

VentureStar X-33
Полностью функциональная реплика великого проекта SSTO компании Lockheed Martin. Из модов были использованы: B9 pWings для создания фюзеляжа и MK2 для двигателей. На постройку и отладку ушло более недели времени.
Полностью функциональная реплика великого проекта SSTO компании Lockheed Martin. Из модов были использованы: B9 pWings для создания фюзеляжа и MK2 для двигателей. На постройку и отладку ушло более недели времени.
Всем привет!
Сегодня поговорим, о таком замечательном и невероятно доставляющем офигенные ощущения процессе как - Манёвр перехвата и стыковка в Kerbal Space Program. Если вы умеете стыковаться не переходя в режим докинга, скорее всего этот пост не для вас. В посте я максимально просто и доступно постараюсь разложить самый легкий метод стыковки и уверяю вас, если вы ранее сами не стыковались, процесс доставит вам недюжее удовольствие (с 12 года играю, до сих пор нравится стыковаться)
Краткое содержание следующее:
- Строим две простеньких одинаковых ракеты которые запустим в космос на разные орбиты.
- Взлетаем
- Формируем точку перехвата (Рендеву)
- Стыкуемся
Выглядит достаточно просто, особенно если никогда в KSP не играли (но по факту это не совсем так) :)
Давайте по порядку.
Аппарат:
Повторить его максимально просто.
Легкая посадочная рубка (у нее самый большой запас монотоплива из всех простых кабин), над ней гиродин и порт для стыковки средний.
Для обучения может понадобиться много монотоплива, поэтому поставьте несколько баков типа "ПЕЛЬМЕНЬ" или других. Забегая вперед скажу, что на стыковку мне потребовалось где-то 8-12 ед. монотоплива, но возьмите с запасом около 50-100.
Далее вниз ставим стандартный карандаш (бак на 4.5 т. веса) и полукарандаш (2.25 т.) далее вертлявый LVT 45.

Боковые ступени легче всего сделать из 1 карандаша и 1 вертлявого LVT 45. Размещать лучше всего на длинный вертикальный сепаратор (ТТ-70) по 2-ой (не 4-ой) симметрии и включать пропуск ресурсов. Смысл в том, что разместив по двойной симметрии и включив пропуск ресурсов, мы можем скопировать сепаратор со всеми прикрепленными к нему деталями и настройками (наводим на него мышкой - ALT + ЛКМ) и ставим еще раз с двойной симметрией под 90 градусов.
В этом случае, разделив парный отстрел боковушек на две ступени (ступень 1 и ступень 0 справа снизу) настройки перекачки топлива сформируются автоматически и ничего не надо будет трогать.
Все двигатели мы запускам разом удерживая адекватный ТВР тягой (1.8). Получится, что сначала все двигатели будут питаться из баков первых двух боковушек, а после отстрела, все двигатели будут есть из вторых двух боковушек, в этом случае, когда все 4 боковушки будут отстреляны, центральный бак останется полным и нетронутым, за счет чего дельта скорости будет хорошо распределена по ступеням. Раньше такие перекачки делались через жёлтые шланги в топливном разделе (можно сделать так и сейчас без включения пропуска ресурсов). С одной пары боковушек шланг из бака ставится в другую пару боковушек, а из второй пары боковушек в центральный бак, и всё будет абсолютно так же.

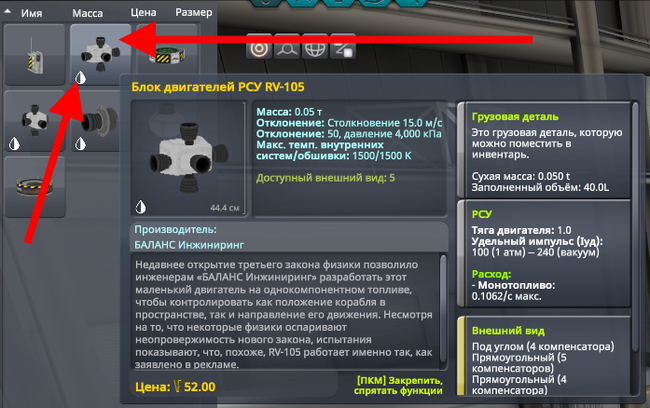
В качестве двигателей ориентации используем двигатель RV-105 (с переключением на второй вариант капелькой в левом нижнем углу - вариант с 5-ю соплами). С таким видом РСУ у вас будет меньше всего проблем, и в такой конфигурации можно обойтись всего 4-мя такими двигателями, но мы для простоты будем использовать 8 таких.
Касательно размещения РСУ (RSC). Размещать их следует равноудаленно от центра масс того, что вы собираетесь этими движками ориентировать и стыковать. Явно боковушки в космосе уже будет отстреляны, поэтому нам нужен центр масс последней ступени. На первом скриншоте, я пометил примерное место ЦМ красным крестом. Ставим двигатели на как можно более дальнем и одинаковом расстоянии от ЦМ с 4-ой симметрией.
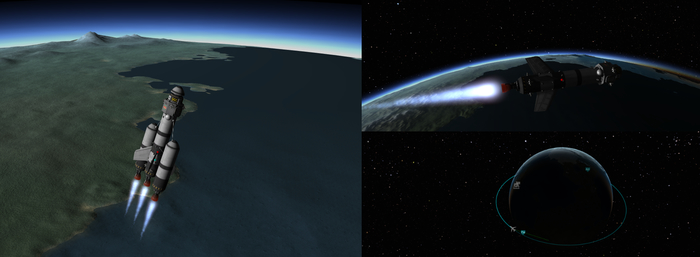
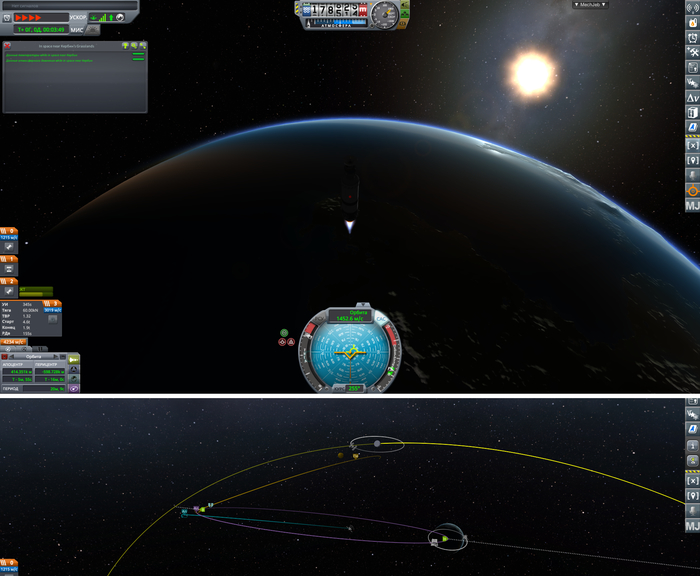
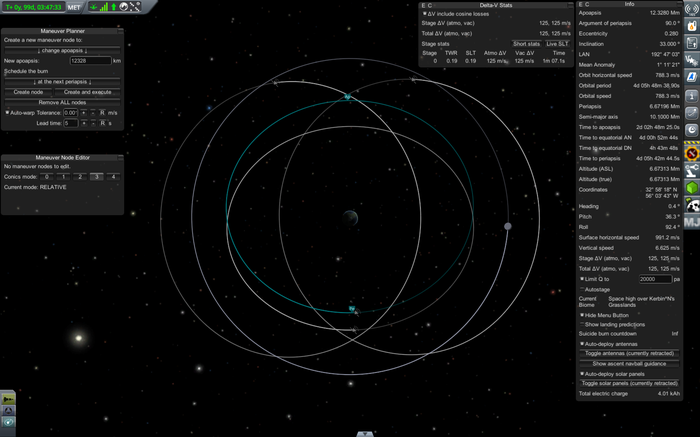
Выводим 1 аппарат на околокруговую орбиту высотой +- 100 км.
2-ой аппарат выводим на орбиту с другой высотой +- 200 км
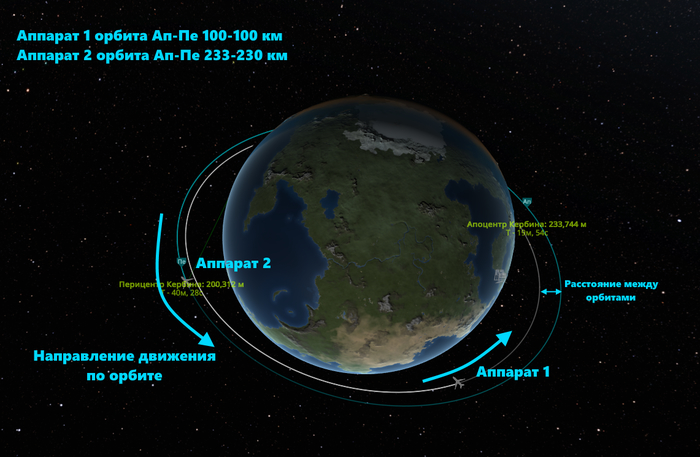
Получается следующая картинка:
Далее необходимо понять достаточно фундаментальные зависимости и понятия. Космос огромный и встретиться просто так понятное дело - невозможно. Нам необходимо двум аппаратам подлететь друг к другу и замереть на месте. Т.е. необходимо чтобы орбита у обоих аппаратов была абсолютно одинаковой. Тогда возникает вопрос, зачем мы выводим два аппарата на разные высоты? Для понимания разберем небольшой пример:
Если мы запустим два аппарата со старта друг за другом к примеру с задержкой в несколько десятков минут и выведем на одинаковые орбиты, они будут вращаться вокруг земли с одинаковой скоростью, но на определенном расстоянии друг от друга (более 100 км) и не приближаться и не отдаляться друг от друга.
В этом случае возникает следующий вопрос.
Почему бы одному аппарату не ускориться и не догнать второй? А потому что сама орбита (эллипс с максимально удаленной от земли точкой (апогей Ап) и максимально близкой к земли точкой (перигей Пе)) напрямую связана со скоростью движения аппарата. Если мы меняем нашу скорость у нас изменяется траектория нашего движения вокруг земли, изменяется и апогей и перигей. Т.е. мы перестанем лететь по той же траектории, что летит второй аппарат из-за чего только улетим дальше от него.
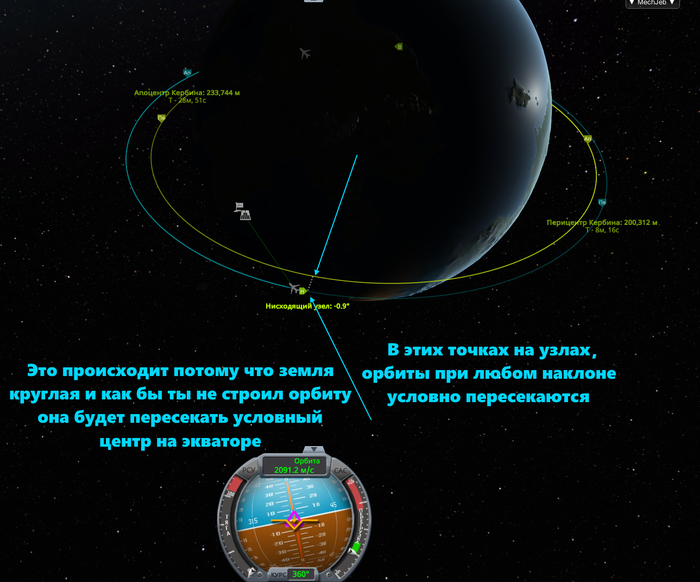
Поэтому необходимо сделать манёвр перехвата. Вот что надо знать - чем ниже у нас орбита (чем ближе эллипс орбиты к земле) тем быстрее мы по ней летим, а чем выше у нас орбита, тем медленнее мы двигаемся. Исходя из этого, смотря на картинку сверху можно сделать вывод, что аппарат 1 двигается быстрее и совершает один оборот вокруг кербина за время меньшее чем аппарат 2. Исходя уже из этого можно сказать, что постепенно аппарат 1 (смотря на данную картинку) будет потихоньку догонять аппарат с обратной стороны. Будет всё ближе с каждым оборотом вокруг земли, и в определенный момент оба аппарата будет находиться на расстоянии равным расстоянию между их орбитами (отмечено на картинке).
По сути, чтобы построить маневр перехвата, нам нужно дождаться момента нужного оборота вокруг кербина, во время которого расстояние между объектами будет минимальное. Поняв что на текущем обороте вокруг кербина мы будем ближе всего, нам нужно скорректировать орбиту так, чтобы расстояние между орбитами в точке сближение было равно 0. В этом случае, в точке мы действительно встретимся с аппаратом на определенной дистанции, но за счет разных орбит у нас будет очень высокая скорость встречи, от несколько десятков метров в секунду до нескольких сотен.
Забавный факт, когда я начинал играть в KSP я подумал что будет довольно занятной идеей встретиться двум аппаратам если лететь по орбитам в две разные стороны (орбиты с 180 гр. отличия) я довольно серьёзно подошел к делу совместил точку перехвата до 200-300 метров и при встрече офигел, что поскольку аппараты летят в разные стороны, скорость пролёта мимо цели составляла несколько километров в секунду (помахал ручкой).
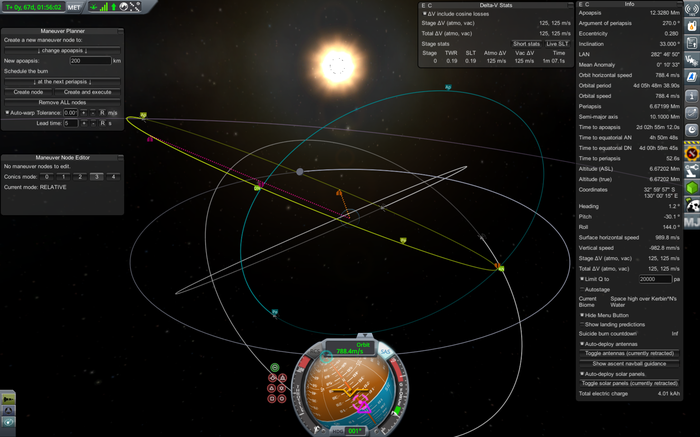
Чтобы минимизировать скорость встречи, необходимо сделать первый важный этап в маневре перехвата - совместить плоскости орбит. Т.е. сделать так, чтобы углы орбит 1го и 2го аппарата были одинаковые. Для этого мы на карте отмечаем целью второй аппарат. После чего видим два зеленых маркера. В и Н - восходящий и нисходящий узел
Далее мы выжидаем когда наш аппарат будет максимально близок к этому узлу и делаем прожиг в сторону - Нормали (если узел нисходящий) и Антинормали (если узел восходящий). Нормаль помечена на навиболе Фиолетовым трегуольником с точкой, а антинормаль другой схожей фиолетовой фигурой.
Прожигаем смотря прямо на карту и видим как узел постепенно приближается к 0. Для стыковки желательный угол не более 0,2 градусов, а лучше 0. Если угол будет больше, все равно можно совместить точки сближения, но скорость встречи мало того, что будет большой, так еще и будет изменяться каждую секунду за счет неточного угла.
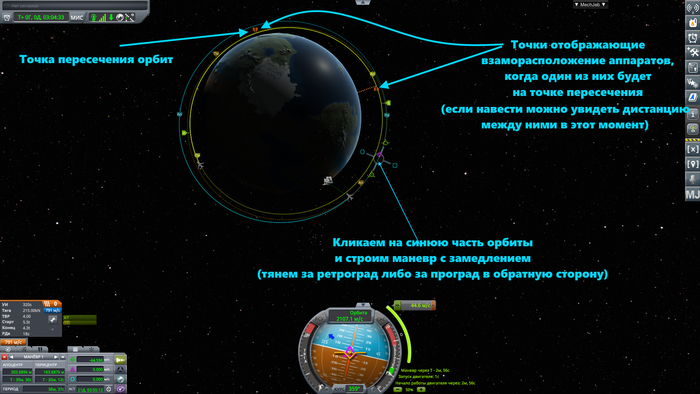
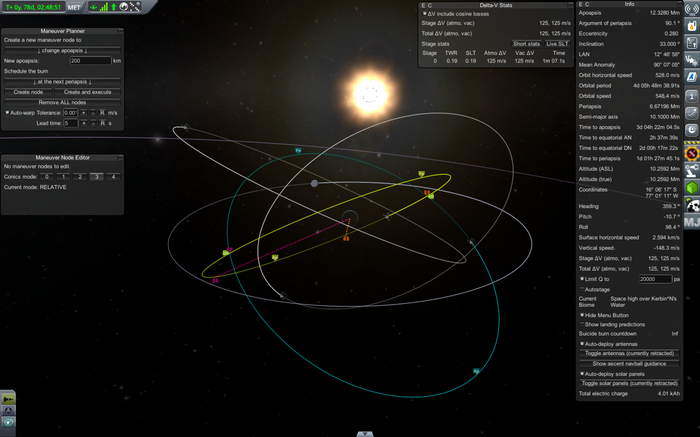
Далее мы можем либо просто подождать, как я писал выше круга, на котором мы будем ближе всего, либо заранее прикинуть маневр и дистанции. Точки пересечения будут видны после того как вы спланируете или выполните маневр.
Сам манёвр можно таскать за середину меняя время старта этого маневра (в нашем случае торможения (прожига на ретроград) т.к. мы будем тормозить с аппарата на внешней орбите, а не ускорятся с того что на внутренней. Таская манёвр мы будем видеть, что точки взаиморасположения аппаратов будем удаляться и сближаться, в зависимости от правильной и неправильной стороны в которые мы тянем манёвр.
Два варианта перехвата:
Вариант посложнее: Покрутиться на орбите и поподбирать маневр на ней таская его по времени старта, пока не удастся совместить точку встречи хотя бы в километрах 10-15. (Если всё сделать правильно то можно сразу свести до расстояния менее 1 км.)
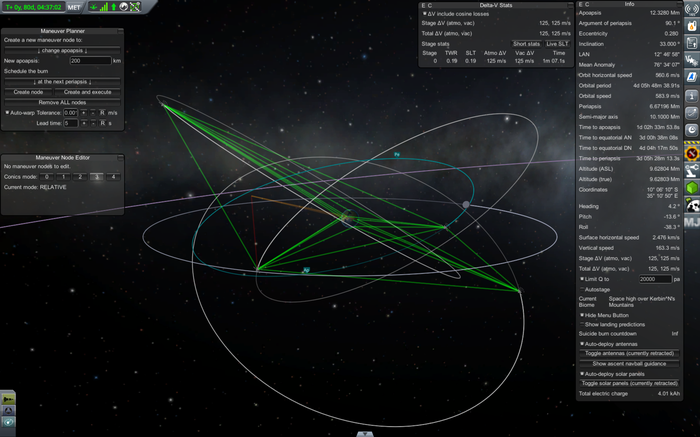
Вариант полегче:
За счет этих инструментов и перемоток времени мы подгоняем точки пересечения орбит и делаем маневр (прожиг), чтобы сделать точку пересечения орбит и не смотрим как взаиморасполагаются аппараты.
После этого мы поймем, что каждый круг у нас дистанция между аппаратами в точке встречи будет сокращаться, либо удлиняться (если не повезет), но всё равно через определенное время начнет сокращаться. Просто ждем когда расстояние на встрече будет небольшим. Для кербина на высоте +- 100 км, считаю что 50 км, это максимальное расстояние, на котором можно пробовать делать сближения, иначе можно черпануть за верхние слои атмосферы и разбиться невнимательно выполняя следующие манёвры.
Что случилось если появились ещё и фиолетовые маркеры?
Это значит что вы сделали аппарату такую траекторию, что с орбитой второго аппарата она пересекается не в одной точке, а в двух и маркеры попарного цвета помогут так же сделать сближение в одной или другой точке или подогнать их манёвром. (В случае с двойным пересечением скорость встречи будет скорее всего выше)
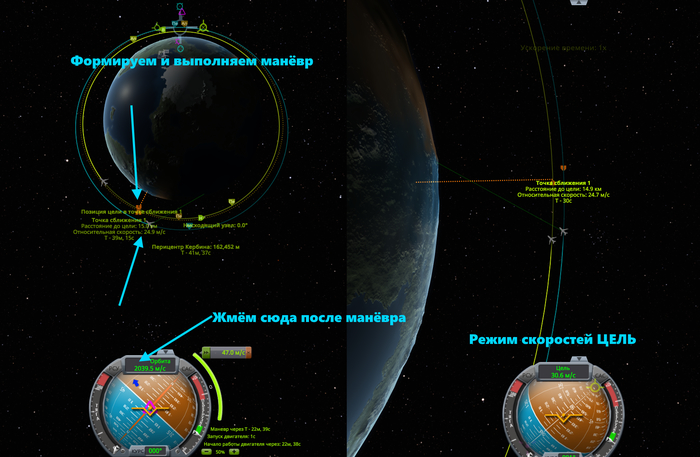
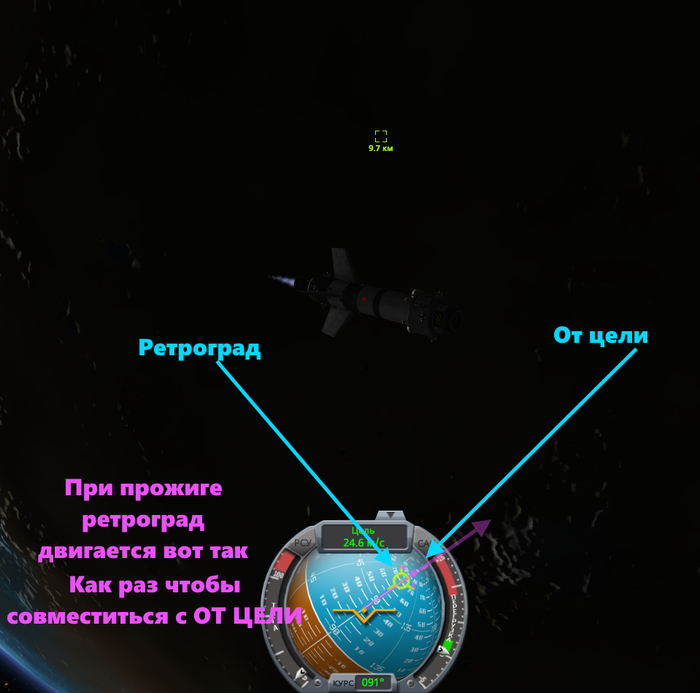
Когда у нас есть дистанция менее 50 км между аппаратами всё сводится к простой работе с навиболом (шаром ориентации снизу). Переключаем его с режима орбита в режим ЦЕЛЬ.
В целом о том что творится на навиболе. Благодаря нему мы можем понимать в пространстве куда смотрит нос нашего аппарата, а так же в какую сторону мы летим. Это практически всё что нужно знать чтобы сделать последующий перехват. (Кстати если вдруг не замечали, оранжевая часть поверхности навибола значит что мы смотрим в планету, а синяя от неё)
Когда мы находимся в режиме ПОВЕРХНОСТЬ или ОРБИТА мы видим значком зеленого кружка и трёх линий то направление в которое направлен наш вектор движения, а такой же значок с перечеркнутым кружком показывает обратное направление - против движения. Когда мы выбираем небесное тело или аппарат целью, у нас появляются на навиболе еще 2 значка. Фиолетовый круг состоящий из 4 частей и точкой по середине и фиолетовая точка с тремя линиями под 120 градусов. Первый значок означает то направление в котором находится цель, а второй значок логичным образом располагается на обратной стороне навиболе и показывает обратное от цели направление.
Когда мы переходим в режим навибола - ЦЕЛЬ, в графе со скоростью отображается НАША СКОРОСТЬ ОТНОСИТЕЛЬНО ЦЕЛИ. При этом у нас есть значок направления к ЦЕЛИ и значок ПРОГРЕЙДА (направление куда мы летим). Я думаю, что вы уже догадались, что используя один навибол, можно сделать прожиг так, чтобы ПРОГРЕЙД встал ровно на направление к цели и чем ближе мы к цели, тем более точно мы сможем с ней сближаться (Значок цели будет постоянно смещаться).
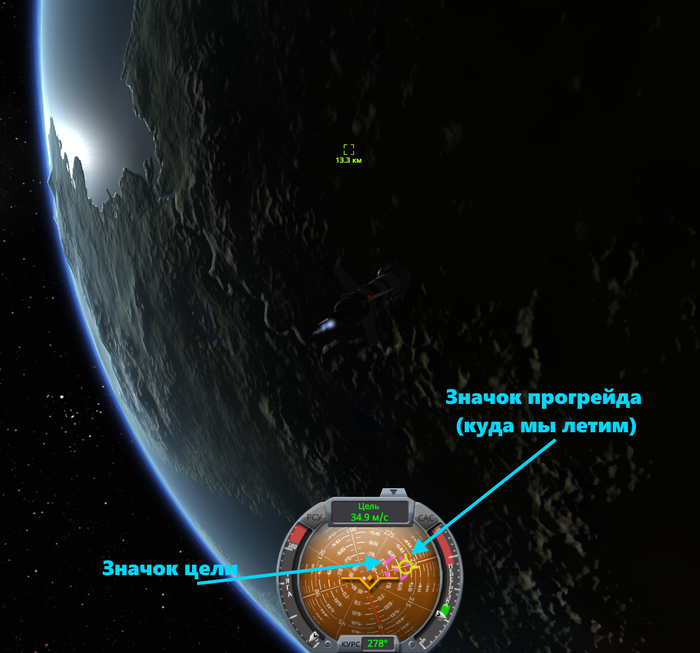
Из всего вышесказанного можно сделать вывод, что если значок прогрейда и значок направления цели будут видимы на одном экране навибола друг с другом вместе, то мы будем двигаться к цели (аналогично ретрогрейд и "от цели"), а если мы будем видеть значок "от цели" с прогрейдом либо "к цели" с ретрогрейдом - то отдаляемся.
Далее необходимо понять как это дело туда-сюда движется. Когда мы становимся в определенную точку как на картинке сверху и прожигаем топливо. Значок прогрейда тянется к нашей текущей позиции, а так же в текущей ситуации прогрейд тянется к точке "К ЦЕЛИ" и в этом случае скорость движения к цели увеличивается.
Естественно сделать это на глазок за раз сложно и не выйдет, поэтому следующим этапом, мы просто удерживаем прогрейд в сторону цели и перематываем время пока он не убегает с цели. Как вы можете заметить ускоряться сильно и до бесконечности не стоит, потому что мы просто резко пролетим мимо. Поэтому когда мы окажемся довольно близко (меньше 5 км). Тоже самое действие можно проделывать со значком РЕТРОГРАД и ОТ ЦЕЛИ. Только в этом случае при прожиге РЕТРОГРАД не тянется к нашему положению, а наоборот УБЕГАЕТ от него в другую сторону, а скорость относительно цели уменьшается. (Ретроград необходимо удерживать на значке ОТ ЦЕЛИ).
Данными манипуляциями и перемоткой времени сокращаем дистанцию до 50-100 метров. (Чем ближе находимся к аппарату, тем больше стараемся снижать скорость относительно цели чтобы не пролететь). Когда дистанция станет небольшой просто встаём на ретрогрейд в режиме навибола ЦЕЛЬ и гасим скорость до нуля.
Поздравляю вы только что сделали манёвр перехвата. И кстати говоря, теперь вы можете перехватывать так любое небесное тело (луны, другие планеты).
Погасив же скорость до нуля мы будем спокойненько висеть рядом и практически не двигаться. Однако нужно понимать, что скорость на навиболе отображается с точностью до десятых частей, поэтому при перемотке времени мы всё равно будем слегка двигаться относительно второго аппарата.

Далее правой кнопкой мыши кликаем по порту которым хотим стыковаться на текущем аппарате - жмем УПРАВЛЯТЬ ОТСЮДА. Это перенесёт всё навибольные вещи именно на точку порта, что позволит более точно прицелиться для простой стыковки.
Кликаем правой кнопкой мыши по порту К КОТОРОМУ будем стыковаться - Задать цель.
Эти кнопки максимально правильно разместят на навиболе взаиморасполагающиеся маркеры К ЦЕЛИ и ОТ ЦЕЛИ, что позволит сразу же всё легко провернуть.

Далее вращаемся так, чтобы портом нацелиться на маркер К ЦЕЛИ (Нацеливаемся на порт)

Переходим на второй аппарат (горячая кнопка быстрого переключения "[" и "]" (на русской раскладке Х и Ъ) и делаем тоже самое (выставляемся на к ЦЕЛИ). Начинаем смотреть К ЦЕЛИ. В этом случае останется просто прожаться немного монотопливными двигателями и сделать небольшую скорость относительно двух целей (0.2-0.3 м/с) и удерживать цель и вектор движения.
Теперь как это сделать. Для начало разберем режим стыковки.

Режим стыковки включается снизу слева на второй значок сверху. После чего выползает вот такой вот экранчик как в левом углу, однако он по сути не сильно помогает.
Режим стыковки имеет 2 режима взаимодействия. ЛИН режим и ВРЩ. Переключаться между этими режимами можно горячей кнопкой ПРОБЕЛ - не бойтесь, в режиме стыковки ступени не срабатывают.
В режиме ВРЩ все наши кнопки работают как обычно на WASD и QE мы делаем Крен, Тангаж и Рысканье. В режиме ЛИН мы формируем смещения, т.е. при нажатии WASD мы смещаем аппарат как показано на рисунке ниже.

Обязательно включаем режим стабилизации (гор. клавиша T) без него после прожига РСУ мы будем мотаться как колбаса, если двигатели размещены не равноудаленно от центра масс.
В режиме ВРЩ мы ориентируемся, а в режиме ЛИН делаем смещения чтобы лететь куда надо используя кнопки. Расположение этого креста (WASD как на картинке выше, может быть развернуто относительно продольной оси аппарата (я нарисовал не совсем корректно где D на самом деле будет W и всё остальное так же сместиться на 90 гр, поскольку перед у аппарата где стекло у рубки с обратной стороны от текущего вида), поэтому можно сменить вид за которым летит камера на ФИКСИРОВАННЫЙ и понять всё будет намного проще (смена вида на гор. клавишу V).
По сути нам необходимо в режиме ЛИН включить на R РСУ и целясь в порт на навиболе немного нажать на Shift. Это датс нам небольшой импульс в сторону аппарата. После чего можно вернуться в режим ВРЩ и подгонять своё направление к порту (только желательно в режиме ВРЩ вырубать РСУ на R, чтобы неравномерным прожигом не сместить вектор движения) Если же при полете, мы видим, что наш прогрейд уходит от маркера К ЦЕЛИ, мы в режиме ЛИН с включенным R используем WASD чтобы разместить прогрейд на маркер к ЦЕЛИ. Чтобы легко застыковаться нужно иметь скорость 0.1-0.4 м/с. Когда вы будете рядом с портом, порт магнитом начнет притягиваться, и останется лишь в режиме ВРЩ правильно выставить аппарат, чтобы в точке соединения не было ПЕРЕЛОМА.
Если вы зашли с большой скоростью и после сцепки разлетелись - вставайтесь в режиме ВРЩ на прогрейд или ретрогрейд и используйте режим ЛИН, а так же SHIFT и CNTRL чтобы загасить скорость до нуля с помощью RSC. И снова потребуется либо развернуть оба аппарата друг к другу - лицом к лицу, либо же на РСУ сделать небольшой облёт, имея полученные знания и работая с навиболом и изображением.
Ваша первая стыковка принесет вам невиданное удовольствие и собирать корабли на орбите очень классно. Поэтому обязательно пробуйте и делитесь тем что у Вас получилось в комментах, а так же, не забывайте делать быстрое сохранение когда слетитесь близко, чтобы несколько раз иметь возможность попробовать постыковаться.
В дальнейшем разберу ситуацию как стыковаться не передними, а боковыми или максимально стрёмно расположенными портами и подобные вещи.
Пишите ваши вопросы и комментарии, присылайте что у вас вышло.
С Вами был Finn163. Спасибо за внимание.

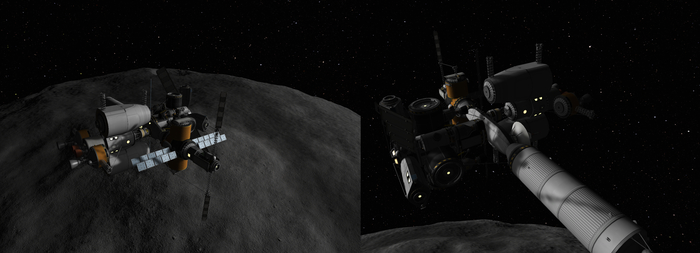
Небольшой бонус моя станция из прошлой карьеры на орбите Гилли (спутник Евы) весом в 170 тонн (гнал туда с кербина 4мя или 5ю партиями и стыковался на орбите), а так же подключение топливных стержней для тягача космопоезда одного из модулей станции.
Добрый всем день! Меня зовут Finn163 и когда-то давно (2012 г. с версии 0.17) я люто играл и стримил Kerbal Space Program и активно общался на тематическом форуме, но в связи, что форум уже довольно непопулярный, и люди там общаются неактивно, я решил немножко попоститься здесь.
К моему счастью, люди до сих пор случайно наталкиваются на такой замечательный проект Kerbal Space Program и за кратчайшие сроки понимают теорию космических перелётов лучше чем за годы обучения в институте, по многим причинам, но в данном посте не об этом.
Собственно, я надеюсь, что все не игравшие к этому приобщаться, а игравшие найдут что-то полезное и интересное в моих постах. Я не претендую на максимальную правильность и буду очень рад критике и обсуждениям в комментариях, что ж - начнем!
Сложность и режим:
Вводные данные следующие. Я играю для удовольствия в режиме карьеры с довольно хардкорными настройками, из основных моментов - множители получения кредитов, науки и репутации 60% от 100. Т.е. получаю почти в два раза меньше чем нужно, и доходы в целом не слишком значительные - это толкает на необходимость брать и паралельно выполнять несколько контрактов, которые условно по пути. 200% штрафы вместо 100%. Экипаж при потере - теряется навсегда, шишки и опыт пилотам, инженерам и ученым придётся набивать заново. Аппараты и их детали греются при полёте через атмосферу, имеют пределы давления и перегрузок, при которых разрушаются (да, всё серьёзно). При этом кербалы (космонавты) теряют сознание от перегрузок с множителем 0.33 (т.е. вырубаются при перегрузках в 3 раза меньше чем обычно). Так же включены полные возможности телекома - т.е. спутник не может управляться, если нет достаточного сигнала со станции или ретрансляторов, а множитель дальности сигнала 65% от 100 (т.е. все антенны слабее и для дальних полетов нужна будет вполне серьёзная ретрансляционная сеть).
Из модов используются аддон для показания науки и где она не собрана, продвинутые приборки в кокпитах, мехджеб для окон характеристик, и планетарные станции для постройки планетарных баз. Фух. На этом всё.
Миссия:
Для тестового поста взял довольно простую миссию, вывести на экваториальную орбиту муны (луны) спутник с термометром.
Постройка:
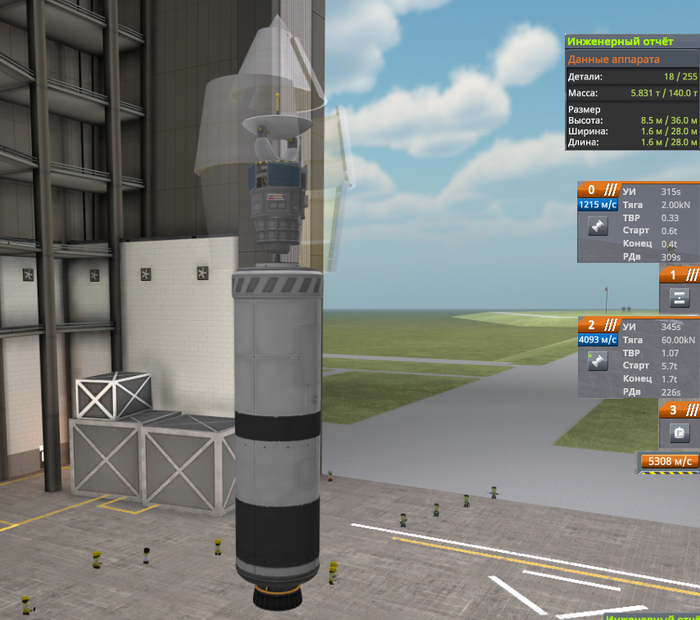
Сам спутник выбрал максимально простой. С гиродином, мелкой батареей, температурным датчиком и датчиком давления. 4 Легких солнечных панели по кругу не дадут спутнику потерять питание. Для увеличения полезности миссии навесил только только открытый слабенький по мощности ретранслятор. Так же использовал простенький двигатель "Муравей" на 2 кН, и мелкий бак, что дало аппарату 1215 ед. дельты V (Вакуум). Данное решение необходимо, для корректировки орбит, если поступит соответствующее задание (как вы помните, доход за счет сложности низкий, а такие вещи будут требовать нулевых затрат денег). Вес получился довольно сносный - 615 кг. Теперь стоит задача построить ракету носитель, которая доставит и желательно выведут на примерно нужную орбиту муны аппарат, чтобы не тратить топливо самого спутника.

Добавляем сбрасываемый обтекатель, для улучшения аэродинамики весом в жестокие 240 кг (но лучше так, чем тереться деталями о плотные слои) и ступень с актуальным на текущий момент по технологическому дереву двигателю для космических перелётов "Терьер" на 60 кН с уд. импульсом (Вакуум) в 345 единиц. Используем 4.5 тонный бак (на сленге их раньше называли "Карандаш"). На данном этапе главное не пожадничать и не понатыкать баков для улучшения запаса дельта V. 4093 единиц более чем достаточно для ступени, тем более в такой конфигурации, у нас получается положительный ТВР (>1), что не позволит нам свалиться на Кербин (землю), если вдруг накосячим с просчетом других ступеней. Уже не кислые 5.831 Тонны получились.
Далее сам РН, который доставит всё это дело до космоса. Для данной карьеры я не использую метод собирания под каждый аппарат РН, а заранее сам собираю оптимальные РН на 5/10/15/20/30/40/50 Тонн (Имеется ввиду тонн выведенных на среднюю круговую 120 км орбиту), но в данном случае сделал исключение, поскольку нужно довольно четко уложиться в минимальную сумму на постройку ракеты, потому миссия выполняет всего 1 задание и растрачиваться на плохо оплачиваемую миссию - глупо.
Сам РН сделал 2-х ступенчатый.
В роли маршевого двигателя выступает LVT-45 "Вертлявый", который позволит управлять ориентацией ракеты за счет меняющегося вектора тяги. Хоть и Факел (LVT-30) имеет более эффективный удельный импульс в плотных слоях атмосферы, меньший вес и лучшую тягу, ставить его не стоит, (у него вектор тяги не меняется) - управлять ракетой будет крайне проблематично (гиродин у спутника слабоватый).
Поскольку одноступенчатые ракеты имеют довольно малый запас дельты, дополним его разгонным блоком.
Первичный разгон будет осуществляться совместно с маршевым двигателем твердотопливными ускорителями "Молот" на 4 радиальных сепараторах (чтобы отстегнуть при окончании работы и не тащить лишний вес).
Для подгонки тяги и дельты я использую стандартную правую панель. Я специально ограничил тягу до 37% у ускорителей, чтобы достичь необходимого мне ТВР = 1.80 (отношение тяги к силе тяготения) и максимально продлить время работы ускорителей. К сожалению, я слегка промахнулся и данные верны для вакуума, а не для атмосферы, поэтому в реале на старте тяга была 1.60 вместо 1.80, но об этом позже. Для отсутствия лишних колебаний установил 4 легких стабилизатора - крыла, и скрепил во второй точке ускорители короткими струтами (стяжками)
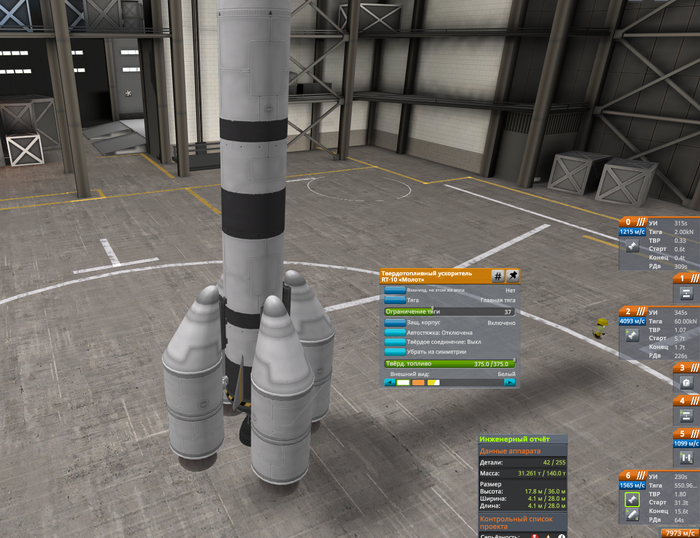
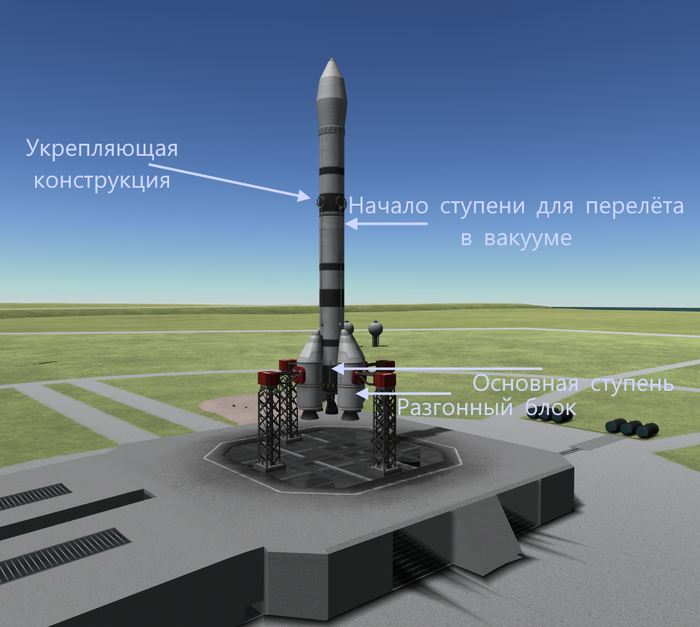
И последние доработки, стартовые опоры и укрепляющая конструкция - 4 радиально расположенные мелкие 8 угольные балки на ступени с Терьером и стяжки от них к предыдущей - основной ступени (тут как раз балки нужно было поставить на основную ступень, чтобы после расстыковки не тащить лишний вес, но балки легкие, так что не принципиально). Связь вертикальных сепараторов и нагрузка на кожух двигателя - самые слабые места у аппаратов. Без усилений, ракета будет сильнее вибрировать и может рыскать при полете с большой тягой, за счет дрейфа между деталями на стыке ступеней. Здесь аппарат легкий и признаю, что я слегка перестарался, но это почти ничего нам не стоило, поэтому почему бы и нет?
Аппарат вместе с РН получился на 31.865 Тонн веса и имеет прицельный вакуумный запас дельты в 7672 единицы. Что вполне хватит для текущей миссии.
Стартовый ТВР я использую порядка 1.6-1.9 ТВР (чаще всего 1.8), но в данной ситуации, из-за того что забыл вернуть на режим атмосферы, стартовый ТВР вышел в 1.6, что условно в допуске.
Сам полёт был запланирован на ночь. Для упрощения я не буду выходить на орбиту Кербина, а сразу полечу на перехват Муны (вполне рабочая схема, хоть и не всегда самая оптимальная, но максимально простая). Собственно для не игравших поясню, что если так взлететь и промахнуться мимо луны, что вполне себе запросто то свалишься обратно на кербин, орбитой там и не пахнет. Заходя вперед скажу, что с взаимным расположением я промахнулся, поэтому на орбиту муны залетел не с той стороны, что вызвало проблемы, но об этом позже.

Ночной старт это конечно глаз выколи, но что поделать. Взлетаем просто вертикально вверх и стараемся максимально удержать вектор движения, благо САС с такой конструкцией + LVT 45 отлично и сами с этим справляются - максимально ленивый взлёт.
Как и говорил ранее немного промахнулся с ТВР, собственно зачем нужно поддерживать правильный ТВР, окромя того, что иначе можно банально не взлететь? Ответ простой, есть такая штука как терминальная скорость - простыми словами, если мы будем лишь слегка преодолевать силу тяжести, то мы будем тратить много топлива (дельты) на борьбу с гравитацией, а не на набор скорости, если же мы вкатим ораву двигателей и будем делать ОГРОМНЫЙ ТВР (>3), то мы будем неоптимально использовать топливо по причине излишнего трения об атмосферу, пока она плотная. В целом можно на кербовикипедии нагуглить терминальные скорости для определенных высот, но проще всего соблюдать кербинский ТВР на уровне 1.6-1.9, до того как атмосфера не станет достаточно разряженной (20-35 км.)
Как можно заметить на навиболе на данной высоте моя тяга сильно убавлена (где-то до 50%) это вызвано как раз необходимостью поддерживать адекватный ТВР. Твердотопливные разгонные блоки работают всегда с одинаковой тягой и не регулируются в полёте, соответственно при прожёге их топлива, вся ракета постепенно становится сильно легче, а тяга от двигателей не убавляется, из-за чего ТВР растет в небольшой, но всё же геометрической прогрессии. За счёт этого мы убавляем тягу нашего маршевого двигателя и максимально экономим запас топлива (дельты), а при наборе высоты наш удельный импульс (эффективность использования топлива на единицу тяги) растёт чем ближе мы к вакууму.

Разгонный блок скинут на высоте порядка 30 км. и далее мы имеем опять же оптимальный ТВР для дальнейшего разгона без проблем с гравитацией и трением. Сам же обтекатель можно отстегнуть на высоте 50-60 км - там трение уже незначительное, а сброс 200 кг сэкономит еще немного дельты пока работает основная ступень.
Основная ступень вытолкнула нас где-то на 1/3 расстояния до луны. Обтекатель уже сброшен (увы, не запечатлил). После окончания в ней топлива отстыковываемся и остаемся с комической ступенью с более эффективным в космосе двигателем, хоть и более слабым. Смысл в этом конечно же в том, что во-первых нам уже не нужна тяга в 215 кН и нам не нужно обилие пустых баков и вес этого тяжелого маршевого двигателя. Терьер в 3 раза легче LVT 45 (0.5 т. против 1.5 т) и условно на 10% эффективнее по тяге (но в данном случае вес решает очень значительную роль).
Разгоняемся до точки встречи и пока что отключаем двигатель.
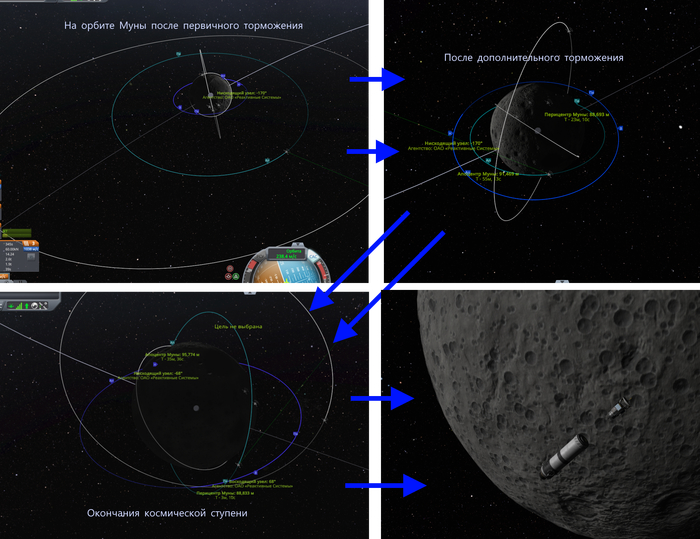
К сожалению, я не посмотрел на направление требуемой орбиты у спутника в миссии, и не заметил что зашёл не с той стороны на орбиту. Белой стрелкой отметил как нужно было в контексте этой миссии

После торможения на Перегее (ближайшей точке к телу) получилась +- округленная орбита, но угол орбит (моей и требуемой) отличался на 170 градусов. Смена угла орбит КРАЙНЕ затратное по топливу занятие, даже в том случае, если это более 15-20 градусов. Мне же необходимо развернуться и лететь считай в другую сторону. Для максимальной экономии, я в первую очередь замедляюсь на апогее (дальней от тела точке) формируя перегей в 90 т. км. Это делаю два раза, чтобы получилась орбита как на правом верхнем скрине - круговая с высотой в 90 км. Чем ниже будет орбита - тем меньше потребуется дельты для смены угла. Однако поскольку поворот слишком большой, совсем низкая высота (10-15 т. км.) при неверном маневре может расшибить нас о Мунный грунт - не рискуем. Запас DeltaV у нас достаточный.
Космическая ступень заканчивается, когда остается 68 градусов разворота. Отстегиваем её, и у нас остается неприкосновенный запас для корректировки орбит самого спутника (1200 Дельты если забыли). На нём и вылезем из этой ситуации. Казалось бы, а откуда в микроскопическом баке с 200 кг топлива столько дельты (до этого 4000 дельты у нас было почти в 5 тоннах топлива)? Ответ крайне простой вес последней ступени чуть больше 600 кг, поэтому даже при таком маленьком запасе и неэффективном, но максимально лёгком двигателе "муравей" мы можем себе позволить такие манёвры.
Корректируем и всё готово. В запасе 566 дельты для коррекции орбиты на следующие задания. Немного, но на одно, а может и два задания хватит.

Итого потрачено на миссию 17.5 т. кербобаксов. При доходе в 65 т. кербобаксов. Собственно последующее когда-нибудь задание на корректировку орбит как раз скорее всего перекроет стоимость запуска.
Пишите, нравятся ли Вам такого рода посты. В будущем планирую более интересные миссии, или объяснения механик, а так же меньшее количество информации для людей неигравших, и больше интересного материала.
Всем спасибо за внимание! Не забывайте этот замечательный проект!
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
Наверное, не он один такой. Но это все же круто!
У пользователя Reddit The_Goodest_Dude свершилась первая рабочая неделя в NASA. И он благодарит Скотта Мэнли, Мэтта Лоун и KSP за вдохновение следовать за своей мечтой.
А неплохо, а!
Скотт Мэнли давно создает научно-познавательные видео, ровно как и любит KSP.
Мэтт Лоун специализируется как на KSP, так и на некоторых других играх.
Оригинальный пост: https://www.reddit.com/r/KerbalSpaceProgram/comments/ixg6hy/...
Реакция официального аккаунта KSP в Twitter: https://twitter.com/KerbalSpaceP/status/1310600533334425601
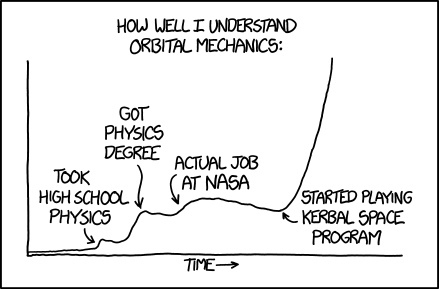
(Вообще, картинка немного обратное показывает, но, черт, так она даже еще больше в тему!)
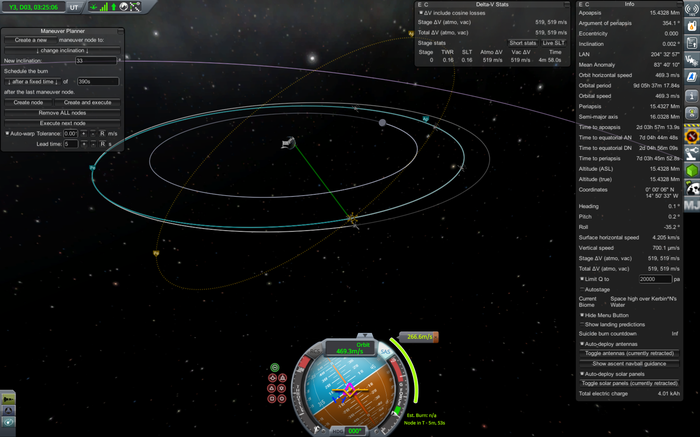
Итак, в прошлой части мы выяснили, что оптимальным вариантом решения проблемы потери связи (и, соответственно, управления) аппаратами на низких орбитах и в атмосфере будет вывод четырех спутников на орбиты высотой 6672 х 12328 км, наклонением 33° и долготами восходящих узлов, отличающимися на 90°. Был составлен следующий план полета:
1. Вывод ракеты-носителя со спутниками на борту на низкую экваториальную орбиту Кербина (80 км).
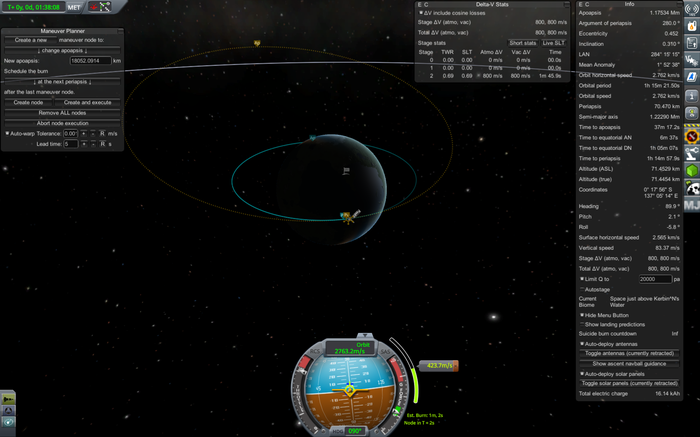
2. Переход на переходную орбиту 80 х 18052.091 км.
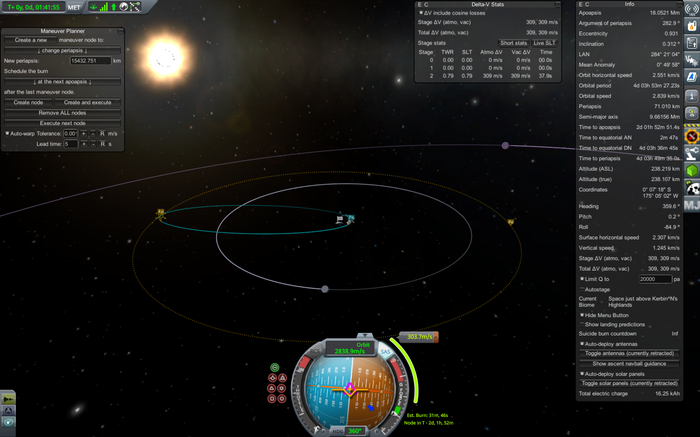
3. Переход на резонансную орбиту 15432.751 х 18052.091 км.
4. На каждом витке в периапсисе отделяем один из четырех спутников. Спутники скругляют орбиту до опорной высотой 15432.751 км.
5. Изменение наклонения орбиты каждого из четырех спутников до 33°.
6. Переход на переходную к целевой орбиту 6672 х 15432.751 км для каждого из четырех спутников.
7. Переход на целевую орбиту 6672 х 12328 км для каждого из четырех спутников.
8. Возвращение верхней ступени ракеты-носителя с использованием гравитационного маневра у Муны.
Итак, теперь осталось этот план реализовать.
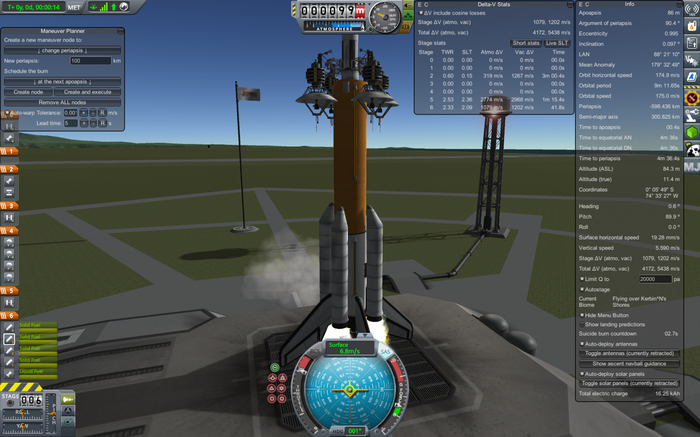
Взлет

Отделение твердотопливных ускорителей - они разобьются о поверхность океана. В принципе, можно было бы посадить их на парашютах, но, насколько я помню, в KSP исчезают все объекты в атмосфере, находящиеся достаточно далеко от текущего выбранного. Копаться в настройках и ставить моды я не хочу. Вообще, это не особо страшно - твердотопливные ускорители стоят три копейки, спасать и переиспользовать их особо незачем.
На момент отделения орбита ракеты незамкнута, максимальная высота - 13.6 км

Отделение аэродинамических стабилизаторов. Учитывая, что они достаточно легкие и большие, скорее всего, они войдут в атмосферу без особых проблем и разобьются о поверхность. Отделение стабилизаторов нужно для упрощения возвращения нижней ступени.

Отделение нижней ступени ракеты-носителя. На момент отделения орбита ракеты - 160 х -3 км, лишь слегка задевает поверхность, так что нижняя ступень войдет обратно в атмосферу - попытаемся ее посадить в океан для переиспользования. Верхняя же ступень выполнит маневр скругления орбиты (ускорение на 72.9 м/с, уже запланировано на этом скриншоте), и, соответственно, перейдет на низкую орбиту Кербина. Похожую схему запуска использовали Шаттлы - основной двигатель выключался незадолго до достижения орбиты, после чего производилось отделение топливного бака (падающего обратно на Землю), а сам Шаттл с использованием системы орбитального маневрирования довыводился на орбиту.

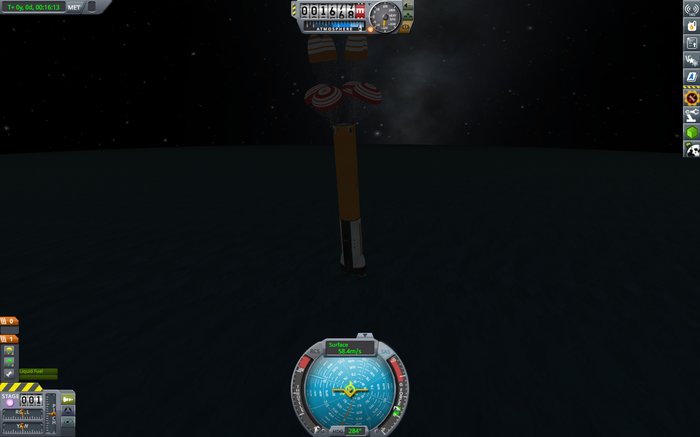
Нижняя ступень входит в атмосферу. Я не использую теплозащиту, так что температура достаточно близка к критической.
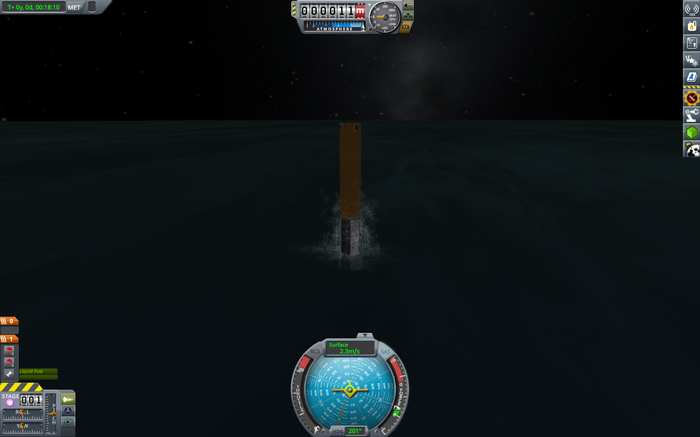
Раскрытие парашютов нижней ступени и ее успешное приводнение.
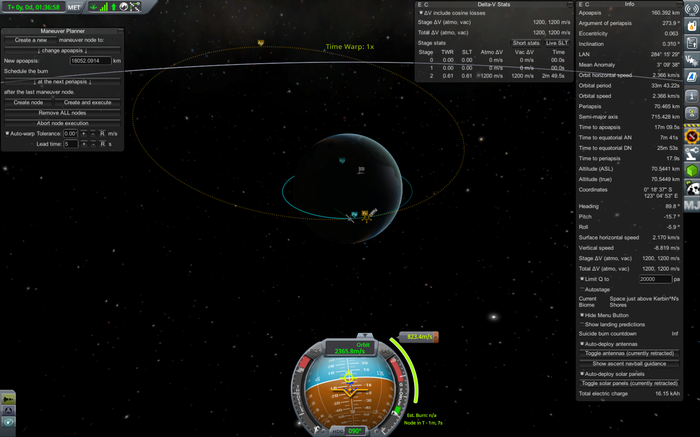
Верхняя ступень ракеты-носителя на низкой орбите (70 х 160 км). К сожалению, не удалось выйти на прямо совсем экваториальную орбиту, и наклонение 0.31° надо будет скорректировать. Запланирован маневр перехода на переходную орбиту. На поверхности планеты видно космодром запуска (флажок) и место посадки нижней ступени (не знаю, как этот значок назвать).
Потеря связи (красный значок в левом верхнем углу) в середине выполнения маневра. Вот именно для того, чтобы такого не было, и нужна система ближней космической связи.
Ракета на переходной орбите (71 х 18052 км). Из-за того, что предыдущий маневр был перевыполнен, пришлось сделать лишнюю коррекцию, потратив драгоценное топливо. В итоге следующий маневр (переход на резонансную орбиту) требует 303.7 м/с изменения скорости, а у нас осталось всего 309. Дальнейшие маневры придется делать очень аккуратно, и ни о каком возврате верхней ступени на Кербин речь уже не идет.

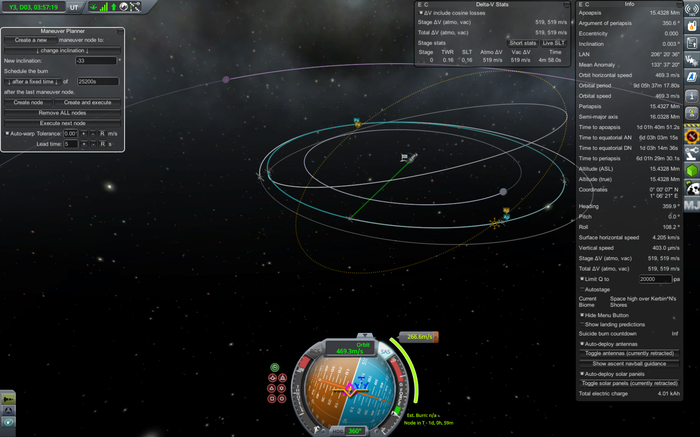
Ракета на резонансной орбите (15432 х 18052 км), осталось лишь скорректировать наклонение, которое было неверно набрано при запуске. К счастью, топлива на это как раз хватает.
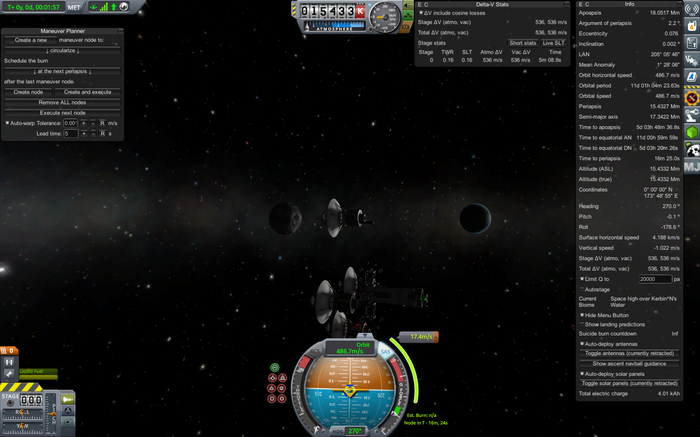
Отделение первого спутника связи, запланирован маневр скругления орбиты (до круговой опорной орбиты 15432 км). Следующий спутник будет отделен через один оборот ракеты по резонансной орбите (соответственно, через 9/8 оборота спутника по опорной орбите). Все отделения и скругления одинаковые, а пост у нас не резиновый, так что пропустим их.
Все 4 спутника находятся на опорной орбите (экваториальной, 15432 км, обозначена белым цветом), с разницей в 45°. Ракета остается на резонансной орбите (синяя), и, учитывая, что топлива почти не осталось, видимо, останется на ней навсегда.
Изменяем наклонение орбиты одного из спутников.
И второго.

И третьего.
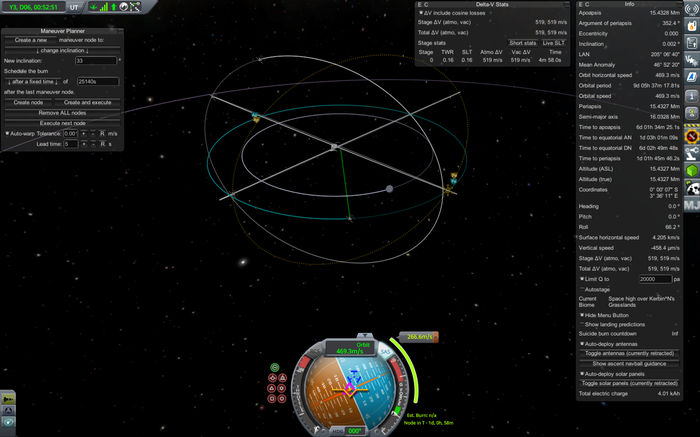
И четвертого.

Один из спутников переходит на орбиту, переходную к целевой (6672 х 15432 км).
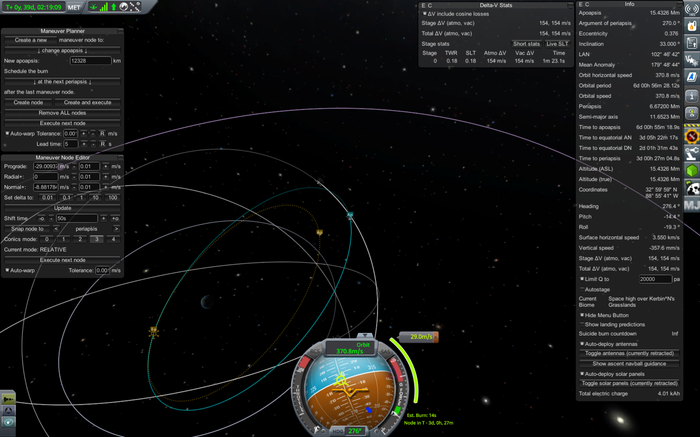
Запланирован маневр перехода на целевую орбиту (6672 х 12328 км, обозначена желтым цветом).

Ура, спутник выведен куда нужно! Ориентируем его перпендикулярно плоскости эклиптики (на глаз), чтобы антенна никогда не заслоняла солнечные батареи от света. Снизив максимальную мощность двигателя до 0.5% от номинальной, и снизив подачу топлива до минимума, небольшими коррекциями добиваемся совпадения периодов обращения всех четырех спутников - это нужно для того, чтобы они не дрейфовали относительно друг друга. Ну и, конечно, не забываем повторить процедуру для остальных трех спутников.
Созвездие целиком, вид с полюса. Видно, что два спутника находятся с одной стороны от планеты, а два - с другой, как и планировалось. Скриншот очень похож на соответствующую картинку из патента.
Вид на все созвездие сбоку. На первом скриншоте выделены (синим и желтым) спутники 1 и 3, на втором - 2 и 4.
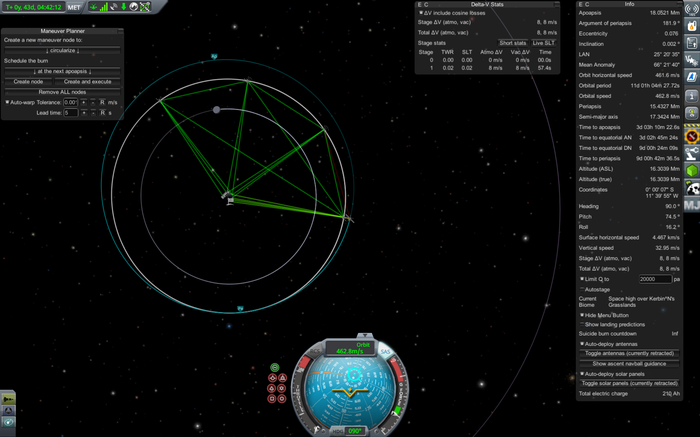
Визуализация линков между спутниками. Созвездие образует неправильную трехгранную пирамиду, и Кербин всегда полностью находится внутри нее, поэтому вся его поверхность постоянно имеет связь со спутниками. Ура, задача завершена!
Жаль, конечно, что не получилось вернуть верхнюю ступень обратно на Кербин, плодить космический мусор не круто, но что уж тут поделать. Надо было больше делать запас топлива на всякий случай или внимательнее следить за возможной потерей связи. Хорошо, что больше нам эта проблема не грозит!
Не так давно, играя в KSP, я столкнулся с проблемой недостаточности наземных станций, решению которой в некотором смысле оптимальным способом и посвящен этот пост. Осторожно, длиннотекст! Если вам не интересно читать всяческие рассуждения, смотрите второй пост, с практической частью.
Если спутник находится достаточно далеко от Кербина (домашняя планета игры, аналог Земли), то с него видна примерно половина поверхности планеты. Поскольку на половине поверхности всегда есть наземная станция космической связи, то для обеспечения соединения с таким спутником ничего специального придумывать не нужно. А вот для аппаратов, находящихся близко к поверхности, потери связи (и, соответственно, потери управления - я использую повышенные настройки сложности, включающие в себя, в том числе, потерю управления при потере связи) случаются постоянно. И если для спутников на низкой орбите это неприятно, но не критично, поскольку обычно можно дождаться следующего витка для проведения маневра, то потеря управления при входе в атмосферу нередко приводит к быстрой незапланированной разборке аппарата или другим очень неприятным последствиям.
Собственно, задача системы ближней космической связи - сделать так, чтобы такой проблемы больше не возникало. То есть, обеспечить непрерывное покрытие 100% поверхности планеты. При этом хочется использовать минимально возможное количество спутников, а также минимизировать сложность развертывания системы.
Теоретические рассуждения.
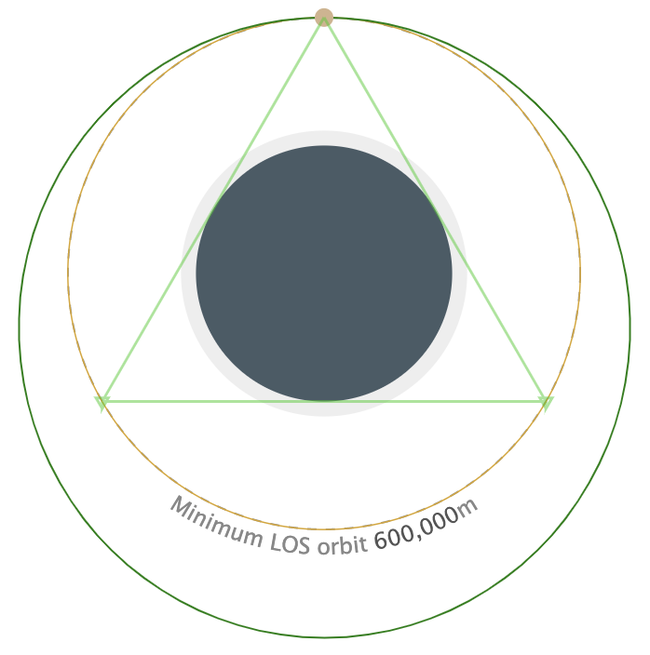
Покрыть всю поверхность планеты одним спутником, очевидно, нельзя - если он виден с одной стороны, то с противоположной виден не будет. С двумя спутниками уже есть более или менее рабочая схема - два спутника в противоположных точках очень высокой орбиты:

Как видно (надеюсь) на этой маленькой картинке, каждый из двух спутников обеспечивает связью почти половину поверхности планеты, и не покрытой остается только узкая полоса между этими половинами. В случае Кербина, учитывая радиус 600 км и сферу влияния 84159 км, минимальная ширина этой полосы получается около 0°48' или 1.3 км.
Добавив третий спутник, можно избавиться от этой полосы, оставив не покрытыми связью лишь небольшие участки у полюсов (картинка из Гугла):

Добиться лучших результатов с помощью трех спутников невозможно - три точки в пространстве всегда лежат в одной плоскости, так что хотя бы с одной стороны самая дальняя от этой плоскости точка планеты (и некоторая ее окрестность) покрыта не будет.
Учитывая, что на полюса всем обычно более или менее плевать, в реальной игре стоит использовать эту схему (или предыдущую, с двумя спутниками). Дешево, мало спутников, легко понять, легко реализовать, и вообще супер. А на полюса всем плевать, верно? В крайнем случае, если когда-нибудь в будущем перестанет быть плевать, можно будет добавить один или два спутника на очень сильно вытянутой полярной орбите - такой спутник будет больше 99% времени проводить в одном полушарии.
Но это не наш метод, он гарантий не дает. И вывести две такие тройки спутников (насколько я понял, эта модель была впервые предложена Роджером Истеном в 1969) в разные плоскости для гарантированного покрытия - тоже не наш, 6 спутников - это много.
К сожалению, у меня не получилось самостоятельно придумать созвездие из меньшего количества, которое бы гарантировало непрерывную связь на всей поверхности планеты (точнее, придумалось-то дофига, но все оказалось с ошибками, как показало моделирование). Поэтому я на эту тему погуглил. Пришлось затратить немало усилий, но они окупились, и вторая ссылка из поисковой выдачи привела меня к патенту номер 4,854,527 от 8 августа 1989 года (уже передан в общественное достояние), в котором есть ссылка на статью Draim J. E. Three-and four-satellite continuous-coverage constellations //Journal of Guidance, Control, and Dynamics. – 1985. – Т. 8. – №. 6. – С. 725-730. с хорошим обзором на эту тему. Собственно, как и стоило ожидать, NASA уже давно изучило этот вопрос.
В статье описывается достаточно простое созвездие из 5 спутников на синхронных орбитах (поскольку орбиты синхронные, показаны треки спутников на поверхности планеты, экваториальные спутники относительно поверхности не двигаются):
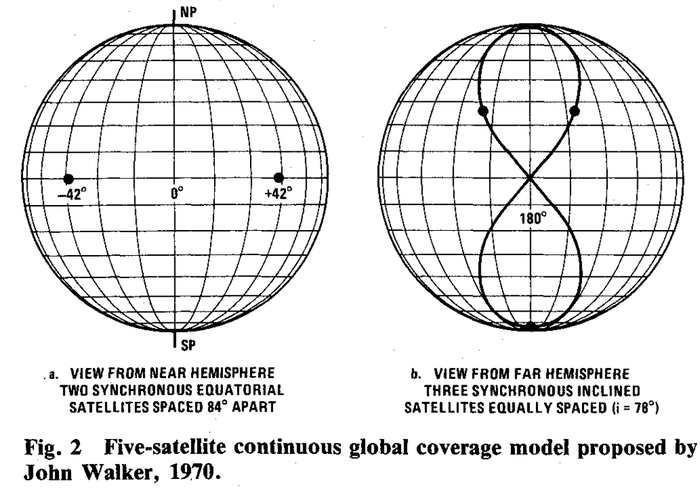
А также созвездие из 3 спутников, обеспечивающее постоянное покрытие одного полушария:

Оно интересно тем, что, с одной стороны, в статье приведены теоремы о том, что это созвездие оптимально (которые я не объясню, потому что не осилил, стереометрия - не мое), а с другой - для глобального покрытия достаточно всего 4 спутников аналогичным образом: по два спутника на наклонных орбитах для каждого из полушарий, а экваториальные не нужны, если есть спутники другого полушария. Не уверен, что удалось понятно описать, что за созвездие будем выводить, поэтому вот еще картинки из патента:
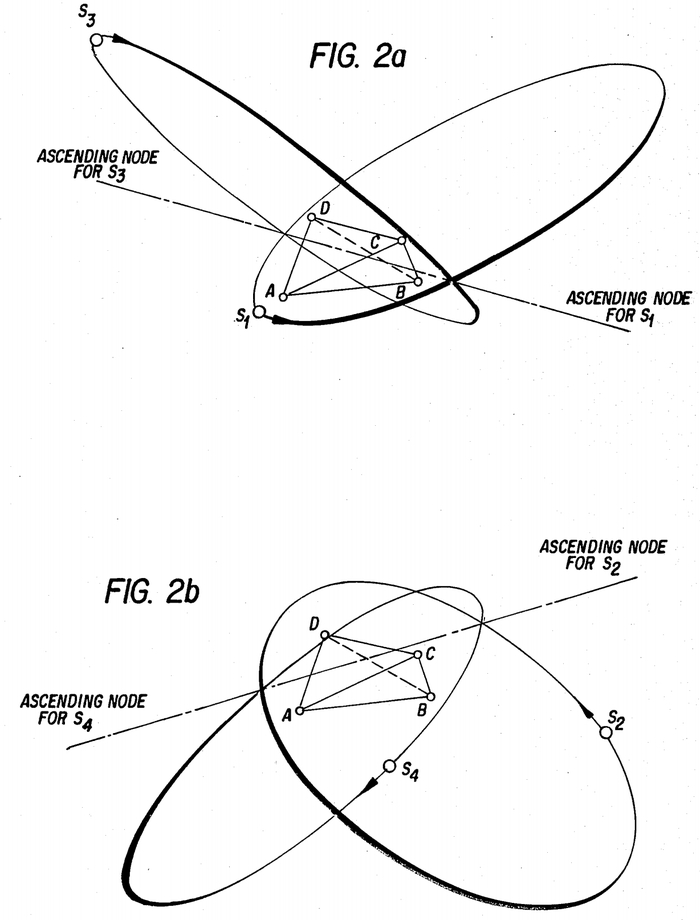
Спутники 1 и 3 обслуживают, преимущественно, северное полушарие, а 2 и 4 - южное. В один и тот же момент времени спутники 1 и 3 находятся с одной стороны от планеты, а 2 и 4 - с противоположной. Угол между любой из орбит и экватором (наклонение) - 33°, а эксцентриситет орбит (показывает, насколько орбита вытянута, для круговой равен 0, для орбиты убегания равен 1) - 0.28.
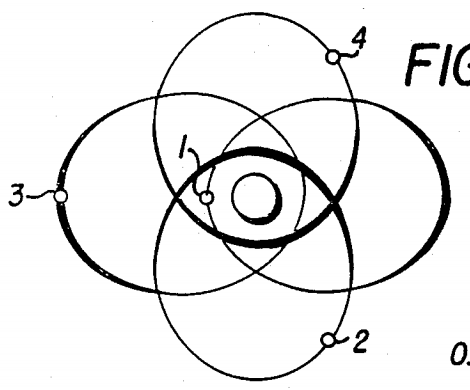
Полярная проекция. Долготы восходящих узлов орбит отличаются на 90°. Спутники 1 и 3 находятся с одной стороны орбиты, а 2 и 4 - с противоположной.
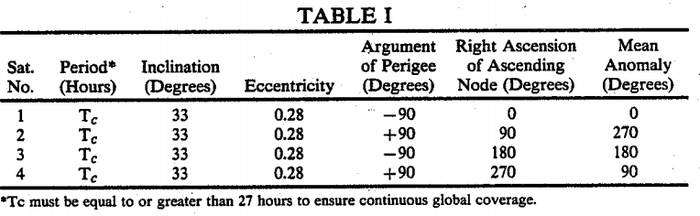
Параметры орбит спутников из патента. Обратите внимание, что периоды всех спутников одинаковые, но любые.
Более практические рассуждения.
Возвращаясь к нашим баранам, нужно выбрать оптимальную полуось орбит спутников, решить, как именно их на эти орбиты выводить, и построить спутники и ракету-носитель для них.
У нас есть одна-единственная степень свободы - это период (или полуось, поскольку период у всех орбит с одинаковой полуосью одинаковый) орбит. Полуось - это полусумма периапсиса и апоапсиса.

Эллипс - это орбита спутника. F₁ - центр планеты, слева - периапсис, справа - апоапсис. Большая полуось (или просто полуось) - а.
С одной стороны, хочется, чтобы спутники летали как можно выше - задержки сигнала в KSP нет, и для наличия управления достаточно просто наличия соединения. Зато более высокие орбиты спутников уменьшают требования Δv, поскольку требуется меньшее изменение наклонения (а это очень дорогая процедура, и она нам потребуется при запуске). Но главное даже не это, а то, что если спутники нашей системы связи расположены достаточно высоко, то увеличивается их высота над горизонтом. Соответственно, можно их менее точно выводить.
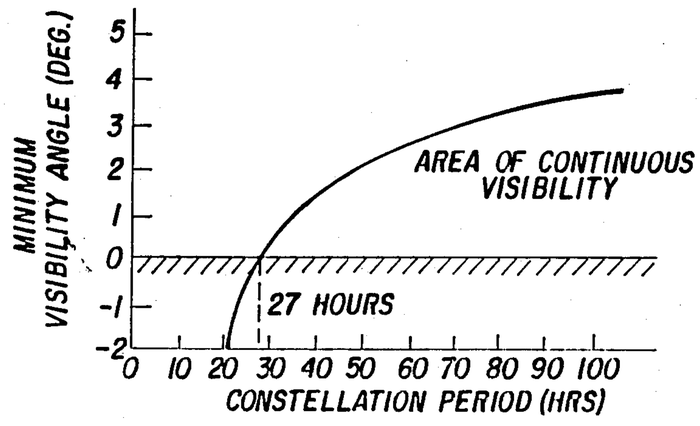
График из патента. По оси Х - период обращения спутников созвездия в часах, по оси Y - минимальный угол над горизонтом. График приведен для Земли, в случае Кербина несложная математика дает нулевой минимальный угол при полуоси 4350 км.
С другой стороны, если спутники находятся слишком высоко, то у космического аппарата может не хватить мощности антенны для связи со спутником созвездия. Учитывая, что я хочу обеспечить связь раз и навсегда, исходим из предположения, что у космического аппарата нет антенн, кроме встроенной маломощной. При моих настройках максимальное расстояние, на котором возможна связь между встроенной антенной и релейной антенной максимальной мощности (которую мы будем использовать для спутников связи) - около 15 тысяч километров. Учитывая, что это ограничение на апоапсис, получаем, что полуось должна быть не больше 11278 км.
С третьей стороны, в игре у Кербина есть спутник - Муна, и нужно, чтобы она не мешала. Если бы наше созвездие располагалось достаточно высоко, то нужно было бы синхронизироваться с Муной во избежание затмений спутников ею (мы же хотим постоянное покрытие!). Но учитывая, что наше созвездие находится не слишком высоко, а как раз где-то около орбиты Муны (полуось ее орбиты - 12000 км), нам нужно также убедиться, что спутники никогда не окажутся достаточно близко к Муне, чтобы она повлияла на их орбиты (в реальности это невозможно, и пришлось бы просто располагать спутники, по возможности, пониже, и корректировать их орбиты, но в игре, с ее концепцией "зон влияния", это достижимо).
Учитывая, что мы хотим как можно большую полуось, синхронизировать спутники с Муной точно не получится, так что просто найдем максимальную полуось, при которой эллипс орбиты (с учетом наклонения) и тор зоны влияния Муны не пересекаются. Путем нехитрых расчетов у меня получилось, что максимальная возможная большая полуось орбиты немногим меньше, чем 10200 км. Округлим вниз на всякий пожарный, и будем выводить наше созвездие на орбиты с большой полуосью 10100 км.
Теперь, когда принято решение о том, на какие именно орбиты выводить эти спутники, нужно решить, как это сделать. В реальном мире спутники связи обычно запускаются небольшими группами. Здесь же запускать спутники по два было бы вряд ли сколько-нибудь удобно, поэтому нужно запускать их по одному или все вместе. Поскольку я сомневаюсь в своих способностях по точному выводу спутников на орбиты, будем запускать их все вместе - гораздо проще добиться правильного расположения спутников относительно друг друга, если в начале пути их позиции совпадали.
Спутники хочется запускать следующим образом:
1. Запуск на низкую экваториальную орбиту (атмосфера Кербина полностью заканчивается на 70 км, так что спутники могут летать на высоте около 80 км, с учетом небольшого запаса высоты на всякий случай).
2. Повышение апоапсиса для выхода на орбиту, переходную к резонансной. Ее периапсис находится низко (на тех же 80 км, грубо говоря), а апоапсис совпадает с апоапсисом резонансной орбиты.
3. Переход на орбиту, резонансную к опорной, посредством повышения периапсиса. Резонансная орбита - это орбита, одна из точек которой совпадает с целевой, а период обращения на которой соотносится с периодом обращения на целевой орбите заданным образом - например, как 9 к 8.
4. Последовательное отделение каждого из 4 спутников системы связи от ракеты-носителя. Каждый из спутников отделяется в той точке резонансной орбиты, которая совпадает с опорной, и сразу же переходит на опорную орбиту. Поскольку период резонансной орбиты больше, чем период опорной, таким образом мы получаем четыре спутника, расположенные на одной и той же опорной орбите, через равные промежутки. А длину этого промежутка можно регулировать изменением отношения периодов резонансной и опорной орбит.
5. Каждый из 4 спутников, с разницей в 90 градусов дуги, изменяет наклонение своей орбиты на 33°. После этого этапа все орбиты находятся в нужных плоскостях, и остается лишь изменить их апоапсис и периапсис.
6. Изменение периапсиса орбит спутников.
7. Изменение апоапсисов орбит спутников.
8*. Возвращение ракеты-носителя на Кербин. Мы же не хотим оставлять космический мусор, верно?
Шаг 4 - это стандартная процедура вывода нескольких спутников на одну и ту же круговую орбиту. Например, если мы хотим вывести три спутника на желтую орбиту на картинке выше. Что мы делаем? Мы выводим ракету-носитель с тремя спутниками на борту на зеленую орбиту. В точке пересечения орбит (на картинке - желтый круг сверху) один из спутников отделяется и немного тормозит, переходя на желтую орбиту. К тому моменту, когда ракета-носитель сделает один полный оборот по зеленой орбите, спутник сделает 4/3 оборота и окажется в левой точке, отмеченной треугольником. В этот момент мы отсоединяем второй спутник - он тоже тормозит, переходя на желтую орбиту. Еще через оборот, аналогичным образом, отсоединяем третий спутник.
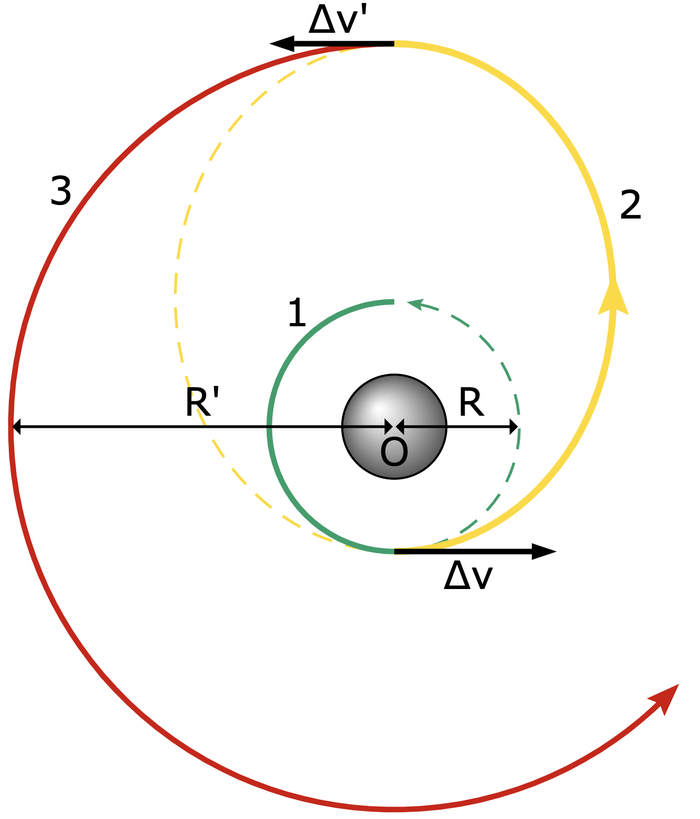
Шаги 2-3 и 6-7 - это стандартный Гомановский переход между орбитами. Представим себе, что мы хотим перейти с зеленой орбиты на рисунке выше на красную. Как это сделать? Сначала ускоримся на Δv и тем самым перейдем на желтую орбиту (апоапсис которой совпадает с апоапсисом красной), а потом выполним второе включение двигателя, ускорившись еще на Δv', и тем самым перейдем на красную орбиту. Эта вся схема была придумана Гоманом ещё сто лет назад. Она является оптимальной для случая, если начальная и конечная орбиты отличаются не слишком сильно (а если сильно, то она начинает проигрывать бипараболической траектории по требуемому изменению скорости, но разница там буквально в единицы процентов, и она обычно не стоит увеличения продолжительности полета).
Остаётся самое главное: определить высоту опорной орбиты в алгоритме выше. Хочется, чтобы она была в резонансе с целевыми орбитами спутников - разные спутники созвездия проведут на опорной орбите разное время, и хочется упростить математику вычисления их относительных сдвигов. Идеальным вариантом, конечно, стала бы опорная орбита с той же самой полуосью, что и орбиты спутников - в этом случае их относительные позиции вообще не будут меняться с течением времени, и на опорной орбите можно будет болтаться сколько угодно. Но, к сожалению, этот вариант нам не подходит - эта орбита пересекает область влияния Муны, и болтаться на ней придется достаточно долго, чтобы Муна в любом случае успела нас поймать. Поэтому берём следующий вариант - резонанс 2:1, то есть, период опорной орбиты вдвое больше, чем периоды орбит спутников. Ее полуось при этом получается равной 16032.751 км. На этой опорной орбите наши спутники нужно расположить с разницей в 45° - они превратятся в 90° задержки на более низкой орбите (целевой), и еще столько же набежит за то время, на которое спутник дольше находится на опорной орбите. В итоге - одна пара спутников находится с одной стороны от планеты, другая - с другой, как и написано в патенте.
В общем, собираем все в одну кучу и добавляем немного расчетов для определения Δv.
1. Вывод ракеты-носителя со спутниками на борту на низкую экваториальную орбиту Кербина (80 х 80 км). Требуемая Δv для типичной ракеты - около 3400 м/с. Еще около 800 м/с накинем на компенсацию аэродинамического сопротивления, все же, мы выводим на орбиту целых четыре спутника с огромными антеннами.
2. Переход на переходную орбиту 80 х 18052.091 км. Δv около 887 м/с.
3. Переход на резонансную орбиту 15432.751 х 18052.091 км. Δv около 303 м/с.
4. Каждый раз в периапсисе отделяем один из четырех спутников. Спутники скругляют орбиту до опорной высотой 15432.751 км. Δv около 17.4 м/с.
5. Изменение наклонения орбиты каждого из четырех спутников до 33°. Δv около 266.6 м/с.
6. Переход на переходную к целевой орбите 6672 х 15432.751 км для каждого из четырех спутников. Δv около 98.6 м/с.
7. Переход на целевую орбиту 6672 х 12328 км для каждого из четырех спутников. Δv около 29 м/с.
8. Возвращение верхней ступени ракеты-носителя с использованием гравитационного маневра у Муны. Грубо можно оценить в 30 м/с, но, пожалуй, накинем еще столько же на всякий случай - мало ли, какие еще коррекции где потребуются.
Итого получается, что нам нужно 5450 м/с изменения скорости у ракеты-носителя и около 400 м/с у спутников.
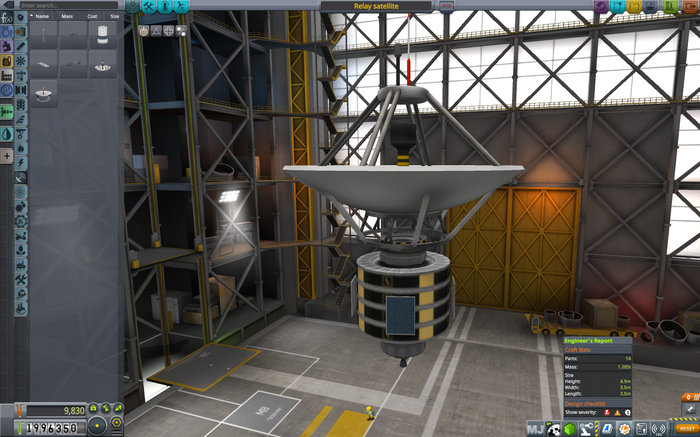
Внешний вид каждого из четырех спутников. Каждый спутник состоит из самой большой антенны, самого маленького (а значит, легкого) управляющего модуля, маленького гироскопа для ориентации, четырех больших аккумуляторов (столько нужно для передачи максимального количества науки с научной лаборатории, вряд ли за один раз мне потребуется больше, а до следующего сеанса передачи данных успеем накопить заряда), четырех небольших солнечных батарей, самого маленького топливного бака и самого маленького двигателя. Очень важно выбрать именно самый маленький двигатель, чтобы достичь требуемой точности расположения спутников. Запас изменения скорости в такой конфигурации получается 519 м/с - немного больше, чем нужно, так что будет запас на всякий случай.
Оказывается, на пикабу есть ограничение в 51 блок на пост. Поэтому непосредственно полет будет размещен в отдельном посте.
NathanKell сделал заявление , в котором он прощается с комьюнити от своего лица и лица ещё 7 разработчиков, в числе которых Mike (Mu), Bill (Taniwha), Sébastien (Sarbian), Jim (Romfarer), Brian (Arsonide), Chris (Porkjet), Nathan (Claw). Эти разработчики решили уйти из SQUAD после работы над версией 1.2.
https://www.reddit.com/r/KerbalSpaceProgram/comments/55vozd/...
По информации из источника близкого к SQUAD это связано с "проблемами с менеджментом" и "неустойчивыми условиями труда".
http://www.pcgamesn.com/kerbal-space-program/ksp-developers-...
Также, по неподтверждённым данным, ушедшим разработчикам уже сделано предложение о работе на НАСА.
https://www.reddit.com/r/KerbalSpaceProgram/comments/55vozd/...
Судьба модов, разрабатываемых NathanKell и Porkjet, пока неизвестна, но, судя по всему, как минимум перерисовка частей от Porkjet заморожена, в связи с тем, что это планировалось включить в один из будущих патчей.



