


Сделал пульт для симулятора
Сделал пульт. Чтобы летать в симуляторе квадрокоптера. И вы можете сделать. Подписваетес миэнэ арык, сделаю еще пульт.

Показать полностью
2
1
Сделал пульт. Чтобы летать в симуляторе квадрокоптера. И вы можете сделать. Подписваетес миэнэ арык, сделаю еще пульт.
Всем привет! Сегодня у меня для вас проект первого действующего марсохода под названием Соджорнер!
Я задался целью со временем собрать радиоуправляемые модели всех существовавших и существующих планетоходов, и начать решил именно с этого. Просто потому, что это единственных из них, который я могу собрать в масштабе 1:1. По крайней мере, на данный момент =)
Ссылка на страницу проекта – тык. Тут все 3D модели, чертежи и список комплектующих со ссылками.
Видео по сборке в трёх частях:
Если ютуб уже не работает, можно посмотреть на Дзене.
Все печатные детали напечатаны PLA пластиком от Bestfilament. Заполнение для колёс стоит выставить минимальное, в районе 10%. Для декоративных деталей, вроде камер и спектрометра – по усмотрению, там много не надо. А вот для ступиц, рычагов подвески, хаба и его основания – 50–75%. Для печатных деталей корпуса (уголков) достаточно 30%.



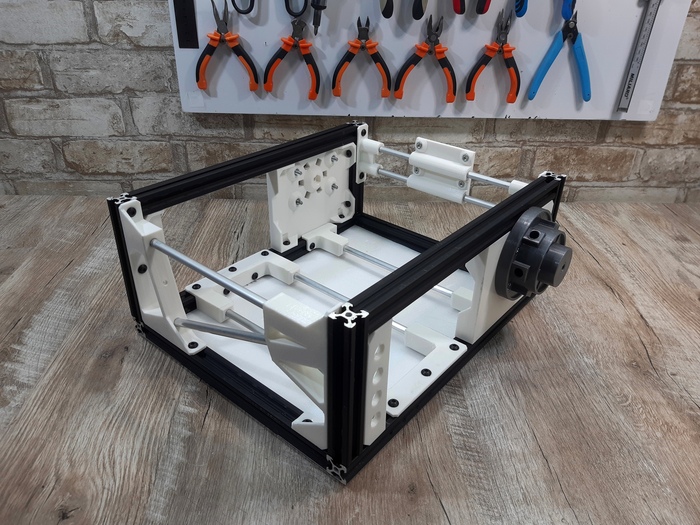
Каркас собрал из алюминиевого конструкционного профиля сечением 20х20 миллиметров, печатных деталей, и 8 мм. алюминиевых трубок (профиля было маловато в наличии).

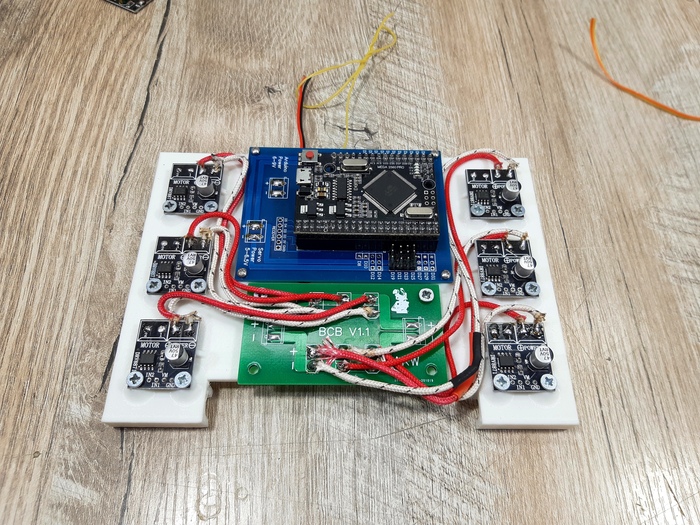
Для привода использовал 6 мотор-редукторов JGA25-370. Изначально проект планировался несколько иначе. Настоящий ровер был очень медленным, а я хотел сделать модель очень быстрой. Потому планировался очень лёгкий каркас, а вместо солнечной панели был бы муляж. Но когда я уже взялся за эту штуку, то понял, что это не серьёзно. В результате модель получилась раза в 3 тяжелее. Это стало проблемой, потому что к тому времени я уже купил движки на 915 оборотов в минуту. Крутящий момент у них всего в районе 200 грамм. В первых двух видео ровер гонял именно на них, но мог делать это только по относительно ровной поверхности. Потому позже пришлось их заменить на аналогичные, но менее оборотистые, на 60 об\мин – меньше оборотов, больше крутящего момента.




Управляется эта штука посредством стандартной аппаратуры управления, приёмник которой подключается к Arduino 2560 PRO по PWM. Мне пришлось самому писать программу управления этой штукой, которая сводится, по большей части, к управлению передними и задними колёсами. И я выбрал именно ШИМ, потому что в отличие от протоколов SBUS, IBUS и прочих, ШИМ поддерживается любой аппаратурой управления.
Аккумулятор собран из трёх элементов Swing 5300. Вместо них можно использовать 6 обычных 18650, собрав таким образом 3S2P аккум.

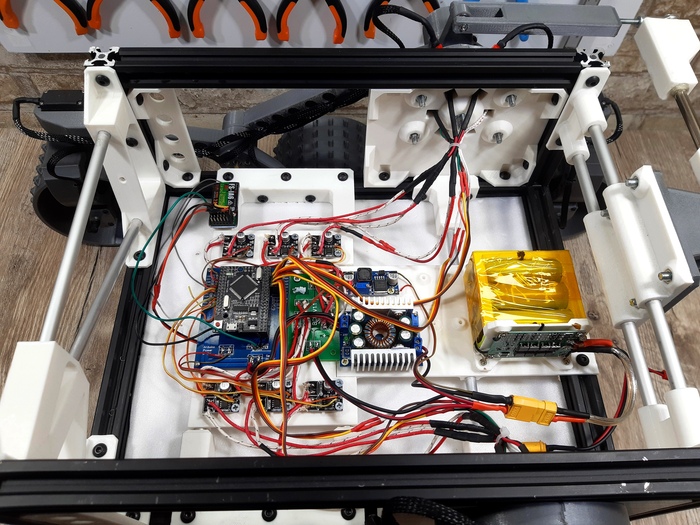
Солнечная панель собрана из 72 элементов. Каркас вырезан из оргстекла. В качестве основы для элементов я попробовал использовать печатные платы, изготовленные на заказ у JLCPCB. И что-то в этом определённо есть, так можно минимизировать весь солнечных панелей. Буду дальше работать в этом направлении. Ровер был собран зимой, так что её толком ещё не тестил, жду лета.





В общем, как то так. Проект, на мой взгляд, получился очень интересным. Следующими на очереди будут скорее всего марсоход Perseverance, проект которого уже существует, и советский Луноход-1, проект которого нужно будет создавать самому, как и этот.
Спасибо, что дочитали до конца =)
Ещё несколько фото ровера напоследок:





В детстве занимался в кружках, как итог КМС по бальным танцам, шахматы, программирование, компьютерная графика, акробатика, введение в интернет технологии (2005 год), судомоделироаание, авиамоделирование.
Как результат 6 лет после школы не мог найти чем заниматься, так как умел все по чуток. Но в итоге стал оператором постановщиком
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
С коллегами посетила мысль создать сообщество работников и владельцев "кружов и различных секций" с техническим уклоном для обмена опытом, работы свои показать, мастерские. Принести что то новое и интересное на пикабушечку.

Пишите в комментах что интересно было бы узнать о работе таких организаций, что вообще в этом мире происходит, есть что рассказать.
будем рады.

Можем рассказать о различных форумах и мероприятиях для молодежи, что делает государство, что делают люди.

Мы за творчество и науку,

Голосом Игоря Негоды- НИТРО МЕТАН!!

Так же хотелось бы сказать спасибо!
@Diaver, @KzTcH, @K715, @Nashatirko Спасибо всем кто принимает участие в нашем развитии. Отдельное огромное спасибо производителю пластика для печати @Syntechlab .Ребят скоро буду начинать серию постов по вашим ТДМ, идет активная подготовка.
В память о Косте Танкове.
Пикабу, привет!
Вот уже года два с перерывами я собираю один проект на базе Arduino, а именно RC модель на WI-FI управлении, но как и в любом деле встречаются трудности.
Вообщем, в состав моей RC машинки входит:
●сервопривод sg90,
●arduino wemos d1 mini,
●драйвер двигателя
●130 электро двигатель
Сама схема:
Само управление происходит с помощью мобильного приложения REMOTE XY
Суть проблемы:
Ни в какую не хочет работать сервопривод, абсолютно не подает никаких признаков жизни, в то время как вся остальная аппаратура исправно работает. Грешу на китайцев, что может они прислали брак, а может и я так криво спаял, а может и ардуинка не пашет, а может я входы на ардуино перегрел и сжег как раз таки входы для сервы, а может, а может все что угодно... Я в этом не очень силен, но закончить дело мне нужно все таки были потрачены деньги на остальные комплектующие, а без решения этой проблемы они абсолютно не нужны.
P.S. Если реально заморочитесь и поможете, скину на хлеб, честно.
Всем привет.
Недавно получилось вернуться к своему проекту. Но возникли проблемы. Подскажите, пожалуйста, в чём может быть причина именно? Чтобы не повторять таких ошибок далее.
Аккумулятор и контроллер для двигателей пришли весной, тогда же и пробовал. Всё работало нормально. Вчера смог вернуться к проекту, запрогал заново (рабочий код перед включением случайно заменил, пришлось заново делать. Но код простой, в нём проблем быть не должно).
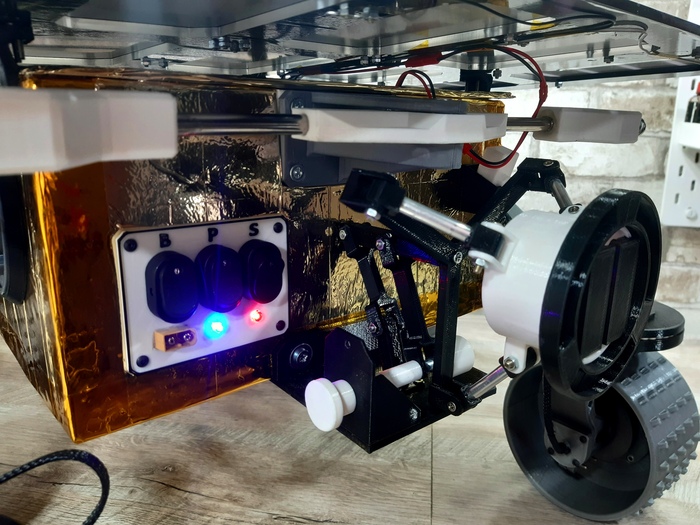
Всё подключил и попытался покататься - возникли проблемы. У танка было немного неадекватное поведение (среди прочего был разный ход гусениц) в ответ на управление. И в итоге неслабо задымился один из двигателей.
Отключил, подумал, включил заново под камеру. Но дыма уже не было.
Левый двигатель не работал и не грелся. Правый работал в обычном режиме.
Подключил двигатели вместо друг друга. И как только подключил, правый начал сам вращаться. И делал это рывками, как на видео ниже. Но при передаче команд исправно выполнял их. А левый так же не работал. Не сказал бы, что был особый нагрев у правого двигателя, по крайней мере не такой быстрый, как был у левого.
Так же при резкой смене направления проскакивают искры на двигателе. Насколько это может быть вредным? Да, я планирую программно сделать более плавный разгон и торможение, но на стадии тестов не запаривался с этим ещё.

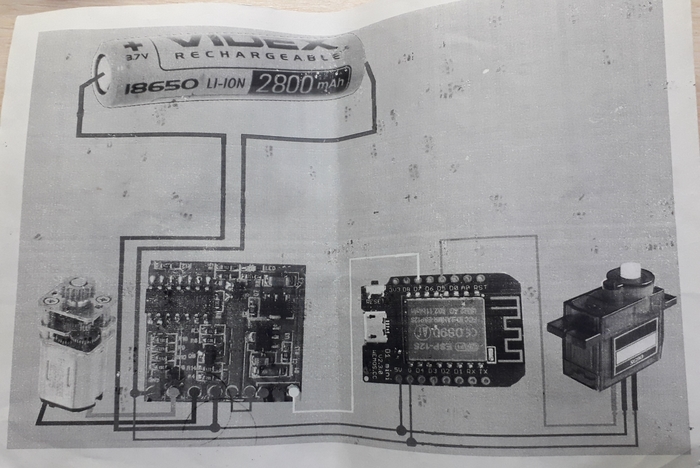
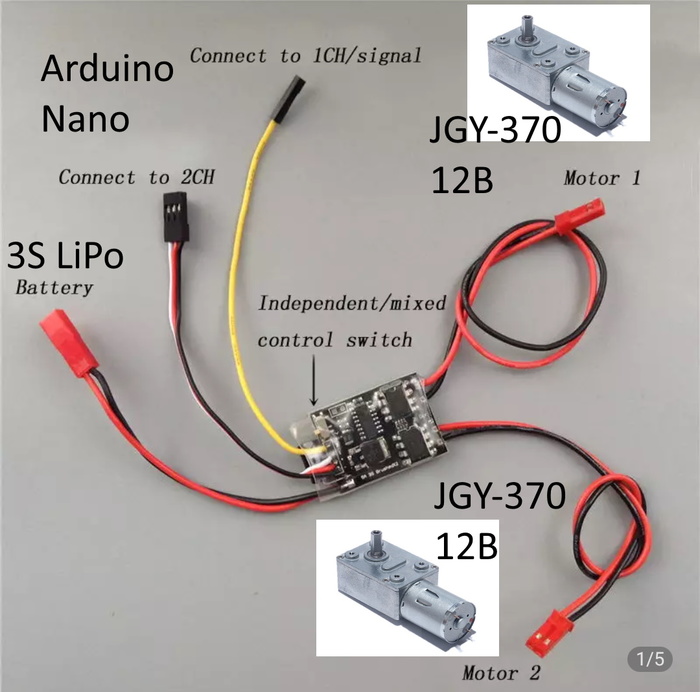
Самое обидное, что всё максимально просто устроено. Взял обычный контроллер двигателей, пару двигателей на 12 вольт, 3s LiPo батарею и Ардуино Нано с nrf24l01 (с кондёром) модулем. Подключил как на схеме ниже. То есть и перепутать что-либо сложно, и подключены совместимые (вроде как) вещи. Но двигатель сгорел. Заказать новый закажу (и контроллер, видимо), но только после выяснения причины. Иначе снова всё сгорит и всё.
Прошу совета. Заранее спасибо!
Всем привет! Решил написать продолжение про самолёт из протолочки. Начало тут: https://pikabu.ru/story/gotovimsya_k_poletam_vo_vremya_covid19_8180292?utm_source=linkshare&utm_medium=sharing

Начну со схем.
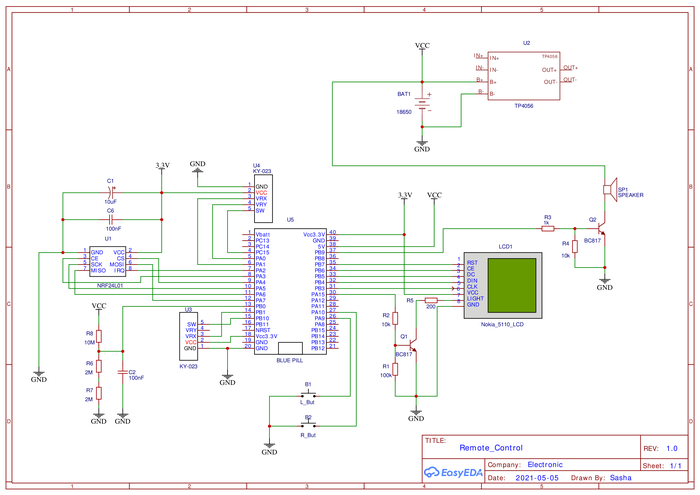
Схема подключения приемника:
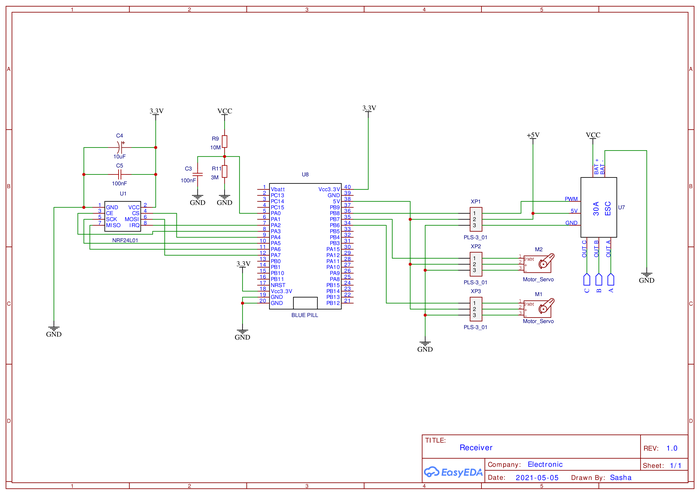
Здесь к blue pill подключается радиомодуль, контроллер двигателя и две сервомашинки. Аккумулятор подключается к контроллеру управления двигателя, на нем стоит стабилизатор на 5 вольт, с которого берется питание для управляющей электроники. Сервомашинки также запитываются с этих 5 вольт. Радиомодуль питается от +3,3 вольт со стабилизатора blue pill. Здесь имеется делитель напряжения, который подключен к аккумулятору, для контроля его напряжения. Информация шлется на пульт управления.
Сам приемник:
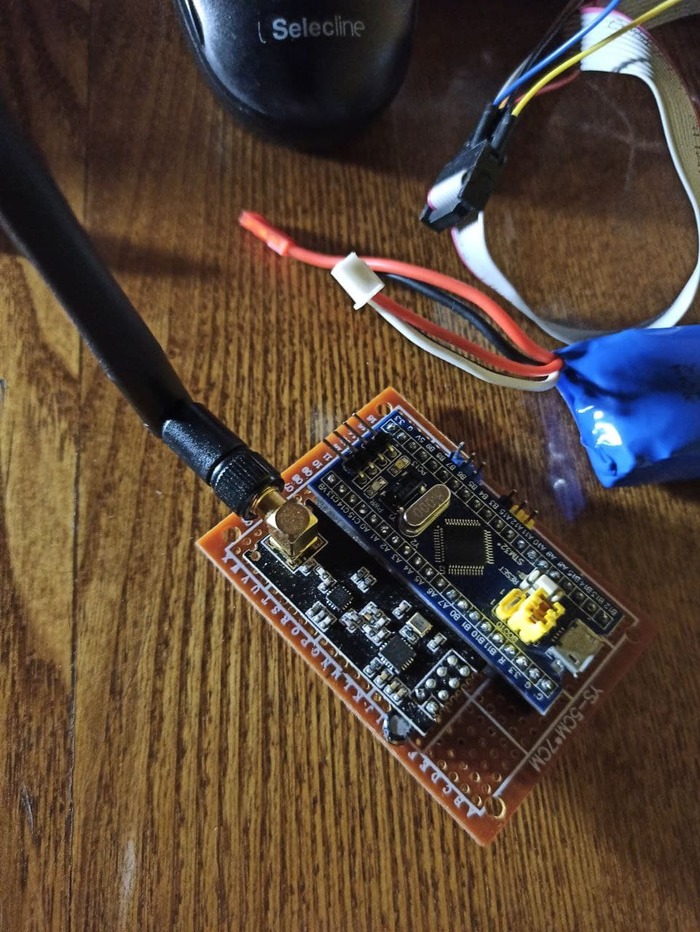
Программа для приемника: тут
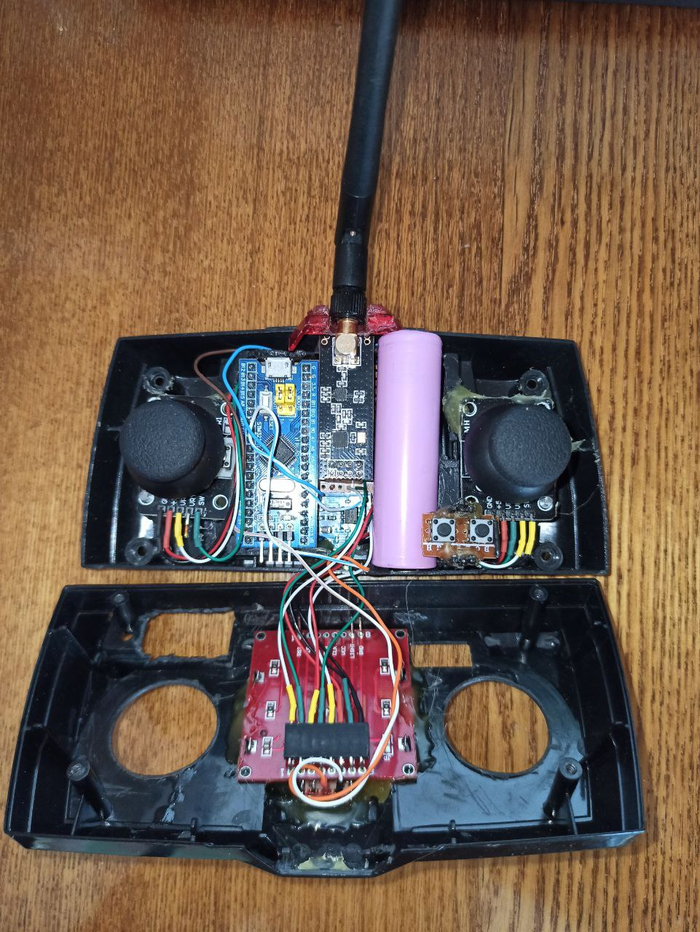
Схема подключения пульта управления:
Здесь чуть побольше компонентов. Аккумулятор подключается на порт +5 вольт blue pill. Для зарядки аккумулятора к нему подключен модуль зарядки. С blue pill при помощи 3,3 вольт запитывется экран, радиомодуль, джойстики. Потенциометры джойстиков подключены к каналам АЦП blue pill, их тактовые кнопки и остальные две подключены на остальные порты в режиме вход.
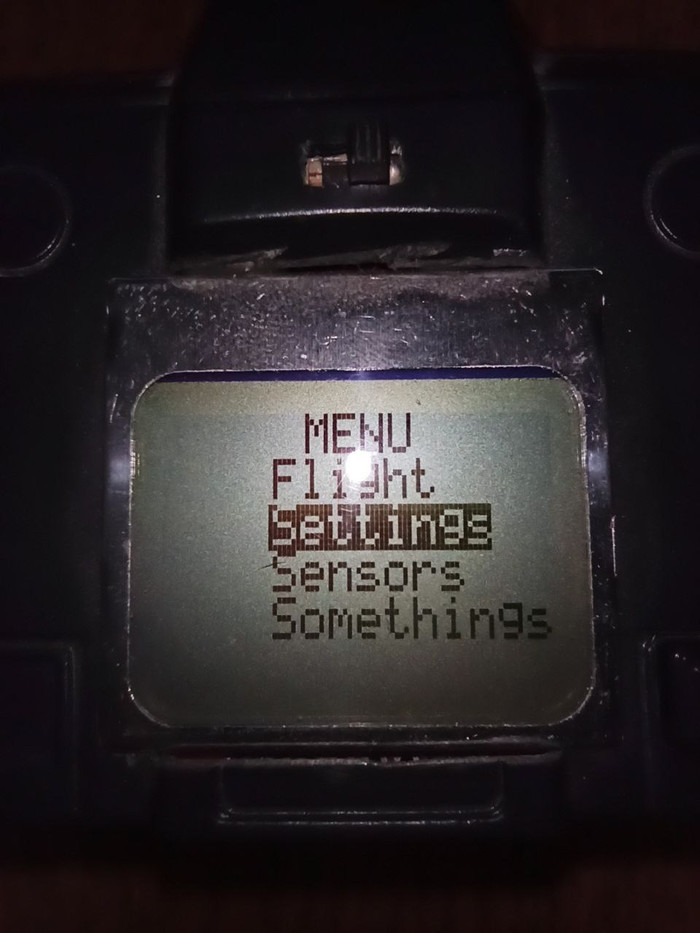
Пульт управления внутри:

В меню пульта 4 строки: 1 строка - это режим полета, во 2 строке просто отображаются данные АЦП и т.д. в 3 строке настраиваются чувствительность рулей и субтример (начальное положение элевонов), в 4 строке ничего нет (можно добавить).
Нажатие правого джойстика - переход на одну строку вниз, левый - на одну строку вверх, нажатие одновременно двух джойстиков заходит в подменю выбранной строки, аналогично производится выход. Две другие кнопки используется для настройки чувствительности в меню строки Sensors, их одновременное длительное нажатие, в любом нахождении меню, включает подсветку. В режиме полета нажатие любого из джойстиков активирует работу двигателя или дективирует, чтобы при заходе в режим полета двигатель не работал сразу и случайно не отпилить себе пальцы винтом не поранил крутящим винтом.
При отключении пульта во время работы приемника, через 2 секунды отключается двигатель.
Расскомментировав эти строчки в main.c (до надпсиси END OF DEBUG_RC OUT):
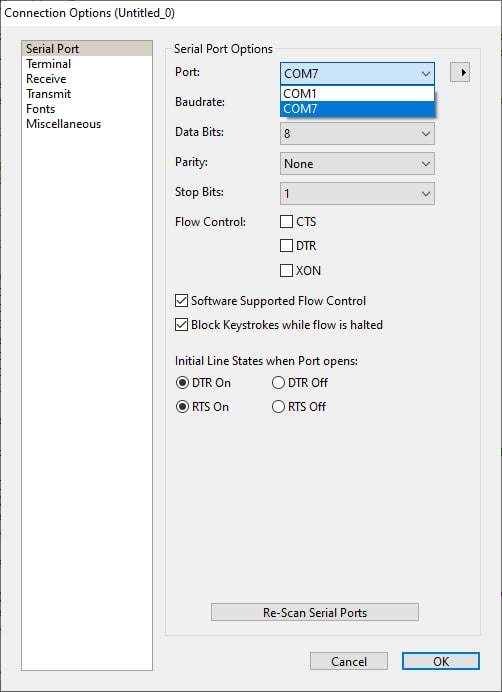
пульт можно подключить по USB к ПК при помощи любой Terminal программы (я пользовался CoolTerm), в которой нужно выбрать COM порт и присоединится к blue pill:
и в окне получить информацию о подключении радиомодуля:
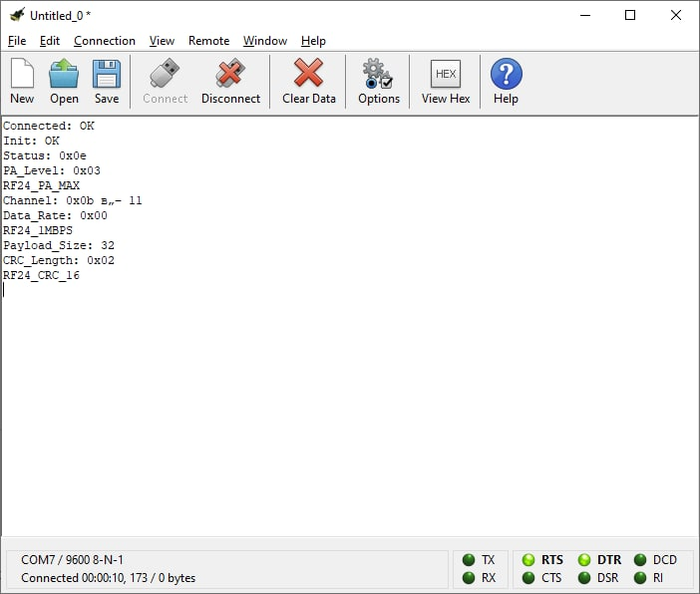
Считывая установочные данные, записанные в регистры радиомодуля, можно убедиться, что модуль работает и данные совпадают с установленными. В данном случае я получил статус работы радиомодуля, его мощность передачи (максимальная), номер канала (11), скорость передачи (1 Мбит в секунду), размер передаваемого пакета (32 байта - максимальный) и количество бит контрольной суммы (в моем случае 16 бит). Если модуль не подключен или неисправен в терминал выводит такое сообщение:

Зайдя сюда в подменю Settings:
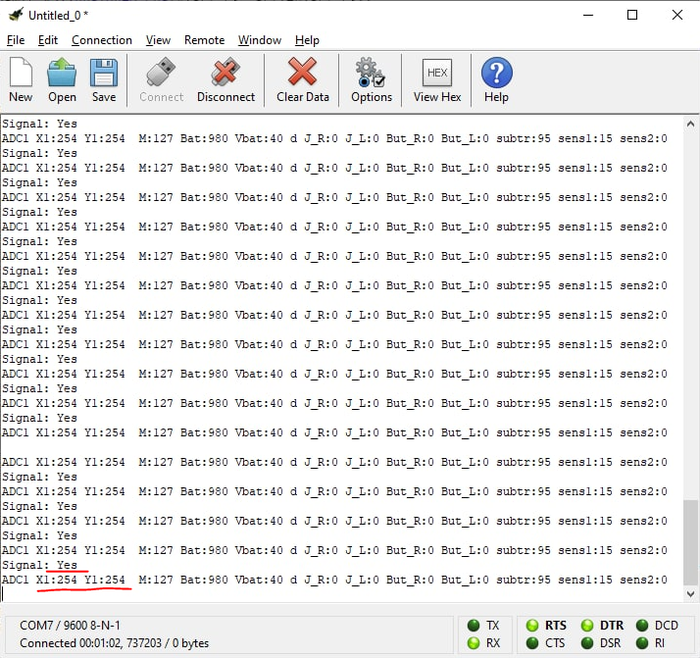
в терминал посыпятся такие строчки:
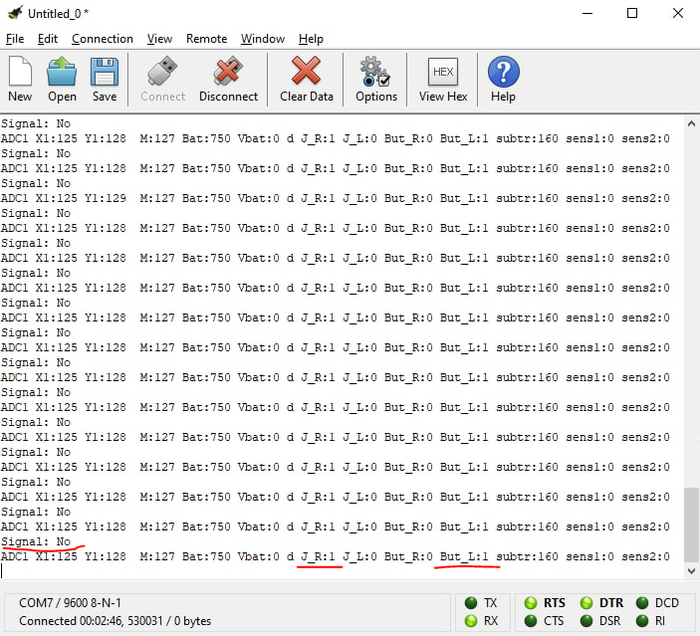
Здесь данные в таком порядке: X1: значение c АЦП правого джойстика по вертикали, Y1: значение c АЦП правого джойстика по горизонтали, значение с АЦП левого джойстика, которым управляется двигатель, значения только по вертикали, далее напряжения аккумулятора пульта, напряжения аккумулятора на приемнике, значение кнопки правого джойстика, значение кнопки левого джойстика, значения кнопок что находятся справа на пульте, субтример, чувствительность 1 и 2 (2 не используется), а также статус связи с приемником.
Как видно сигнала нет, так как примник был отключен. Также я зажал кнопку правого джойстика и просто левую кнопку, они выдают "1".
Включаю приемник и перевожу правый джойстик в правый верхний угол:
получаю сообщение что сигнал есть, а данные джойстика показывают максимальные значения.
АЦП на Blue Pill имеет разрешение 12 бит, максимальное значение котрого 4095, но в терминале видно, что оно 255, все потому что я 12 бит перевел в 8 бит (1 байт), так как один элемент массива передоваемого пакета равен 1 байту, чтобы одним байтом можно было слать значения одной из осей джойстика.
Аналогичным образом можно подключить приемник к ПК, узнать статус радиомодуля и получаемые данные с пульта, в main.c расскомментировав эти строчки:

Использовать джойстики для управления в таких проектах, вместо нормальных стиков не очень хорошо. Во-первых, для управления газа стик должен сохранять свое положение, а не быть подпружиненным и возвращаться на середину, убрать эту пружинку в джойстика очень проблемно, но я думаю можно. Во-вторых, это должны быть стики, так сказать длинные палочки, для более плавного и точного управления за счёт отдаления пальца от центра потенциометра или увеличения радиуса, это можно решить, наколхозив что-то длинное на джойстики. Специальные стики заточены именно под это, что нельзя сказать про джойстики, но на них цена уже совсем другая, например: стик FlySky.
Крыло сложно в управлении (по-моему мнению) по сравнению с моделями, имеющими хвост со стабилизатором и килем.
И наконец, то, чего мы так долго ждали!!! Видео полетов. К сожалению, видео очень короткое, так как полет был недолгий.
В ВИДЕО ПРИСУТСТВУЕТ ПАРУ ПЛОХИХ СЛОВ!
В заключении хочу написать, что это был мой первый опыт постройки подобной игрушки.
Самолёт полетел вполне уверенно, но что-то пошло не так, если честно, я не понял в чем причина, может это из-за джойстиков или все-таки конструкция крыла. Я думаю, что на этом я не остановлюсь и попробую как-нибудь еще, пересмотрев ошибки.
Всем спасибо!
Ссылки на товары которые я использовал:
Отладочная плата Blue Pill
Радиомодуль
Программатор St-Link
Набор из контроллера, двигателя винта и сервомашинок
Джойстики
Стики от FlySky
Модуль зарядки
Макетная плата
Экран от Nokia 5110
Тактовые кнопки
Аккумулятор
Для всех поклонников футбола Hisense подготовил крутой конкурс в соцсетях. Попытайте удачу, чтобы получить классный мерч и технику от глобального партнера чемпионата.
А если не любите полагаться на случай и сразу отправляетесь за техникой Hisense, не прячьте далеко чек. Загрузите на сайт и получите подписку на Wink на 3 месяца в подарок.

Реклама ООО «Горенье БТ», ИНН: 7704722037
Добрый день.
Конструирую один танк. Дошёл до этапа тестирования ходовой. Всё ездит, всё хорошо. НО есть проблема. Иногда плата зависает и танк продолжает движение. Помогает лишь перезагрузка платы. Сначала казалось, что проблема только при движении назад направо. Но когда снимал видео, то проблемы повторились и при движении в других направлениях. При том разок (первое зависание на 6 секунде, второе на 11) даже отвис.
Конструктивно всё просто. Стоит ардуино нано с модулем nrf24l01, аккумулятор и контроллер двигателей. Программно тоже просто - считываю переменную с показаниями джойстика, а потом преобразовываю и конструкцией из нескольких if - else if определяю что и куда подавать.
Думал либо помехи, либо код. Но вспомнил, что в предыдущем танке была такая же проблема. А там и код другой, и конденсаторы ставил, и конструкция в целом отличается.
Подскажите, пожалуйста, в чём может быть причина? Если всё же помехи с питания (разве контроллер двигателей не должен их устранять?), то как лучше от них избавиться? Просто подбором конденсаторов? Но как тогда определить какие именно конденсаторы нужны? Моторы на 12 вольт (понимаю, что кондёры должны быть от 12 и выше), питание Li-Po 3S. Пытался гуглить, но в основном говорят брать просто как можно больше. И всё.
Ёмкость и тип конденсаторов подобрать думаю как. А если не в помехах дело, то в чём может быть ещё?
Код приёмника https://ideone.com/6R3kkS
Код передатчика https://ideone.com/SXeR6W
Upd 2: Не хочу торопить события, но (кажется) проблема решилась конденсатором на модуль nrf24l0. Всем большое спасибо.
P.S. Опять же, не уверен правильно ли указал сообщество.






