


Обучающие видеоролики по Blender-у
3 поста
3 поста

5 постов
Всем привет!
Сегодня поговорим, о таком замечательном и невероятно доставляющем офигенные ощущения процессе как - Манёвр перехвата и стыковка в Kerbal Space Program. Если вы умеете стыковаться не переходя в режим докинга, скорее всего этот пост не для вас. В посте я максимально просто и доступно постараюсь разложить самый легкий метод стыковки и уверяю вас, если вы ранее сами не стыковались, процесс доставит вам недюжее удовольствие (с 12 года играю, до сих пор нравится стыковаться)
Краткое содержание следующее:
- Строим две простеньких одинаковых ракеты которые запустим в космос на разные орбиты.
- Взлетаем
- Формируем точку перехвата (Рендеву)
- Стыкуемся
Выглядит достаточно просто, особенно если никогда в KSP не играли (но по факту это не совсем так) :)
Давайте по порядку.
Аппарат:
Повторить его максимально просто.
Легкая посадочная рубка (у нее самый большой запас монотоплива из всех простых кабин), над ней гиродин и порт для стыковки средний.
Для обучения может понадобиться много монотоплива, поэтому поставьте несколько баков типа "ПЕЛЬМЕНЬ" или других. Забегая вперед скажу, что на стыковку мне потребовалось где-то 8-12 ед. монотоплива, но возьмите с запасом около 50-100.
Далее вниз ставим стандартный карандаш (бак на 4.5 т. веса) и полукарандаш (2.25 т.) далее вертлявый LVT 45.

Боковые ступени легче всего сделать из 1 карандаша и 1 вертлявого LVT 45. Размещать лучше всего на длинный вертикальный сепаратор (ТТ-70) по 2-ой (не 4-ой) симметрии и включать пропуск ресурсов. Смысл в том, что разместив по двойной симметрии и включив пропуск ресурсов, мы можем скопировать сепаратор со всеми прикрепленными к нему деталями и настройками (наводим на него мышкой - ALT + ЛКМ) и ставим еще раз с двойной симметрией под 90 градусов.
В этом случае, разделив парный отстрел боковушек на две ступени (ступень 1 и ступень 0 справа снизу) настройки перекачки топлива сформируются автоматически и ничего не надо будет трогать.
Все двигатели мы запускам разом удерживая адекватный ТВР тягой (1.8). Получится, что сначала все двигатели будут питаться из баков первых двух боковушек, а после отстрела, все двигатели будут есть из вторых двух боковушек, в этом случае, когда все 4 боковушки будут отстреляны, центральный бак останется полным и нетронутым, за счет чего дельта скорости будет хорошо распределена по ступеням. Раньше такие перекачки делались через жёлтые шланги в топливном разделе (можно сделать так и сейчас без включения пропуска ресурсов). С одной пары боковушек шланг из бака ставится в другую пару боковушек, а из второй пары боковушек в центральный бак, и всё будет абсолютно так же.

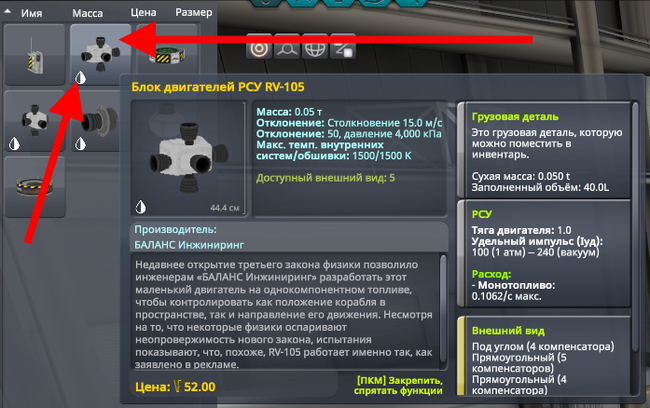
В качестве двигателей ориентации используем двигатель RV-105 (с переключением на второй вариант капелькой в левом нижнем углу - вариант с 5-ю соплами). С таким видом РСУ у вас будет меньше всего проблем, и в такой конфигурации можно обойтись всего 4-мя такими двигателями, но мы для простоты будем использовать 8 таких.
Касательно размещения РСУ (RSC). Размещать их следует равноудаленно от центра масс того, что вы собираетесь этими движками ориентировать и стыковать. Явно боковушки в космосе уже будет отстреляны, поэтому нам нужен центр масс последней ступени. На первом скриншоте, я пометил примерное место ЦМ красным крестом. Ставим двигатели на как можно более дальнем и одинаковом расстоянии от ЦМ с 4-ой симметрией.
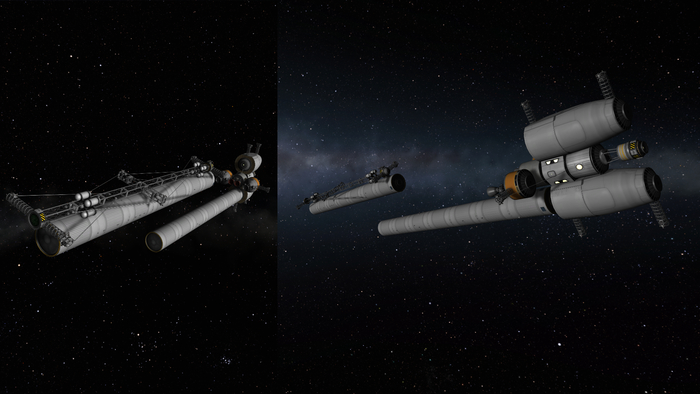
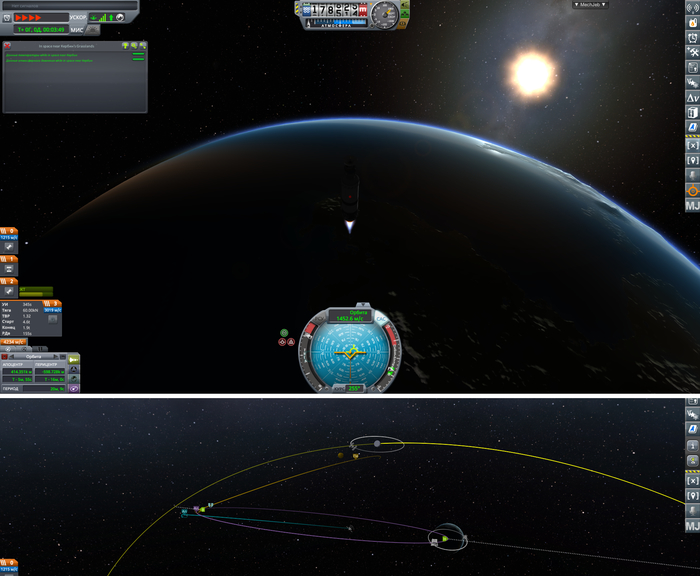
Выводим 1 аппарат на околокруговую орбиту высотой +- 100 км.
2-ой аппарат выводим на орбиту с другой высотой +- 200 км
Получается следующая картинка:
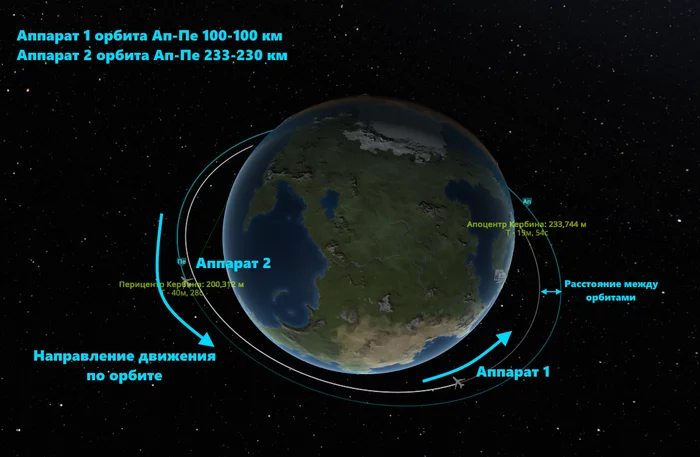
Далее необходимо понять достаточно фундаментальные зависимости и понятия. Космос огромный и встретиться просто так понятное дело - невозможно. Нам необходимо двум аппаратам подлететь друг к другу и замереть на месте. Т.е. необходимо чтобы орбита у обоих аппаратов была абсолютно одинаковой. Тогда возникает вопрос, зачем мы выводим два аппарата на разные высоты? Для понимания разберем небольшой пример:
Если мы запустим два аппарата со старта друг за другом к примеру с задержкой в несколько десятков минут и выведем на одинаковые орбиты, они будут вращаться вокруг земли с одинаковой скоростью, но на определенном расстоянии друг от друга (более 100 км) и не приближаться и не отдаляться друг от друга.
В этом случае возникает следующий вопрос.
Почему бы одному аппарату не ускориться и не догнать второй? А потому что сама орбита (эллипс с максимально удаленной от земли точкой (апогей Ап) и максимально близкой к земли точкой (перигей Пе)) напрямую связана со скоростью движения аппарата. Если мы меняем нашу скорость у нас изменяется траектория нашего движения вокруг земли, изменяется и апогей и перигей. Т.е. мы перестанем лететь по той же траектории, что летит второй аппарат из-за чего только улетим дальше от него.
Поэтому необходимо сделать манёвр перехвата. Вот что надо знать - чем ниже у нас орбита (чем ближе эллипс орбиты к земле) тем быстрее мы по ней летим, а чем выше у нас орбита, тем медленнее мы двигаемся. Исходя из этого, смотря на картинку сверху можно сделать вывод, что аппарат 1 двигается быстрее и совершает один оборот вокруг кербина за время меньшее чем аппарат 2. Исходя уже из этого можно сказать, что постепенно аппарат 1 (смотря на данную картинку) будет потихоньку догонять аппарат с обратной стороны. Будет всё ближе с каждым оборотом вокруг земли, и в определенный момент оба аппарата будет находиться на расстоянии равным расстоянию между их орбитами (отмечено на картинке).
По сути, чтобы построить маневр перехвата, нам нужно дождаться момента нужного оборота вокруг кербина, во время которого расстояние между объектами будет минимальное. Поняв что на текущем обороте вокруг кербина мы будем ближе всего, нам нужно скорректировать орбиту так, чтобы расстояние между орбитами в точке сближение было равно 0. В этом случае, в точке мы действительно встретимся с аппаратом на определенной дистанции, но за счет разных орбит у нас будет очень высокая скорость встречи, от несколько десятков метров в секунду до нескольких сотен.
Забавный факт, когда я начинал играть в KSP я подумал что будет довольно занятной идеей встретиться двум аппаратам если лететь по орбитам в две разные стороны (орбиты с 180 гр. отличия) я довольно серьёзно подошел к делу совместил точку перехвата до 200-300 метров и при встрече офигел, что поскольку аппараты летят в разные стороны, скорость пролёта мимо цели составляла несколько километров в секунду (помахал ручкой).
Чтобы минимизировать скорость встречи, необходимо сделать первый важный этап в маневре перехвата - совместить плоскости орбит. Т.е. сделать так, чтобы углы орбит 1го и 2го аппарата были одинаковые. Для этого мы на карте отмечаем целью второй аппарат. После чего видим два зеленых маркера. В и Н - восходящий и нисходящий узел
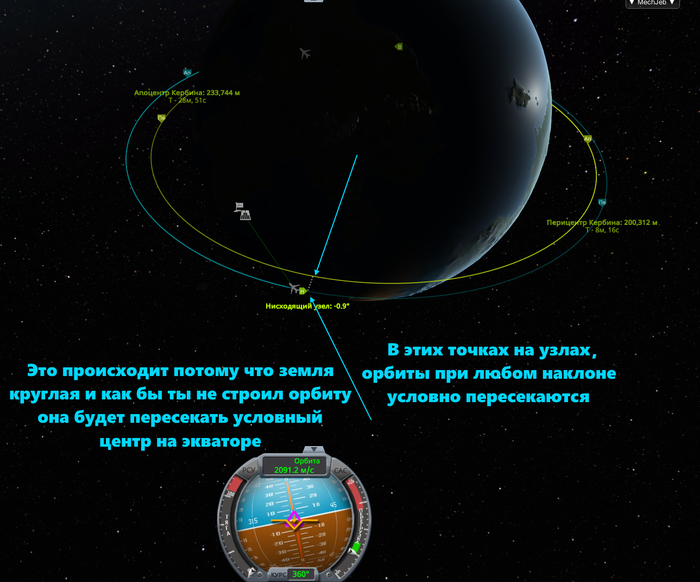
Далее мы выжидаем когда наш аппарат будет максимально близок к этому узлу и делаем прожиг в сторону - Нормали (если узел нисходящий) и Антинормали (если узел восходящий). Нормаль помечена на навиболе Фиолетовым трегуольником с точкой, а антинормаль другой схожей фиолетовой фигурой.
Прожигаем смотря прямо на карту и видим как узел постепенно приближается к 0. Для стыковки желательный угол не более 0,2 градусов, а лучше 0. Если угол будет больше, все равно можно совместить точки сближения, но скорость встречи мало того, что будет большой, так еще и будет изменяться каждую секунду за счет неточного угла.
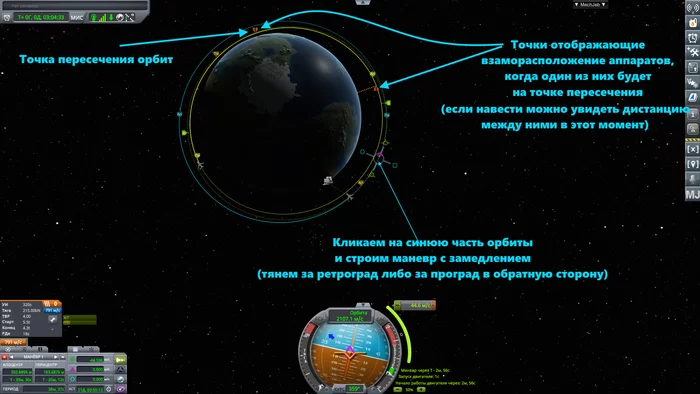
Далее мы можем либо просто подождать, как я писал выше круга, на котором мы будем ближе всего, либо заранее прикинуть маневр и дистанции. Точки пересечения будут видны после того как вы спланируете или выполните маневр.
Сам манёвр можно таскать за середину меняя время старта этого маневра (в нашем случае торможения (прожига на ретроград) т.к. мы будем тормозить с аппарата на внешней орбите, а не ускорятся с того что на внутренней. Таская манёвр мы будем видеть, что точки взаиморасположения аппаратов будем удаляться и сближаться, в зависимости от правильной и неправильной стороны в которые мы тянем манёвр.
Два варианта перехвата:
Вариант посложнее: Покрутиться на орбите и поподбирать маневр на ней таская его по времени старта, пока не удастся совместить точку встречи хотя бы в километрах 10-15. (Если всё сделать правильно то можно сразу свести до расстояния менее 1 км.)
Вариант полегче:
За счет этих инструментов и перемоток времени мы подгоняем точки пересечения орбит и делаем маневр (прожиг), чтобы сделать точку пересечения орбит и не смотрим как взаиморасполагаются аппараты.
После этого мы поймем, что каждый круг у нас дистанция между аппаратами в точке встречи будет сокращаться, либо удлиняться (если не повезет), но всё равно через определенное время начнет сокращаться. Просто ждем когда расстояние на встрече будет небольшим. Для кербина на высоте +- 100 км, считаю что 50 км, это максимальное расстояние, на котором можно пробовать делать сближения, иначе можно черпануть за верхние слои атмосферы и разбиться невнимательно выполняя следующие манёвры.
Что случилось если появились ещё и фиолетовые маркеры?
Это значит что вы сделали аппарату такую траекторию, что с орбитой второго аппарата она пересекается не в одной точке, а в двух и маркеры попарного цвета помогут так же сделать сближение в одной или другой точке или подогнать их манёвром. (В случае с двойным пересечением скорость встречи будет скорее всего выше)
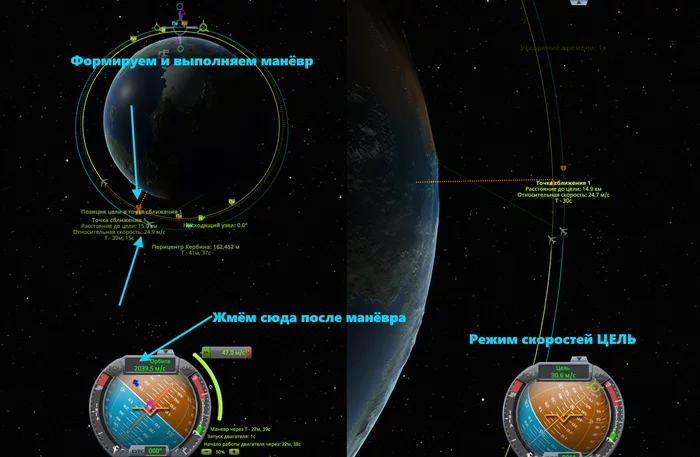
Когда у нас есть дистанция менее 50 км между аппаратами всё сводится к простой работе с навиболом (шаром ориентации снизу). Переключаем его с режима орбита в режим ЦЕЛЬ.
В целом о том что творится на навиболе. Благодаря нему мы можем понимать в пространстве куда смотрит нос нашего аппарата, а так же в какую сторону мы летим. Это практически всё что нужно знать чтобы сделать последующий перехват. (Кстати если вдруг не замечали, оранжевая часть поверхности навибола значит что мы смотрим в планету, а синяя от неё)
Когда мы находимся в режиме ПОВЕРХНОСТЬ или ОРБИТА мы видим значком зеленого кружка и трёх линий то направление в которое направлен наш вектор движения, а такой же значок с перечеркнутым кружком показывает обратное направление - против движения. Когда мы выбираем небесное тело или аппарат целью, у нас появляются на навиболе еще 2 значка. Фиолетовый круг состоящий из 4 частей и точкой по середине и фиолетовая точка с тремя линиями под 120 градусов. Первый значок означает то направление в котором находится цель, а второй значок логичным образом располагается на обратной стороне навиболе и показывает обратное от цели направление.
Когда мы переходим в режим навибола - ЦЕЛЬ, в графе со скоростью отображается НАША СКОРОСТЬ ОТНОСИТЕЛЬНО ЦЕЛИ. При этом у нас есть значок направления к ЦЕЛИ и значок ПРОГРЕЙДА (направление куда мы летим). Я думаю, что вы уже догадались, что используя один навибол, можно сделать прожиг так, чтобы ПРОГРЕЙД встал ровно на направление к цели и чем ближе мы к цели, тем более точно мы сможем с ней сближаться (Значок цели будет постоянно смещаться).
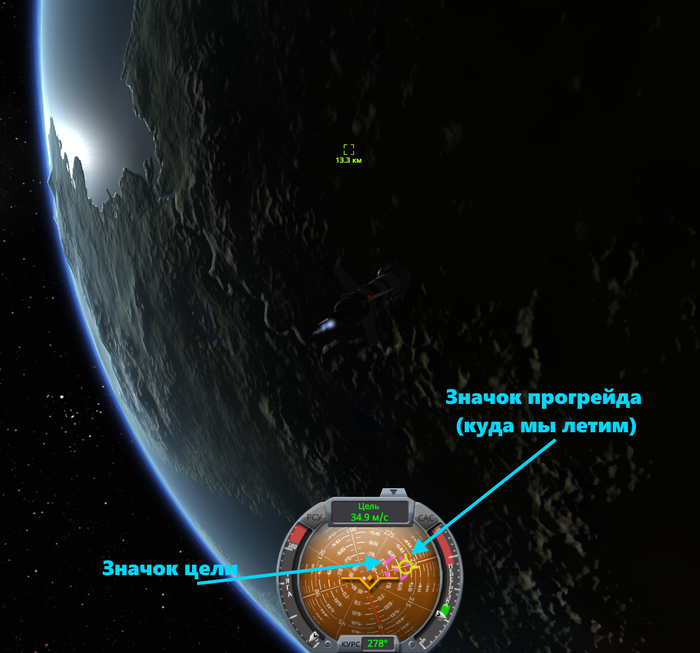
Из всего вышесказанного можно сделать вывод, что если значок прогрейда и значок направления цели будут видимы на одном экране навибола друг с другом вместе, то мы будем двигаться к цели (аналогично ретрогрейд и "от цели"), а если мы будем видеть значок "от цели" с прогрейдом либо "к цели" с ретрогрейдом - то отдаляемся.
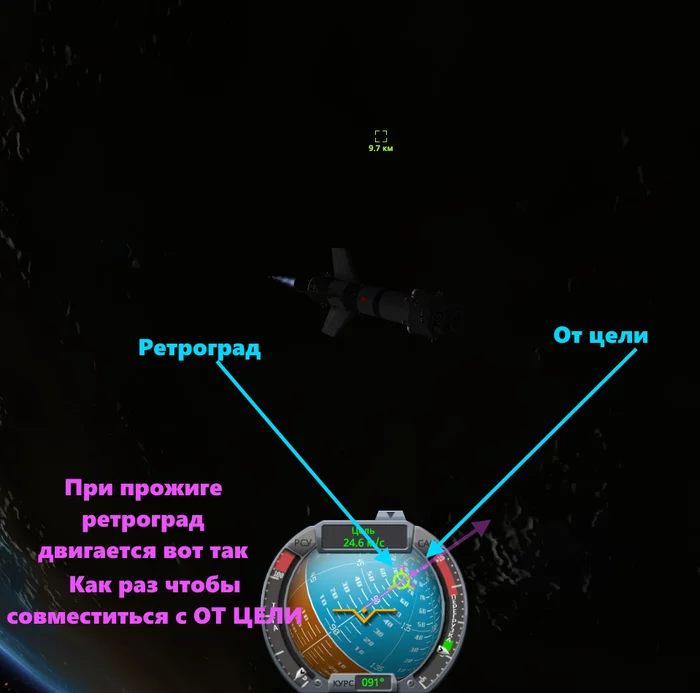
Далее необходимо понять как это дело туда-сюда движется. Когда мы становимся в определенную точку как на картинке сверху и прожигаем топливо. Значок прогрейда тянется к нашей текущей позиции, а так же в текущей ситуации прогрейд тянется к точке "К ЦЕЛИ" и в этом случае скорость движения к цели увеличивается.
Естественно сделать это на глазок за раз сложно и не выйдет, поэтому следующим этапом, мы просто удерживаем прогрейд в сторону цели и перематываем время пока он не убегает с цели. Как вы можете заметить ускоряться сильно и до бесконечности не стоит, потому что мы просто резко пролетим мимо. Поэтому когда мы окажемся довольно близко (меньше 5 км). Тоже самое действие можно проделывать со значком РЕТРОГРАД и ОТ ЦЕЛИ. Только в этом случае при прожиге РЕТРОГРАД не тянется к нашему положению, а наоборот УБЕГАЕТ от него в другую сторону, а скорость относительно цели уменьшается. (Ретроград необходимо удерживать на значке ОТ ЦЕЛИ).
Данными манипуляциями и перемоткой времени сокращаем дистанцию до 50-100 метров. (Чем ближе находимся к аппарату, тем больше стараемся снижать скорость относительно цели чтобы не пролететь). Когда дистанция станет небольшой просто встаём на ретрогрейд в режиме навибола ЦЕЛЬ и гасим скорость до нуля.
Поздравляю вы только что сделали манёвр перехвата. И кстати говоря, теперь вы можете перехватывать так любое небесное тело (луны, другие планеты).
Погасив же скорость до нуля мы будем спокойненько висеть рядом и практически не двигаться. Однако нужно понимать, что скорость на навиболе отображается с точностью до десятых частей, поэтому при перемотке времени мы всё равно будем слегка двигаться относительно второго аппарата.

Далее правой кнопкой мыши кликаем по порту которым хотим стыковаться на текущем аппарате - жмем УПРАВЛЯТЬ ОТСЮДА. Это перенесёт всё навибольные вещи именно на точку порта, что позволит более точно прицелиться для простой стыковки.
Кликаем правой кнопкой мыши по порту К КОТОРОМУ будем стыковаться - Задать цель.
Эти кнопки максимально правильно разместят на навиболе взаиморасполагающиеся маркеры К ЦЕЛИ и ОТ ЦЕЛИ, что позволит сразу же всё легко провернуть.

Далее вращаемся так, чтобы портом нацелиться на маркер К ЦЕЛИ (Нацеливаемся на порт)

Переходим на второй аппарат (горячая кнопка быстрого переключения "[" и "]" (на русской раскладке Х и Ъ) и делаем тоже самое (выставляемся на к ЦЕЛИ). Начинаем смотреть К ЦЕЛИ. В этом случае останется просто прожаться немного монотопливными двигателями и сделать небольшую скорость относительно двух целей (0.2-0.3 м/с) и удерживать цель и вектор движения.
Теперь как это сделать. Для начало разберем режим стыковки.

Режим стыковки включается снизу слева на второй значок сверху. После чего выползает вот такой вот экранчик как в левом углу, однако он по сути не сильно помогает.
Режим стыковки имеет 2 режима взаимодействия. ЛИН режим и ВРЩ. Переключаться между этими режимами можно горячей кнопкой ПРОБЕЛ - не бойтесь, в режиме стыковки ступени не срабатывают.
В режиме ВРЩ все наши кнопки работают как обычно на WASD и QE мы делаем Крен, Тангаж и Рысканье. В режиме ЛИН мы формируем смещения, т.е. при нажатии WASD мы смещаем аппарат как показано на рисунке ниже.

Обязательно включаем режим стабилизации (гор. клавиша T) без него после прожига РСУ мы будем мотаться как колбаса, если двигатели размещены не равноудаленно от центра масс.
В режиме ВРЩ мы ориентируемся, а в режиме ЛИН делаем смещения чтобы лететь куда надо используя кнопки. Расположение этого креста (WASD как на картинке выше, может быть развернуто относительно продольной оси аппарата (я нарисовал не совсем корректно где D на самом деле будет W и всё остальное так же сместиться на 90 гр, поскольку перед у аппарата где стекло у рубки с обратной стороны от текущего вида), поэтому можно сменить вид за которым летит камера на ФИКСИРОВАННЫЙ и понять всё будет намного проще (смена вида на гор. клавишу V).
По сути нам необходимо в режиме ЛИН включить на R РСУ и целясь в порт на навиболе немного нажать на Shift. Это датс нам небольшой импульс в сторону аппарата. После чего можно вернуться в режим ВРЩ и подгонять своё направление к порту (только желательно в режиме ВРЩ вырубать РСУ на R, чтобы неравномерным прожигом не сместить вектор движения) Если же при полете, мы видим, что наш прогрейд уходит от маркера К ЦЕЛИ, мы в режиме ЛИН с включенным R используем WASD чтобы разместить прогрейд на маркер к ЦЕЛИ. Чтобы легко застыковаться нужно иметь скорость 0.1-0.4 м/с. Когда вы будете рядом с портом, порт магнитом начнет притягиваться, и останется лишь в режиме ВРЩ правильно выставить аппарат, чтобы в точке соединения не было ПЕРЕЛОМА.
Если вы зашли с большой скоростью и после сцепки разлетелись - вставайтесь в режиме ВРЩ на прогрейд или ретрогрейд и используйте режим ЛИН, а так же SHIFT и CNTRL чтобы загасить скорость до нуля с помощью RSC. И снова потребуется либо развернуть оба аппарата друг к другу - лицом к лицу, либо же на РСУ сделать небольшой облёт, имея полученные знания и работая с навиболом и изображением.
Ваша первая стыковка принесет вам невиданное удовольствие и собирать корабли на орбите очень классно. Поэтому обязательно пробуйте и делитесь тем что у Вас получилось в комментах, а так же, не забывайте делать быстрое сохранение когда слетитесь близко, чтобы несколько раз иметь возможность попробовать постыковаться.
В дальнейшем разберу ситуацию как стыковаться не передними, а боковыми или максимально стрёмно расположенными портами и подобные вещи.
Пишите ваши вопросы и комментарии, присылайте что у вас вышло.
С Вами был Finn163. Спасибо за внимание.

Небольшой бонус моя станция из прошлой карьеры на орбите Гилли (спутник Евы) весом в 170 тонн (гнал туда с кербина 4мя или 5ю партиями и стыковался на орбите), а так же подключение топливных стержней для тягача космопоезда одного из модулей станции.
Добрый всем день! Меня зовут Finn163 и когда-то давно (2012 г. с версии 0.17) я люто играл и стримил Kerbal Space Program и активно общался на тематическом форуме, но в связи, что форум уже довольно непопулярный, и люди там общаются неактивно, я решил немножко попоститься здесь.
К моему счастью, люди до сих пор случайно наталкиваются на такой замечательный проект Kerbal Space Program и за кратчайшие сроки понимают теорию космических перелётов лучше чем за годы обучения в институте, по многим причинам, но в данном посте не об этом.
Собственно, я надеюсь, что все не игравшие к этому приобщаться, а игравшие найдут что-то полезное и интересное в моих постах. Я не претендую на максимальную правильность и буду очень рад критике и обсуждениям в комментариях, что ж - начнем!
Сложность и режим:
Вводные данные следующие. Я играю для удовольствия в режиме карьеры с довольно хардкорными настройками, из основных моментов - множители получения кредитов, науки и репутации 60% от 100. Т.е. получаю почти в два раза меньше чем нужно, и доходы в целом не слишком значительные - это толкает на необходимость брать и паралельно выполнять несколько контрактов, которые условно по пути. 200% штрафы вместо 100%. Экипаж при потере - теряется навсегда, шишки и опыт пилотам, инженерам и ученым придётся набивать заново. Аппараты и их детали греются при полёте через атмосферу, имеют пределы давления и перегрузок, при которых разрушаются (да, всё серьёзно). При этом кербалы (космонавты) теряют сознание от перегрузок с множителем 0.33 (т.е. вырубаются при перегрузках в 3 раза меньше чем обычно). Так же включены полные возможности телекома - т.е. спутник не может управляться, если нет достаточного сигнала со станции или ретрансляторов, а множитель дальности сигнала 65% от 100 (т.е. все антенны слабее и для дальних полетов нужна будет вполне серьёзная ретрансляционная сеть).
Из модов используются аддон для показания науки и где она не собрана, продвинутые приборки в кокпитах, мехджеб для окон характеристик, и планетарные станции для постройки планетарных баз. Фух. На этом всё.
Миссия:
Для тестового поста взял довольно простую миссию, вывести на экваториальную орбиту муны (луны) спутник с термометром.
Постройка:
Сам спутник выбрал максимально простой. С гиродином, мелкой батареей, температурным датчиком и датчиком давления. 4 Легких солнечных панели по кругу не дадут спутнику потерять питание. Для увеличения полезности миссии навесил только только открытый слабенький по мощности ретранслятор. Так же использовал простенький двигатель "Муравей" на 2 кН, и мелкий бак, что дало аппарату 1215 ед. дельты V (Вакуум). Данное решение необходимо, для корректировки орбит, если поступит соответствующее задание (как вы помните, доход за счет сложности низкий, а такие вещи будут требовать нулевых затрат денег). Вес получился довольно сносный - 615 кг. Теперь стоит задача построить ракету носитель, которая доставит и желательно выведут на примерно нужную орбиту муны аппарат, чтобы не тратить топливо самого спутника.

Добавляем сбрасываемый обтекатель, для улучшения аэродинамики весом в жестокие 240 кг (но лучше так, чем тереться деталями о плотные слои) и ступень с актуальным на текущий момент по технологическому дереву двигателю для космических перелётов "Терьер" на 60 кН с уд. импульсом (Вакуум) в 345 единиц. Используем 4.5 тонный бак (на сленге их раньше называли "Карандаш"). На данном этапе главное не пожадничать и не понатыкать баков для улучшения запаса дельта V. 4093 единиц более чем достаточно для ступени, тем более в такой конфигурации, у нас получается положительный ТВР (>1), что не позволит нам свалиться на Кербин (землю), если вдруг накосячим с просчетом других ступеней. Уже не кислые 5.831 Тонны получились.

Далее сам РН, который доставит всё это дело до космоса. Для данной карьеры я не использую метод собирания под каждый аппарат РН, а заранее сам собираю оптимальные РН на 5/10/15/20/30/40/50 Тонн (Имеется ввиду тонн выведенных на среднюю круговую 120 км орбиту), но в данном случае сделал исключение, поскольку нужно довольно четко уложиться в минимальную сумму на постройку ракеты, потому миссия выполняет всего 1 задание и растрачиваться на плохо оплачиваемую миссию - глупо.
Сам РН сделал 2-х ступенчатый.
В роли маршевого двигателя выступает LVT-45 "Вертлявый", который позволит управлять ориентацией ракеты за счет меняющегося вектора тяги. Хоть и Факел (LVT-30) имеет более эффективный удельный импульс в плотных слоях атмосферы, меньший вес и лучшую тягу, ставить его не стоит, (у него вектор тяги не меняется) - управлять ракетой будет крайне проблематично (гиродин у спутника слабоватый).
Поскольку одноступенчатые ракеты имеют довольно малый запас дельты, дополним его разгонным блоком.
Первичный разгон будет осуществляться совместно с маршевым двигателем твердотопливными ускорителями "Молот" на 4 радиальных сепараторах (чтобы отстегнуть при окончании работы и не тащить лишний вес).
Для подгонки тяги и дельты я использую стандартную правую панель. Я специально ограничил тягу до 37% у ускорителей, чтобы достичь необходимого мне ТВР = 1.80 (отношение тяги к силе тяготения) и максимально продлить время работы ускорителей. К сожалению, я слегка промахнулся и данные верны для вакуума, а не для атмосферы, поэтому в реале на старте тяга была 1.60 вместо 1.80, но об этом позже. Для отсутствия лишних колебаний установил 4 легких стабилизатора - крыла, и скрепил во второй точке ускорители короткими струтами (стяжками)

И последние доработки, стартовые опоры и укрепляющая конструкция - 4 радиально расположенные мелкие 8 угольные балки на ступени с Терьером и стяжки от них к предыдущей - основной ступени (тут как раз балки нужно было поставить на основную ступень, чтобы после расстыковки не тащить лишний вес, но балки легкие, так что не принципиально). Связь вертикальных сепараторов и нагрузка на кожух двигателя - самые слабые места у аппаратов. Без усилений, ракета будет сильнее вибрировать и может рыскать при полете с большой тягой, за счет дрейфа между деталями на стыке ступеней. Здесь аппарат легкий и признаю, что я слегка перестарался, но это почти ничего нам не стоило, поэтому почему бы и нет?
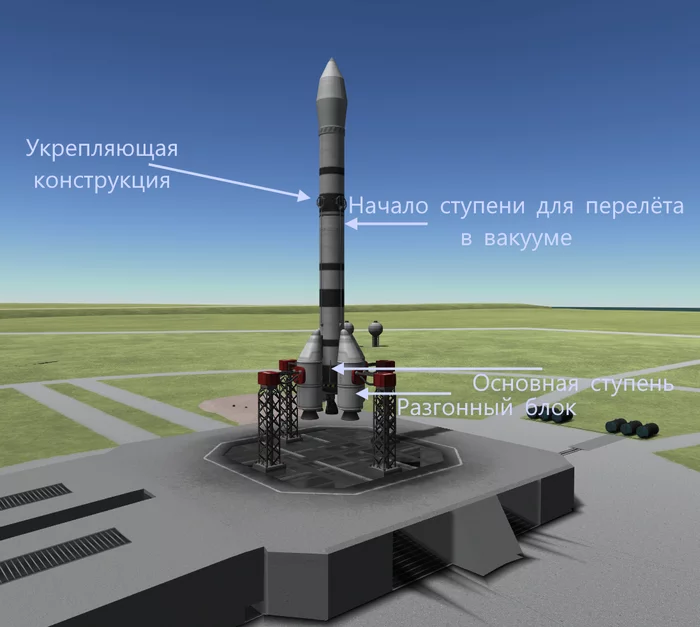
Аппарат вместе с РН получился на 31.865 Тонн веса и имеет прицельный вакуумный запас дельты в 7672 единицы. Что вполне хватит для текущей миссии.
Стартовый ТВР я использую порядка 1.6-1.9 ТВР (чаще всего 1.8), но в данной ситуации, из-за того что забыл вернуть на режим атмосферы, стартовый ТВР вышел в 1.6, что условно в допуске.
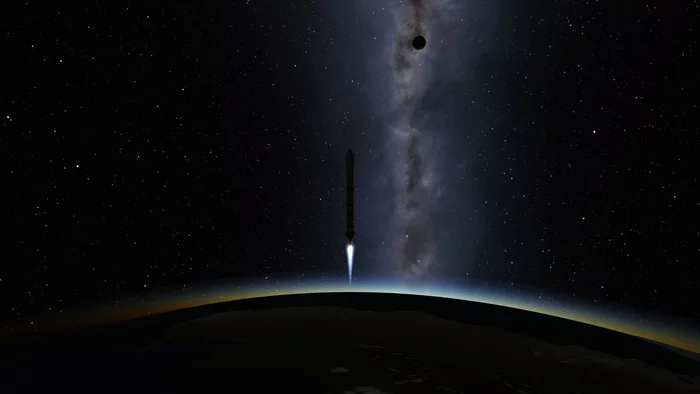
Сам полёт был запланирован на ночь. Для упрощения я не буду выходить на орбиту Кербина, а сразу полечу на перехват Муны (вполне рабочая схема, хоть и не всегда самая оптимальная, но максимально простая). Собственно для не игравших поясню, что если так взлететь и промахнуться мимо луны, что вполне себе запросто то свалишься обратно на кербин, орбитой там и не пахнет. Заходя вперед скажу, что с взаимным расположением я промахнулся, поэтому на орбиту муны залетел не с той стороны, что вызвало проблемы, но об этом позже.

Ночной старт это конечно глаз выколи, но что поделать. Взлетаем просто вертикально вверх и стараемся максимально удержать вектор движения, благо САС с такой конструкцией + LVT 45 отлично и сами с этим справляются - максимально ленивый взлёт.
Как и говорил ранее немного промахнулся с ТВР, собственно зачем нужно поддерживать правильный ТВР, окромя того, что иначе можно банально не взлететь? Ответ простой, есть такая штука как терминальная скорость - простыми словами, если мы будем лишь слегка преодолевать силу тяжести, то мы будем тратить много топлива (дельты) на борьбу с гравитацией, а не на набор скорости, если же мы вкатим ораву двигателей и будем делать ОГРОМНЫЙ ТВР (>3), то мы будем неоптимально использовать топливо по причине излишнего трения об атмосферу, пока она плотная. В целом можно на кербовикипедии нагуглить терминальные скорости для определенных высот, но проще всего соблюдать кербинский ТВР на уровне 1.6-1.9, до того как атмосфера не станет достаточно разряженной (20-35 км.)
Как можно заметить на навиболе на данной высоте моя тяга сильно убавлена (где-то до 50%) это вызвано как раз необходимостью поддерживать адекватный ТВР. Твердотопливные разгонные блоки работают всегда с одинаковой тягой и не регулируются в полёте, соответственно при прожёге их топлива, вся ракета постепенно становится сильно легче, а тяга от двигателей не убавляется, из-за чего ТВР растет в небольшой, но всё же геометрической прогрессии. За счёт этого мы убавляем тягу нашего маршевого двигателя и максимально экономим запас топлива (дельты), а при наборе высоты наш удельный импульс (эффективность использования топлива на единицу тяги) растёт чем ближе мы к вакууму.

Разгонный блок скинут на высоте порядка 30 км. и далее мы имеем опять же оптимальный ТВР для дальнейшего разгона без проблем с гравитацией и трением. Сам же обтекатель можно отстегнуть на высоте 50-60 км - там трение уже незначительное, а сброс 200 кг сэкономит еще немного дельты пока работает основная ступень.
Основная ступень вытолкнула нас где-то на 1/3 расстояния до луны. Обтекатель уже сброшен (увы, не запечатлил). После окончания в ней топлива отстыковываемся и остаемся с комической ступенью с более эффективным в космосе двигателем, хоть и более слабым. Смысл в этом конечно же в том, что во-первых нам уже не нужна тяга в 215 кН и нам не нужно обилие пустых баков и вес этого тяжелого маршевого двигателя. Терьер в 3 раза легче LVT 45 (0.5 т. против 1.5 т) и условно на 10% эффективнее по тяге (но в данном случае вес решает очень значительную роль).

Разгоняемся до точки встречи и пока что отключаем двигатель.
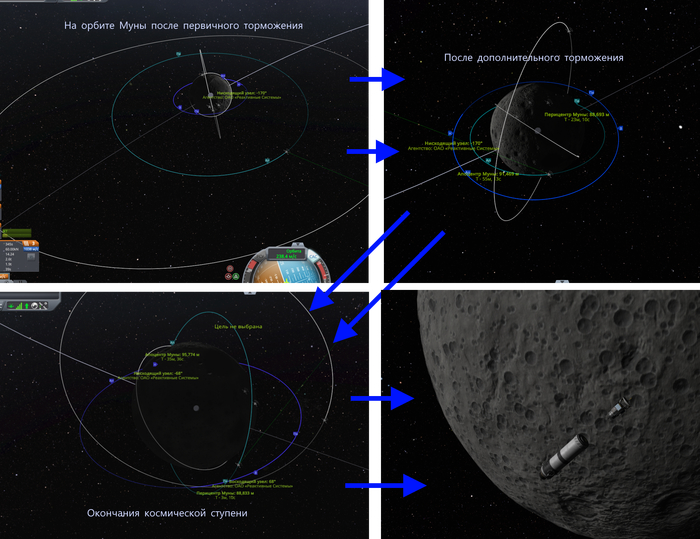
К сожалению, я не посмотрел на направление требуемой орбиты у спутника в миссии, и не заметил что зашёл не с той стороны на орбиту. Белой стрелкой отметил как нужно было в контексте этой миссии

После торможения на Перегее (ближайшей точке к телу) получилась +- округленная орбита, но угол орбит (моей и требуемой) отличался на 170 градусов. Смена угла орбит КРАЙНЕ затратное по топливу занятие, даже в том случае, если это более 15-20 градусов. Мне же необходимо развернуться и лететь считай в другую сторону. Для максимальной экономии, я в первую очередь замедляюсь на апогее (дальней от тела точке) формируя перегей в 90 т. км. Это делаю два раза, чтобы получилась орбита как на правом верхнем скрине - круговая с высотой в 90 км. Чем ниже будет орбита - тем меньше потребуется дельты для смены угла. Однако поскольку поворот слишком большой, совсем низкая высота (10-15 т. км.) при неверном маневре может расшибить нас о Мунный грунт - не рискуем. Запас DeltaV у нас достаточный.
Космическая ступень заканчивается, когда остается 68 градусов разворота. Отстегиваем её, и у нас остается неприкосновенный запас для корректировки орбит самого спутника (1200 Дельты если забыли). На нём и вылезем из этой ситуации. Казалось бы, а откуда в микроскопическом баке с 200 кг топлива столько дельты (до этого 4000 дельты у нас было почти в 5 тоннах топлива)? Ответ крайне простой вес последней ступени чуть больше 600 кг, поэтому даже при таком маленьком запасе и неэффективном, но максимально лёгком двигателе "муравей" мы можем себе позволить такие манёвры.
Корректируем и всё готово. В запасе 566 дельты для коррекции орбиты на следующие задания. Немного, но на одно, а может и два задания хватит.


Итого потрачено на миссию 17.5 т. кербобаксов. При доходе в 65 т. кербобаксов. Собственно последующее когда-нибудь задание на корректировку орбит как раз скорее всего перекроет стоимость запуска.
Пишите, нравятся ли Вам такого рода посты. В будущем планирую более интересные миссии, или объяснения механик, а так же меньшее количество информации для людей неигравших, и больше интересного материала.
Всем спасибо за внимание! Не забывайте этот замечательный проект!
Выбери Орду или Альянс в тщетной попытке найти то во что хотелось бы изо дня в день играть. Выбери расу, выбери модные прическу своему персонажу, выбери класс тщательно прочитав его описание. Выбери сделать все квесты в стартовой локации, и помочь мелколевельным новичкам. Выбери столицу и профессию, чтобы попадала под класс и приносила деньги, выбери одеваться в модные шмотки на аукционе и толкать всякую смешную дурь по огромным суммам. Выбери рыбалку и кулинарию, чтобы как можно дольше сидеть на ранних локациях и щеголять с чувством превосходства. Выбери летать в даларан от нефиг делать. Выбери гильдию, выбери ездовое животные. Выбери нейтральные территории чтобы махаться с альянсом. Выбери мелкие квесты с внезапно драматическим сюжетом, способным растрогать. Выбери разочарование в том что игра уже не такая современная и что никогда больше не зарубишь в нее с друзьями. Выбери бесконечное сожаление что не смог в неё наиграться. А потом откинься и съешь вкусных пельменей перед компом как в старые добрые времена и вспомни как это было ох??нно


Доброго всем дня.
Этот пост меня сподвигло написать конкретная проблема с геймпадом, которая на самом деле и не проблема вовсе, но поскольку про неё не было написано ровным счетом - нигде, решил внести свою лепту и помочь владельцам устройства, так же, этот пост можно считать и небольшим обзором. Я не рекламирую и не гонюсь за плюсами или еще чем-либо, просто надеюсь, что у людей, которых возникнет проблема, нагуглиться ссылка на этот пост и все успешно настроится.
Небольшая помарочка, если вдруг вы случайно наткнулись на этот пост. Говорить буду о интересном беспроводном геймпаде EasySMX-9110 или сокращенно ESM-9110. Вот таком:

Геймпад, с моей точки зрения довольно занятный, а мультиплатформенность (PC,Android,N Switch, PS3) и довольно необычные плюшки, в купе с приятной ценой относительно оригинальных боксовских и пс-овских геймпадов, делают его крайне привлекательным.
Найти его можно на али за +- 2 т.р.
Из плюсов
- Включил и играешь. Не надо ничего настраивать, для игры на ПК. Лично мной проверено и с Nintendo Switch, без малейших проблем подключается и даже передает все вибрации.
- Отличный виброотклик
- Добротная сборка, без люфтов, без километровых щелей и по-моему подойдут боковые накладки от XBOXовского контроллера
- Встроенный аккумулятор на 600 mAh (хватает на долго, а перед тем как полностью отрубится показательно выключает вибрацию и продолжает пахать и пахать) К слову, индикатором разрядки в геймпаде выступает центральные светодиоды на лицевой панели с кнопками. При напряжении менее 3.5В, они начинают мигать, а виброотклик перестает срабатывать, что значит пора бы заряжаться. По паспорту должен работать 8 часов, но по моим ощущениям, я прошел Fallen Order без единой подзарядки, периодически по пару часов гоняя в NFSку 16го года. С вторым уровнем подсветки и центральным уровнем вибрации.
- По заверению разработчиков, довольно точные стики. По моему скромному мнению, похоже на правду :)
Плюшки!
Их тут сразу несколько!
- Во-первых - довольно интересный дизайн, кнопки из прозрачного акрила, в купе с подсветкой кнопок и правого стика, очаровывают!
- Во-вторых - Геймпад имеет целых две необычных кнопки снизу, одна из которых отвечает за регуляцию подсветки, а вторая за силу вибрации. При этом имеется целых 5 уровней и подсветки и вибрации, от уровня выключено (в т.ч. выключить можно и подсветку и вибрацию), до уровня яркий ночник в случае подсветки и вибромассажер в случае вибраций.
- В-третьих до ужаса удобные программируемые кнопки, из-за которых собственно и появился этот пост! После этого геймпада даже не могу представить, как можно без них. А вот и они:

Снизу в виде качельки слева и справа располагаются четыре кнопки, которые названы разработчиком как М1,М2,М3 и М4. Нажимаются крайне удобно - М2 и М4 - нажимаются лежащими пальцами в бок, а М1 и М3 - вверх (чуть менее удобно, но привыкаешь).
Самое занятное, что в руководстве пользователя на чертежах устройства, они так же присутствуют, но абсолютно никак не помечены и о них нет ни слова, ни сноски.
Настройка программируемых кнопок M1,M2,M3,M4
По умолчанию кнопки установлены на повтор кнопок Y,X,B,A (по нумерации соответственно). В какой-то момент, кнопки М2 и М4 у меня просто перестали работать. Виной тому оказался племянник, который что-то где-то перенажимал. Копаясь в чем только можно и на официальном сайте и в инструкции пользователя, а так же на интернет форумах не было найдено ровным счетом ничего, что могло бы помочь и на помощь в таком случае могло прийти только высокотехнологический метод клин-клином, или метод тыка. Систематизированно нажимая различные кнопки во внезапном приступе поиска правды я выявил то, о чем разработчики умолчали. Нажимая на некие кнопки я увидел, что основной синий цвет подсветки правого стика вдруг менялся на розовый и как-то странно себя вёл при нажатии других клавиш.
Оказалось, на кнопки можно не просто забивать другие кнопки, но и забивать макрос!
Не знаю зачем это надо было умалчивать, может просто не хотели объяснять.
Итак как поставить на любую из кнопок М1-М4, любую другую кнопку или макрос:
Шаг 1: Включить подключенный геймпад, дождаться сопряжения (возможно не обязательный шаг)
Шаг 2: Зажать кнопку START (правая верхняя на центральной панели)
Шаг 3: Нажать на кнопку М1, М2, М3 или М4, в зависимости от того, какую хотите настроить не отпуская кнопку START.
Шаг 4: Отпустить всё. Если вы всё сделали правильно подсветка правого стика загорится розовым.
Шаг 5: Нажать или зажать кнопку (если нужна только кнопка) либо же в нужном темпе и последовательности пронажимать кнопки если нужно сделать макрос. При нажатии на кнопки с розового цвет будет меняться на синий.
Шаг 6: Снова нажать на ту нижнюю кнопку которую мы программируем и которую ранее зажимали с зажатым стартом (М1, М2, М3 или М4)
Шаг 7: Готово! Если вы все сделали правильно, то цвет с розового обратно вернется в синий.
Проверить как работает кнопка и макрос можно в панели управления, пройдя по пути - Панель управления -> Устройства и принтеры -> ESM GAME FOR WINDOWS (значок геймпада). На значок геймпада с ранее указанной надписью кликаем правой кнопкой мыши и выбираем -> Параметры игровых устройств -> Свойства
В полученном меню мы видим тестовый экран для проверки нажатия на кнопки геймпада, в котором легко можно увидеть как срабатывает ваша кнопка или макрос, чтобы если что его поправить.
Так же, я принимал попытки пронажимать кнопки, чтобы вычислить возможность в игре забить кнопку М1-М4 как абсолютно отдельную от базовых X,Y,A,B, но данные попытки не увенчались успехом. Кнопки можно использовать лишь как повтор имеющихся, что все равно крайне полезно.
Еще немного внимания хотелось бы уделить кнопке TURBO (не знаю зачем она нужна). Про неё есть пару строк в инструкции, но если вы вдруг упустили или у вас что-то плохо работает, и при этом на геймпаде правый стик горит красным вместо синего, значит случайно вы включили TURBO и теперь нажимая на какую-то кнопку, она у вас нажимается 9999 раз в секунду. Можно просто выключить-включить геймпад и ситуация решиться, либо же зажать турбированную кнопку и зажать кнопку TURBO. Собственно такими же действиями турбо режим для любой кнопки и включается.
Очень надеюсь что помог вам с настройкой дополнительных кнопок для ESM-9110 . Ведь во всех обзоров люди говорят, что просто не разобрались.
В завершение все таки расскажу немного о минусах данного геймпада:
- Центральная часть выполнена из акрилоподобного материала, которая лапается пальцами.
- Блок для включения в компьютер, довольно длинный, как длиннющая флешка. (Разбирал, длина нарощена искусственно, платы дай бог на сантиметр)
- Захваты под пальцы снизу ожидал из прорезиненного материала (как в чуть младшей версии без подсветки и доп. кнопок), а оказались из хорошего рифленого пластика.
Резюмируя, я могу сказать, что нашел для себя прекрасный вариант геймпада, которым полностью доволен, все минуса довольно спорные, а доп. кнопки напрочь перечеркивают всё плохое, когда ты играешь и не чувствуешь себя ущемленным, т.к. все кнопки у тебя под рукой и не требуется скакать со стиков на кнопки и обратно.
Однозначно рекомендую.
Спасибо за внимание! Надеюсь был полезен!
Привет! Как-то встретился пост про то как карп за мягкое место укусил ребенка, и написал вот этот комментарий и как ни странно - нашел отклик и пару подписчиков. Так что напишу пару постов, раз уж так.
Кто не знает - Dwarf fortress это крайне объемная стратегическая игра с непрямым управлением, где мы держим крепость бородатых дворфов не имея вдобавок привычной в современном смысле графики, но имея огромное количество возможностей. Вдаваться в рассказы о самой игре не буду, только о том, что необходимо для понимания различных ошибок и забавностей, с игрой связанных. Поехали!
Баг с котами или её величество - КОТОСТРОФА
Перед началом похода для постройки крепости мы можем только несколько часов собирать экипировку и настраивать профессии нашего будущего контингента, в том числе мы имеем возможность взять с собой разнообразную живность, в частности котов. Так как в игре у каждого бородатого дворфа есть даже левый и правый носок и прочие мелкие части одежды, не удивительно, что в игре есть и различные паразиты, например мыши, которые запросто могут хозяйничать на наших продовольственных складах поедая трудом добытую пищу. Соответственно большинство игроков изначально берут с собой пару кошек\котов, чтобы такие вещи полностью исключить. При этом Dwarf Fortress игра достаточно масштабируемая и если начинаем мы всего горсткой в пол десятка дворфов, то в последствии наше поселение может разрастить и до 100+ жителей. И тут могут возникнуть миллион проблем, в частности - КОТОСТРОФА. За долгое или даже не очень время кошки могут запросто наплодиться настолько, что станет ужасно за этим наблюдать, как крепость из дворфской превращается в кошачью. B тут возникает логичной вопрос - Что делать? Проблема в том, что кошки потребляют какую-никакую еду и кроме всего прочего привязываются автоматически к какому-либо дворфу становясь его питомцем. Это приводит к тому, что если начать пускать излишки котов и кошек на фарш, дабы прокормить крепость, то хозяева кошек сильно огорчаются при их смерти, и если процесс вивисекции довольно глобальный может случиться состояние массовой истерии, когда все становятся расстроены настолько что начинается форменное безумие и кровь течет рекой, поэтому в таких ситуациях возможно вивисекция не только кошек, но и их хозяев, дабы хоть как-то избавиться от проблемы. Благо из-за жалоб на эту проблему добавили новую профессию - кастратора - которая позволила контролировать популяцию и недопускать такой дичи.
Раз уж пошло про кошек, то еще один из моих любимых багов:
Кошки довольно полезные животные, потому что они превосходно борются с вредителями, вроде мышей. И как мы уже выяснили у каждой кошки есть свой хозяин, поэтому не редка ситуация, когда кошка хочет перенести труп мышки к своему хозяину дабы похвастаться, но вот незадача, в давние времена, в коде игры было прописано - Чтобы что-нибудь перенести - тебе нужны руки, в то время когда у кошки прописаны 4 ноги. Соответственно кошка потихоньку думает - "Мне нужно перенести мышь!" - "Но для этого нужны руки" - "А у меня рук нет" - "А почему у меня рук нет!!??" - "ЗНАЧИТ МНЕ ИХ ОТОРВАЛО!", после чего она начинает истошно вопить в оповещения что ей оторвало руки, что правда ей не мешает заниматься дальше своими кошачьими делами.

Для первой части хватит. Посмотрим как зайдет :)
Всем добра, играйте только в хорошие игры.
Листал Авито и наткнулся. На что только не пойдешь, чтобы сбагрить ненужные вещи
Доброго времени. В Самаре, в красноглинском районе нашли собаку. Белая, с грустными глазами, без ошейника. С виду домашняя, раньше в здешних местах не встречал и подобных не видел. Вдруг, кто знает чья, или хозяин пикабу просматривает.
Скорее всего кабель. Находится в поселке Красная глинка на 4-ом квартале, в доме 11. (3-ий подъезд)
В случае чего, звоните по телефону +7 917 153 53 12 или пишите в вк - https://vk.com/nictr
Надеюсь удастся найти хозяина. Не для плюсов.


Напоминаю, некоторые анекдоты необычные, некоторые странные, а некоторые могут показаться вполне обыденными, но в любом случае читать их нужно с хорошим настроем и правильной интонацией, вживаясь роль. Все повторения случайны. Анекдоты взяты из личной коллекции.
Прошлые части можно увидеть у меня в профиле.
------------------------
Сидит русский в кафе к нему официант подходит:
-Вы русский.
-Да, как вы узнали?
-А в начале анекдота написано
------------------------
В суде:
— Вопросы есть?
— Если кентавр совокупится с русалкой, у них родится наполовину человек, на четверть рыба и на четверть лошадь?
— Я имею в виду, к свидетелю.
— К свидетелю вопросов нет, ваша честь.
------------------------
– Как называется типаж мужчины, который бьет жену и детей, но при этом любит песни Луиса Фонси?
– ДЕ-СПО-ТИЧНЫЙ
------------------------
— Папа, а правда, что генномодифицированные продукты могут вызвать мутацию?
— Что ты плетёшь?!
— Паутину. Так что с мутацией?
------------------------
Одесский дворик.
- Зяма, сынок, иди обедать!
- Я пообедал у Павлика, мам!
- Ой, ну это не сын, а золото!
------------------------
- Девушки вы из Саратова?
- Набережные Челны.
- Набережные Челны вы из Саратова?
------------------------
Две подружки отпросились у мужей на девичник. В кафе выпили лишнего, закусили непойми чем. Шли домой пьяненькие, забурлило в животах. Присели у свалки рядом с кладбищем.
Одна подтерлась своими трусами, вторая оторвала кусок ленты на венке.
Утром один взбешенный муж звонит другому:
- представляешь, моя спит, в стельку пьяная, без трусов.
- у моей вообще в заднице бумажка с надписью "мы никогда тебя не забудем. 12-я пожарная бригада".
------------------------
На прапорщика, когда он шёл по стройке, падает кирпич. Он снял фуражку, потёр шишку.
- Безобразие! А если бы человек шёл - так ведь и убил бы на*уй!
------------------------
Мужик-сторож охраняет яблоневый сад ночью. Вдруг - чу! Шорохи. "Ну,-думает,- Яблоки кто-то ворует..." Выходит - точно: с ближайшей яблони ноги свисают и мешок, и в тот мешок яблоки закатываю. Ну сторож подошел тихонько и хвать промеж ног за яйца:
-Ты кто такой, откуда?
В ответ тишина...
Ну он сжал посильнее:
-Как зовут, где живешь, спрашиваю!
Тишина...
Сжал так, что аж по руке потекло:
-Имя, фамилия, отчество, где живешь! Отвечай быстро!!!
Сдавленный голос:
-Яков я...
Сторож:
-А чего молчишь!!!
Сдавленный голос:
-Немой я...
------------------------
Разбился самолёт над пустыней, выжили два армянина, решили открыть шиномонтажку. Проезжает мимо бедуин на верблюде, говорит: "Помогите по братске, верблюд совсем не едет!". Армяне отошли, подумали-подумали, дернули верблюда за яйца, тот убежал.
Бедуин: "Ваааах, спасибо ребята, но как я его теперь догоню?" Армяне отошли, подумали-подумали, дернули бедуина за яйца, он побежал. Радуются армяне: "Ваааа!!! Как мы хорошо придумали!".
Тут один говорит: "Слющай, он же нам не заплатил, как мы теперь его догоним?". Подумали-подумали, дернули друг друга за яйца и побежали.
------------------------
Лежат муж с женой ночью в постели.
Жена:
- Что-то курить хочется. Пойди купи сигареты.
Муж с неохотой встаёт, одевается. Выходит на улицу - всё закрыто. Смотрит - бар открыт. Зашёл, сел за стойку, заказал себе выпить. Рядом подсела девушка. Ей тоже заказал выпить. Разговорились. Предложил проводить её домой. Проводил. Она предложила выпить у неё кофе. Он согласился. После кофе они занялись сексом. В 6 утра мужик проснулся с мыслью: "Жена же меня за сигаретами послала!"
Говорит девушке:
- У тебя есть мел?
- Есть.
- Дай быстро!
Девушка дала мел и с интересом наблюдает за мужиком. Он намазал руки мелом и пошёл домой.
Жена в истерике спрашивает:
- Ты где был???
- Знаешь, дорогая, я вышел, смотрю все закрыто. Смотрю - бар открыт. Зашёл, сел за стойку, заказал себе выпить. Рядом подсела девушка. Ей тоже заказал выпить. Разговорились. Предложил проводить её домой. Проводил. Она предложила выпить у неё кофе. Я согласился.
После кофе мы занялись сексом. В 6 утра я проснулся с мыслью: "Жена же меня за сигаретами послала!" и вот пришёл.
Жена, сделав ехидное лицо говорит:
- А ну, руки покажи!
Мужик с виноватым видом показывает руки.
Жена:
- Опять с*ка всю ночь в бильярд с друзьями играл???
------------------------



