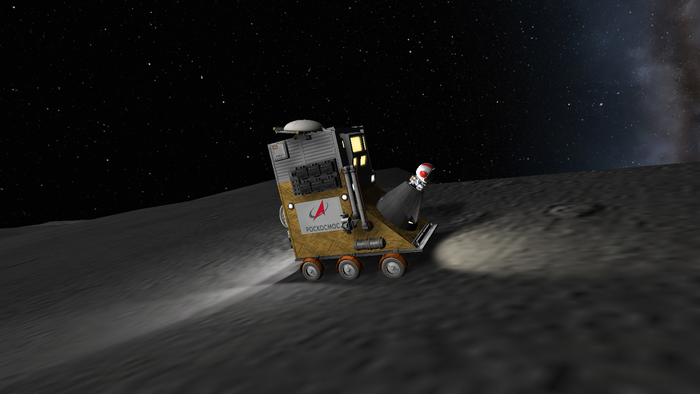
P.S. - в жидких средах оно тонуть отказалось напрочь, так что фото со дна океана, увы, не будет.
Теперь к непонятным пунктам - даже не учитывая крайне мутный спектр задач, решаемых с помощью подобного полумеханического устройства и подозрительно высокий центр тяжести на движущемся шасси (что на неровной местности спокойно приведёт к опрокидыванию) в принципе не понятны два момента:
1) Как торчащий из шлюза космонавт вообще будет способен работать с чем либо за габаритами повозки не говоря уже о прямой работе с поверхностью небесного тела, находящейся метрах в трёх от него?
2) Почему для этого не использовать давным-давно разработанные скафандры, имеющие абсолютно тот же самый функционал при не в меру более высокой мобильности и меньших габаритах - а на повозку оставить только функцию перевозки их экипажа?
Показать полностью
7

Готовы к Евро-2024? А ну-ка, проверим!
Для всех поклонников футбола Hisense подготовил крутой конкурс в соцсетях. Попытайте удачу, чтобы получить классный мерч и технику от глобального партнера чемпионата.
А если не любите полагаться на случай и сразу отправляетесь за техникой Hisense, не прячьте далеко чек. Загрузите на сайт и получите подписку на Wink на 3 месяца в подарок.

Реклама ООО «Горенье БТ», ИНН: 7704722037

Как я пытался посадить БИБ-1Л на Луну
Всем привет!
Сегодня (точнее пару дней назад) я решил установить мод на реалистичную солнечную систему в KSP (RSS). Конечно с начала было очень непревычно понимать, что чтобы вывести на орбиту Земли какой-либо аппарат нужно минимум 9400 м/с, однако с 5 запущенным аппаратом (простые пробники, а также ретрансляторы сигнала) я кое-как освоился с орбитальным полётом.
Сначала подпись, потом картинка
Карта Delta V для Солнечной системы:
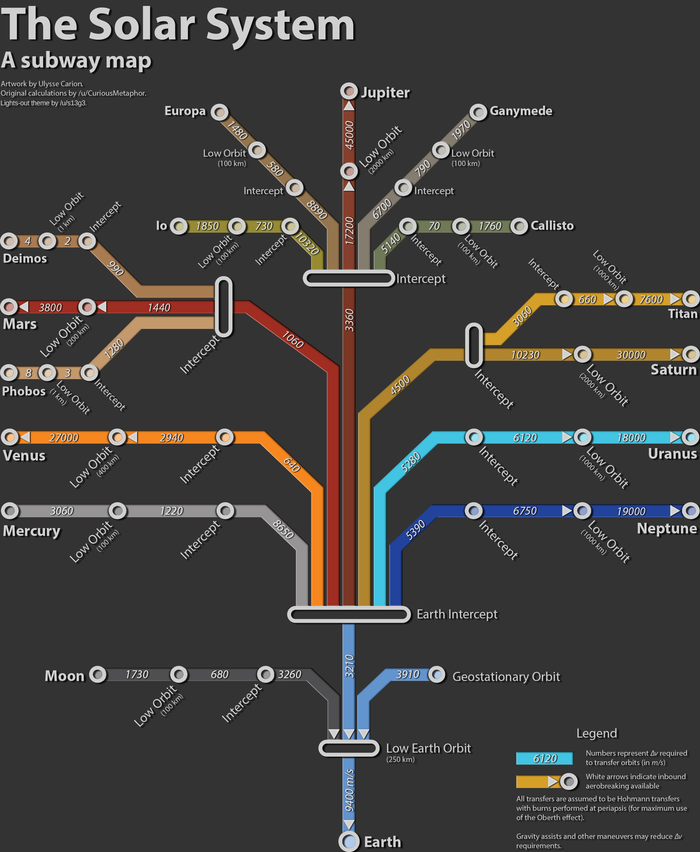
Однако, а что дальше? Я запустил телескоп, я запустил ретранслятор, парочку простых спутников. Дальше нужно было пробовать осваивать Луну.
Первые две ракеты были очень неудачны (база была одна и та же):
По итогу, после двух неудачных запусков (аппараты остались благополучно вращаться на орбите Луны из-за того, что я не взял достаточное количество топлива и на гашение скорости не хватило) я резко эволюционировал (посмотрел карту скоростей) и моя ракета вместе со мной. Были улучшено всё, в том числе и посадочный модуль.
Итак, вот хронология запуска:
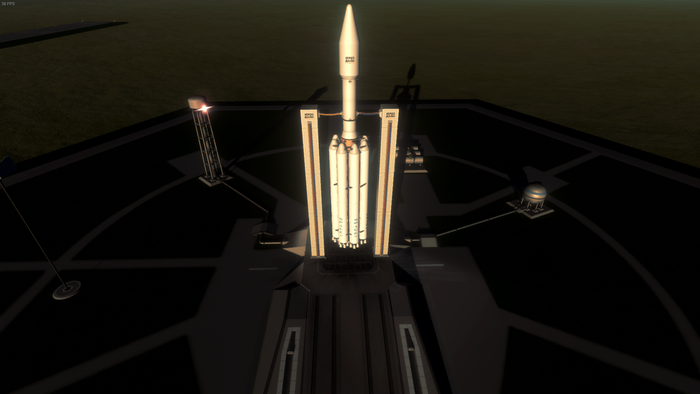
Запуск ракеты был произведён днём. Итоговый запас скорости был около 18000 м/с в вакууме.
Отстыковка ускорителей:

Отделение разгонной части и завершение манёвра. На этом моменте я уже нахожусь на орбите:

А дальше... Дальше Луна. Манёвр на увеличение орбиты:
А вот манёвр по созданию стабильной орбиты в её апоапсисе:
Дело остаётся за малым: выйти на орбиту Луны, приземлиться. В прошлые разы на данном этапе у меня оставалось около 1800 м/c, но сейчас, с переделанной ракетой запаса хватит туда и обратно, чему я очень обрадовался!
Траектория входа в зону притяжения Луны:
Тормозим попутно отделяя пустую ступень.
Тормозим всеми силами, но теперь очень аккуратно!
Осталось совсем чуть-чуть! Посадочный модуль имеет 344 м/с запаса, так что этого хватит.
И... Удача! Всё получилось, чему я несказанно был рад.
По итогу у меня получилось высадить на Луну беспилотный аппарата "БИБ-1Л", но это только начало!
2 бонуса:
Ретранслятор, благодаря которому осуществлялась связь 30% миссии. Видна Луна.
Корректировка орбиты ретранслятора на орбите Луны, благодаря этому аппарату была связь во время миссии по посадке на спутник Земли.
P.S. Играю на своей сложности, с кучей модов (не имбалансных, вроде). Версия 1.9.1. Если есть вопросы - пишите :)
Показать полностью
15

[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник)
Вступление: автоматический тэг "гифка" удалить не получается даже редактированием поста. Извините. К традиционным гифкопостам этот не относится, лишь содержит несколько для наглядности.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/147252351611847087.png)
Параметры ракеты:
Масса: 19,500т (ПН - 450т).
dV: 21,350м\с.
Деталей: около 200.
В принципе эта РН может поднять около 475т на низкую опорную орбиту. Причем на третьей ступени стоят движки с 3-мя зажиганиями - в случае более легкой полезной нагрузки остатки топлива можно использовать для разгона на орбите. Разве что разворачивать эту конструкцию в нужную сторону с помощью маневровых двигателей самого зонда было немного долго. :)
Первая ступень состоит из кластеров двигателей F-1 - порядка 25-30шт.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472524278148139323.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/147252433313861885.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472524307172772186.png)
Боковые ускорители весьма тяжелые - тяги 4-х ретробустеров не хватает, чтобы отвести их на безопасное расстояние от корпуса. Однако, при отделении они ни разу не ударяли по ракете.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472524710153446651.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/147252471918661142.png)
А вот у обтекателя тесты показали недоработку: дефолтной силы отстрела было недостаточно и половинки ударяли по нижней утолщенной части ракеты. Поставил силу отстрела на 100 - теперь все в порядке.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472524877186171908.png)
При сборке и тестировании ракеты столкнулся с неприятным и достаточно известным багом: при попытке разложить солнечные панели и антенны на орбите получаем ошибку - Cannot deploy while stowed. Несмотря на то, что в последних версиях KSP баг был выпилен (так считается), он по-прежнему встречается в RSS. Благодаря этому комментарию на форумах KSP, стало ясно: баг вызывают двигатели RL10 и RD253.
На закругляющей орбиту ступени у меня стояли как раз РД-253. Убрав эти двигатели, я избавился от бага. Вместо них влепил несколько J-2 - тех, что использовались на второй и третьей ступенях ракеты Сатурн-5, которая доставила американцев на Луну.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472525050141992031.png)
Как и расчитывал, третью ступень дожег уже при совершении маневра перелета к Луне. Это сэкономило мне порядка 1300м\с.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472525273110379341.png)
И по прилету к Луне начались проблемы.
Проблема первая - просчет конструкции. Корабль был все еще очень тяжелый и маневровых движков зонда не хватало для его нормальной раскрутки и придания начального импульса для утрамбовки топлива. Приходилось тратить порядка полутора-двух минут, совершать 2 оборота - только тогда топливо "устаканивалось" и можно было включать двигатели. А контроль вектора тяги останавливал вращение.
Проблема вторая - то ли баг, то ли хрен знает что.
Система управления норовила раскручивать корабль по одной из осей. Проверил и MechJeb, и RemoteTech'овский компьютер, и переключался с корабля на корабль, и в KSC выходил. В чем было дело так и не выяснил - проблема сохранялась до самого конца. Лечилась только включением стокового SAS - он удерживал корабль нормально.
Помимо прочего, MechJeb немного взбесился: его Smart A.S.S. очень хреново удерживала вектор маневра. Ну, никто не мешает рулить по-старинке вручную.
Проблема третья - отказалась активироваться посадочная ступень. Пришлось все 8 двигателей запускать вручную, предварительно раскрутив корабль.
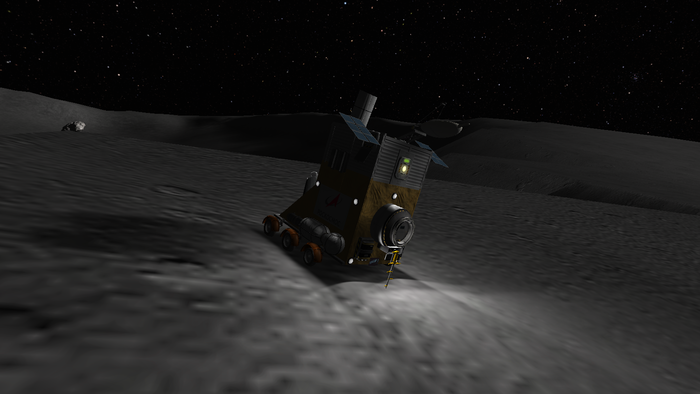
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472525759111011016.png)
Движки - Lunar Descent Engine. По умолчанию они имеют 3 зажигания и очень не любят, когда им подают вакуум в камеру сгорания.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472525869126394870.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472525924172243684.png)
У движков стоит модификация, позволяющая контролировать тягу до 10% минимум. Это практически необходимо при посадке на безатмосферные тела.
Посадка была очень жесткой. Тормозить я как правило начинаю немного заранее - примерно за 1-2 секунды, далее корректирую скорость снижения тягой или вектором тяги. Поскольку снижение не вертикальное, запас времени необходим, если сажаешься на потенциально неровную поверхность. Небольшой холмик в десяток метров и уже можно разбиться. Получилось так, что незадолго до прилунения я недостаточно быстро убавил тягу - в итоге, не коснувшись поверхности, поднялся на 50 метров. Выключать двигатели нельзя - больше возможности их включить не будет. С работающими, пусть и на 10%, двигателями зонд совсем не торопился снижаться, а топлива остались капли.
На оставшихся 15m\s дельты дал полную тягу - корабль "пукнул" и плюхнулся с большой высоты на поверхность. Честно, я думал, хана нижней части и, если после этого зонд завалится, миссии скорее всего тоже конец. Скорость касания заметить не успел - полагаю, до 10м\с. Но подпрыгнул он нехило, после чего маневровые выровняли нос сильно облегченного корабля. Опоры выдержали!
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/147252602812449218.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472526531117531611.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/147252666613609399.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472526669154419608.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472527996124462840.jpg)
Науки собрал на удивление мало: что-то порядка 200-250. Это включая около 5 низкоорбитальных экспериментов из биомов, которые раньше не успевал "обработать".
Эксперименты, правда, еще не все открыты.
Дальше дело за малым. Оставляем посадочную ступень на поверхности, отстыковываемся и домой!
Кстати, у нее есть свой компьютер, батареи и солнечные панели. Модуль не считается за отработанную ступень и потому не должен быть удален игрой автоматически. Возможно, еще вернемся сюда. :)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472526918165559557.jpg)
Ну а дальше - дело за малым. Выйти на низкую орбиту и выполнить прожиг для возвращения домой. На последнюю пару двигателей я поставил модификацию, отключающую контроль тяги, но добавляющий еще 2 зажигания - в итоге имеем 5. Одно для достижения нужной высоты, второе для закругления орбиты. Слишком большая тяга не позволила закруглить ее в один прожиг, а газовать сильно ниже уровня горизонта не хотелось - это потеря топлива. Третье - прожиг домой, четвертое - торможение. Пятое - на всякий случай.
Затмение запечатлеть не получилось - Земля не прошла по диску Солнца.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472527238188697046.png)
Кстати, пригодилась карта высот, сделанная в предыдущем посте. Я не знал минимально допустимую высоту. По карте посмотрел - похоже, наивысшая точка вдоль моей орбиты имеет высоту порядка 17-18км. Орбиту взял 27х22.
Финальное торможение и сброс перицентра до 65км. Помогал маневровыми. Кстати, тоже на последних каплях топлива. Правда, порядка 85% гидрозина я сливал у Луны, чтобы облегчить корабль. В будущем буду брать больше топлива для тормозной ступени - и так впритык хватило даже со сливом лишней массы.
Финальное торможение и сброс перицентра до 65км. Помогал маневровыми. Кстати, тоже на последних каплях топлива. Правда, порядка 85% гидрозина я сливал у Луны, чтобы облегчить корабль. В будущем буду брать больше топлива для тормозной ступени - и так впритык хватило даже со сливом лишней массы.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472527358186910113.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472527405113766059.png)
Сам зонд не имеет ни батарей, ни возможности управления, но отлично стабилизирован для атмосферного торможения - центр масс как раз где надо. Немудрено - щит тяжелый.
Автоматическое раскрытие парашютов по достижении указанной высоты выполняет RealChute.
Сброс всего лишнего и аэродинамическое торможение.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472527651159663564.png)
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472527704114399880.png)
Плазменные эффекты дополнены модом ReentryParticleEffect.
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs4.pikabu.ru/post_img/2016/08/30/3/1472527725112234269.jpg)
И-и.. успешное приводнение!
![[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник) Kerbal Space Program, Игры, Длиннопост, Ракета, Космос, Луна, Гифка](https://cs8.pikabu.ru/post_img/2016/08/30/3/1472527873170055463.jpg)
Пост вышел длинным, даже уперся в лимит по картинкам.
Спасибо за внимание и успешных полетов! :)
Показать полностью
25
Некоторые мои крафт в Kerbal Space Program RO + RSS + RP-0
Все привет. На Пикабу уже были посты про Kerbal Space Program, а вот постов про игру в КСП с модами на реализм я не видал. Так что решил показать некоторое из того что делал сам. Прошу прощения за шакалов, я не ожидал такой подлянки от скриншотов сделанных игрой.

Лунный аппарат. Я выходил на орбит так что бы гарантировано сесть, по тому что поначалу ТВР маленький и с орбиты 100-150 км можно просто не успеть выжечь дельту и разбиться(в первый раз так и вышло). В итоге он сел и осталось еще 1000м/с.




Космическая станция и пристыкованный к ней космический корабль. Масса 60 тонн(без корабля). 3-м кербонавтам ресурсов хватил на 1 год(это если ресурсы корабля в расчет не брать). Есть лаборатория, научные приборы, 2 жилых модуля на 8 человек(это я конечно перегнул).
Всем спасибо за внимание. Если пикабушникам будет интересна эта тема, то могу сделать отдельный пост или цикл постов о том что вас заинтересует(как построить ракету в реалистичном КСП к примеру, или как отправить аппарат на Венеру, Марс).
Я играю с RO, RSS, RP-0. Кто не знает эти моды добавляют реалистичные физику, солнечную систему и карьеру соответственно.
Показать полностью
5